- Автоматические лебедки на судах

Содержание
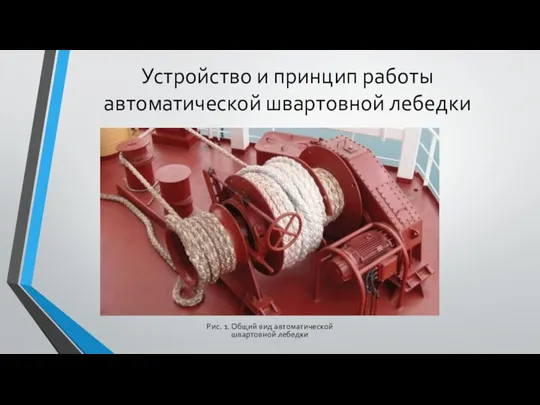
- 2. Устройство и принцип работы автоматической швартовной лебедки Рис. 1. Общий вид автоматической швартовной лебедки
- 3. Автоматические швартовные лебедки необходимы для поддержания заданного уровня швартовного режима судна при необходимой безопасности стоянки и
- 4. Особенностью механизма лебедки как системы авторегулирования заключается в натяжении (ослаблении) швартовного каната, это является возмущающим фактором
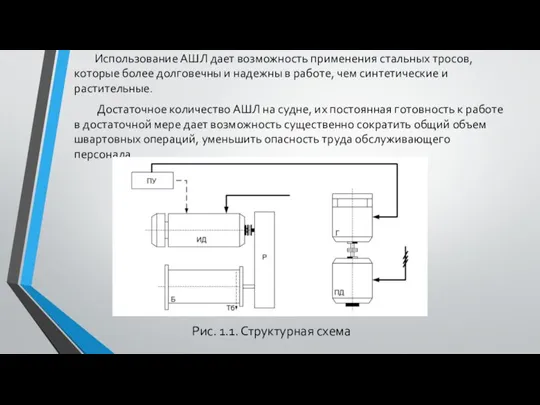
- 5. Использование АШЛ дает возможность применения стальных тросов, которые более долговечны и надежны в работе, чем синтетические
- 6. Например, фирма АСЕА комплектует некоторые системы с двухцепными эсператорами, это предусматривает обслуживание приводов сразу двух лебедок.
- 7. Автоматические швартовные лебедки, используемые на современных морских и речных судах по принципу измерения натяжения (усилия) на
- 8. Автоматическое управление электрической буксирной лебедки.
- 9. Обслуживают буксирное устройство судна, предназначены для надежного удержания троса при буксировке судна и быстрого изменения расстояния
- 10. Правилами Регистра РФ предписывается возможность работы буксирной лебедки в режимах ручного и автоматического управления. Должен быть
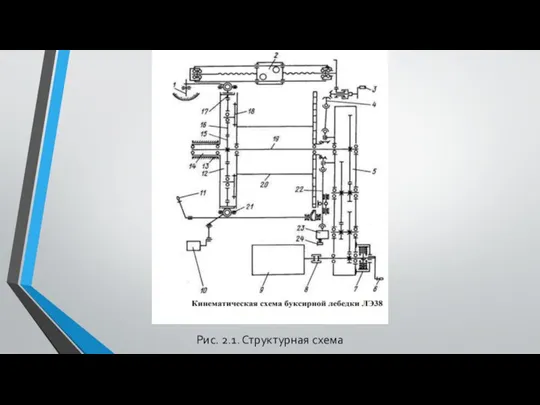
- 11. Рис. 2.1. Структурная схема
- 12. Приводной электродвигатель 9 соединен зубчатой муфтой 8 с ведущим валом редуктора 5. На противоположном консольном конце
- 13. Отключение буксирного барабана от механизма лебедки достигается расслаблением фрикционной ленты пружинного датчика 21, который состоит из
- 14. Он обеспечивает также снижение скорости травления, подачу светового сигнала после стравливания 35 м буксирного каната и
- 15. Равномерная укладка буксирного каната на барабане осуществляется канатоукладчиком 2, который приводится валиковым приводом 4 с коническими
- 16. Требования Регистра к буксирному устройству Для судов неограниченного района плавания длина и разрывное усилие буксирного троса
- 18. Скачать презентацию
Слайд 2Устройство и принцип работы автоматической швартовной лебедки
Рис. 1. Общий вид автоматической швартовной
Устройство и принцип работы автоматической швартовной лебедки
Рис. 1. Общий вид автоматической швартовной
Слайд 3 Автоматические швартовные лебедки необходимы для поддержания заданного уровня швартовного режима судна при
Автоматические швартовные лебедки необходимы для поддержания заданного уровня швартовного режима судна при
Слайд 4 Особенностью механизма лебедки как системы авторегулирования заключается в натяжении (ослаблении) швартовного каната,
Особенностью механизма лебедки как системы авторегулирования заключается в натяжении (ослаблении) швартовного каната,
Слайд 5 Использование АШЛ дает возможность применения стальных тросов, которые более долговечны и надежны
Использование АШЛ дает возможность применения стальных тросов, которые более долговечны и надежны
Слайд 6 Например, фирма АСЕА комплектует некоторые системы с двухцепными эсператорами, это предусматривает обслуживание
Например, фирма АСЕА комплектует некоторые системы с двухцепными эсператорами, это предусматривает обслуживание
Слайд 7 Автоматические швартовные лебедки, используемые на современных морских и речных судах по принципу
Автоматические швартовные лебедки, используемые на современных морских и речных судах по принципу
Слайд 8Автоматическое управление электрической буксирной лебедки.
