- Системы управления БПЛА

Содержание
- 2. Оглавление Система управления Задача наземного программного комплекса Система управления на борту Оптическое позиционирование на местности в
- 3. Общая схема системы управления беспилотным летательным аппаратом БПЛА Программно- аппаратный наземный комплекс Постановка задачи Защищенная линия
- 4. Задача наземного программного комплекса Осмотр указанной цели Выполнение сложных задач на карте
- 5. Типовая схема системы управления на борту
- 6. Оптическое позиционирование БПЛА 1) Триангуляция Расстояние между камерами 3 км Диаметр зоны полета БПЛА 3 км
- 7. Оптическое позиционирование БПЛА 2) Камера высокого разрешения + лазерный дальномер Лазерный дальномер Камера, 5МП Расстояние 5км,
- 8. Оптическое позиционирование БПЛА Угол обзора: 2 град. Скорость: 4 град./сек Угловая точность: 7 мкРад На расстоянии
- 9. Оптическое позиционирование БПЛА Здесь картинка от Саши (как выцеливают ружьем)
- 10. Оптическое позиционирование БПЛА Система указания цели: относительная система координат Указание реперных точек производится лазерным дальномером После
- 11. Видео-аналитика на борту Сжатие и шифрование видео-потока Выделение резкой линии горизонта Контроль перемещений по камере Выделение
- 12. Видео-аналитика на борту Процессоры DaVinci от TI TMS320DM6467T - Ядра ARM9, DSP, Media-on-Chip Частота процессора 500МГц
- 14. Скачать презентацию
Слайд 2Оглавление
Система управления
Задача наземного программного комплекса
Система управления на борту
Оптическое позиционирование на местности в
Оглавление
Система управления
Задача наземного программного комплекса
Система управления на борту
Оптическое позиционирование на местности в
Слайд 3Общая схема системы управления беспилотным летательным аппаратом
БПЛА
Программно-
аппаратный
наземный комплекс
Постановка задачи
Защищенная линия связи
Общая схема системы управления беспилотным летательным аппаратом
БПЛА
Программно-
аппаратный
наземный комплекс
Постановка задачи
Защищенная линия связи

Слайд 4Задача наземного программного комплекса
Осмотр указанной цели
Выполнение сложных задач на карте
Задача наземного программного комплекса
Осмотр указанной цели
Выполнение сложных задач на карте
