- Введение, общие сведения. Определение понятия электропривод

Содержание
- 2. Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую энергию в механическую и обратно
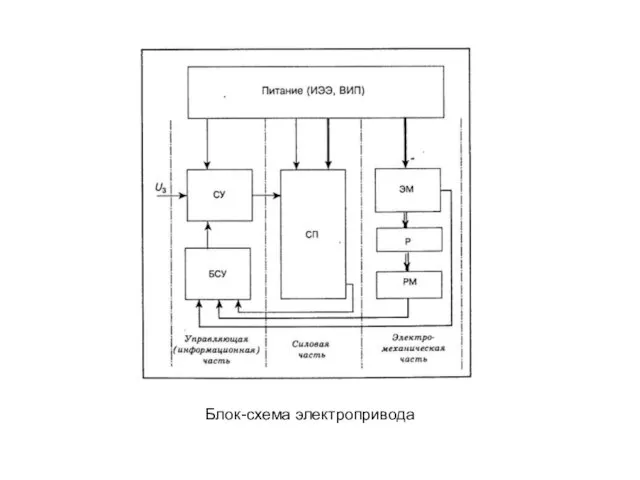
- 3. Блок-схема электропривода
- 4. Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной посредством механической передачи (редуктор
- 5. В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических параметров источника электрической энергии
- 6. Электропривод имеет два канала – силовой и информационный (см. следующий рисунок ). По первому транспортируется преобразуемая
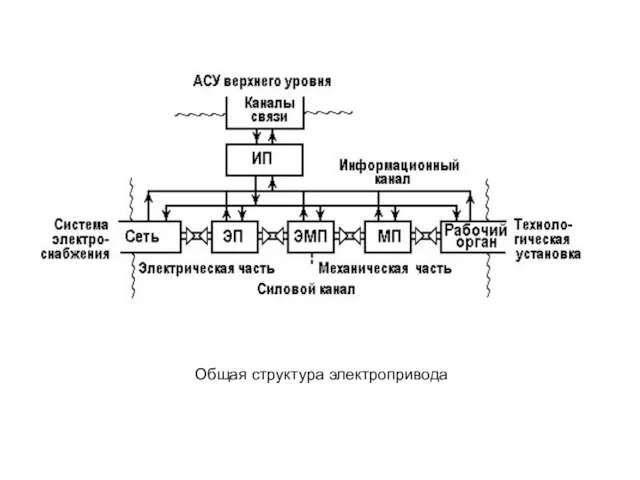
- 7. Общая структура электропривода
- 8. Силовой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит
- 9. Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором
- 10. 1.2. Функции электропривода Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след. рис.). Будем полагать, что мощность
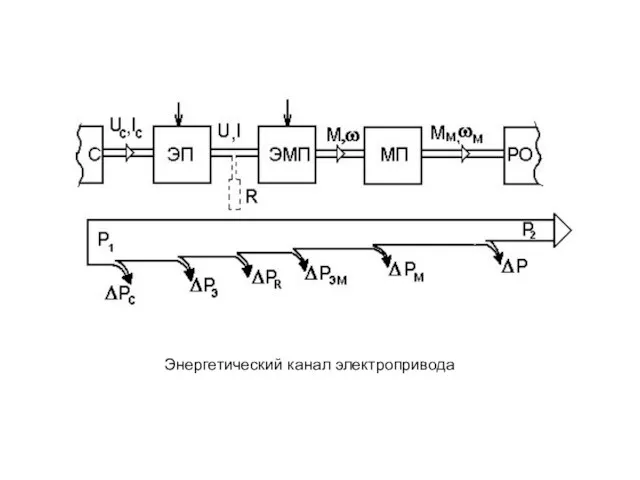
- 11. Энергетический канал электропривода
- 12. Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и
- 13. Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М,
- 14. Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с
- 15. В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери Р во всех элементах
- 16. Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.) достаточно, чтобы понять, что объект
- 17. Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных объектов, т.е. с искусственными простыми
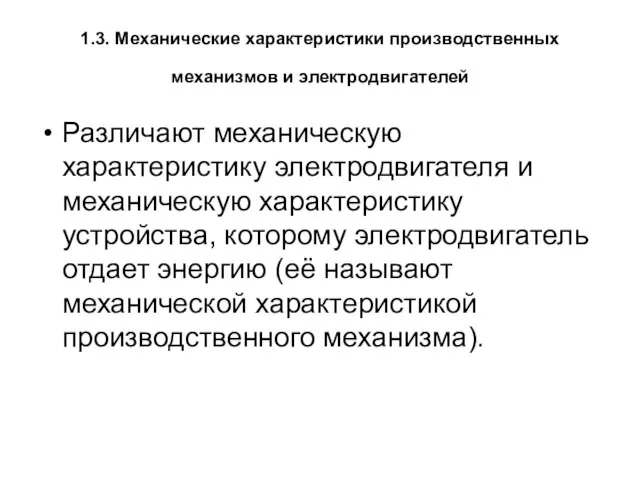
- 18. 1.3. Механические характеристики производственных механизмов и электродвигателей Различают механическую характеристику электродвигателя и механическую характеристику устройства, которому
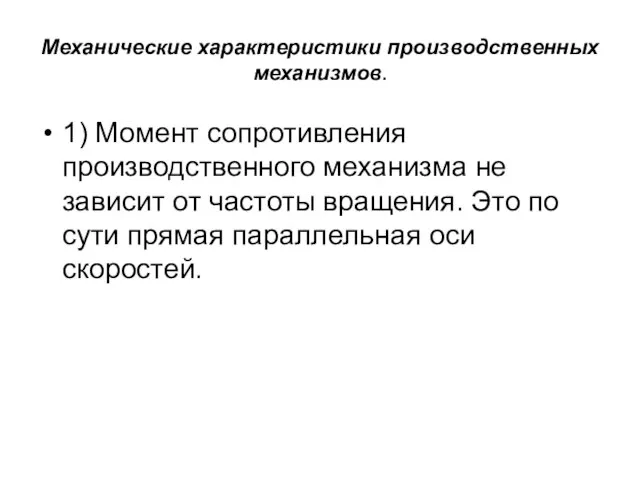
- 19. Механические характеристики производственных механизмов. 1) Момент сопротивления производственного механизма не зависит от частоты вращения. Это по
- 20. Рисунок
