- ТЕОРИЯ МЕХАНИЗМОВ И МАШИН

Содержание
- 2. Основные понятия Механизмами называют изолированную часть некоторой механической системы (без источников и потребителей энергии), предназначенную для
- 3. Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с. «Вопрос о том, какие механизмы
- 4. Звенья шарнирно-рычажных механизмов Стойка – неподвижное звено механизма, на котором закреплены все другие его звенья. Кривошип
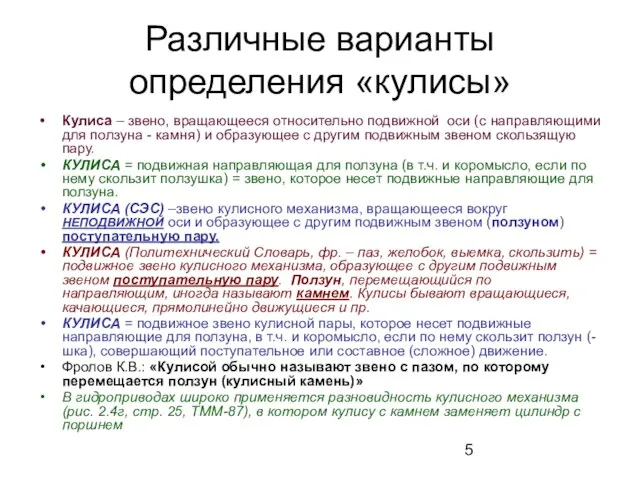
- 5. Различные варианты определения «кулисы» Кулиса – звено, вращающееся относительно подвижной оси (с направляющими для ползуна -
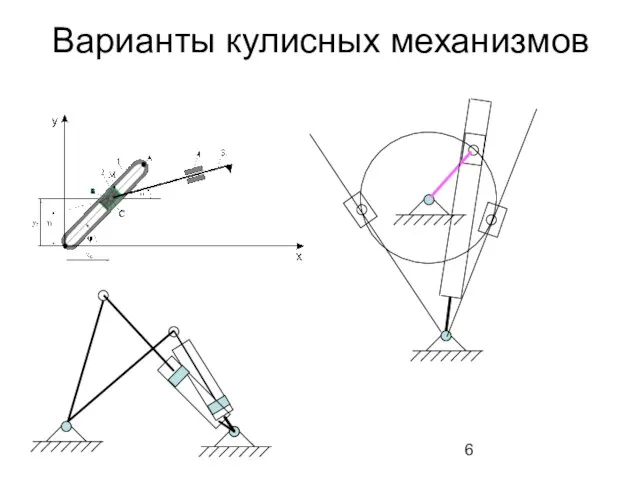
- 6. Варианты кулисных механизмов
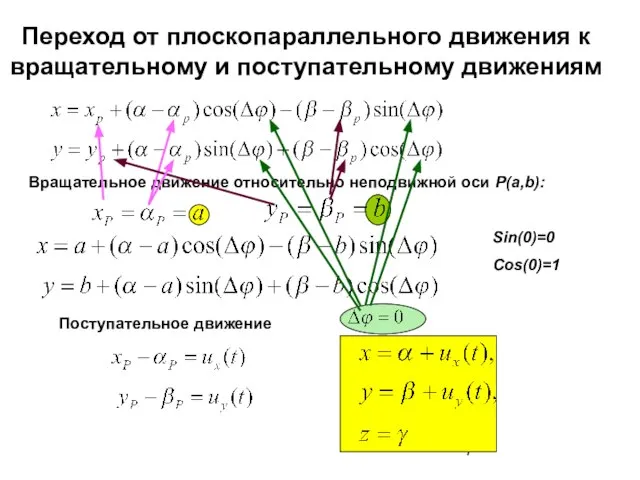
- 7. Вращательное движение относительно неподвижной оси Р(a,b): Поступательное движение Sin(0)=0 Cos(0)=1 Переход от плоскопараллельного движения к вращательному
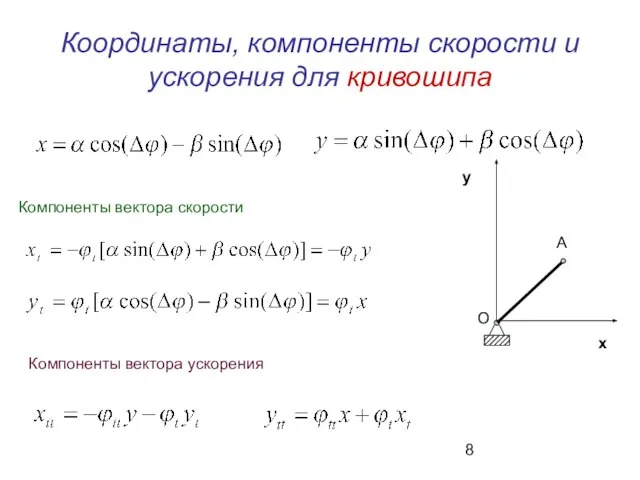
- 8. Координаты, компоненты скорости и ускорения для кривошипа Компоненты вектора ускорения О А Компоненты вектора скорости x
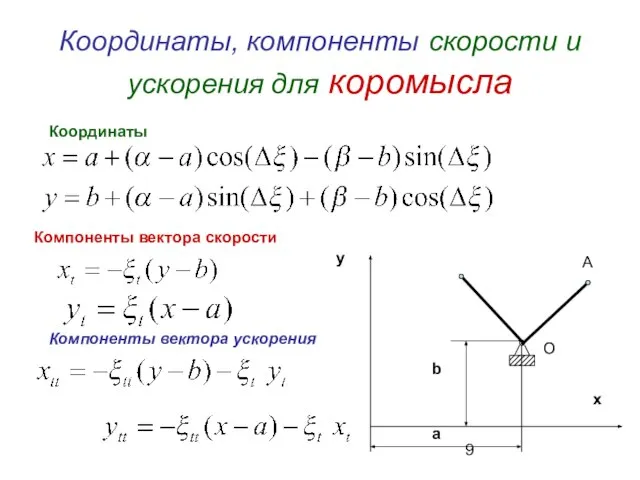
- 9. Координаты, компоненты скорости и ускорения для коромысла О А Компоненты вектора скорости Координаты Компоненты вектора ускорения
- 10. Координаты, компоненты скорости и ускорения для шатуна Уравнения движения в форме Лагранжа Компоненты скорости: в форме
- 11. Координаты, компоненты скорости и ускорения для ползуна Уравнения движения Компоненты вектора перемещения Компоненты вектора ускорения Компоненты
- 12. Кинематические связи в шарнирно - рычажных механизмах Кинематическими связями называют соотношения между постоянными (расстояния между осями
- 13. Кривошипно-ползунный механизм b b
- 14. Кривошипно-ползунный механизм (расчет через координаты точки А) А А b
- 15. Кривошипно-ползунный механизм. Другой вариант записи кинематических связей Н L1 L2 =const
- 16. Кривошипно-коромысловый механизм O A B L2 L1 O1 C1 C2 M L3 X Y C3 ϕ
- 17. Кривошипно-коромысловый механизм ; (a)
- 18. Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла ; (a) Из системы (а) получаем 4
- 19. Соотношения между угловыми скоростями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (а) (см. сл. 16-18) по времени
- 20. Решение системы линейных уравнений по методу Крамера Исходная система и ее основной определитель «Дополнительные определители» Решение
- 21. Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма Дифференцируем систему уравнений (b) (см. сл. 19) по времени
- 22. Кулисный механизм. Угловые характеристики AE=
- 23. Кулисные механизмы. Направляющая с неподвижной осью
- 24. Кулисные механизмы. Направляющая с подвижной осью LТЕК
- 25. Все механизмы отличаются кинематическими связями. Число возможных вариантов механизмов и кинематических связей бесконечно.
