- Автоматическое управление. Типовая упрощенная структура САУ

Содержание
- 2. Литература 1. Куропаткин П.В. Теория автоматического управления. - М.: Высшая школа, 1973. - 507 с. 2.
- 3. Лабораторные работы Методичка. Развёрнутый лист в клеточку. Линейка или прямоугольный треугольник (равнобедренный с углами 45 °).
- 4. Автоматическим управлением называется процесс поддержания или изменения по заданному закону значений показателей какого-либо процесса за счет
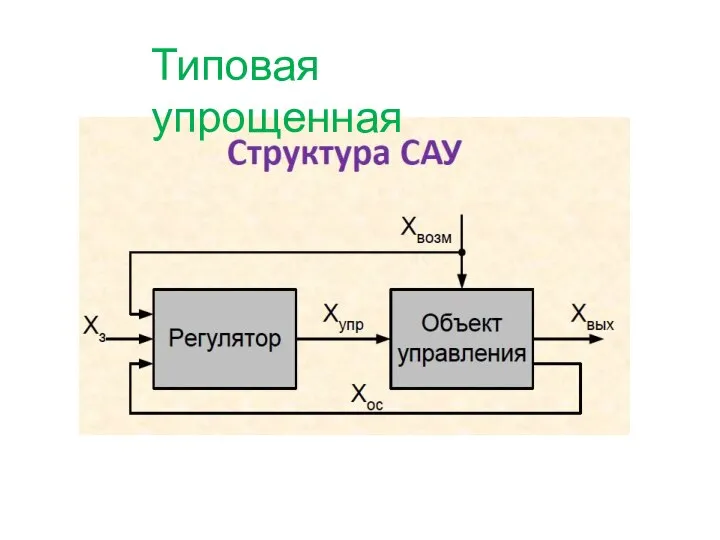
- 5. Типовая упрощенная
- 6. Отклонение регулируемой величины от заданного значения происходит под действием различных причин или, как их называют в
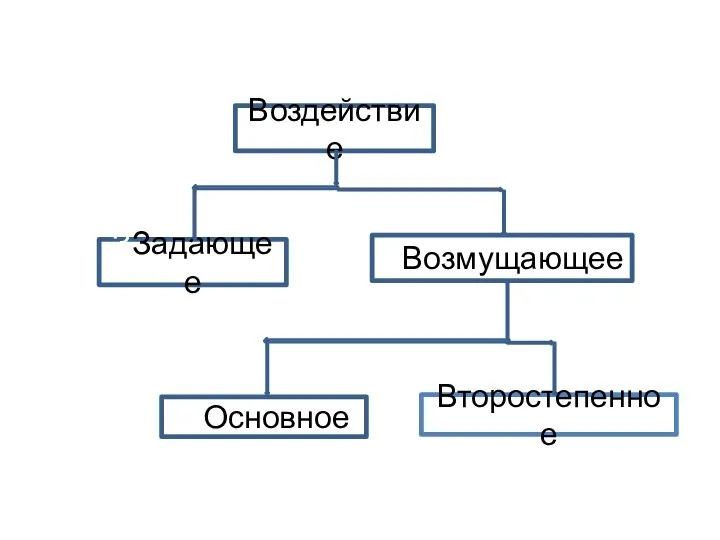
- 7. Воздействие ЗЗадающее ВВозмущающее ООсновное Второстепенное
