- Танковая навигационная аппаратура

Содержание
- 2. Учебные вопросы: Основные определения. 2. Принцип работы. 3. Общие сведения о дальномерах.
- 3. Танковая навигационная аппаратура предназначена для повышения эффективности действий частей и подразделений Сухопутных войск при решении различных
- 4. Принципиальная схема навигационной аппаратуры
- 5. Навигационная аппаратура состоит из навигационных приборов и вспомогательных приборов и устройств. В войсках применяются следующие навигационные
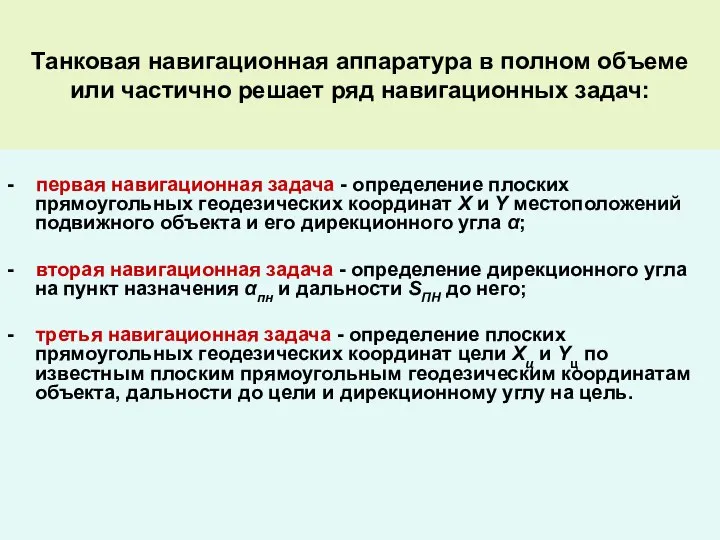
- 6. Танковая навигационная аппаратура в полном объеме или частично решает ряд навигационных задач: - первая навигационная задача
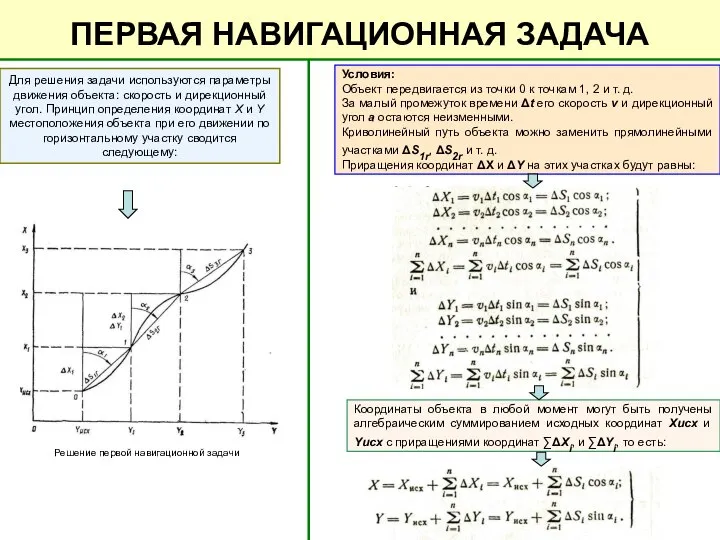
- 7. ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА Решение первой навигационной задачи Для решения задачи используются параметры движения объекта: скорость и
- 8. Из приведенных формул следует, что для решения первой навигационной задачи необходимо: непрерывно измерять скорость v движения
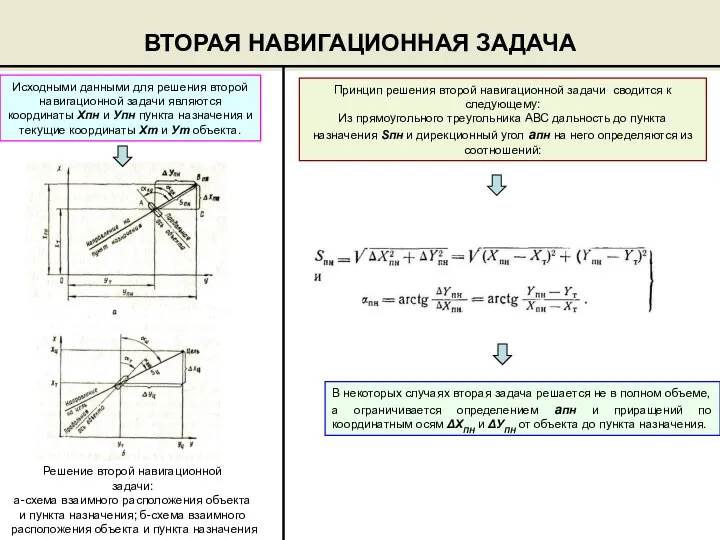
- 9. ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА Исходными данными для решения второй навигационной задачи являются координаты Хпн и Упн пункта
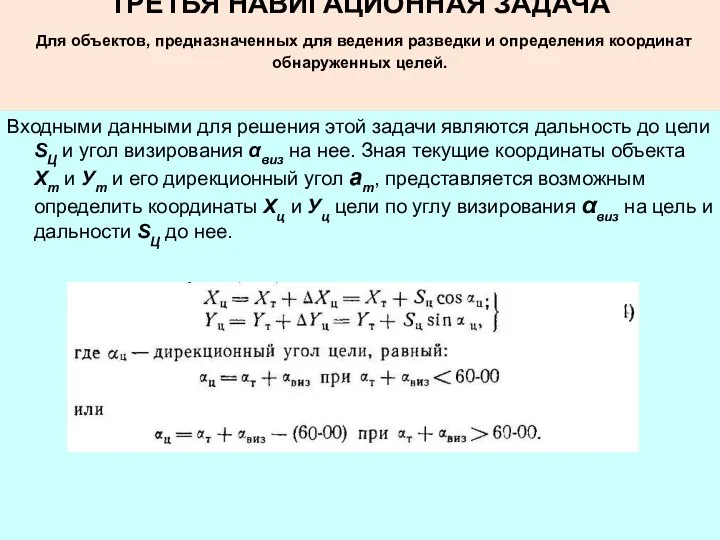
- 10. ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА Для объектов, предназначенных для ведения разведки и определения координат обнаруженных целей. Входными данными
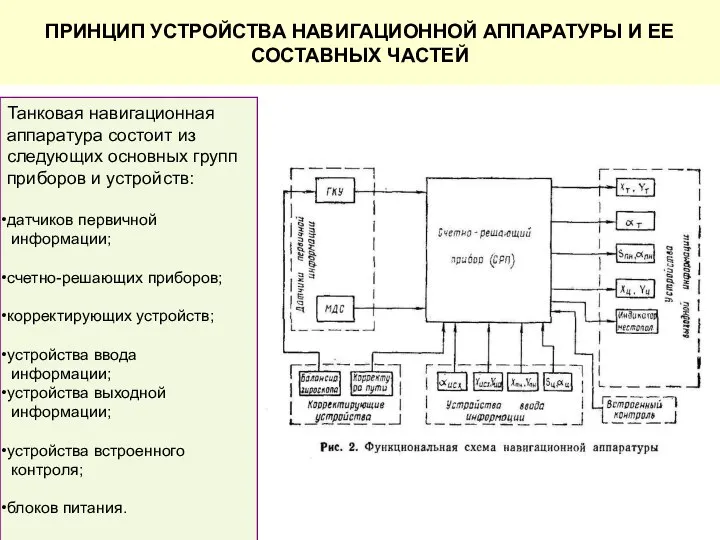
- 11. ПРИНЦИП УСТРОЙСТВА НАВИГАЦИОННОЙ АППАРАТУРЫ И ЕЕ СОСТАВНЫХ ЧАСТЕЙ Танковая навигационная аппаратура состоит из следующих основных групп
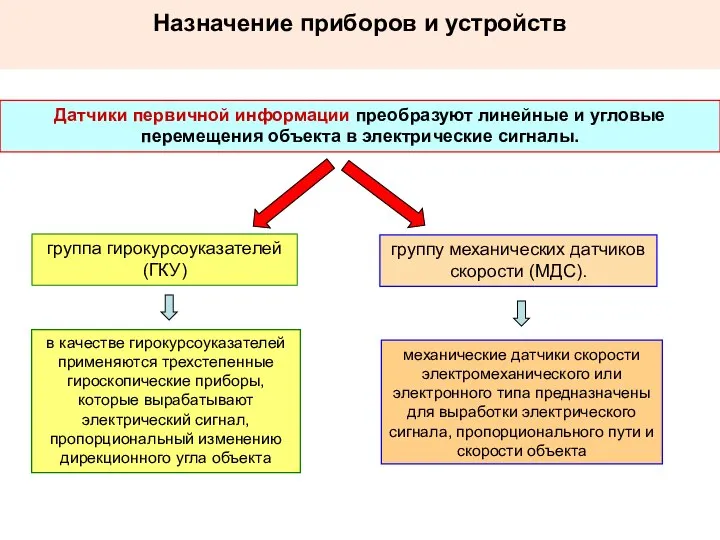
- 12. Назначение приборов и устройств механические датчики скорости электромеханического или электронного типа предназначены для выработки электрического сигнала,
