- Замкнутые системы электропривода, классификация обратных связей

Содержание
- 2. Замкнутые структуры ЭП строятся по принципу компенсации внешних возмущений и принципу отклонения, называемому также принципом обратной
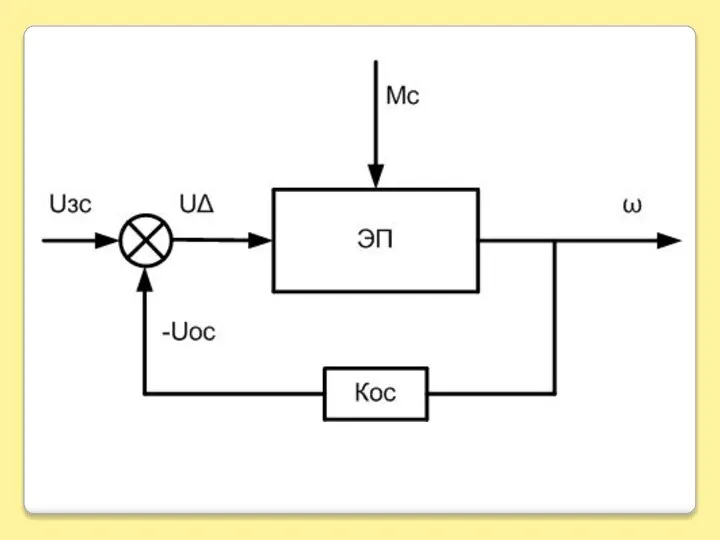
- 4. В данном случае при регулировании скорости используется цепь обратной связи, по которой информация о текущем значении
- 5. Управление осуществляется сигналом отклонения ΔU= Uзс -Uoc (его также называют сигналом рассогласования или ошибки), который при
- 6. При необходимости регулирования других координат ЭП или рабочей машины используются обратные связи по этим координатам.
- 7. Обратная связь соединяет выход ЭП с его входом. Все применяемые в замкнутом ЭП обратные связи делятся
- 8. Положительной называется такая обратная связь, сигнал которой направлен согласно (т.е. складывается) с задающим сигналом. Сигнал же
- 9. Для линейной обратной связи характерна пропорциональная зависимость между регулируемой координатой и сигналом обратной связи Uос, при
- 10. Жесткая обратная связь действует как в установившемся, так и переходном режимах ЭП. Сигнал гибкой обратной связи
- 11. В зависимости от вида регулируемой координаты в ЭП используются связи 1.по скорости, 2.положению, 3.току, напряжению, 4.магнитному
- 15. Характеристики разомкнутых ЭП, построенных по системе «преобразователь-двигатель» (П - Д), имеют относительно невысокую жесткость из-за влияния
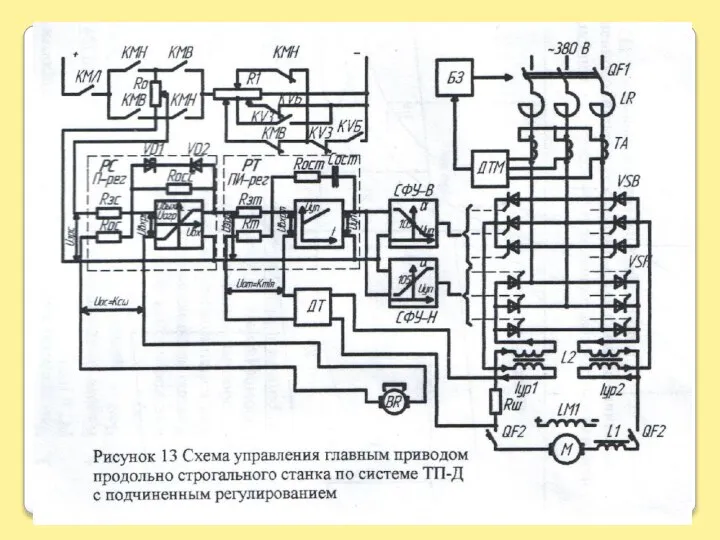
- 16. Для получения значительных диапазонов и высокой точности регулирования скорости требуются более жесткие характеристики, которые возможно обеспечить
- 18. Скачать презентацию
Слайд 2 Замкнутые структуры ЭП строятся по принципу компенсации внешних возмущений и принципу отклонения,
Замкнутые структуры ЭП строятся по принципу компенсации внешних возмущений и принципу отклонения,
Слайд 4 В данном случае при регулировании скорости используется цепь обратной связи, по которой
В данном случае при регулировании скорости используется цепь обратной связи, по которой
Слайд 5 Управление осуществляется сигналом отклонения ΔU= Uзс -Uoc (его также называют сигналом рассогласования
Управление осуществляется сигналом отклонения ΔU= Uзс -Uoc (его также называют сигналом рассогласования
Слайд 6 При необходимости регулирования других координат ЭП или рабочей машины используются обратные связи
При необходимости регулирования других координат ЭП или рабочей машины используются обратные связи