Автоматическое управление электрической буксирной лебедки.

Слайд 9 Обслуживают буксирное устройство судна, предназначены для надежного удержания троса при буксировке судна
Обслуживают буксирное устройство судна, предназначены для надежного удержания троса при буксировке судна
Слайд 10 Правилами Регистра РФ предписывается возможность работы буксирной лебедки в режимах ручного и
Правилами Регистра РФ предписывается возможность работы буксирной лебедки в режимах ручного и
Слайд 11Рис. 2.1. Структурная схема
Рис. 2.1. Структурная схема
Слайд 12 Приводной электродвигатель 9 соединен зубчатой муфтой 8 с ведущим валом редуктора 5.
Приводной электродвигатель 9 соединен зубчатой муфтой 8 с ведущим валом редуктора 5.
Слайд 13 Отключение буксирного барабана от механизма лебедки достигается расслаблением фрикционной ленты пружинного датчика
Отключение буксирного барабана от механизма лебедки достигается расслаблением фрикционной ленты пружинного датчика
Слайд 14 Он обеспечивает также снижение скорости травления, подачу светового сигнала после стравливания 35
Он обеспечивает также снижение скорости травления, подачу светового сигнала после стравливания 35
Слайд 15 Равномерная укладка буксирного каната на барабане осуществляется канатоукладчиком 2, который приводится валиковым
Равномерная укладка буксирного каната на барабане осуществляется канатоукладчиком 2, который приводится валиковым
Слайд 16Требования Регистра к буксирному устройству
Для судов неограниченного района плавания длина и разрывное
Требования Регистра к буксирному устройству
Для судов неограниченного района плавания длина и разрывное
 Энергия топлива. Удельная теплота сгорания
Энергия топлива. Удельная теплота сгорания Двигатель FAW CA4DF3
Двигатель FAW CA4DF3 Газовые законы
Газовые законы Закон сохранения импульса. Реактивное движение
Закон сохранения импульса. Реактивное движение zakony_Nyutona
zakony_Nyutona Математичне моделювання електричних кіл. Обчислення резистивних схем за матричним описання електротехнічної схеми
Математичне моделювання електричних кіл. Обчислення резистивних схем за матричним описання електротехнічної схеми Механическое движение
Механическое движение Презентация на тему Последовательное и параллельное соединения проводников
Презентация на тему Последовательное и параллельное соединения проводников  Световые волны. Дисперсия. Интерференция
Световые волны. Дисперсия. Интерференция Действие электрического тока на человека Урок по физике 8 класс Учителя МОУ СОШ №1 г.Миньяра Лактионовой Надежды Сергеевны
Действие электрического тока на человека Урок по физике 8 класс Учителя МОУ СОШ №1 г.Миньяра Лактионовой Надежды Сергеевны Презентация на тему Сила упрогости
Презентация на тему Сила упрогости  Все загадки света. Оптика
Все загадки света. Оптика Исследование влияния начальной погиби на вибрационные свойства и устойчивость обшивки
Исследование влияния начальной погиби на вибрационные свойства и устойчивость обшивки Презентация на тему Световые явления
Презентация на тему Световые явления  Колебания систем со многими степенями свободы
Колебания систем со многими степенями свободы Что такое антивещество
Что такое антивещество Равноускоренное движение. Ускорение
Равноускоренное движение. Ускорение Демонтаж приборов электрооборудования автомобиля
Демонтаж приборов электрооборудования автомобиля Система охлаждения двигателя внутреннего сгорания с заданными значениями
Система охлаждения двигателя внутреннего сгорания с заданными значениями Организация проектно-исследовательской деятельности на уроках физики как путь к формированию ключевых компетенций
Организация проектно-исследовательской деятельности на уроках физики как путь к формированию ключевых компетенций b7f6f975-44e0-491e-b543-6ce55d215b44
b7f6f975-44e0-491e-b543-6ce55d215b44 Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Гидродинамика
Гидродинамика Презентация на тему Вычисление массы и объема тела
Презентация на тему Вычисление массы и объема тела  Реактивные самолёты
Реактивные самолёты Агрегатные состояния вещества. Строение твердых, жидких и газообразных тел Урок в 7 классе Учитель физики МОУ «СОШ
Агрегатные состояния вещества. Строение твердых, жидких и газообразных тел Урок в 7 классе Учитель физики МОУ «СОШ  Методологические основы и структура научного познания. Лекция №1
Методологические основы и структура научного познания. Лекция №1 Внешний фотоэффект. Изучение законов внешнего фотоэффекта
Внешний фотоэффект. Изучение законов внешнего фотоэффекта