- 13. Назначение приборов и устройств (продолжение) Счетно-решающие приборы предназначены для обработки сигналов датчиков первичной информации по заданным
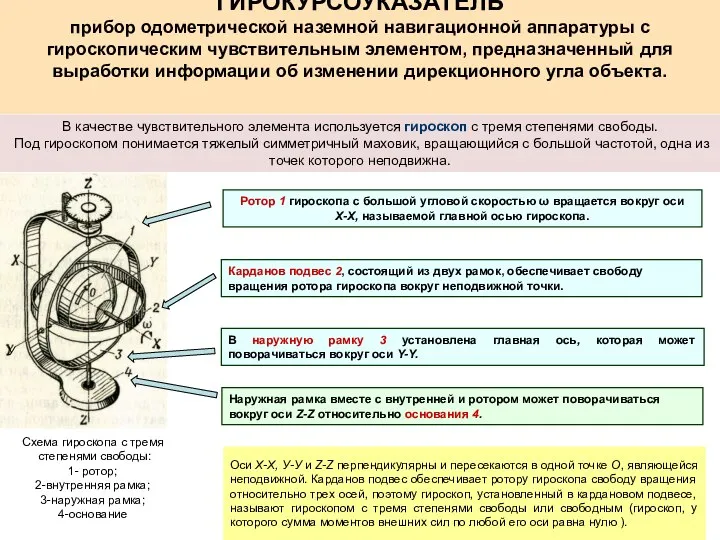
- 14. ГИРОКУРСОУКАЗАТЕЛЬ прибор одометрической наземной навигационной аппаратуры с гироскопическим чувствительным элементом, предназначенный для выработки информации об изменении
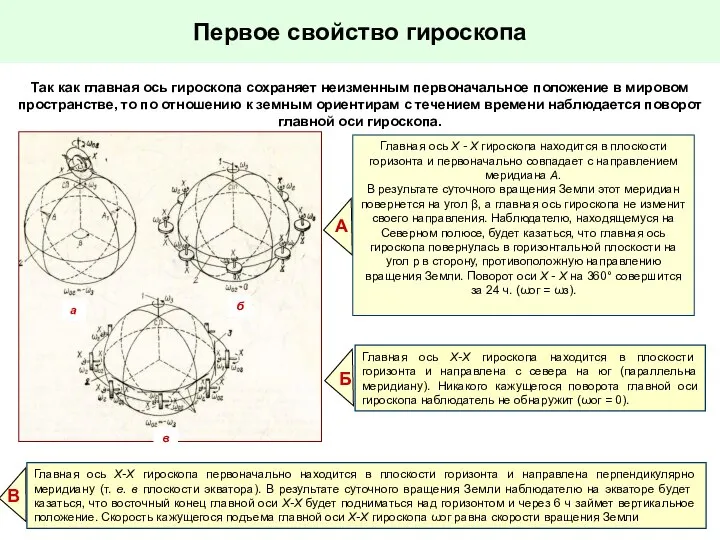
- 15. Первое свойство гироскопа Так как главная ось гироскопа сохраняет неизменным первоначальное положение в мировом пространстве, то
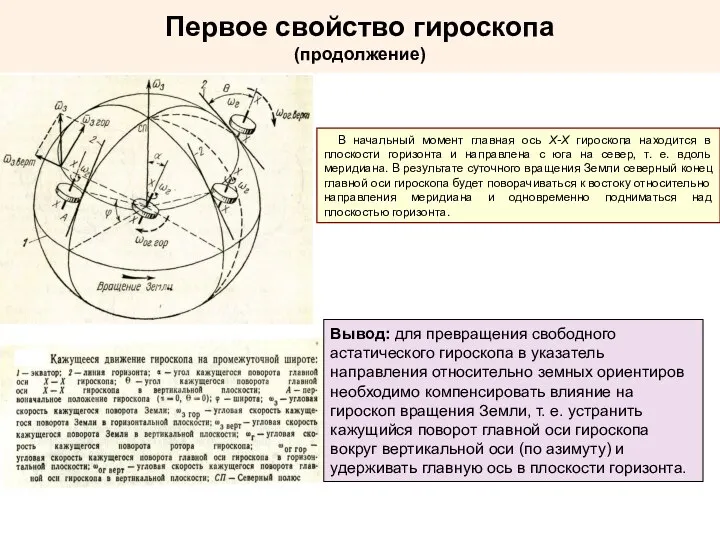
- 16. Первое свойство гироскопа (продолжение) В начальный момент главная ось X-X гироскопа находится в плоскости горизонта и
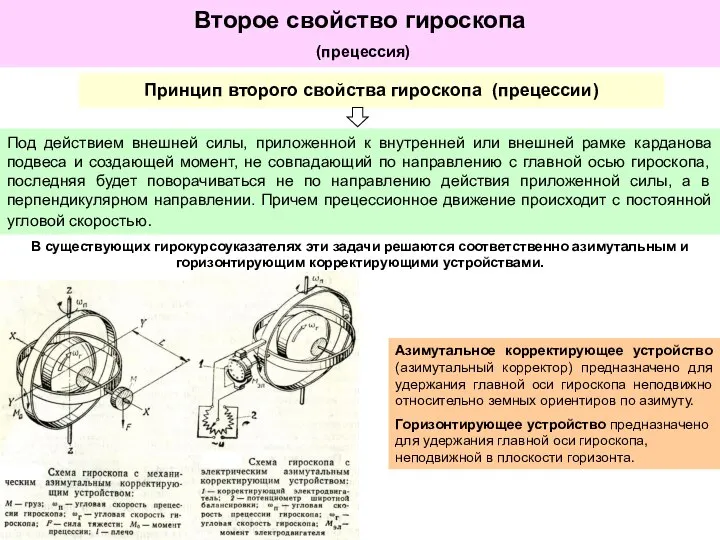
- 17. Второе свойство гироскопа (прецессия) Принцип второго свойства гироскопа (прецессии) Под действием внешней силы, приложенной к внутренней
- 18. СЧЕТНО-РЕШАЮЩИЕ ПРИБОРЫ Счетно-решающий прибор должен непрерывно решать следующие задачи: - вычислять тригонометрические функции соsα и sinα
- 20. Скачать презентацию
Слайд 3
Танковая навигационная аппаратура предназначена для повышения эффективности действий частей и подразделений Сухопутных
Танковая навигационная аппаратура предназначена для повышения эффективности действий частей и подразделений Сухопутных
Слайд 4Принципиальная схема навигационной аппаратуры

Слайд 5Навигационная аппаратура состоит из навигационных приборов и вспомогательных приборов и устройств.
В
Навигационная аппаратура состоит из навигационных приборов и вспомогательных приборов и устройств.
В
Слайд 6Танковая навигационная аппаратура в полном объеме или частично решает ряд навигационных задач:
-
