- Система розпізнавання дорожньої розмітки в режимі реального часу на основі мобільного пристрою

Содержание
- 2. Мета та постановка завдання Метою кваліфікаційної роботи є розробка системи розпізнавання дорожньої розмітки з функцією звукового
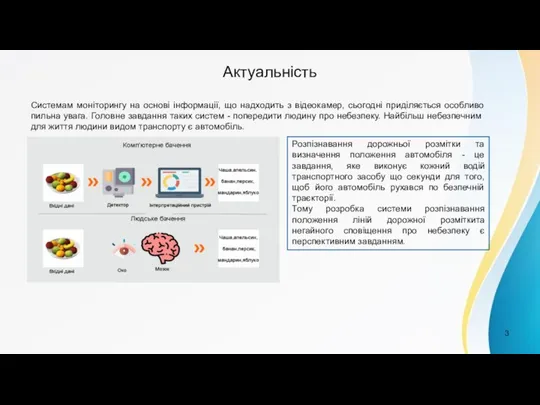
- 3. Актуальність Системам моніторингу на основі інформації, що надходить з відеокамер, сьогодні приділяється особливо пильна увага. Головне
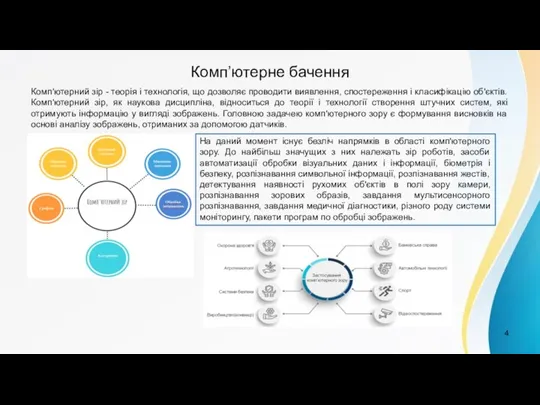
- 4. Комп’ютерне бачення Комп'ютерний зір - теорія і технологія, що дозволяє проводити виявлення, спостереження і класифікацію об'єктів.
- 5. Автоматизація руху транспортних засобів Більшість автомобільних концернів сьогодні ведуть роботу зі створення автономного транспорту: безпілотні автомобілі,
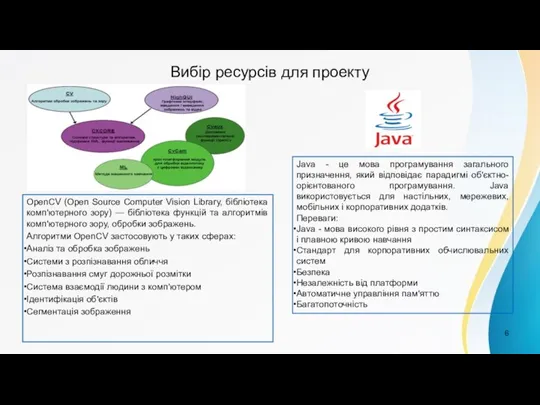
- 6. Вибір ресурсів для проекту Java - це мова програмування загального призначення, який відповідає парадигмі об'єктно-орієнтованого програмування.
