- Статически определимые плоские комбинированные системы типа шпренгельных балок, рам и арок

Содержание
- 2. Комбинированной называется геометрически неизменяемая система, состоящая из различных по характеру своей работы частей, совместно участвующих в
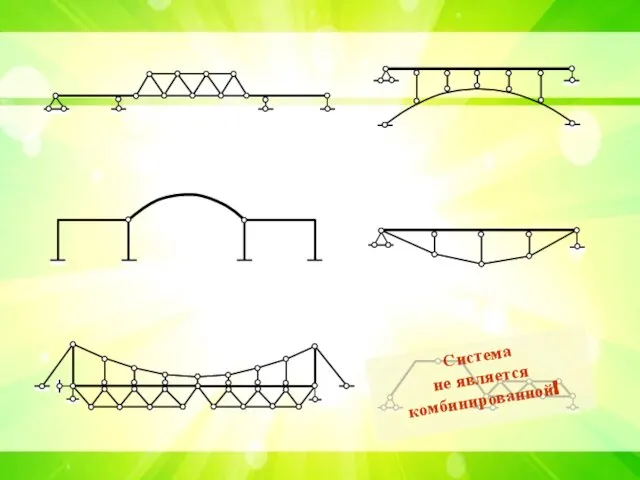
- 3. Система не является комбинированной!
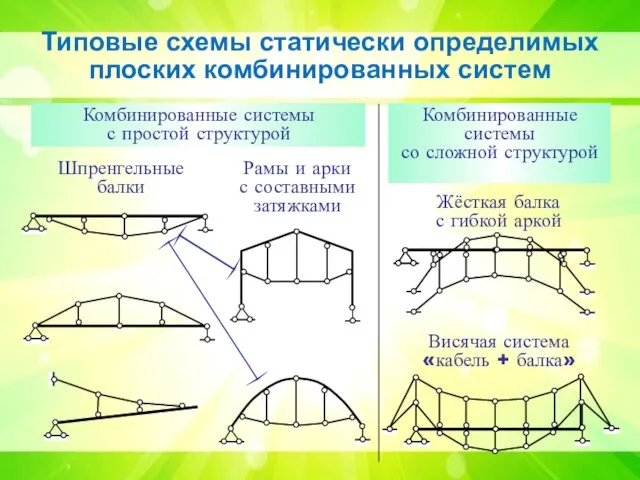
- 4. Типовые схемы статически определимых плоских комбинированных систем Шпренгельные балки Рамы и арки с составными затяжками Комбинированные
- 5. А В С 1 2 3 4 Структурный анализ А В С 1 2 3 4
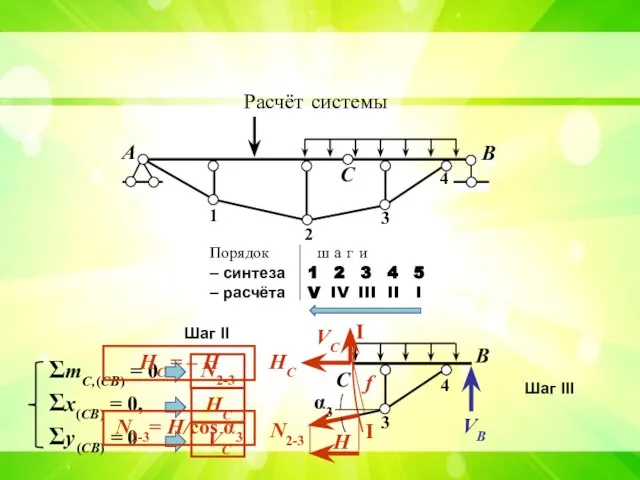
- 6. А В С 1 2 3 4 Расчёт системы Порядок ш а г и – синтеза
- 7. А В С 1 2 3 4 Расчёт системы Порядок ш а г и – синтеза
- 8. А В С 1 2 3 4 Расчёт системы Порядок ш а г и – синтеза
- 9. Расчёт комбинированных систем типа шпренгельных балок, рам и арок А В С 1 2 3 4
- 10. А В С 1 2 3 4 Расчёт системы II II А В С 4 II
- 11. Расчёт комбинированных систем типа «жёсткая балка с гибкой аркой» А В С i 2 3 n
- 12. А В С Кинематический анализ i* 2* 3* i 2 3 n 0 Направление удалённой связи