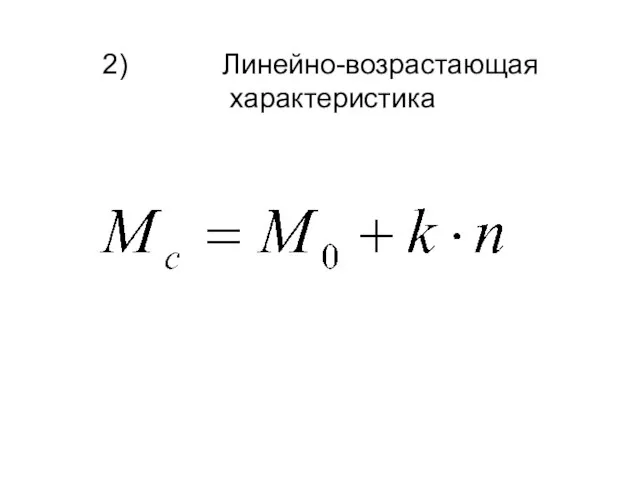
- 21. 2) Линейно-возрастающая характеристика
- 22. Рисунок
- 23. 3) Параболическая механическая характеристика
- 24. Рисунок
- 25. 4) Гиперболический вид характеристики.
- 26. Рисунок
- 27. Любая из приведенных механических характеристик может быть описана формулой:
- 28. где М0 – механический момент трогания производственного механизма, Мсн – номинальный момент сопротивления производственного механизма, n
- 29. Механические характеристики электрических двигателей. Все механические характеристики электрических двигателей бывают жесткие и мягкие. Абсолютно жесткой называется
- 31. Скачать презентацию
Слайд 2Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую энергию
Электропривод – это управляемая электромеханическая система. Её назначение – преобразовывать электрическую энергию
Слайд 3Блок-схема электропривода
Блок-схема электропривода
Слайд 4Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной
Электропривод (см.рисунок – это электромеханическая система, состоящая из электрической машины (ЭМ), связанной
Слайд 5В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических
В качестве СП рассматриваются силовые полупроводниковые преобразователи. Они выполняют, во-первых, согласование электрических
Слайд 6Электропривод имеет два канала – силовой и информационный (см. следующий рисунок ).
Электропривод имеет два канала – силовой и информационный (см. следующий рисунок ).
Слайд 7Общая структура электропривода
Общая структура электропривода
Слайд 8Силовой канал в свою очередь состоит из двух частей – электрической и
Силовой канал в свою очередь состоит из двух частей – электрической и
Слайд 9Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного
Слайд 101.2. Функции электропривода
Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след. рис.).
1.2. Функции электропривода
Рассмотрим подробнее силовой (энергетический) канал электропривода (см. след. рис.).
