- Введение в разработку под Kinect

Содержание
- 2. WTF?!
- 3. Версии Kinect for Windows Коммерческая лицензия Оптимизирован для использования с компьютерами под управлением Windows Оптимизирован для
- 4. Устройство Kinect RGB камера 3D камера глубины (+ определение пользователя) Массив из 4х микрофонов Мотор изменения
- 5. Kinect SDKs OpenKinect SDK (Community) OpenNI Kinect SDK (PrimeSense) Kinect For Windows SDK (Microsoft)
- 6. Инициализация девайса Доступ к устройству осуществляется через коллекцию KinectSensor.KinectSensors. Пример получения доступа к первому устройству: var
- 7. RGB-камера RGB камера ИК-сенсор ИК-проектор
- 8. RGB-камера Поддерживаемые разрешения RGB 640x480 (30 FPS) RGB 1280x960 (12 FPS) YUV 640x480 (15 FPS) Данные
- 9. RGB-камера Демонстрация
- 10. Камера глубины
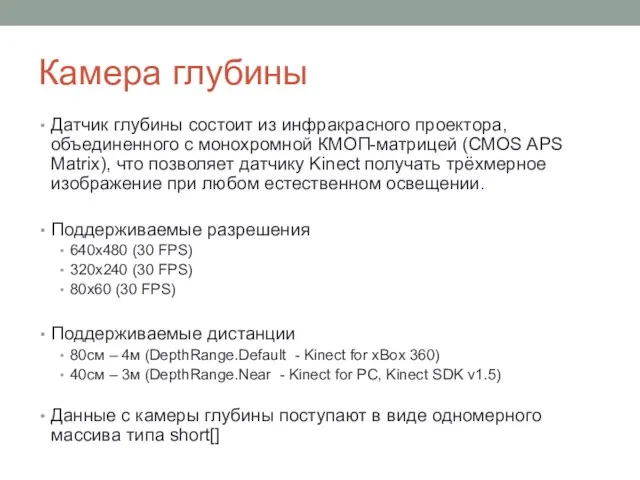
- 11. Камера глубины Датчик глубины состоит из инфракрасного проектора, объединенного с монохромной КМОП-матрицей (CMOS APS Matrix), что
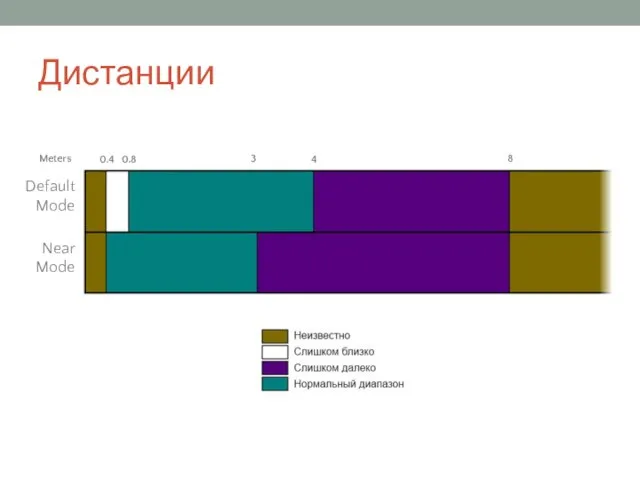
- 12. Дистанции 0.4 0.8 3 4 8 Default Mode Near Mode Meters
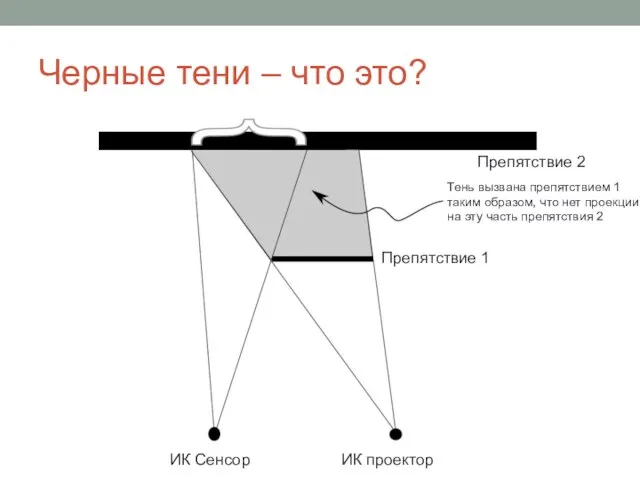
- 14. Черные тени – что это? ИК Сенсор ИК проектор Препятствие 2 Препятствие 1 Тень вызвана препятствием
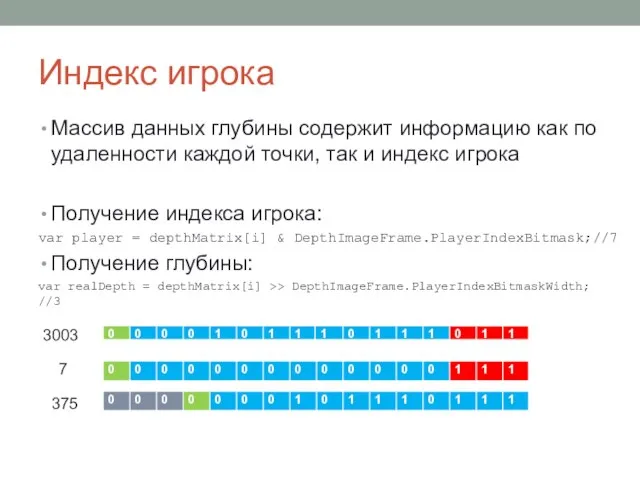
- 15. Индекс игрока Массив данных глубины содержит информацию как по удаленности каждой точки, так и индекс игрока
- 16. Камера глубины Демонстрация
- 17. Массив микрофонов