- 13. А В С i 2 3 n 0 Расчёт системы VА VВ R0 Rn HА H
- 14. i Расчёт системы αi αi+1 Ni-1, i Ni, i+1 N i y Алгоритм расчёта Равновесие узлов
- 15. А В С i 2 3 n 0 Расчёт системы VА VВ R0 Rn HА H
- 16. А В С Расчёт системы VА VВ HА Алгоритм расчёта Равновесие узлов шарнирной цепи ( i
- 17. А В С Расчёт системы VА VВ HА Вариант: непосредственное использование принципа Лагранжа Wext + Wint
- 18. А В Расчёт системы VА VВ HА Вариант: непосредственное использование принципа Лагранжа Wext + Wint =
- 19. Расчет системы H ΣmC,(CB) = 0, Σy = 0, Σx = 0 VB VA HA Расчёт
- 20. А В С i 2 3 n 0 Аналогия с трёхшарнирной аркой О г р а
- 21. А/ B/ C/ Аналогия с трёхшарнирной аркой х θ(х) Qа (x) Mа (x) А В С
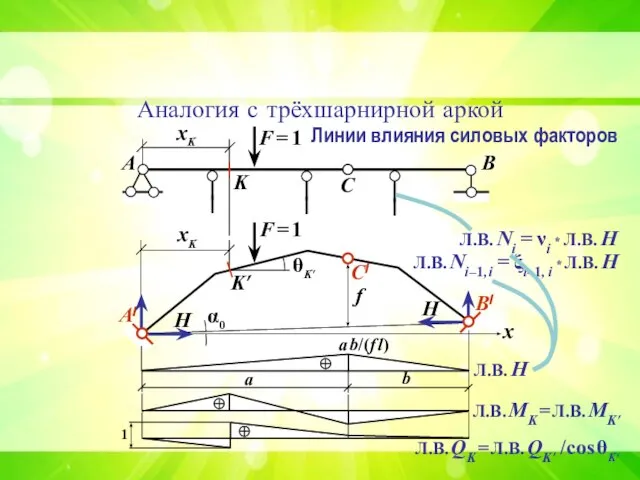
- 22. А/ B/ C/ Аналогия с трёхшарнирной аркой θK’ А В С хK х α0 H H
- 24. Скачать презентацию
Слайд 2Комбинированной называется геометрически неизменяемая система, состоящая из различных
по характеру своей работы
по характеру своей работы
Слайд 3Система
не является
комбинированной!
Система
не является
комбинированной!
