- Цифровая и микропроцессорная техника в управлении

Содержание
- 2. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ Первые контроллеры появились в 1971 году (патент фирмы Texas
- 3. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ ARM ARM Advanced RISC Machines RISC Reduced Instruction Set
- 4. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ ПАМЯТЬ МИКРОКОНТРОЛЛЕРА Для хранения исполняемого кода программ используется flash память
- 5. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ ИНТЕРФЕЙСЫ МИКРОКОНТРОЛЛЕРА
- 6. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ Защита от переполюсовки ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ
- 7. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ Защита, выполненная на диоде,
- 8. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ ЦИФРОВЫЕ ВХОДЫ/ВЫХОДЫ Цифровые контакты (пины, порты, входы/выходы,
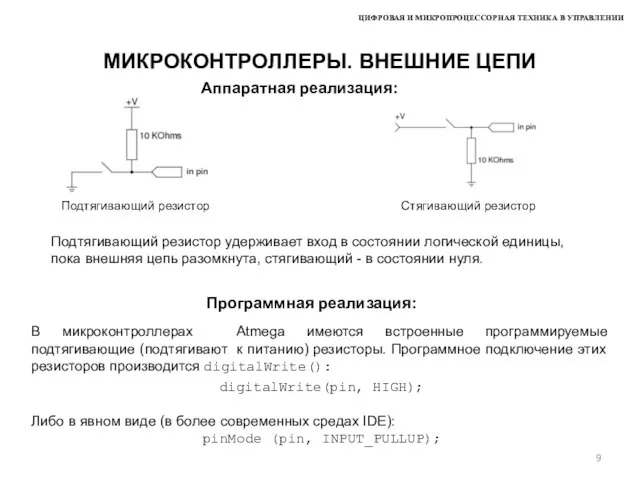
- 9. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ В микроконтроллерах Atmega имеются встроенные программируемые подтягивающие
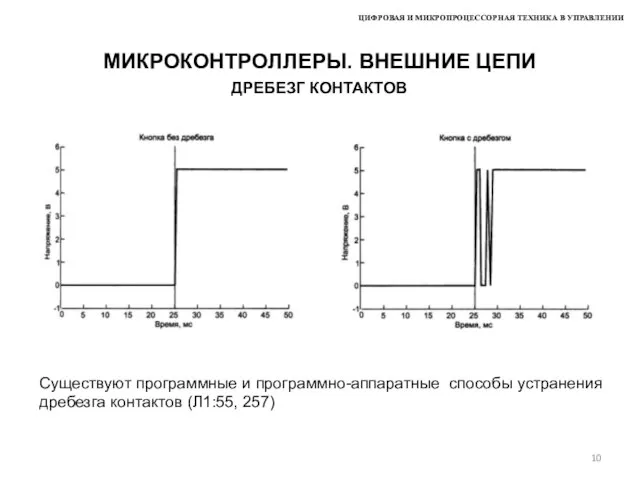
- 10. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ ДРЕБЕЗГ КОНТАКТОВ Существуют программные и программно-аппаратные способы
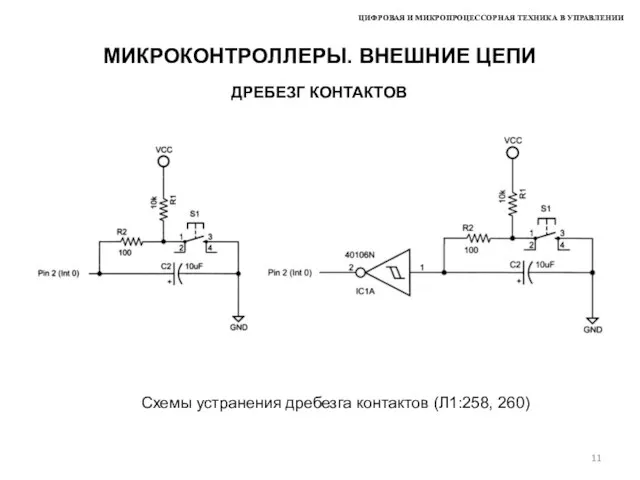
- 11. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ ДРЕБЕЗГ КОНТАКТОВ Схемы устранения дребезга контактов (Л1:258,
- 12. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
- 13. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ В общем случае, программы загружаются в микроконтроллеры
- 14. МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ Загрузчик запускается сразу, после включения питания и
- 15. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2 На модуле ST-LINK V2 используются
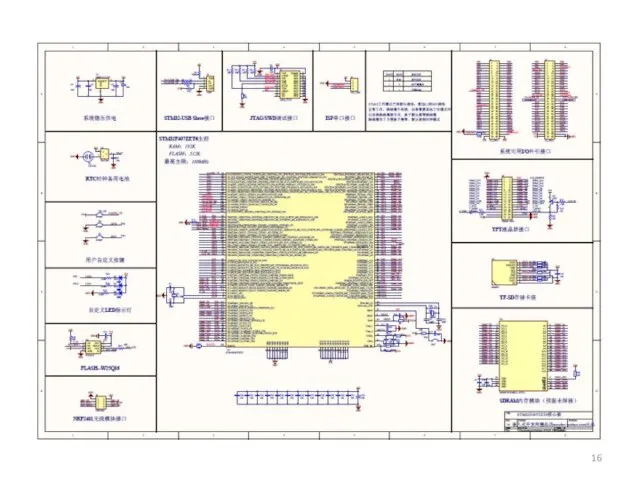
- 17. ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2 На плате STM32F407ZET6 используется 20-пиновый
- 19. Скачать презентацию
Слайд 2ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ
Первые контроллеры появились в 1971 году (патент
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ
Первые контроллеры появились в 1971 году (патент