- 18. Массив микрофонов Микрофонная решетка позволяет производить локализацию источника звука и подавление шумов, что дает возможность говорить
- 19. Массив микрофонов Демонстрация
- 20. Мотор изменения угла наклона Kinect
- 21. Мотор изменения угла наклона Kinect Служит для изменения градуса наклона устройства Минимальный угол наклона -27 градусов;
- 22. Мотор изменения угла наклона Kinect Демонстрация
- 23. SkeletonFrame – собери меня полностью
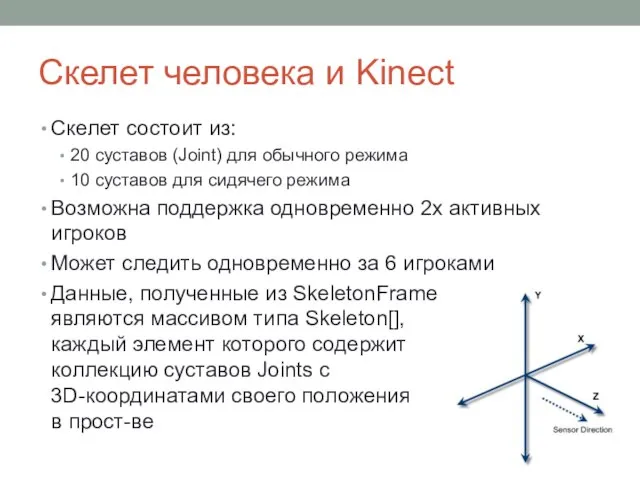
- 24. Скелет человека и Kinect Скелет состоит из: 20 суставов (Joint) для обычного режима 10 суставов для
- 25. Параметры сглаживания скелета Smoothing(сглаживание) – default 0.5 Correction(коррекция) – default 0.5 Prediction(прогнозирование) – default 0.5 JitterRadius(радиус
- 26. Позиционирование Класс DepthImageFrame содержит: DepthImagePoint MapFromSkeletonPoint(SkeletonPoint skeletonPoint) – позволяет получить координаты пикселя глубины из сустава скелета
- 27. SkeletonFrame Демонстрация
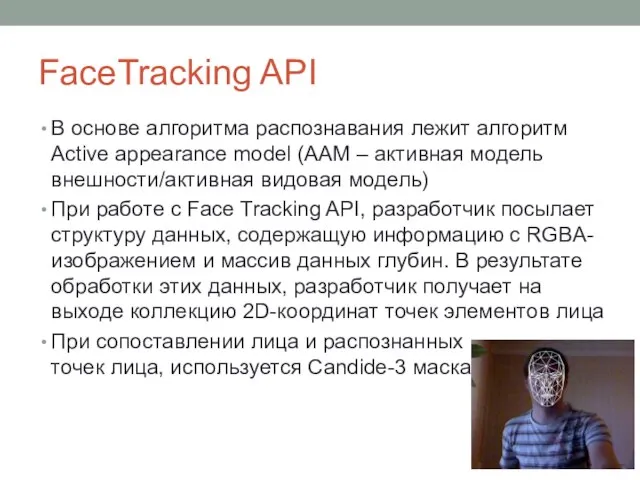
- 28. FaceTracking API В основе алгоритма распознавания лежит алгоритм Active appearance model (AAM – активная модель внешности/активная
- 29. FaceTracking API Демонстрация
- 30. Цена вопроса Kinect for Xbox 360 – $150 (~6 тыс. р.) Kinect for PC – $250
- 31. Источники http://kinectforwindows.org – портал для Kinect-разработчиков http://channel9.msdn.com/coding4fun/kinect – канал, посвященный Kinect http://channel9.msdn.com/Series/KinectQuickstart – краткое видео руководство
- 33. Скачать презентацию