Слайд 4Типовые схемы статически определимых плоских комбинированных систем
Шпренгельные
балки
Рамы и арки
с составными
затяжками
Комбинированные системы
Типовые схемы статически определимых плоских комбинированных систем
Шпренгельные
балки
Рамы и арки
с составными
затяжками
Комбинированные системы
Слайд 5А
В
С
1
2
3
4
Структурный анализ
А
В
С
1
2
3
4
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
1
Шаг 1
2
Шаг 2
3
4
Шаг 3
С
Шаг
А
В
С
1
2
3
4
Структурный анализ
А
В
С
1
2
3
4
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
1
Шаг 1
2
Шаг 2
3
4
Шаг 3
С
Шаг

Слайд 6А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
Слайд 7А
В
С
1
2
3
4
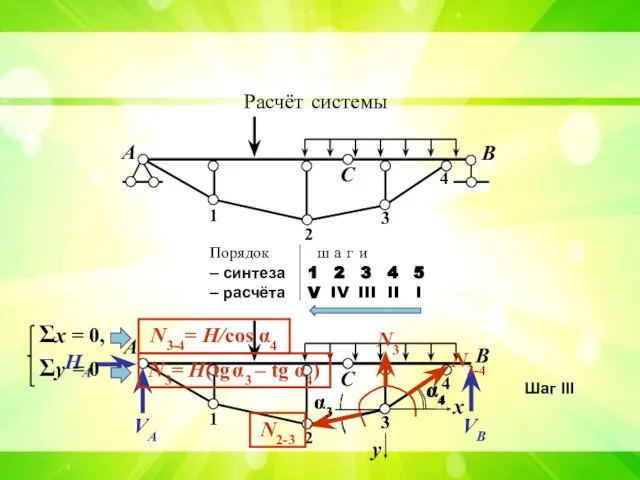
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
Слайд 8А
В
С
1
2
3
4
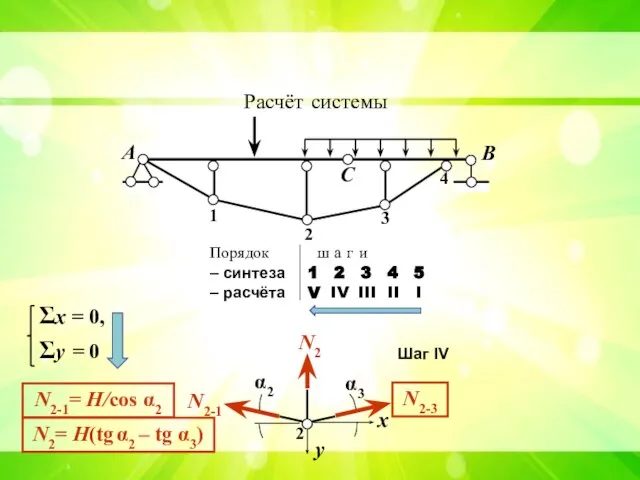
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г и
– синтеза 1 2 3 4 5
–
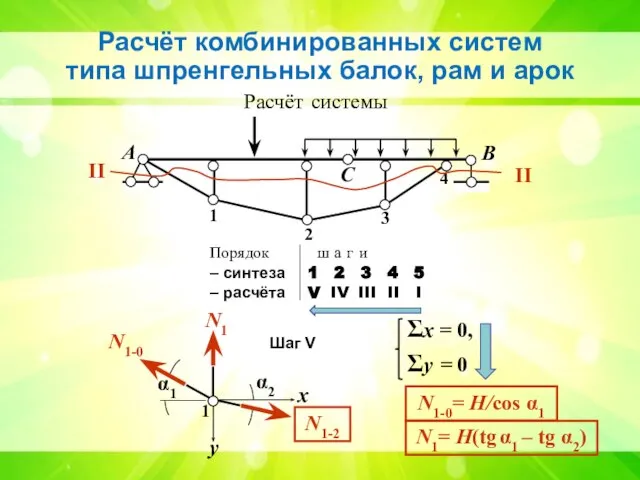
Слайд 9Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г
Расчёт комбинированных систем
типа шпренгельных балок, рам и арок
А
В
С
1
2
3
4
Расчёт системы
Порядок ш а г
Слайд 10А
В
С
1
2
3
4
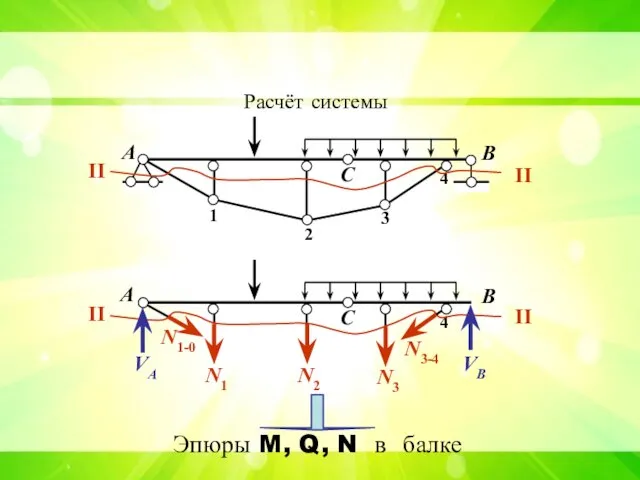
Расчёт системы
II
II
А
В
С
4
II
II
VА
VB
N1
N2
N3
N1-0
N3-4
Эпюры M, Q, N в балке
А
В
С
1
2
3
4
Расчёт системы
II
II
А
В
С
4
II
II
VА
VB
N1
N2
N3
N1-0
N3-4
Эпюры M, Q, N в балке
Слайд 11Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
?