- 26. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
- 27. КУЛИСНАЯ ПАРА С ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ Пусть уравнение фиксированной направляющей имеет вид (1)
- 28. УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА Уравнение прямой, вдоль которой движется ползун (1) где
- 29. F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка пересечения перпендикуляра, опущенного из
- 30. Расстояние от точки Р(хР, уР) до прямой А*х + В*у + С = 0 определяет уравнение
- 31. Два коромысла с кулисной парой
- 32. Два коромысла с кулисной парой - 2 D(x D,yD) K(x K,yK) O1(a,b) mu Teta Ksi L4
- 33. Два коромысла с кулисной парой - 3
- 34. Рекомендуемая последовательность кинематического анализа механизма -1 1. Выбрать (получить) кинематическую схему механизма. Преобразовать ее к общему
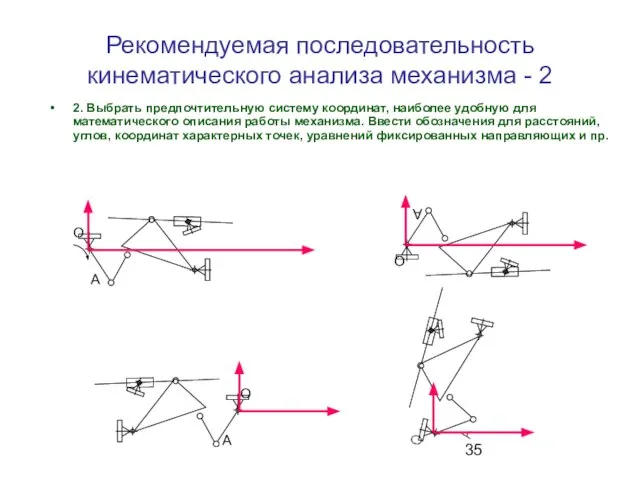
- 35. Рекомендуемая последовательность кинематического анализа механизма - 2 2. Выбрать предпочтительную систему координат, наиболее удобную для математического
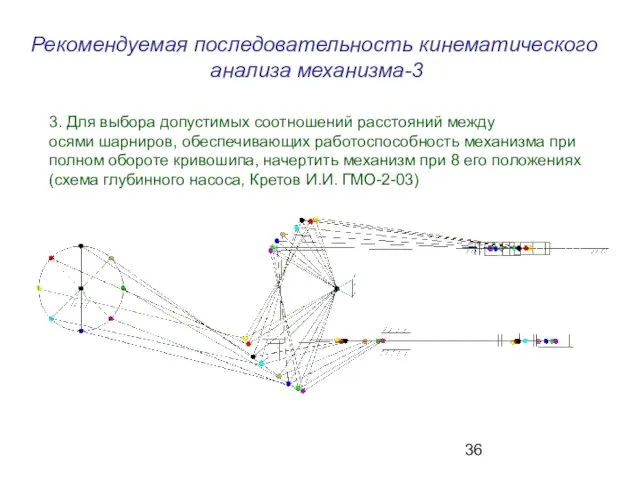
- 36. Рекомендуемая последовательность кинематического анализа механизма-3 3. Для выбора допустимых соотношений расстояний между осями шарниров, обеспечивающих работоспособность
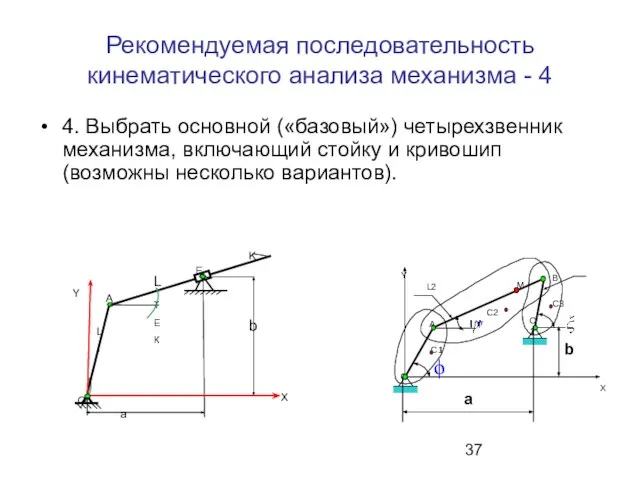
- 37. Рекомендуемая последовательность кинематического анализа механизма - 4 4. Выбрать основной («базовый») четырехзвенник механизма, включающий стойку и
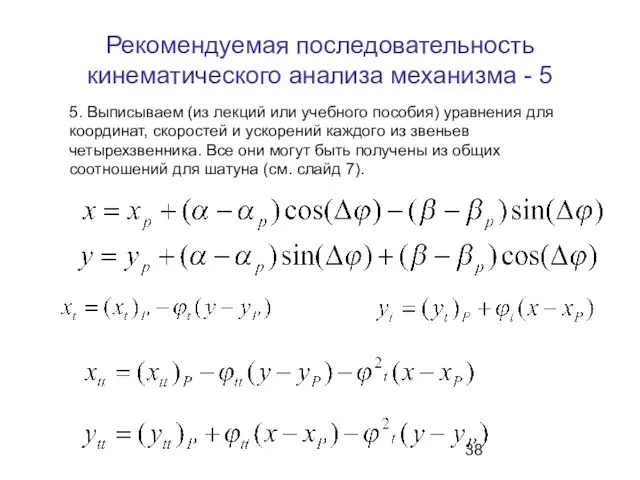
- 38. Рекомендуемая последовательность кинематического анализа механизма - 5 5. Выписываем (из лекций или учебного пособия) уравнения для