Слайд 3Версии
Kinect for Windows
Коммерческая лицензия
Оптимизирован для использования с компьютерами под управлением Windows
Оптимизирован для
Версии
Kinect for Windows
Коммерческая лицензия
Оптимизирован для использования с компьютерами под управлением Windows
Оптимизирован для
Слайд 4Устройство Kinect
RGB камера
3D камера глубины
(+ определение пользователя)
Массив из 4х микрофонов
Мотор изменения наклона
Устройство Kinect
RGB камера
3D камера глубины
(+ определение пользователя)
Массив из 4х микрофонов
Мотор изменения наклона

Слайд 5Kinect SDKs
OpenKinect SDK (Community)
OpenNI Kinect SDK (PrimeSense)
Kinect For Windows SDK (Microsoft)
Kinect SDKs
OpenKinect SDK (Community)
OpenNI Kinect SDK (PrimeSense)
Kinect For Windows SDK (Microsoft)
Слайд 6Инициализация девайса
Доступ к устройству осуществляется через коллекцию KinectSensor.KinectSensors. Пример получения доступа к
Инициализация девайса
Доступ к устройству осуществляется через коллекцию KinectSensor.KinectSensors. Пример получения доступа к
Слайд 7RGB-камера
RGB камера
ИК-сенсор
ИК-проектор
RGB-камера
RGB камера
ИК-сенсор
ИК-проектор

Слайд 8RGB-камера
Поддерживаемые разрешения
RGB 640x480 (30 FPS)
RGB 1280x960 (12 FPS)
YUV 640x480 (15 FPS)
Данные с
RGB-камера
Поддерживаемые разрешения
RGB 640x480 (30 FPS)
RGB 1280x960 (12 FPS)
YUV 640x480 (15 FPS)
Данные с
Слайд 9RGB-камера
Демонстрация
RGB-камера
Демонстрация
Слайд 10Камера глубины
Камера глубины

Слайд 11Камера глубины
Датчик глубины состоит из инфракрасного проектора, объединенного с монохромной КМОП-матрицей (CMOS
Камера глубины
Датчик глубины состоит из инфракрасного проектора, объединенного с монохромной КМОП-матрицей (CMOS
Слайд 12Дистанции
0.4
0.8
3
4
8
Default
Mode
Near
Mode
Meters
Дистанции
0.4
0.8
3
4
8
Default
Mode
Near
Mode
Meters

Слайд 14Черные тени – что это?
ИК Сенсор
ИК проектор
Препятствие 2
Препятствие 1
Тень вызвана препятствием 1
таким
Черные тени – что это?
ИК Сенсор
ИК проектор
Препятствие 2
Препятствие 1
Тень вызвана препятствием 1 таким
Слайд 15Индекс игрока
Массив данных глубины содержит информацию как по удаленности каждой точки,
Индекс игрока
Массив данных глубины содержит информацию как по удаленности каждой точки,
Слайд 16Камера глубины
Демонстрация
Камера глубины
Демонстрация
Слайд 17Массив микрофонов
Массив микрофонов

Слайд 18Массив микрофонов
Микрофонная решетка позволяет производить локализацию источника звука и подавление шумов, что
Массив микрофонов
Микрофонная решетка позволяет производить локализацию источника звука и подавление шумов, что
Слайд 19Массив микрофонов
Демонстрация
Массив микрофонов
Демонстрация
Слайд 20Мотор изменения угла наклона Kinect
Мотор изменения угла наклона Kinect

Слайд 21Мотор изменения угла наклона Kinect
Служит для изменения градуса наклона устройства
Минимальный угол наклона
Мотор изменения угла наклона Kinect
Служит для изменения градуса наклона устройства
Минимальный угол наклона
Слайд 22Мотор изменения угла наклона Kinect
Демонстрация
Мотор изменения угла наклона Kinect
Демонстрация
Слайд 23SkeletonFrame – собери меня полностью
SkeletonFrame – собери меня полностью