Кинематический анализ
i*
2*
3*
W = 0
Направление
удалённой связи
Расчёт комбинированных систем
типа «жёсткая балка с гибкой аркой»
А
В
С
i
2
3
n
0
?
Кинематический анализ
i*
2*
3*
W = 0
Направление
удалённой связи

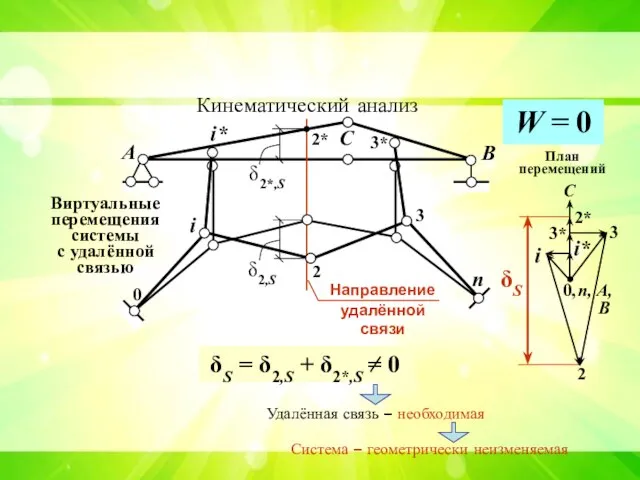
Слайд 12А
В
С
Кинематический анализ
i*
2*
3*
i
2
3
n
0
Направление
удалённой связи
i*
i
3*
3
2*
2
С
W = 0
0, n, A,
B
План
перемещений
Виртуальные
перемещения
системы
с удалённой
связью
δ2*,S
δ2,S
δS
δS
А
В
С
Кинематический анализ
i*
2*
3*
i
2
3
n
0
Направление
удалённой связи
i*
i
3*
3
2*
2
С
W = 0
0, n, A,
B
План
перемещений
Виртуальные
перемещения
системы
с удалённой
связью
δ2*,S
δ2,S
δS
δS
Слайд 13А
В
С
i
2
3
n
0
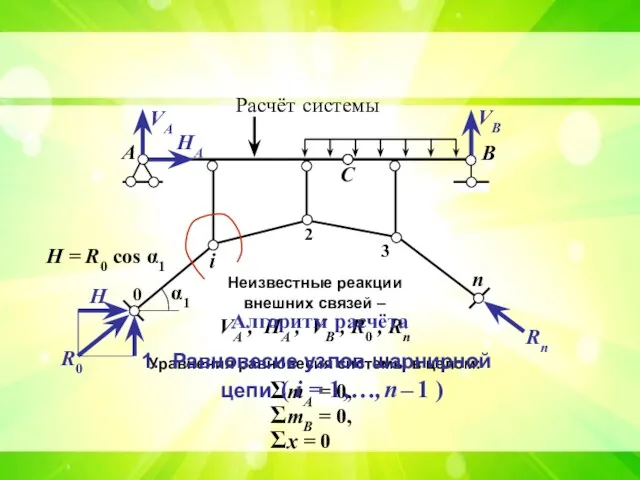
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0 cos α1
Неизвестные реакции
внешних связей –
VA , HA
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0 cos α1
Неизвестные реакции
внешних связей –
VA , HA
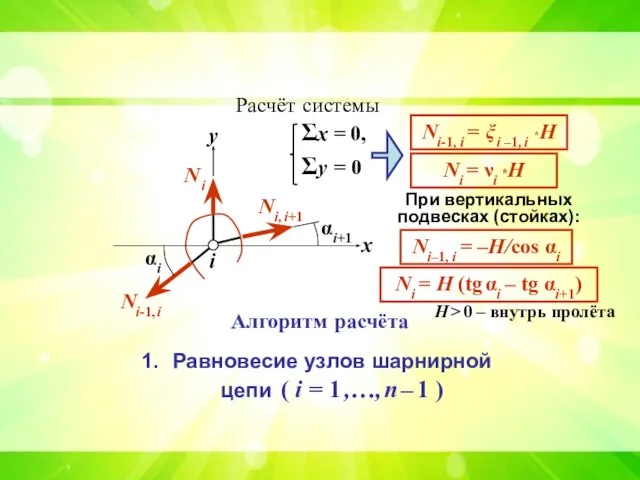
Слайд 14i
Расчёт системы
αi
αi+1
Ni-1, i
Ni, i+1
N i
y
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i =
i
Расчёт системы
αi
αi+1
Ni-1, i
Ni, i+1
N i
y
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i =
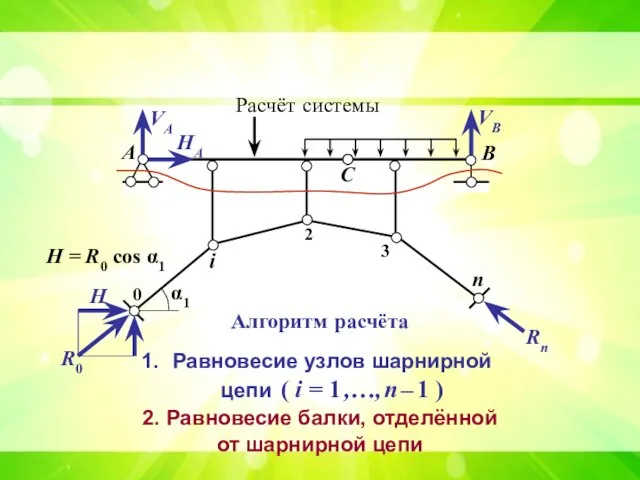
Слайд 15А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0 cos α1
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i