- 7. Життєвий цикл Android застосунку Всі додатки Android мають строго певний системою життєвий цикл. При запуску користувачем
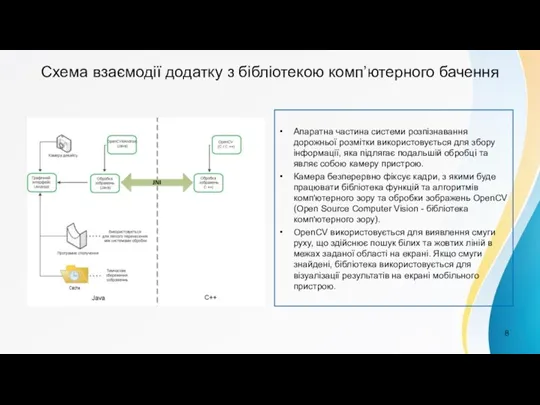
- 8. Схема взаємодії додатку з бібліотекою комп’ютерного бачення Апаратна частина системи розпізнавання дорожньої розмітки використовується для збору
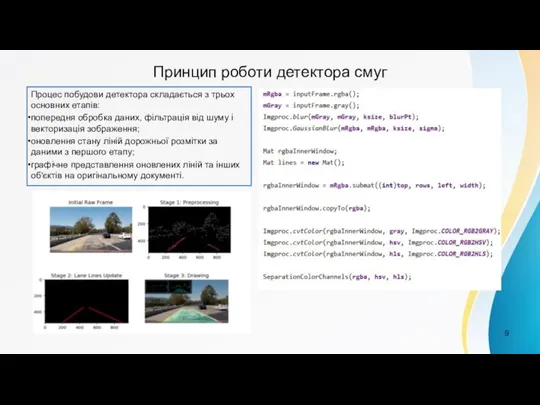
- 9. Принцип роботи детектора смуг Процес побудови детектора складається з трьох основних етапів: попередня обробка даних, фільтрація
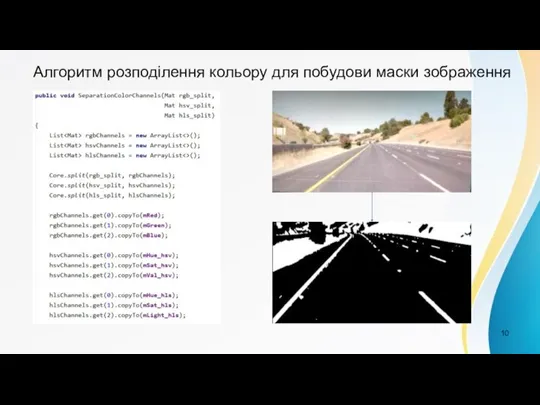
- 10. Алгоритм розподілення кольору для побудови маски зображення
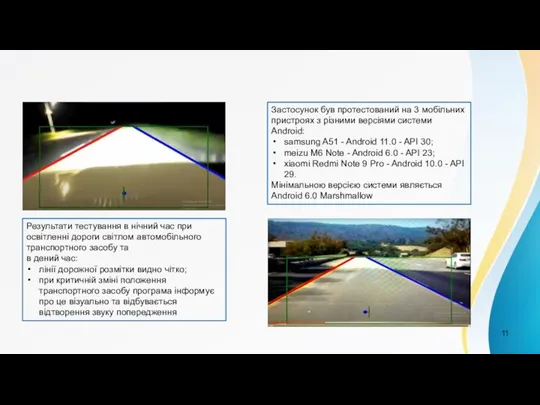
- 11. Тестування застосунку в реальних умовах Результати тестування в нічний час при освітленні дороги світлом автомобільного транспортного
- 13. Скачать презентацию
Слайд 2Мета та постановка завдання
Метою кваліфікаційної роботи є розробка системи розпізнавання дорожньої розмітки
Мета та постановка завдання
Метою кваліфікаційної роботи є розробка системи розпізнавання дорожньої розмітки
Слайд 3Актуальність
Системам моніторингу на основі інформації, що надходить з відеокамер, сьогодні приділяється особливо
Актуальність
Системам моніторингу на основі інформації, що надходить з відеокамер, сьогодні приділяється особливо
Слайд 4Комп’ютерне бачення
Комп'ютерний зір - теорія і технологія, що дозволяє проводити виявлення, спостереження
Комп’ютерне бачення
Комп'ютерний зір - теорія і технологія, що дозволяє проводити виявлення, спостереження
Слайд 5Автоматизація руху транспортних засобів
Більшість автомобільних концернів сьогодні ведуть роботу зі створення автономного
Автоматизація руху транспортних засобів
Більшість автомобільних концернів сьогодні ведуть роботу зі створення автономного

Слайд 6Вибір ресурсів для проекту
Java - це мова програмування загального призначення, який відповідає
Вибір ресурсів для проекту
Java - це мова програмування загального призначення, який відповідає
Слайд 7Життєвий цикл Android застосунку
Всі додатки Android мають строго певний системою життєвий цикл.