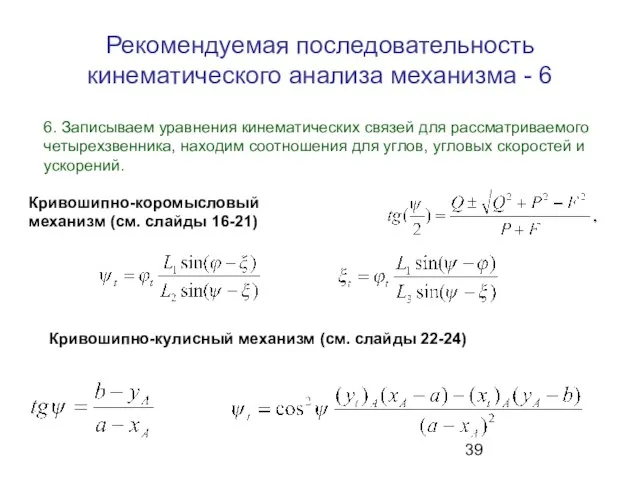
- 39. Рекомендуемая последовательность кинематического анализа механизма - 6 6. Записываем уравнения кинематических связей для рассматриваемого четырехзвенника, находим
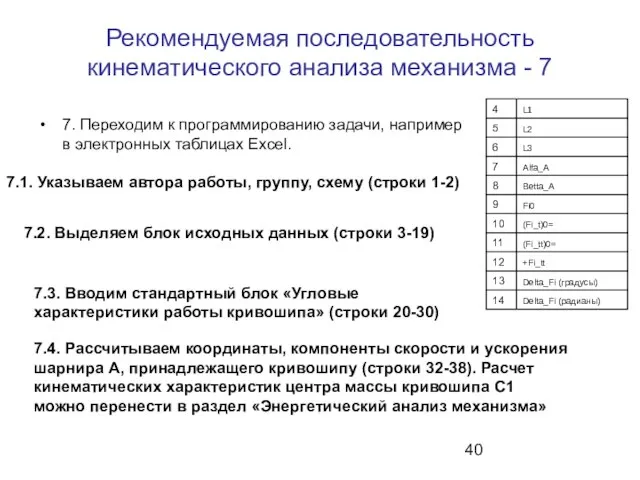
- 40. Рекомендуемая последовательность кинематического анализа механизма - 7 7. Переходим к программированию задачи, например в электронных таблицах
- 41. Рекомендуемая последовательность кинематического анализа механизма - 8 Переходим к программированию блока «Кинематические связи» 8.1. Вводим промежуточные
- 42. Рекомендуемая последовательность кинематического анализа механизма - 9 Переходим к программированию кинематических характеристик ведомых звеньев четырехзвенника 9.1.
- 43. Рекомендуемая последовательность кинематического анализа механизма - 10 Через каждые 5-8 строк программы проводим проверку результатов кинематических
- 45. Скачать презентацию
Слайд 2Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и потребителей
Основные понятия
Механизмами называют изолированную часть некоторой механической системы (без источников и потребителей
Слайд 3Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос о
Лихтенхельдт В. Синтез механизмов. – М.: Наука, 1978. – 228 с.
«Вопрос о
Слайд 4Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все другие
Звенья шарнирно-рычажных механизмов
Стойка – неподвижное звено механизма, на котором закреплены все другие
Слайд 5Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с направляющими
Различные варианты определения «кулисы»
Кулиса – звено, вращающееся относительно подвижной оси (с направляющими