А
В
С
i
2
3
n
0
Расчёт системы
VА
VВ
R0
Rn
HА
H
α1
H = R0 cos α1
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i
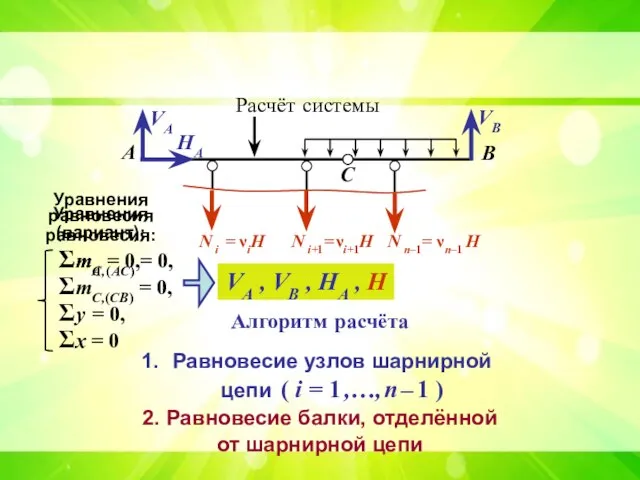
Слайд 16А
В
С
Расчёт системы
VА
VВ
HА
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i = 1 ,…, n
А
В
С
Расчёт системы
VА
VВ
HА
Алгоритм расчёта
Равновесие узлов шарнирной цепи ( i = 1 ,…, n
Слайд 17А
В
С
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование принципа Лагранжа
Wext + Wint = 0
N i =
А
В
С
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование принципа Лагранжа
Wext + Wint = 0
N i =
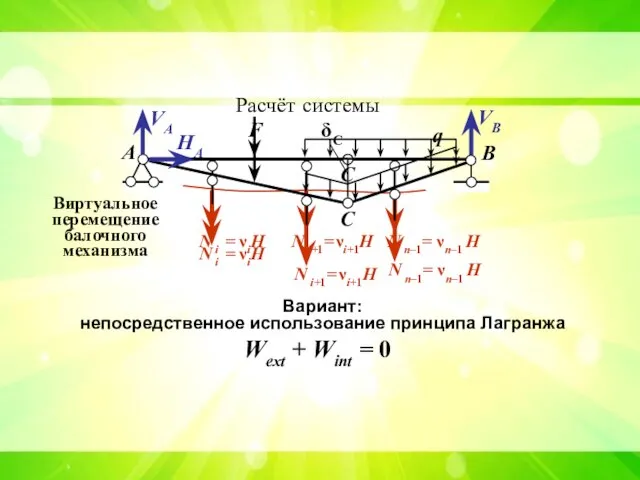
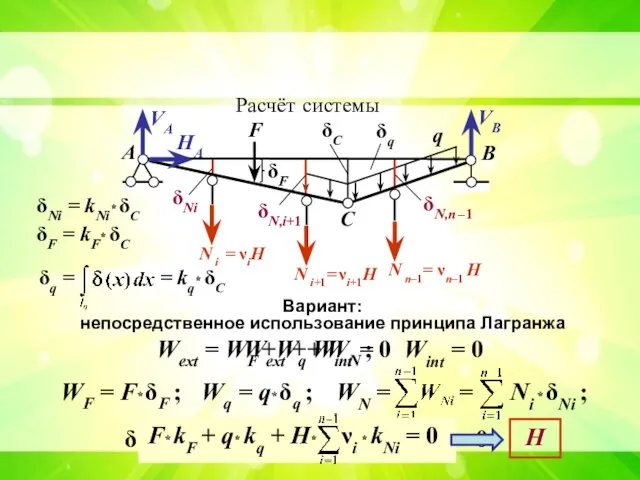
Слайд 18А
В
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование принципа Лагранжа
Wext + Wint = 0
F
С
q
δC
δF
δq
δNi
δN,i+1
δN,n – 1
А
В
Расчёт системы
VА
VВ
HА
Вариант:
непосредственное использование принципа Лагранжа
Wext + Wint = 0
F
С
q
δC
δF
δq
δNi
δN,i+1
δN,n – 1
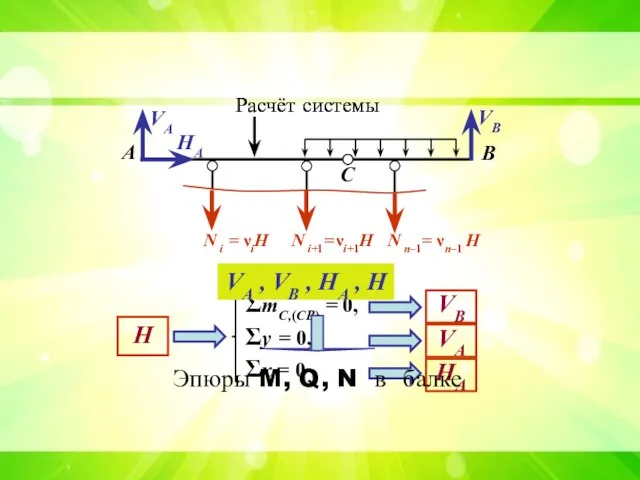
Слайд 19Расчет системы
H
ΣmC,(CB) = 0,
Σy = 0,
Σx = 0
VB
VA
HA
Расчёт системы
N i+1= νi+1H
N n–1=
Расчет системы
H
ΣmC,(CB) = 0,
Σy = 0,
Σx = 0
VB
VA
HA
Расчёт системы
N i+1= νi+1H
N n–1=
Слайд 20А
В
С
i
2
3
n
0
Аналогия с трёхшарнирной аркой
О г р а н и ч е н
А
В
С
i
2
3
n
0
Аналогия с трёхшарнирной аркой
О г р а н и ч е н

