- Соревнования в Робототехнике

Содержание
- 2. Соревнования, зачем? Популяризация Робототехники Привлечение внимания к различным задачам робототехники, и как следствие, развитие и продвижение
- 3. DARPA Grand Challenge DARPA Grand Challenge — соревнования автомобилей-роботов, финансируемые агентством передовых оборонных разработок Пентагона (DARPA).
- 4. RoboCup RoboCup is an international robotics competition founded in 1993. The aim is to develop autonomous
- 5. EuroBot Открытый чемпионат автономных мобильных роботов, созданных молодёжными командами со всего мира. Соревнования призваны привлечь внимание
- 6. Robot Sumo Robot-sumo (robo-sumo) is a sport in which two robots attempt to push each other
- 7. Other Competitions Существует множество других соревнований, в том числе: Rescue robots – соревнования роботов спасателей Maze-solver
- 8. План :) Огранизовываем Robotics Team (название? эмблема?) Делаем роботов, участвуем в соревнованиях, побеждаем! ;) Роботы: Базовая
- 9. Механика Каркас, несущая конструкция, структура, корпус Моторы, редукторы, двигательная система Манипуляторы, устройства для специальных задач, например:
- 10. Электроника «Разум» - одноплатный (single board) компьютер (SBC: платформы ARM, x86) Датчики и сенсоры для получения
- 11. Программное обеспечение ПО для встраиваемых систем (embedded), настольных (desktop), серверов (server/network/distributed) Основные задачи: control systems, AI,
- 12. Алгоритмы и управление high-level - стратегический уровень и low-level - тактический уровень Искусственный интеллект (AI) -
- 13. А так же - misc. stuff Software & Web http://robotics.org.ua/ - web-portal, wiki-system, etc Hardware: Источники
- 14. Ссылки Список различных соревнований: http://robots.net/rcfaq.html http://www.darpa.mil/grandchallenge/ РобоФутбол: http://robocup.org/ ЕвроБот: http://www.eurobot.ru/ и http://www.eurobot.org/ http://www.robosport.ru/ http://www.myrobot.ru/ http://www.roboclub.ru/, http://roboforum.ru/http://roboforum.ru/,
- 15. Вопросы, коментарии? Контакты: Александр Саввутин [email protected] +38 050 61 57 386
- 17. Скачать презентацию
Слайд 2Соревнования, зачем?
Популяризация Робототехники
Привлечение внимания к различным задачам робототехники,
и как следствие, развитие и
Соревнования, зачем?
Популяризация Робототехники
Привлечение внимания к различным задачам робототехники,
и как следствие, развитие и
Слайд 3DARPA Grand Challenge
DARPA Grand Challenge — соревнования автомобилей-роботов, финансируемые агентством передовых оборонных разработок
DARPA Grand Challenge
DARPA Grand Challenge — соревнования автомобилей-роботов, финансируемые агентством передовых оборонных разработок

Слайд 4RoboCup
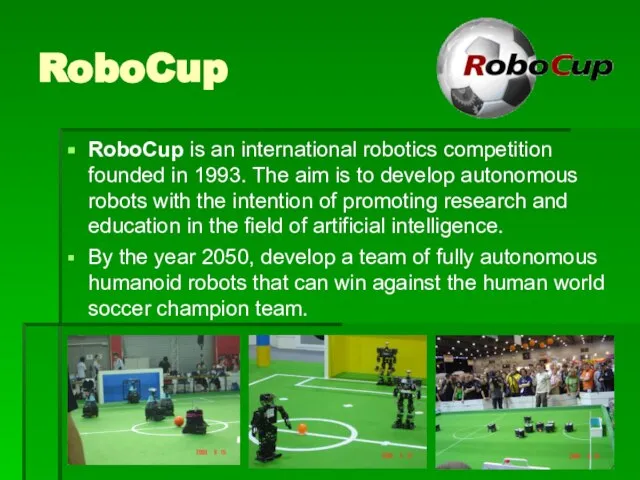
RoboCup is an international robotics competition founded in 1993. The aim is
RoboCup
RoboCup is an international robotics competition founded in 1993. The aim is
Слайд 5EuroBot
Открытый чемпионат автономных мобильных роботов, созданных молодёжными командами со всего мира. Соревнования
EuroBot
Открытый чемпионат автономных мобильных роботов, созданных молодёжными командами со всего мира. Соревнования

Слайд 6Robot Sumo
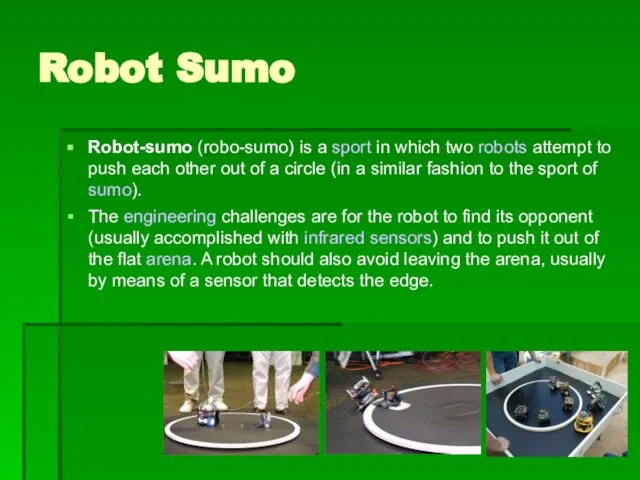
Robot-sumo (robo-sumo) is a sport in which two robots attempt to
Robot Sumo
Robot-sumo (robo-sumo) is a sport in which two robots attempt to
Слайд 7Other Competitions
Существует множество других соревнований, в том числе:
Rescue robots – соревнования роботов
Other Competitions
Существует множество других соревнований, в том числе:
Rescue robots – соревнования роботов