Слайд 6Варианты кулисных механизмов
Варианты кулисных механизмов
Слайд 7Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения к
Вращательное движение относительно неподвижной оси Р(a,b):
Поступательное движение
Sin(0)=0
Cos(0)=1
Переход от плоскопараллельного движения к
Слайд 8Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора скорости
Координаты, компоненты скорости и ускорения для кривошипа
Компоненты вектора ускорения
О
А
Компоненты вектора скорости
Слайд 9Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
Координаты, компоненты скорости и ускорения для коромысла
О
А
Компоненты вектора скорости
Координаты
Компоненты вектора ускорения
b
a
y
x
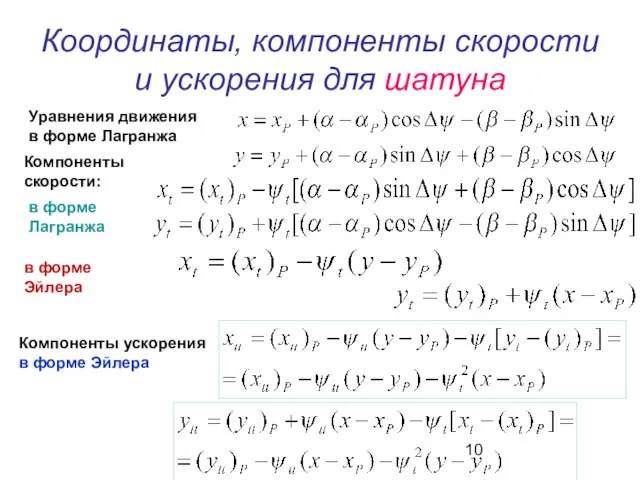
Слайд 10Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты скорости:
в
Координаты, компоненты скорости и ускорения для шатуна
Уравнения движения в форме Лагранжа
Компоненты скорости:
в
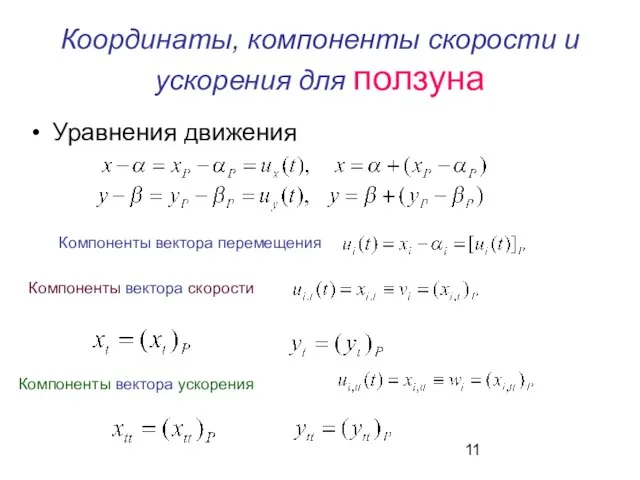
Слайд 11Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты вектора
Координаты, компоненты скорости и ускорения для ползуна
Уравнения движения
Компоненты вектора перемещения
Компоненты вектора
Слайд 12Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между постоянными
Кинематические связи
в шарнирно - рычажных механизмах
Кинематическими связями называют соотношения между постоянными
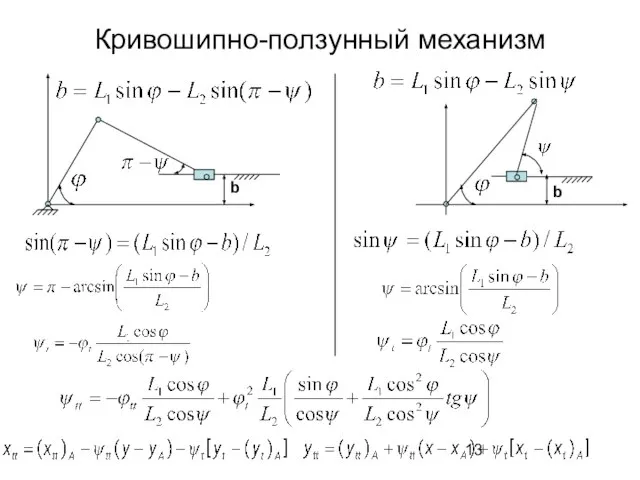
Слайд 13Кривошипно-ползунный механизм
b
b
Кривошипно-ползунный механизм
b
b
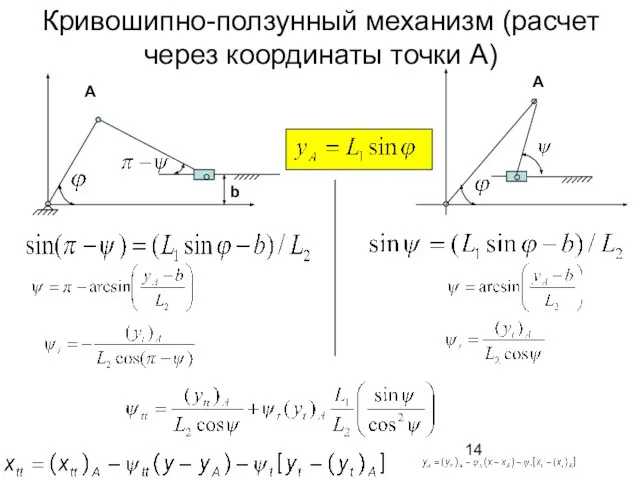
Слайд 14Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
Кривошипно-ползунный механизм (расчет через координаты точки А)