Слайд 21А/
B/
C/
Аналогия с трёхшарнирной аркой
х
θ(х)
Qа (x)
Mа (x)
А
В
С
х
Внутренние силовые факторы
в сечении балки комбинированной
А/
B/
C/
Аналогия с трёхшарнирной аркой
х
θ(х)
Qа (x)
Mа (x)
А
В
С
х
Внутренние силовые факторы
в сечении балки комбинированной

Слайд 22А/
B/
C/
Аналогия с трёхшарнирной аркой
θK’
А
В
С
хK
х
α0
H
H
f
Л.В. Ni = νi * Л.В. H
Л.В. Ni–1,
А/
B/
C/
Аналогия с трёхшарнирной аркой
θK’
А
В
С
хK
х
α0
H
H
f
Л.В. Ni = νi * Л.В. H
Л.В. Ni–1,
 Сложение и вычитание смешанных дробей
Сложение и вычитание смешанных дробей Организационная культура
Организационная культура Презентация на тему Семья в современном обществе. Законодательство о семье
Презентация на тему Семья в современном обществе. Законодательство о семье Физика автомобилей
Физика автомобилей Ядерный реактор
Ядерный реактор Тензионные состояния
Тензионные состояния Создание первого велосипеда
Создание первого велосипеда Фотоальбом. ПТУ №38 м. Жашкова
Фотоальбом. ПТУ №38 м. Жашкова ДЕТИ НА ДОРОГАХпрограмма Российского Фонда Мира
ДЕТИ НА ДОРОГАХпрограмма Российского Фонда Мира Life Club - возможность заработка
Life Club - возможность заработка Отряд Акулы
Отряд Акулы Оценка ущерба добытых общераспространенных полезных ископаемых на землях не пригодных для данного вида использования