Танковая навигационная аппаратура в полном объеме или частично решает ряд навигационных задач:
-
Слайд 7ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Решение первой навигационной задачи
Для решения задачи используются параметры
ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Решение первой навигационной задачи
Для решения задачи используются параметры
Слайд 8Из приведенных формул следует, что для решения первой навигационной задачи необходимо:
непрерывно измерять
Из приведенных формул следует, что для решения первой навигационной задачи необходимо:
непрерывно измерять
Слайд 9ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Исходными данными для решения второй навигационной задачи являются координаты
ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Исходными данными для решения второй навигационной задачи являются координаты
Слайд 10ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА
Для объектов, предназначенных для ведения разведки и определения координат
ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА Для объектов, предназначенных для ведения разведки и определения координат
Слайд 11ПРИНЦИП УСТРОЙСТВА НАВИГАЦИОННОЙ АППАРАТУРЫ И ЕЕ СОСТАВНЫХ ЧАСТЕЙ
Танковая навигационная аппаратура состоит из
ПРИНЦИП УСТРОЙСТВА НАВИГАЦИОННОЙ АППАРАТУРЫ И ЕЕ СОСТАВНЫХ ЧАСТЕЙ
Танковая навигационная аппаратура состоит из
Слайд 12
Назначение приборов и устройств
механические датчики скорости электромеханического или электронного типа предназначены для
Назначение приборов и устройств
механические датчики скорости электромеханического или электронного типа предназначены для
Слайд 13Назначение приборов и устройств
(продолжение)
Счетно-решающие приборы предназначены для обработки сигналов датчиков первичной информации
Назначение приборов и устройств