А
А
b
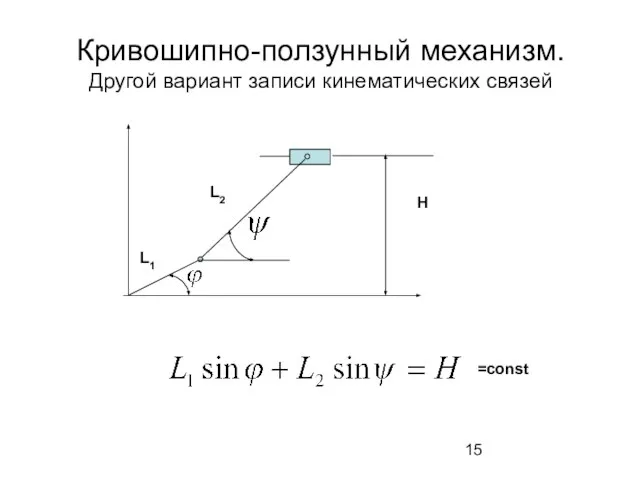
Слайд 15Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
Кривошипно-ползунный механизм. Другой вариант записи кинематических связей
Н
L1
L2
=const
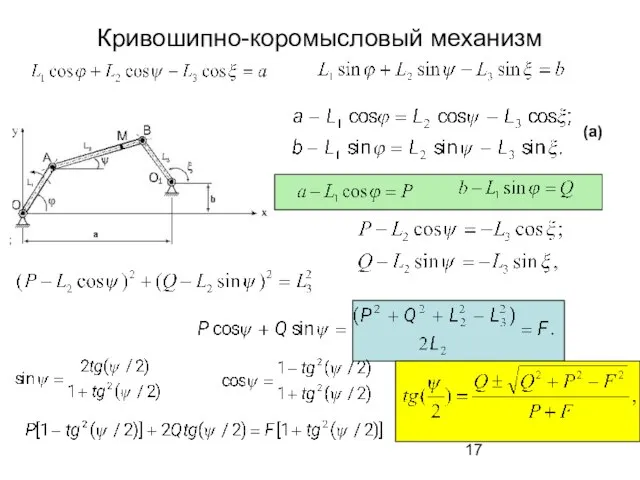
Слайд 16Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
Кривошипно-коромысловый механизм
O
A
B
L2
L1
O1
C1
C2
M
L3
X
Y
C3
ϕ
ψ
b
a
(a)
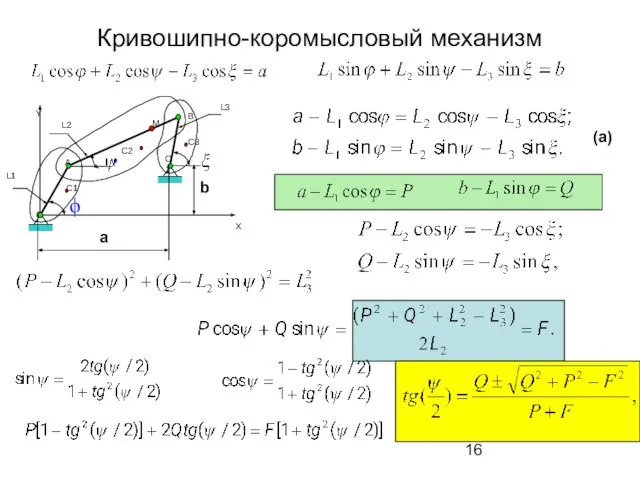
Слайд 17Кривошипно-коромысловый механизм
;
(a)
Кривошипно-коромысловый механизм
;
(a)
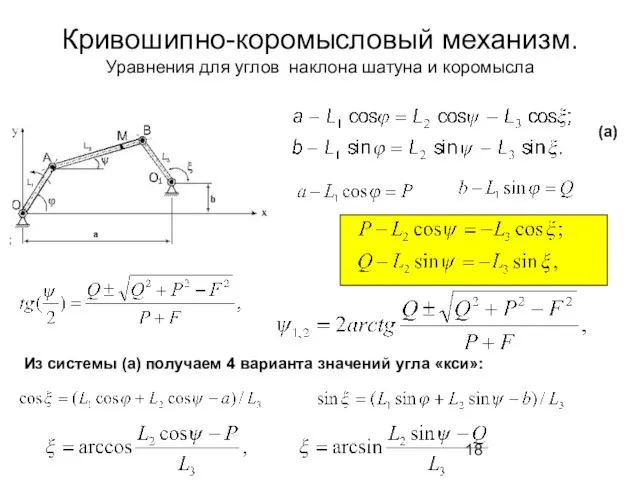
Слайд 18Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из системы
Кривошипно-коромысловый механизм. Уравнения для углов наклона шатуна и коромысла
;
(a)
Из системы
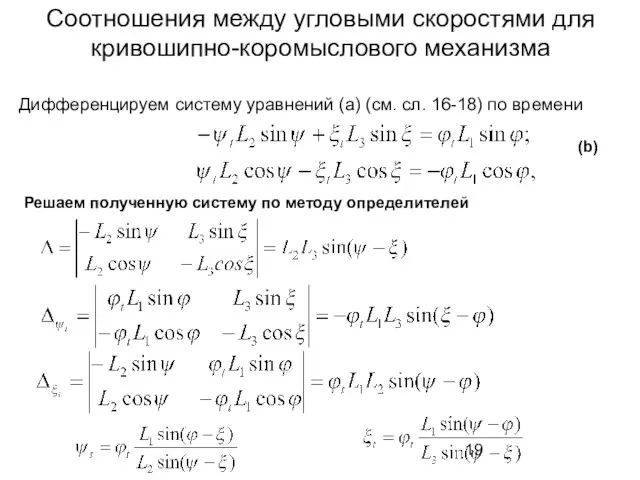
Слайд 19Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см. сл.
Соотношения между угловыми скоростями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (а) (см. сл.
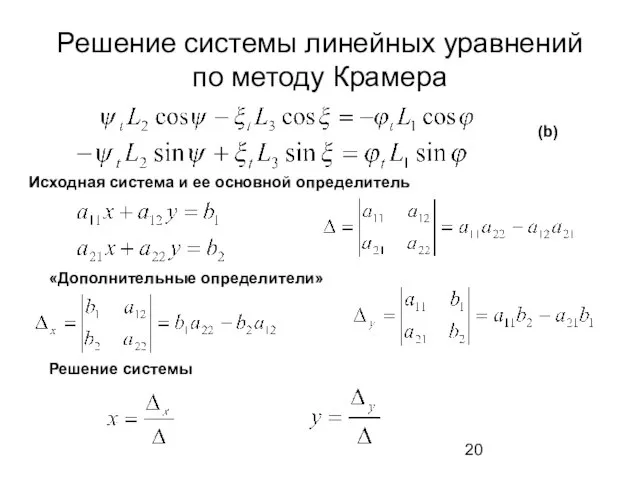
Слайд 20Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной определитель
«Дополнительные
Решение системы линейных уравнений по методу Крамера
Исходная система и ее основной определитель
«Дополнительные
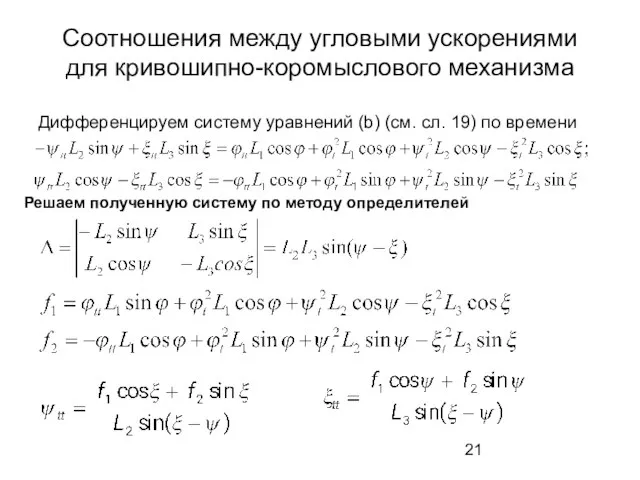
Слайд 21Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см. сл.
Соотношения между угловыми ускорениями для кривошипно-коромыслового механизма
Дифференцируем систему уравнений (b) (см. сл.
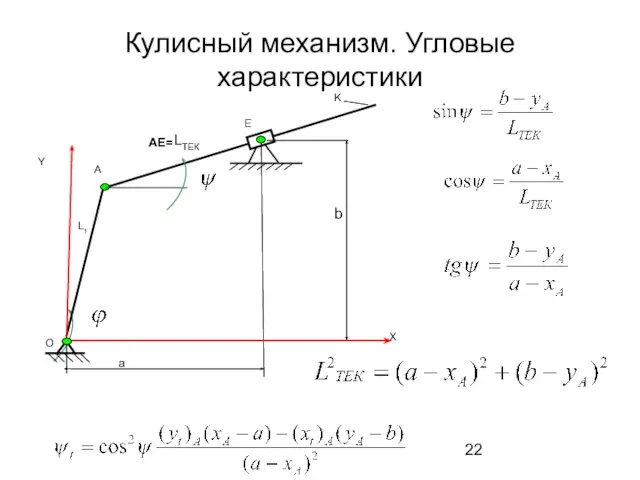
Слайд 22Кулисный механизм. Угловые характеристики
AE=
Кулисный механизм. Угловые характеристики
AE=
Слайд 23Кулисные механизмы.