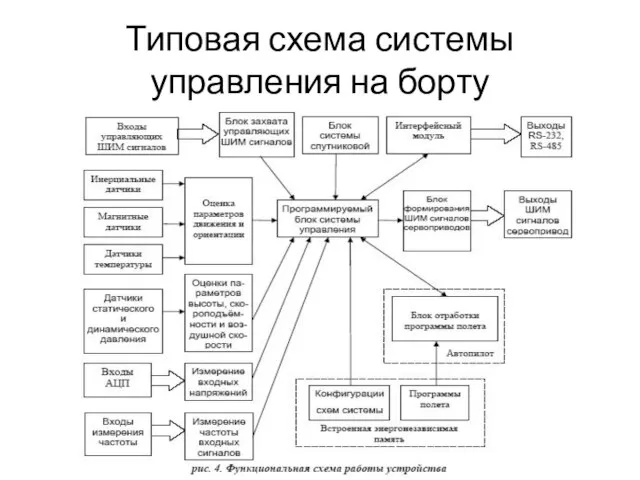
Слайд 5Типовая схема системы управления на борту
Типовая схема системы управления на борту
Слайд 6Оптическое позиционирование БПЛА
1) Триангуляция
Расстояние между камерами
3 км
Диаметр зоны полета БПЛА
3 км
Разрешение
Оптическое позиционирование БПЛА
1) Триангуляция
Расстояние между камерами
3 км
Диаметр зоны полета БПЛА
3 км
Разрешение

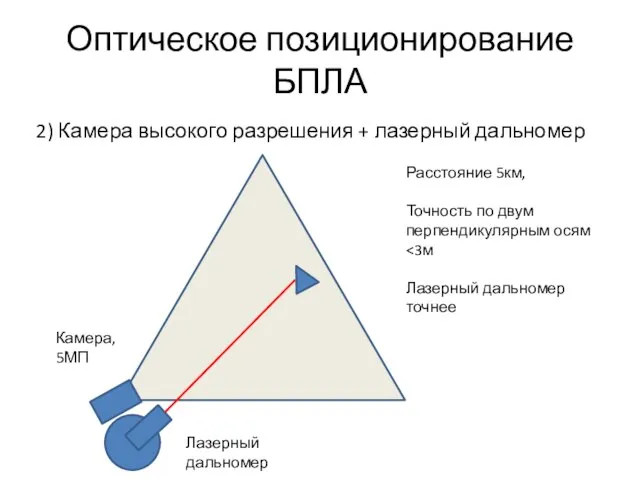
Слайд 7Оптическое позиционирование БПЛА
2) Камера высокого разрешения + лазерный дальномер
Лазерный дальномер
Камера, 5МП
Расстояние 5км,
Точность
Оптическое позиционирование БПЛА
2) Камера высокого разрешения + лазерный дальномер
Лазерный дальномер
Камера, 5МП
Расстояние 5км,
Точность
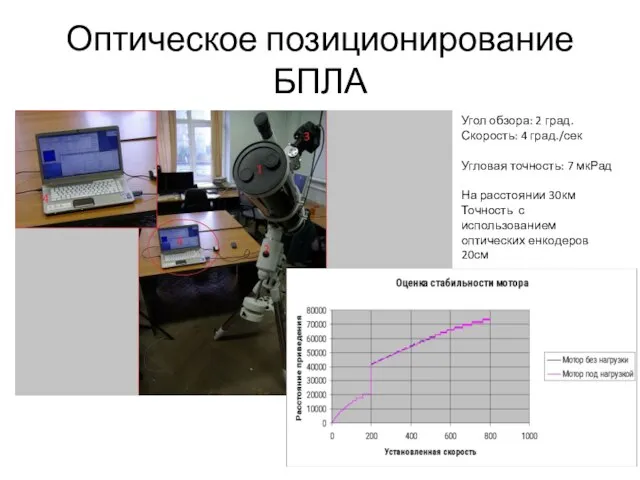
Слайд 8Оптическое позиционирование БПЛА
Угол обзора: 2 град.
Скорость: 4 град./сек
Угловая точность: 7 мкРад
На расстоянии
Оптическое позиционирование БПЛА
Угол обзора: 2 град.
Скорость: 4 град./сек
Угловая точность: 7 мкРад
На расстоянии
Слайд 9Оптическое позиционирование БПЛА
Здесь картинка от Саши (как выцеливают ружьем)
Оптическое позиционирование БПЛА
Здесь картинка от Саши (как выцеливают ружьем)
Слайд 10Оптическое позиционирование БПЛА
Система указания цели: относительная система координат
Указание реперных точек
производится лазерным
дальномером
После получения
Оптическое позиционирование БПЛА
Система указания цели: относительная система координат
Указание реперных точек
производится лазерным
дальномером
После получения

Слайд 11Видео-аналитика на борту
Сжатие и шифрование видео-потока
Выделение резкой линии горизонта
Контроль перемещений по
Видео-аналитика на борту
Сжатие и шифрование видео-потока
Выделение резкой линии горизонта
Контроль перемещений по
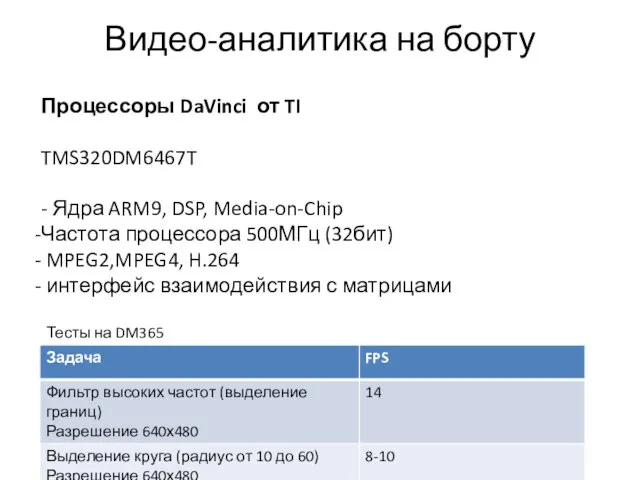
Слайд 12Видео-аналитика на борту
Процессоры DaVinci от TI
TMS320DM6467T
- Ядра ARM9, DSP, Media-on-Chip
Частота процессора 500МГц
Видео-аналитика на борту
Процессоры DaVinci от TI
TMS320DM6467T
- Ядра ARM9, DSP, Media-on-Chip
Частота процессора 500МГц
 Корона - горшок для орхидей
Корона - горшок для орхидей Партнёры Архангельской межрегиональной организации профсоюза работников народного образования и науки РФ