(продолжение)
Счетно-решающие приборы предназначены для обработки сигналов датчиков первичной информации
Слайд 14
ГИРОКУРСОУКАЗАТЕЛЬ
прибор одометрической наземной навигационной аппаратуры с гироскопическим чувствительным элементом, предназначенный для выработки
ГИРОКУРСОУКАЗАТЕЛЬ прибор одометрической наземной навигационной аппаратуры с гироскопическим чувствительным элементом, предназначенный для выработки
Слайд 15Первое свойство гироскопа
Так как главная ось гироскопа сохраняет неизменным первоначальное положение в
Первое свойство гироскопа
Так как главная ось гироскопа сохраняет неизменным первоначальное положение в
Слайд 16Первое свойство гироскопа
(продолжение)
В начальный момент главная ось X-X гироскопа находится в плоскости
Первое свойство гироскопа
(продолжение)
В начальный момент главная ось X-X гироскопа находится в плоскости
Слайд 17Второе свойство гироскопа
(прецессия)
Принцип второго свойства гироскопа (прецессии)
Под действием внешней силы,
Второе свойство гироскопа
(прецессия)
Принцип второго свойства гироскопа (прецессии)
Под действием внешней силы,
Слайд 18СЧЕТНО-РЕШАЮЩИЕ ПРИБОРЫ
Счетно-решающий прибор должен непрерывно решать следующие задачи:
- вычислять тригонометрические функции соsα
СЧЕТНО-РЕШАЮЩИЕ ПРИБОРЫ
Счетно-решающий прибор должен непрерывно решать следующие задачи:
- вычислять тригонометрические функции соsα
 Нанороботы
Нанороботы Отходы. Утилизация отходов
Отходы. Утилизация отходов Лидия Прхиповна Кузнецова (Уварова). Скульптор города Лысьвы 15.01.1934 – 15.08.2014
Лидия Прхиповна Кузнецова (Уварова). Скульптор города Лысьвы 15.01.1934 – 15.08.2014 Лекция 6. Показатели эффективности
Лекция 6. Показатели эффективности ВЗАИМОДЕЙСТВИЕ КЛАССНОГО РУКОВОДИТЕЛЯ С РОДИТЕЛЯМИ ( из практического опыта)