Направляющая с неподвижной осью
Кулисные механизмы.
Направляющая с неподвижной осью

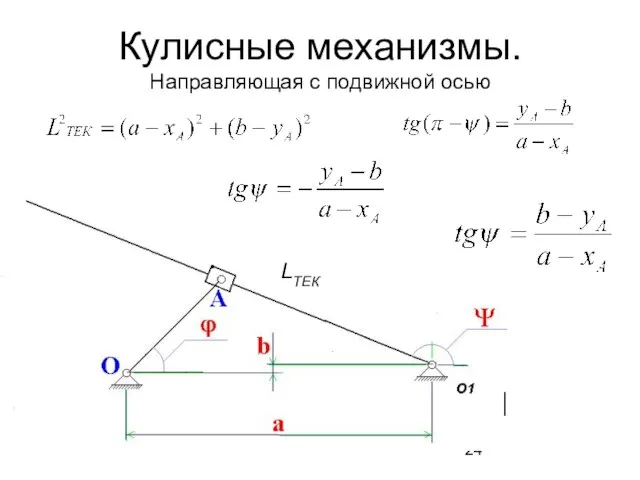
Слайд 24Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Кулисные механизмы.
Направляющая с подвижной осью
LТЕК
Слайд 25Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей бесконечно.
Все механизмы отличаются кинематическими связями.
Число возможных вариантов механизмов и кинематических связей бесконечно.
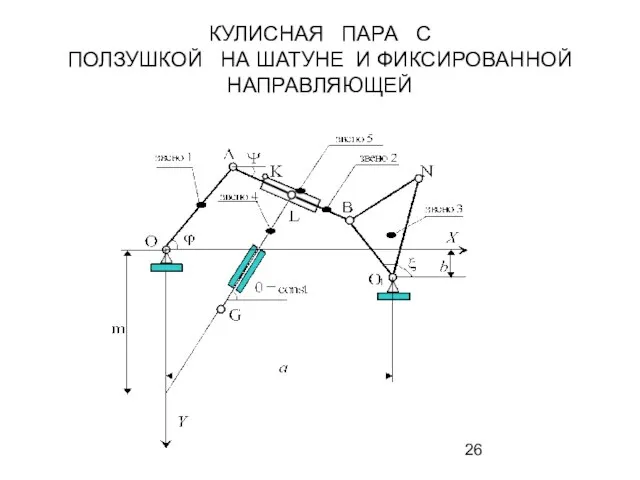
Слайд 26КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Слайд 27КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
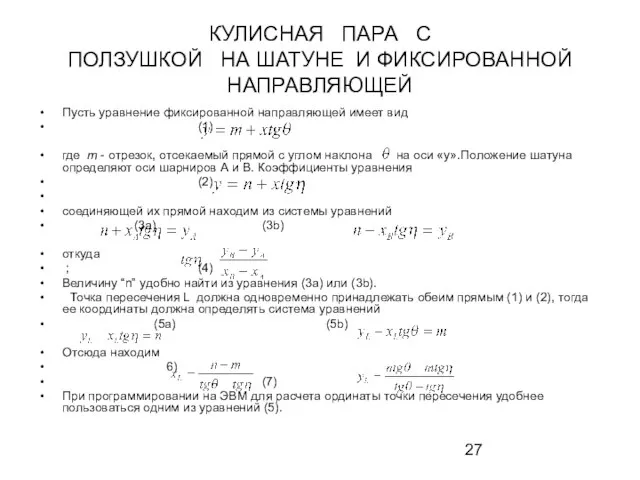
Пусть уравнение фиксированной направляющей имеет
КУЛИСНАЯ ПАРА С
ПОЛЗУШКОЙ НА ШАТУНЕ И ФИКСИРОВАННОЙ НАПРАВЛЯЮЩЕЙ
Пусть уравнение фиксированной направляющей имеет
Слайд 28УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль которой
УГОЛ МЕЖДУ ШАТУНОМ И ФИКСИРОВАННЫМ НАПРАВЛЕНИЕМ ДВИЖЕНИЯ ПОЛЗУНА
Уравнение прямой, вдоль которой
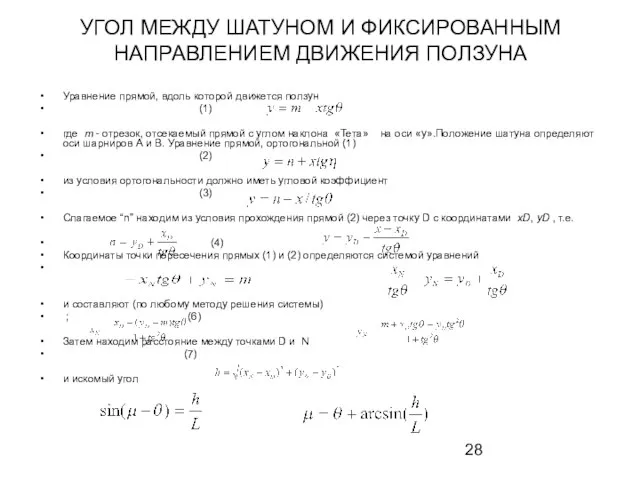
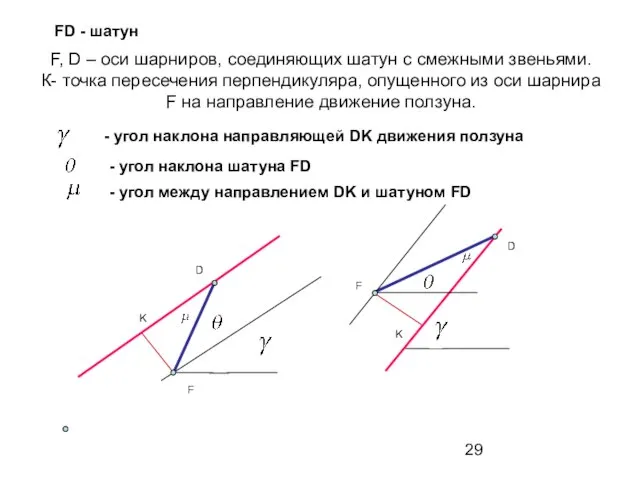
Слайд 29F, D – оси шарниров, соединяющих шатун с смежными звеньями.