- 8. Характер переходных процессов в результате приложенного к системе воздействия зависит главным образом от структуры и свойств
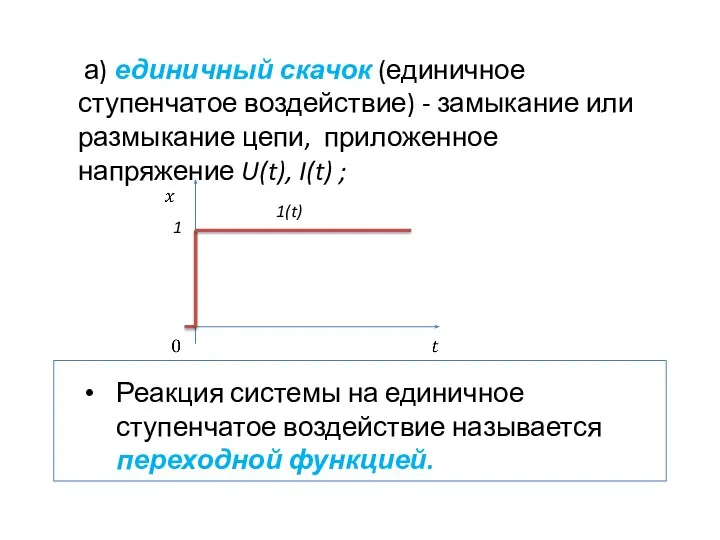
- 9. а) единичный скачок (единичное ступенчатое воздействие) - замыкание или размыкание цепи, приложенное напряжение U(t), I(t) ;
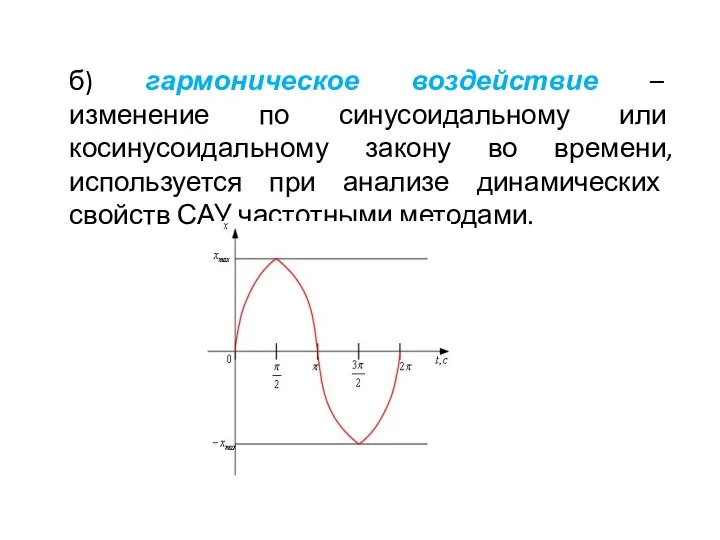
- 10. б) гармоническое воздействие – изменение по синусоидальному или косинусоидальному закону во времени, используется при анализе динамических
- 11. 2 Обратные связи Задача САУ - обеспечить процесс поддержания или изменения по заданному закону значений показателей
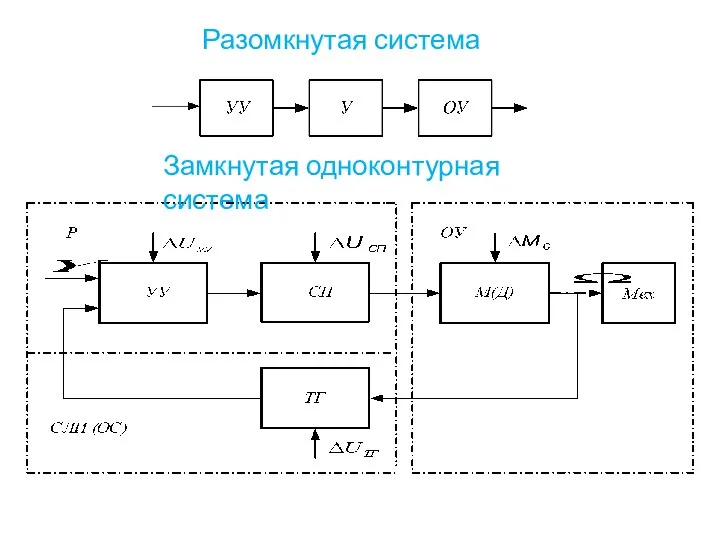
- 12. Разомкнутая система Замкнутая одноконтурная система