ВЗАИМОДЕЙСТВИЕ КЛАССНОГО РУКОВОДИТЕЛЯ С РОДИТЕЛЯМИ ( из практического опыта) Всеобщая декларация прав человека
Всеобщая декларация прав человека Фильтры/кондиционеры охлаждающей жидкости
Фильтры/кондиционеры охлаждающей жидкости Блок обучения. Для сотрудников Компании “Шин Line”
Блок обучения. Для сотрудников Компании “Шин Line” Der Dolmetscher
Der Dolmetscher Синтез наночастиц серебра
Синтез наночастиц серебра Высокий старт. Билимбай 1941-1943 гг. Реактивное самолётостроение. Вертолётостроение. Космонавтика
Высокий старт. Билимбай 1941-1943 гг. Реактивное самолётостроение. Вертолётостроение. Космонавтика Все люди от природы стремятся к знанию.Аристотель.
Все люди от природы стремятся к знанию.Аристотель. Экономические школы
Экономические школы Шаблон презентации проекта
Шаблон презентации проекта Национальная книжная палата БеларусиЕрмолич Елена Ивановна
Национальная книжная палата БеларусиЕрмолич Елена Ивановна Субъекты гражданского права
Субъекты гражданского права Как выводить глубоко офлайновые компании в есот
Как выводить глубоко офлайновые компании в есот 1Национальный центр развития философии и искусств «Большая Волхонка»
1Национальный центр развития философии и искусств «Большая Волхонка» Церковь и государство в XV - начале XVI вв
Церковь и государство в XV - начале XVI вв Мастер-классы
Мастер-классы Москва - город, в котором мы живем
Москва - город, в котором мы живем Тех лет не смолкнет слава. Герои - артековцы
Тех лет не смолкнет слава. Герои - артековцы Введение ФГОС
Введение ФГОС 11. КТтрон от ТехПром
11. КТтрон от ТехПром Кома
Кома  Вышивка крестом 7 класс
Вышивка крестом 7 класс Русский язык. 2 класс
Русский язык. 2 класс Лепка из пластилина. Резьба по кости
Лепка из пластилина. Резьба по кости