К- точка пересечения
F, D – оси шарниров, соединяющих шатун с смежными звеньями. К- точка пересечения
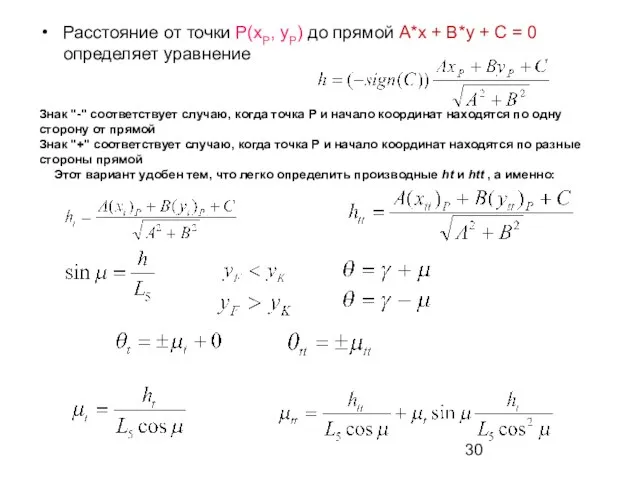
Слайд 30Расстояние от точки Р(хР, уР) до прямой А*х + В*у + С
Расстояние от точки Р(хР, уР) до прямой А*х + В*у + С
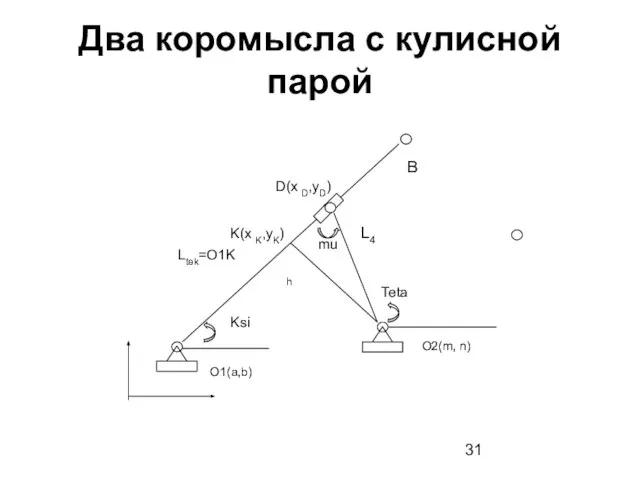
Слайд 31Два коромысла с кулисной парой
Два коромысла с кулисной парой
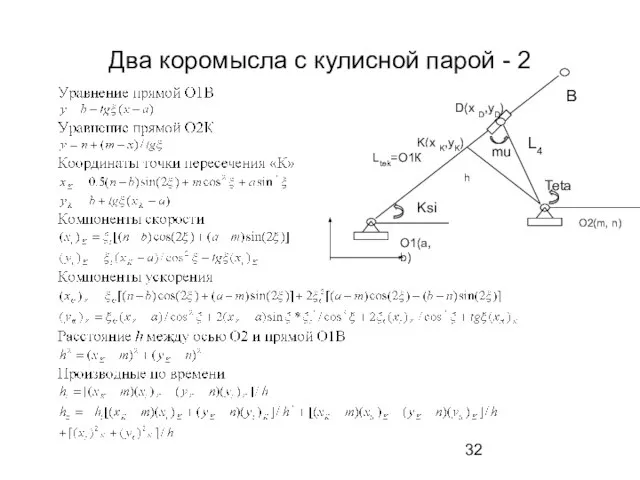
Слайд 32Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
Два коромысла с кулисной парой - 2
D(x D,yD)
K(x K,yK)
O1(a,b)
mu
Teta
Ksi
L4
B
O2(m, n)
h
Ltek=O1К
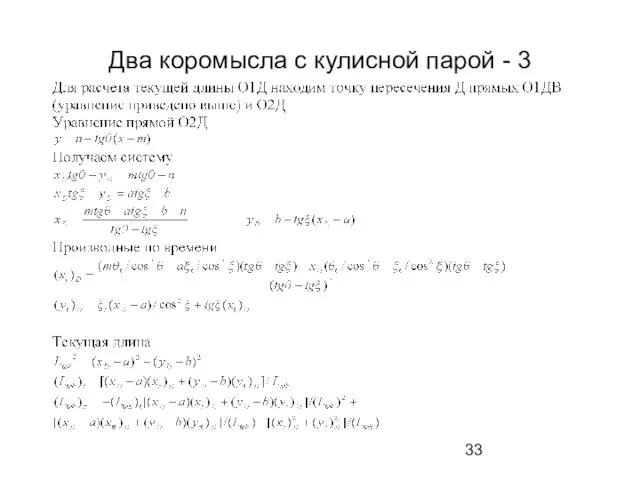
Слайд 33Два коромысла с кулисной парой - 3
Два коромысла с кулисной парой - 3
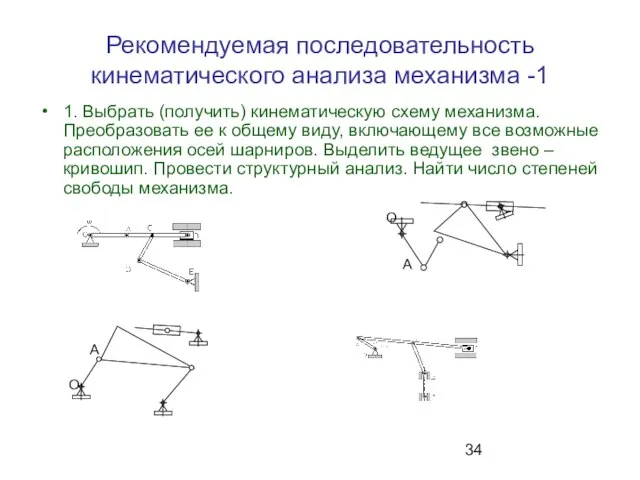
Слайд 34Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма. Преобразовать
Рекомендуемая последовательность кинематического анализа механизма -1
1. Выбрать (получить) кинематическую схему механизма. Преобразовать
Слайд 35Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат, наиболее
Рекомендуемая последовательность кинематического анализа механизма - 2
2. Выбрать предпочтительную систему координат, наиболее
Слайд 36Рекомендуемая последовательность кинематического
анализа механизма-3
3. Для выбора допустимых соотношений расстояний между
осями шарниров,
Рекомендуемая последовательность кинематического
анализа механизма-3
3. Для выбора допустимых соотношений расстояний между
осями шарниров,
Слайд 37Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник механизма,
Рекомендуемая последовательность кинематического анализа механизма - 4
4. Выбрать основной («базовый») четырехзвенник механизма,
Слайд 38Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или учебного
Рекомендуемая последовательность кинематического анализа механизма - 5
5. Выписываем (из лекций или учебного
Слайд 39Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей для
Рекомендуемая последовательность кинематического анализа механизма - 6
6. Записываем уравнения кинематических связей для
Слайд 40Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи, например
Рекомендуемая последовательность кинематического анализа механизма - 7
7. Переходим к программированию задачи, например
Слайд 41Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические связи»
8.1.