Життєвий цикл Android застосунку
Всі додатки Android мають строго певний системою життєвий цикл.

Слайд 8Схема взаємодії додатку з бібліотекою комп’ютерного бачення
Апаратна частина системи розпізнавання дорожньої розмітки
Схема взаємодії додатку з бібліотекою комп’ютерного бачення
Апаратна частина системи розпізнавання дорожньої розмітки
Слайд 9Принцип роботи детектора смуг
Процес побудови детектора складається з трьох основних етапів:
попередня обробка
Принцип роботи детектора смуг
Процес побудови детектора складається з трьох основних етапів:
попередня обробка
Слайд 10Алгоритм розподілення кольору для побудови маски зображення
Алгоритм розподілення кольору для побудови маски зображення
Слайд 11Тестування застосунку в реальних умовах
Результати тестування в нічний час при освітленні дороги
Тестування застосунку в реальних умовах
Результати тестування в нічний час при освітленні дороги
 Дефекты термической обработки стали
Дефекты термической обработки стали ОСНОВНЫЕ ИНСТРУМЕНТЫ ПРОЕКТНОГО АНАЛИЗА
ОСНОВНЫЕ ИНСТРУМЕНТЫ ПРОЕКТНОГО АНАЛИЗА  Жилье_KZ_11.21
Жилье_KZ_11.21 Технологическая подготовка процесса изготовления детали Корпус 7102-0020/002 с использованием интегрированной среды САПР
Технологическая подготовка процесса изготовления детали Корпус 7102-0020/002 с использованием интегрированной среды САПР Факторы, влияющие на работоспособность механизма твердотопливного котла Стаханов
Факторы, влияющие на работоспособность механизма твердотопливного котла Стаханов Прокариоты
Прокариоты Проект благоустройства Томилинского лесопарка
Проект благоустройства Томилинского лесопарка Уголовный процесс
Уголовный процесс Печатающие устройства
Печатающие устройства Общественное сознание (11 класс)
Общественное сознание (11 класс) Software
Software Фим и волшебный чемодан
Фим и волшебный чемодан Презентация на тему Ядерная энергетика
Презентация на тему Ядерная энергетика Иконы «Воскресение Христово», «Вознесение Господне», «Сошествие Святого Духа». Христос Воскрес! В любви лучах Исчезнет скорби
Иконы «Воскресение Христово», «Вознесение Господне», «Сошествие Святого Духа». Христос Воскрес! В любви лучах Исчезнет скорби  Разработка Web-представительства для ЗАО «А-СЕРВИС»
Разработка Web-представительства для ЗАО «А-СЕРВИС» Выделение у животных
Выделение у животных Антимонопольное право Бобылева
Антимонопольное право Бобылева Рокоссовский Константин Константинович
Рокоссовский Константин Константинович Презентация на тему Сила трения покоя (7 класс)
Презентация на тему Сила трения покоя (7 класс) Классификация запасов, расчет промышленных запасов шахтного поля, потерь и извлечения
Классификация запасов, расчет промышленных запасов шахтного поля, потерь и извлечения Презентация на тему Сложение и вычитание с переходом через десяток
Презентация на тему Сложение и вычитание с переходом через десяток  Великая Отечественная Война(герои, награды)
Великая Отечественная Война(герои, награды) Социальные рискив современной России Евгений Юрьев – председатель Общественного совета Центрального федерального округа, соп
Социальные рискив современной России Евгений Юрьев – председатель Общественного совета Центрального федерального округа, соп ВКР: Международное экономическое сотрудничество стран в борьбе с нелегальными трансграничными финансовыми потоками
ВКР: Международное экономическое сотрудничество стран в борьбе с нелегальными трансграничными финансовыми потоками Образование Протоземли
Образование Протоземли Вводный урок алгебры в 7 классе «По страницам книги В.Левшина и Э.Александровой «Чёрная маска из Аль-Джебры». Методическая разрабо
Вводный урок алгебры в 7 классе «По страницам книги В.Левшина и Э.Александровой «Чёрная маска из Аль-Джебры». Методическая разрабо САША призинтация
САША призинтация Источники привлечения персонала
Источники привлечения персонала