Слайд 7 Обратная связь соединяет выход ЭП с его входом.
Все применяемые в замкнутом
Обратная связь соединяет выход ЭП с его входом.
Все применяемые в замкнутом
Слайд 8 Положительной называется такая обратная связь, сигнал которой направлен согласно (т.е. складывается) с
Положительной называется такая обратная связь, сигнал которой направлен согласно (т.е. складывается) с
Слайд 9 Для линейной обратной связи характерна пропорциональная зависимость между регулируемой координатой и сигналом
Для линейной обратной связи характерна пропорциональная зависимость между регулируемой координатой и сигналом
Слайд 10 Жесткая обратная связь действует как в установившемся, так и переходном режимах ЭП.
Жесткая обратная связь действует как в установившемся, так и переходном режимах ЭП.
Слайд 11 В зависимости от вида регулируемой координаты в ЭП используются связи
1.по скорости,
В зависимости от вида регулируемой координаты в ЭП используются связи
1.по скорости,

Слайд 15 Характеристики разомкнутых ЭП, построенных по системе «преобразователь-двигатель» (П - Д), имеют относительно
Характеристики разомкнутых ЭП, построенных по системе «преобразователь-двигатель» (П - Д), имеют относительно
Слайд 16Для получения значительных диапазонов и высокой точности регулирования скорости требуются более жесткие
Для получения значительных диапазонов и высокой точности регулирования скорости требуются более жесткие
 Этюд. Построение мебели. 8 тема
Этюд. Построение мебели. 8 тема Комплексная программаинформационно-аналитическогосопровождения тестирования студентовi-exam.ru
Комплексная программаинформационно-аналитическогосопровождения тестирования студентовi-exam.ru ВКР: Совершенствование активных методов обслуживания покупателей в магазине
ВКР: Совершенствование активных методов обслуживания покупателей в магазине Развитие методов синтеза, исследование физико-химических и электрофизических свойств модифицированных наноуглеродных и фторугл
Развитие методов синтеза, исследование физико-химических и электрофизических свойств модифицированных наноуглеродных и фторугл Операционная деятельность в логистике. ПОЧУ Улан-Удэнский торгово-экономический техникум. Егорова Юлия
Операционная деятельность в логистике. ПОЧУ Улан-Удэнский торгово-экономический техникум. Егорова Юлия Социально-образовательный проект «Телецентр. Школьные новости»
Социально-образовательный проект «Телецентр. Школьные новости» Как писать жи - ши, ча - ща, чу - щу, чк - чн - нч - нщ?
Как писать жи - ши, ча - ща, чу - щу, чк - чн - нч - нщ? Логика
Логика Презентация на тему Стенокардия
Презентация на тему Стенокардия  Автоматическая энергосберегающая система освещения Automatic Energy Saving Lighting System
Автоматическая энергосберегающая система освещения Automatic Energy Saving Lighting System Как использовать в измерении социальных медиа практику смежных отраслей?
Как использовать в измерении социальных медиа практику смежных отраслей? Constitution Act, 1982
Constitution Act, 1982 Тема 5. Манипулятивные игры как форма социальной активности индивида
Тема 5. Манипулятивные игры как форма социальной активности индивида Воспитание 2005
Воспитание 2005 Группа поддержки спортивных команд GERBERA
Группа поддержки спортивных команд GERBERA Работа с корпорациями
Работа с корпорациями Как выполнить чертёж Брусок /стойка/. 10, 11 класс
Как выполнить чертёж Брусок /стойка/. 10, 11 класс Нематериальные активы – скрытые резервы бизнеса: ценности как источник стоимости
Нематериальные активы – скрытые резервы бизнеса: ценности как источник стоимости Виды ответственности за невыполнение нормативных правовых актов по охране труда
Виды ответственности за невыполнение нормативных правовых актов по охране труда Запись простого линейного алгоритма для формального исполнителя
Запись простого линейного алгоритма для формального исполнителя Обезьяны.
Обезьяны. Управление учебным процессом
Управление учебным процессом Макаронные изделия Makfa. Акция
Макаронные изделия Makfa. Акция Художественные промыслы Нижегородской области
Художественные промыслы Нижегородской области Золотое кольцо России город СУЗДАЛЬ
Золотое кольцо России город СУЗДАЛЬ Типы икон Богородицы
Типы икон Богородицы Диалог консультанта и клиента на примере практического случая
Диалог консультанта и клиента на примере практического случая Презентация на тему Отряд Крокодилы
Презентация на тему Отряд Крокодилы