Слайд 24Скелет человека и Kinect
Скелет состоит из:
20 суставов (Joint) для обычного режима
10 суставов
Скелет человека и Kinect
Скелет состоит из:
20 суставов (Joint) для обычного режима
10 суставов
Слайд 25Параметры сглаживания скелета
Smoothing(сглаживание) – default 0.5
Correction(коррекция) – default 0.5
Prediction(прогнозирование) – default 0.5
JitterRadius(радиус
Параметры сглаживания скелета
Smoothing(сглаживание) – default 0.5
Correction(коррекция) – default 0.5
Prediction(прогнозирование) – default 0.5
JitterRadius(радиус
Слайд 26Позиционирование
Класс DepthImageFrame содержит:
DepthImagePoint MapFromSkeletonPoint(SkeletonPoint skeletonPoint) – позволяет получить координаты пикселя глубины из
Позиционирование
Класс DepthImageFrame содержит:
DepthImagePoint MapFromSkeletonPoint(SkeletonPoint skeletonPoint) – позволяет получить координаты пикселя глубины из
Слайд 27SkeletonFrame
Демонстрация
SkeletonFrame
Демонстрация
Слайд 28FaceTracking API
В основе алгоритма распознавания лежит алгоритм Active appearance model (AAM –
FaceTracking API
В основе алгоритма распознавания лежит алгоритм Active appearance model (AAM –
Слайд 29FaceTracking API
Демонстрация
FaceTracking API
Демонстрация
Слайд 30Цена вопроса
Kinect for Xbox 360 – $150 (~6 тыс. р.)
Kinect for PC
Цена вопроса
Kinect for Xbox 360 – $150 (~6 тыс. р.)
Kinect for PC
Слайд 31Источники
http://kinectforwindows.org – портал для Kinect-разработчиков
http://channel9.msdn.com/coding4fun/kinect – канал, посвященный Kinect
http://channel9.msdn.com/Series/KinectQuickstart – краткое видео
Источники
http://kinectforwindows.org – портал для Kinect-разработчиков
http://channel9.msdn.com/coding4fun/kinect – канал, посвященный Kinect
http://channel9.msdn.com/Series/KinectQuickstart – краткое видео
 Реклама во Франции. Глазкова 22.04.2019
Реклама во Франции. Глазкова 22.04.2019 ПРЕЗЕНТАЦИЯ КУРСОВОЙ
ПРЕЗЕНТАЦИЯ КУРСОВОЙ Как я провела этот год
Как я провела этот год Препараты гормонов, их синтетических заменителей
Препараты гормонов, их синтетических заменителей  Ценим Ваше время!
Ценим Ваше время! Балльно-рейтинговая система на Образовательном портале ОмГПУ
Балльно-рейтинговая система на Образовательном портале ОмГПУ Описание системы
Описание системы ИЗМЕНЕНИЯ В ПЛАНЕ РАЗВИТИЯ 2011 Для Агентов Казахстана.
ИЗМЕНЕНИЯ В ПЛАНЕ РАЗВИТИЯ 2011 Для Агентов Казахстана. Преобразование вида и состава изображений. Графическая работа
Преобразование вида и состава изображений. Графическая работа Создание презентаций
Создание презентаций Школа родительского мастерства. Решение конфликтов
Школа родительского мастерства. Решение конфликтов БАНКОВСКИЙ СЕКТОР НА ФОНДОВОМ РЫНКЕ РФ
БАНКОВСКИЙ СЕКТОР НА ФОНДОВОМ РЫНКЕ РФ Схема микроразмножения
Схема микроразмножения Трансакционные издержки
Трансакционные издержки Строительная геотехнология
Строительная геотехнология ОПЫТ ВНЕДРЕНИЯ ИНДУСТРИАЛЬНОЙ МОДЕЛИ УПРАВЛЕНИЯ КАЧЕСТВОМ МЕДИЦИНСКОЙ ПОМОЩИВ МНОГОПРОФИЛЬНОЙ БОЛЬНИЦЕ (антикризисное управле
ОПЫТ ВНЕДРЕНИЯ ИНДУСТРИАЛЬНОЙ МОДЕЛИ УПРАВЛЕНИЯ КАЧЕСТВОМ МЕДИЦИНСКОЙ ПОМОЩИВ МНОГОПРОФИЛЬНОЙ БОЛЬНИЦЕ (антикризисное управле Первые русские князья
Первые русские князья Лекция на тему: Физиологические основы применения азотных удобрений
Лекция на тему: Физиологические основы применения азотных удобрений Корпоративная социальная ответственность как основа надежного бренда на примере компании «Балтика»
Корпоративная социальная ответственность как основа надежного бренда на примере компании «Балтика» Пасха Красная
Пасха Красная Астафьев «Капалуха»
Астафьев «Капалуха» Развитие коммуникативной культуры учащихся на уроках немецкого языка и во внеклассной работе.
Развитие коммуникативной культуры учащихся на уроках немецкого языка и во внеклассной работе. Рождение феодального общества у древних славян.
Рождение феодального общества у древних славян. Ержан ағай слайд дайын
Ержан ағай слайд дайын Имя освещает жизненный путь человека
Имя освещает жизненный путь человека Общественное здоровье и организация здравоохранения
Общественное здоровье и организация здравоохранения  Породы Собак
Породы Собак 209n-изменение косгу
209n-изменение косгу