Партнёры Архангельской межрегиональной организации профсоюза работников народного образования и науки РФ Учет движения наличных денежных средств с использованием 1С: Бухгалтерия
Учет движения наличных денежных средств с использованием 1С: Бухгалтерия Традиционные общества в XIX – начале XX века
Традиционные общества в XIX – начале XX века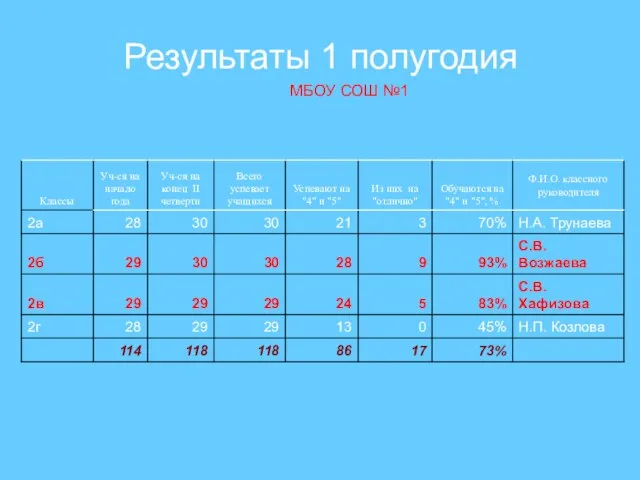 Результаты 1 полугодия МБОУ СОШ №1
Результаты 1 полугодия МБОУ СОШ №1 7кл_18-сабак_Тізбек_Презентация
7кл_18-сабак_Тізбек_Презентация Что было - что есть
Что было - что есть Партнерская программа
Партнерская программа Эдельвейс
Эдельвейс Магнитная составляющая электромагнитных волн
Магнитная составляющая электромагнитных волн Своя игра«Знаешь ли ты Ярославль?»
Своя игра«Знаешь ли ты Ярославль?» Презентация1
Презентация1 Формирование образного и логического мышления в процессе обучения литературе.
Формирование образного и логического мышления в процессе обучения литературе. Лекция 7. Духовно-нравственное воспитание и общие основы православной педагогики
Лекция 7. Духовно-нравственное воспитание и общие основы православной педагогики Отечественная война 1812 года
Отечественная война 1812 года Монферран Анри Луи Огюст Рикар
Монферран Анри Луи Огюст Рикар Открытая экоотчетность : требование времени
Открытая экоотчетность : требование времени Аварийно-спасательные работы
Аварийно-спасательные работы  Образование как целостный педагогический процесс
Образование как целостный педагогический процесс Презентация на тему Безопасный путь в школу
Презентация на тему Безопасный путь в школу ОРВИ на современном этапе
ОРВИ на современном этапе СКОРО СКАЗКА СКАЗЫВАЕТСЯ…
СКОРО СКАЗКА СКАЗЫВАЕТСЯ… АЛЕКСАНДР СУВОРОВ- «ГЕНЕРАЛ ВПЕРЁД»
АЛЕКСАНДР СУВОРОВ- «ГЕНЕРАЛ ВПЕРЁД» Транспорт России
Транспорт России Анализ нормативно – правовых актов: Азербайджан
Анализ нормативно – правовых актов: Азербайджан Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18
Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18 Общие должностные и специальные обязанности военнослужащих
Общие должностные и специальные обязанности военнослужащих Сказки, мифы, легенды, былины
Сказки, мифы, легенды, былины