Оценка ущерба добытых общераспространенных полезных ископаемых на землях не пригодных для данного вида использования Презентация на тему Кошки и собаки
Презентация на тему Кошки и собаки  Презентация на тему Классы неорганических веществ
Презентация на тему Классы неорганических веществ Механическое движение в живой и неживой природе
Механическое движение в живой и неживой природе Street dancе
Street dancе Презентация на тему Семейное право
Презентация на тему Семейное право ДОКАЗАТЕЛЬСТВА ЭВОЛЮЦИИ ОРГАНИЧЕСКОГО МИРА
ДОКАЗАТЕЛЬСТВА ЭВОЛЮЦИИ ОРГАНИЧЕСКОГО МИРА Все мы с вами сладкоежки Любим торты и орешки Нельзя сладким увлекаться Можно без зубов остаться.
Все мы с вами сладкоежки Любим торты и орешки Нельзя сладким увлекаться Можно без зубов остаться. Глоссарий по основным понятиям внутреннего контроля
Глоссарий по основным понятиям внутреннего контроля Мои домашние животніе
Мои домашние животніе Презентация на тему Отгадай, кто спрятался
Презентация на тему Отгадай, кто спрятался Инструмент парикмахера
Инструмент парикмахера Интерес к предмету через исследовательскую деятельность
Интерес к предмету через исследовательскую деятельность Астрология. Астропрогноз
Астрология. Астропрогноз Памятники природы Красноярского края
Памятники природы Красноярского края Газетоплетение
Газетоплетение Темы и мотивы лирики А.С.Пушкина
Темы и мотивы лирики А.С.Пушкина