Слайд 8План :)
Огранизовываем Robotics Team (название? эмблема?)
Делаем роботов, участвуем в соревнованиях, побеждаем! ;)
Роботы:
Базовая
План :)
Огранизовываем Robotics Team (название? эмблема?)
Делаем роботов, участвуем в соревнованиях, побеждаем! ;)
Роботы:
Базовая
Слайд 9Механика
Каркас, несущая конструкция, структура, корпус
Моторы, редукторы, двигательная система
Манипуляторы, устройства для специальных задач,
Механика
Каркас, несущая конструкция, структура, корпус
Моторы, редукторы, двигательная система
Манипуляторы, устройства для специальных задач,
Слайд 10Электроника
«Разум» - одноплатный (single board) компьютер
(SBC: платформы ARM, x86)
Датчики и сенсоры для
Электроника
«Разум» - одноплатный (single board) компьютер
(SBC: платформы ARM, x86)
Датчики и сенсоры для
Слайд 11Программное обеспечение
ПО для встраиваемых систем (embedded), настольных (desktop), серверов (server/network/distributed)
Основные задачи: control
Программное обеспечение
ПО для встраиваемых систем (embedded), настольных (desktop), серверов (server/network/distributed)
Основные задачи: control
Слайд 12Алгоритмы и управление
high-level - стратегический уровень
и low-level - тактический уровень
Искусственный интеллект (AI)
Алгоритмы и управление
high-level - стратегический уровень
и low-level - тактический уровень
Искусственный интеллект (AI)
Слайд 13А так же - misc. stuff
Software & Web
http://robotics.org.ua/ - web-portal, wiki-system, etc
Hardware:
Источники
А так же - misc. stuff
Software & Web
http://robotics.org.ua/ - web-portal, wiki-system, etc
Hardware:
Источники
Слайд 14Ссылки
Список различных соревнований: http://robots.net/rcfaq.html
http://www.darpa.mil/grandchallenge/
РобоФутбол: http://robocup.org/
ЕвроБот: http://www.eurobot.ru/ и http://www.eurobot.org/
http://www.robosport.ru/
http://www.myrobot.ru/
http://www.roboclub.ru/, http://roboforum.ru/http://roboforum.ru/, http://robo.com.ua/
Ссылки
Список различных соревнований: http://robots.net/rcfaq.html
http://www.darpa.mil/grandchallenge/
РобоФутбол: http://robocup.org/
ЕвроБот: http://www.eurobot.ru/ и http://www.eurobot.org/
http://www.robosport.ru/
http://www.myrobot.ru/
http://www.roboclub.ru/, http://roboforum.ru/http://roboforum.ru/, http://robo.com.ua/
Слайд 15Вопросы, коментарии?
Контакты:
Александр Саввутин
[email protected]
+38 050 61 57 386
Вопросы, коментарии?
Контакты:
Александр Саввутин
[email protected]
+38 050 61 57 386
 Стартап By Mikokit. Бизнес-модель
Стартап By Mikokit. Бизнес-модель Закон Архимеда
Закон Архимеда Программа “Процент с продаж”. Предложение по социальному маркетигу
Программа “Процент с продаж”. Предложение по социальному маркетигу Режим дня
Режим дня  Звенящая нежность
Звенящая нежность Обобщенная трудовая функция
Обобщенная трудовая функция Noize Mc Последний альбом
Noize Mc Последний альбом Есть ли жизнь в Солнечной системе?
Есть ли жизнь в Солнечной системе? «Загадочный Гоголь»
«Загадочный Гоголь» Исследование «Экология д.Новосёлово»
Исследование «Экология д.Новосёлово» Волшебное путешествие к мечте
Волшебное путешествие к мечте учим мемберов стрей кидс!
учим мемберов стрей кидс! Презентация на тему Файл Файловая система
Презентация на тему Файл Файловая система  Механическое движение 9 класс
Механическое движение 9 класс Клавиатура
Клавиатура Оценка физического развития и функциональной подготовленности студента. Шаблон
Оценка физического развития и функциональной подготовленности студента. Шаблон Презентация на тему Что изучает физика 7 класс
Презентация на тему Что изучает физика 7 класс Утренняя зарядка. Заряжайся вместе с нами!
Утренняя зарядка. Заряжайся вместе с нами! Презентация на тему Очистка сточных вод
Презентация на тему Очистка сточных вод  Импрессионизм в музыке и живописи
Импрессионизм в музыке и живописи Лес Карельского перешейка в гостинично-коттеджный комплекс Коробицыно-каскад
Лес Карельского перешейка в гостинично-коттеджный комплекс Коробицыно-каскад Организация и вооружение подразделений Сухопутных войск. Виды вооруженных сил, рода войск
Организация и вооружение подразделений Сухопутных войск. Виды вооруженных сил, рода войск Внеурочная деятельность школьников
Внеурочная деятельность школьников Транспортная логистика. Грузовые тарифы
Транспортная логистика. Грузовые тарифы Click to edit Master title style Click to edit Master subtitle style
Click to edit Master title style Click to edit Master subtitle style  «Не» с существительными
«Не» с существительными Методическое объединение педагогов дополнительного образования и учителей художественно-эстетического цикла
Методическое объединение педагогов дополнительного образования и учителей художественно-эстетического цикла Терешкова Валентина Владимировна
Терешкова Валентина Владимировна