Слайд 11Энергетический канал электропривода
Энергетический канал электропривода
Слайд 12Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии,
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии,
Слайд 13Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U,
Электромеханический преобразователь ЭМП (двигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U,
Слайд 14Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном
Слайд 15В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери
В правильно организованной системе при управлении координатами (потоком энергии) должны минимизироваться потери
Слайд 16Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.) достаточно,
Даже беглого взгляда на структуру силовой части электропривода (см. предыдущий рис.) достаточно,
Слайд 17Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных объектов,
Во-первых, надо научиться работать с моделями реальных, как правило, очень сложных объектов,
Слайд 181.3. Механические характеристики производственных механизмов и электродвигателей
Различают механическую характеристику электродвигателя и
1.3. Механические характеристики производственных механизмов и электродвигателей
Различают механическую характеристику электродвигателя и
Слайд 19Механические характеристики производственных механизмов.
1) Момент сопротивления производственного механизма не зависит от частоты
Механические характеристики производственных механизмов.
1) Момент сопротивления производственного механизма не зависит от частоты
Слайд 20Рисунок
Рисунок
Слайд 212) Линейно-возрастающая характеристика
2) Линейно-возрастающая характеристика
Слайд 22
Рисунок
Рисунок
Слайд 233) Параболическая механическая характеристика
3) Параболическая механическая характеристика
Слайд 24
Рисунок
Рисунок
Слайд 254) Гиперболический вид характеристики.
4) Гиперболический вид характеристики.
Слайд 26
Рисунок
Рисунок
Слайд 27Любая из приведенных механических характеристик может быть описана формулой:
Любая из приведенных механических характеристик может быть описана формулой:
Слайд 28где М0 – механический момент трогания производственного механизма,
Мсн – номинальный момент сопротивления
где М0 – механический момент трогания производственного механизма,
Мсн – номинальный момент сопротивления
Слайд 29Механические характеристики электрических двигателей.
Все механические характеристики электрических двигателей бывают жесткие и мягкие.
Абсолютно
Механические характеристики электрических двигателей.
Все механические характеристики электрических двигателей бывают жесткие и мягкие.
Абсолютно
 Стан електронів у атомі
Стан електронів у атомі Электронный микроскоп
Электронный микроскоп Презентация на тему Иконография образа Пресвятой Богородицы
Презентация на тему Иконография образа Пресвятой Богородицы HOW OFTEN DO YOU EAT CAKES
HOW OFTEN DO YOU EAT CAKES Профильная комиссия экспертного совета Минздравсоцразвития «Урология»
Профильная комиссия экспертного совета Минздравсоцразвития «Урология» Кот в пальто
Кот в пальто Влияние изменения солнечной активностина напряженное состояние и геодинамику земной коры Урала Зубк
Влияние изменения солнечной активностина напряженное состояние и геодинамику земной коры Урала Зубк Проект по математике «Удивительное рядом»
Проект по математике «Удивительное рядом» AmadeusService Fee Manager
AmadeusService Fee Manager Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18
Улучшение технологического процесса изготовления шлангов ПЭ-32 SDR 18 Тест Местоимения
Тест Местоимения Многонациональные и однонациональные государства
Многонациональные и однонациональные государства Крещение (Богоявление)
Крещение (Богоявление) Административное право
Административное право Жестокое обращение с детьми
Жестокое обращение с детьми Элементы песочной терапии на логопедических занятиях. Логопедическая служба ГОУ ЦО «Школа здоровья
Элементы песочной терапии на логопедических занятиях. Логопедическая служба ГОУ ЦО «Школа здоровья Экологическое право
Экологическое право Реальность и фантазия в творчестве художника. 6 класс
Реальность и фантазия в творчестве художника. 6 класс Админская паранойя в быту или страшная криптографическая сказка для самых маленьких параноиков
Админская паранойя в быту или страшная криптографическая сказка для самых маленьких параноиков Образы "Слова о полку Игореве"
Образы "Слова о полку Игореве" Оборудование для измельчения и переработки шин
Оборудование для измельчения и переработки шин Структура и содержание образовательной деятельности
Структура и содержание образовательной деятельности Анималистический жанр. 7 клас
Анималистический жанр. 7 клас Актив. Экономика и финансы проекта
Актив. Экономика и финансы проекта Витамин Е
Витамин Е Информационная безопасность
Информационная безопасность Sustainable agriculture, forestry and fishery
Sustainable agriculture, forestry and fishery Практическая № 37-38
Практическая № 37-38