Рекомендуемая последовательность кинематического анализа механизма - 8
Переходим к программированию блока «Кинематические связи»
8.1.
Слайд 42Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик ведомых
Рекомендуемая последовательность кинематического анализа механизма - 9
Переходим к программированию кинематических характеристик ведомых
Слайд 43Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы проводим
Рекомендуемая последовательность кинематического анализа механизма - 10
Через каждые 5-8 строк программы проводим
 Модульная структурасистемы ITAS
Модульная структурасистемы ITAS Инвестор, новый уровень
Инвестор, новый уровень Разработка и изготовление ансамбля коллекции женской одежды Butterfly
Разработка и изготовление ансамбля коллекции женской одежды Butterfly Илья Муромец и Соловей-разбойник
Илья Муромец и Соловей-разбойник Времена года. Лабораторная работа №5
Времена года. Лабораторная работа №5 «СОРОК МГНОВЕНИЙ НАЕДИНЕ С КОРНЕМ СТЕПЕНИ n»
«СОРОК МГНОВЕНИЙ НАЕДИНЕ С КОРНЕМ СТЕПЕНИ n» «Регион 74 в составе Российской Федерации».
«Регион 74 в составе Российской Федерации». Правовая информация для несовершеннолетних и их родителей
Правовая информация для несовершеннолетних и их родителей Дальневосточная пожарно-спасательная академия
Дальневосточная пожарно-спасательная академия Воспитательный потенциал современного образования:вызов родительской общественности
Воспитательный потенциал современного образования:вызов родительской общественности СТРЕССОВЫЕ СИТУАЦИИ НА РАБОЧЕМ МЕСТЕ
СТРЕССОВЫЕ СИТУАЦИИ НА РАБОЧЕМ МЕСТЕ Винсент Ван Гог. Подсолнухи
Винсент Ван Гог. Подсолнухи Аккумуляторная мотопила stihl gta 26
Аккумуляторная мотопила stihl gta 26 Китай
Китай Об использовании новых организационных форм медицинского обеспечения и оценки результатов новой системы оплаты труда
Об использовании новых организационных форм медицинского обеспечения и оценки результатов новой системы оплаты труда Татарское декоративно-прикладное искусство
Татарское декоративно-прикладное искусство Буквы Ч,ч, обозначающие звук [ч’]
Буквы Ч,ч, обозначающие звук [ч’] Разрезы в аксонометрических проекциях
Разрезы в аксонометрических проекциях Чему учил китайский мудрец Конфуций
Чему учил китайский мудрец Конфуций Порядок обращения за страховой пенсией по случаю потери кормильца
Порядок обращения за страховой пенсией по случаю потери кормильца Презентация на тему Шолохов «Донские рассказы»
Презентация на тему Шолохов «Донские рассказы» 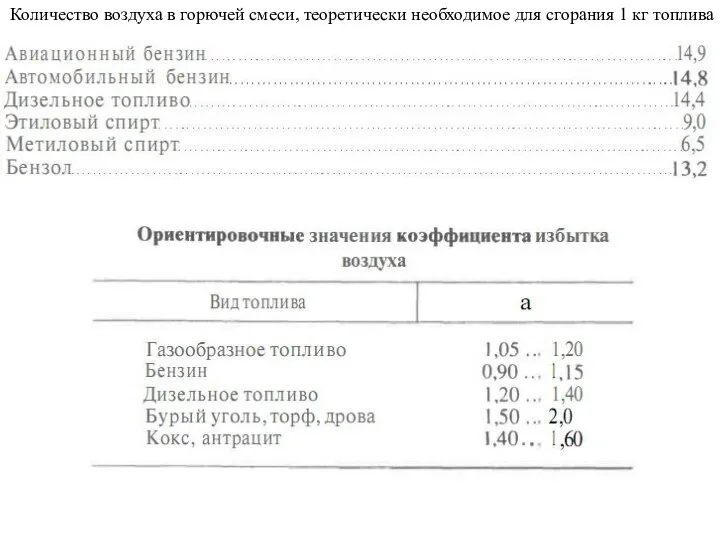 Сгорание топлива. Октановое число
Сгорание топлива. Октановое число Налоговый потенциал
Налоговый потенциал Влияние плавания на здоровье человека
Влияние плавания на здоровье человека Топочные устройства ПК
Топочные устройства ПК Иллюстрационный материал к реферату на тему: Эмпирическая школа управления
Иллюстрационный материал к реферату на тему: Эмпирическая школа управления Can you swim?
Can you swim? МОДЕЛИ УПРАВЛЕНИЯ ЗАПАСАМИ МОДЕЛИ УПРАВЛЕНИЯ ЗАПАСАМИ
МОДЕЛИ УПРАВЛЕНИЯ ЗАПАСАМИ МОДЕЛИ УПРАВЛЕНИЯ ЗАПАСАМИ