Слайд 3ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ ARM
ARM
Advanced RISC Machines
RISC
Reduced Instruction Set Computer
архитектура
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ ARM
ARM
Advanced RISC Machines
RISC
Reduced Instruction Set Computer
архитектура
Слайд 4ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
ПАМЯТЬ МИКРОКОНТРОЛЛЕРА
Для хранения исполняемого кода программ используется
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
ПАМЯТЬ МИКРОКОНТРОЛЛЕРА
Для хранения исполняемого кода программ используется
Слайд 5ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
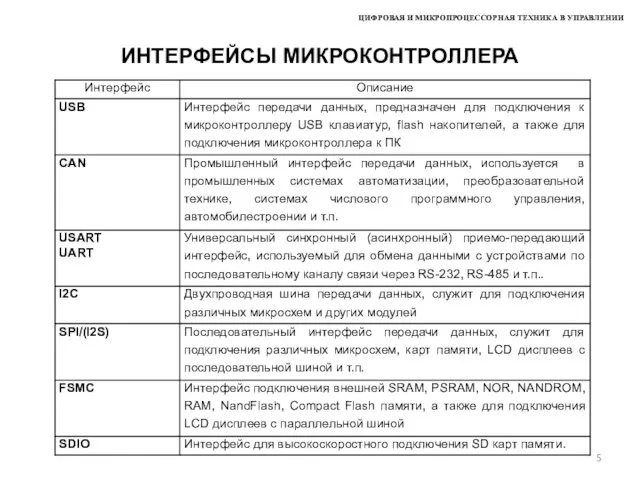
ИНТЕРФЕЙСЫ МИКРОКОНТРОЛЛЕРА
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
ИНТЕРФЕЙСЫ МИКРОКОНТРОЛЛЕРА
Слайд 6ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
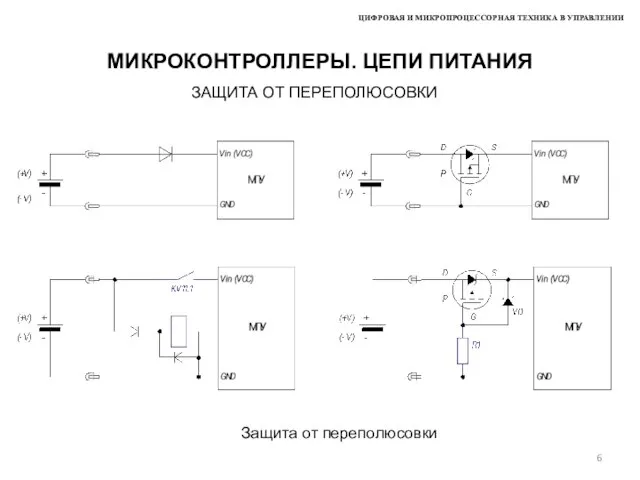
МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ
Защита от переполюсовки
ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ
Защита от переполюсовки
ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ
Слайд 7ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ
ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ
Защита, выполненная на
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЦЕПИ ПИТАНИЯ
ЗАЩИТА ОТ ПЕРЕПОЛЮСОВКИ
Защита, выполненная на
Слайд 8ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ЦИФРОВЫЕ ВХОДЫ/ВЫХОДЫ
Цифровые контакты (пины, порты,
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ЦИФРОВЫЕ ВХОДЫ/ВЫХОДЫ
Цифровые контакты (пины, порты,
Слайд 9ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
В микроконтроллерах Atmega имеются встроенные
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
В микроконтроллерах Atmega имеются встроенные
Слайд 10ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ДРЕБЕЗГ КОНТАКТОВ
Существуют программные и программно-аппаратные
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ДРЕБЕЗГ КОНТАКТОВ
Существуют программные и программно-аппаратные
Слайд 11ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ДРЕБЕЗГ КОНТАКТОВ
Схемы устранения дребезга контактов
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ВНЕШНИЕ ЦЕПИ
ДРЕБЕЗГ КОНТАКТОВ
Схемы устранения дребезга контактов
Слайд 12ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ

Слайд 13ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
В общем случае, программы загружаются
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
В общем случае, программы загружаются

Слайд 14МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
Загрузчик запускается сразу, после включения
МИКРОКОНТРОЛЛЕРЫ. ЗАГРУЗКА ПРОГРАММ
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
Загрузчик запускается сразу, после включения
Слайд 15ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ.
ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2
На модуле ST-LINK
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ.
ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2
На модуле ST-LINK

Слайд 17ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ.
ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2
На плате STM32F407ZET6
ЦИФРОВАЯ И МИКРОПРОЦЕССОРНАЯ ТЕХНИКА В УПРАВЛЕНИИ
МИКРОКОНТРОЛЛЕРЫ.
ЗАГРУЗКА ПРОГРАММЧЕРЕЗ ST_LINK32 V2
На плате STM32F407ZET6

 Геофизический мониторингподводных трубопроводовна основе НСП
Геофизический мониторингподводных трубопроводовна основе НСП Ассоциация Правообладателей и Поставщиков контента
Ассоциация Правообладателей и Поставщиков контента Презентация на тему Повышение роли таможни в обеспечении доходов государственной казны
Презентация на тему Повышение роли таможни в обеспечении доходов государственной казны  Здоровая работа. Волонтеры профессионального роста
Здоровая работа. Волонтеры профессионального роста Секретные задания Человека - паука
Секретные задания Человека - паука Признаки животных
Признаки животных Там есть сцена и кулисы, И актеры, и актрисы, Есть афиша и антракт, Декорации, аншлаг. И, конечно же, премьера! Догадались вы, наверно...
Там есть сцена и кулисы, И актеры, и актрисы, Есть афиша и антракт, Декорации, аншлаг. И, конечно же, премьера! Догадались вы, наверно... Казахстан в годы Великой Отечественной Войны
Казахстан в годы Великой Отечественной Войны Политический PR
Политический PR Создание педагогических условий для развития индивидуальности школьника
Создание педагогических условий для развития индивидуальности школьника Почвенные ресурсы России 8 класс
Почвенные ресурсы России 8 класс Использование на уроках литературы приемов технологии компетентностного подхода «Развитие критического мышления через чтение
Использование на уроках литературы приемов технологии компетентностного подхода «Развитие критического мышления через чтение  TERRA бағдарламасын пайдаланып төмен көміртекті феррохромды балқыту кезінде фазалық жағдайлардың
TERRA бағдарламасын пайдаланып төмен көміртекті феррохромды балқыту кезінде фазалық жағдайлардың Хлобчатобумажные и льняные ткани
Хлобчатобумажные и льняные ткани muzyka_i_kino
muzyka_i_kino Презентация (11)
Презентация (11) Презентация на тему Жизнь и творчество Уильяма Шекспира
Презентация на тему Жизнь и творчество Уильяма Шекспира  Презентация на тему Word building
Презентация на тему Word building Презентация на тему Функции тонкого и толстого кишечника Аппендицит
Презентация на тему Функции тонкого и толстого кишечника Аппендицит  Презентация на тему Открытие радиоактивности
Презентация на тему Открытие радиоактивности  Государство и право Древнего мира
Государство и право Древнего мира корпоротивное цен. предложение
корпоротивное цен. предложение Як ви знаєте Полтавщину. Гра
Як ви знаєте Полтавщину. Гра Презентация на тему Ребусы по информатике
Презентация на тему Ребусы по информатике 7 искушений Ивана Тургенева
7 искушений Ивана Тургенева Я и компьютер
Я и компьютер Новейшие технологии, средства защиты и очистки атмосферного воздуха от выбросов газа
Новейшие технологии, средства защиты и очистки атмосферного воздуха от выбросов газа Солнцеи жизнь Земли
Солнцеи жизнь Земли