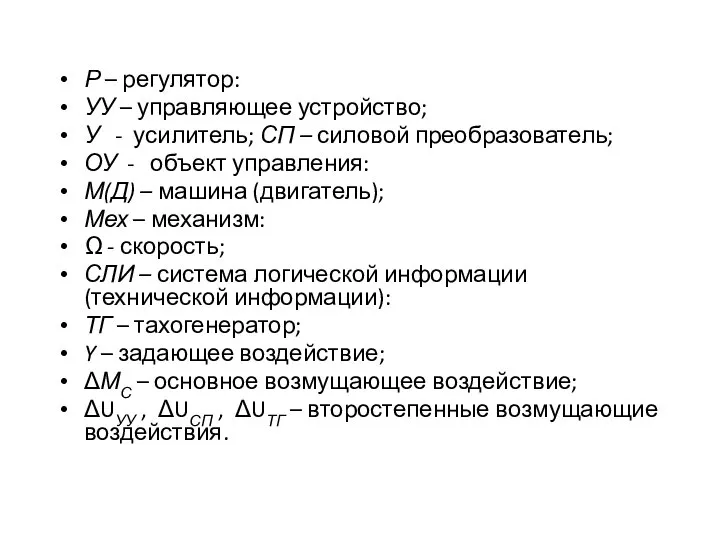
- 13. Р – регулятор: УУ – управляющее устройство; У - усилитель; СП – силовой преобразователь; ОУ -
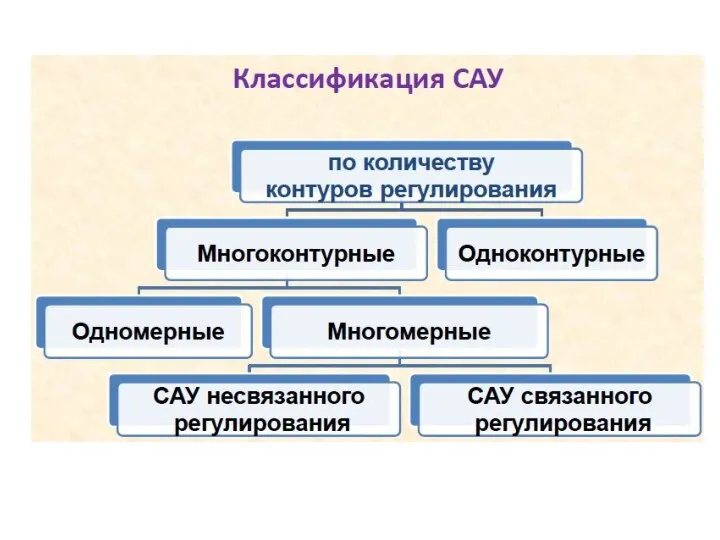
- 14. Системы, имеющие одну главную обратную связь, называются одноконтурными. Некоторые САУ, помимо главных ОС, число которых определяется
- 15. В зависимости от характера передаваемого воздействия О.С. подразделяются на жесткие и гибкие. Жесткие обратные связи действуют
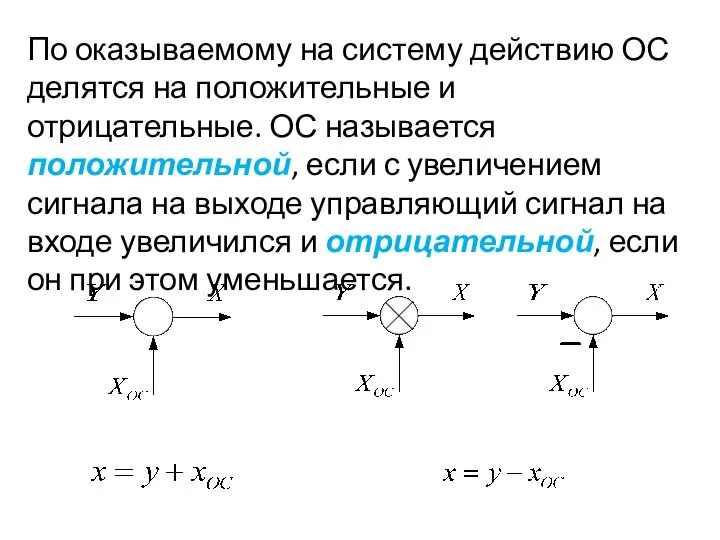
- 16. По оказываемому на систему действию ОС делятся на положительные и отрицательные. ОС называется положительной, если с
- 25. Операторный метод Сущность операторного метода заключается в том, что расчет переходного процесса переносится из области функций
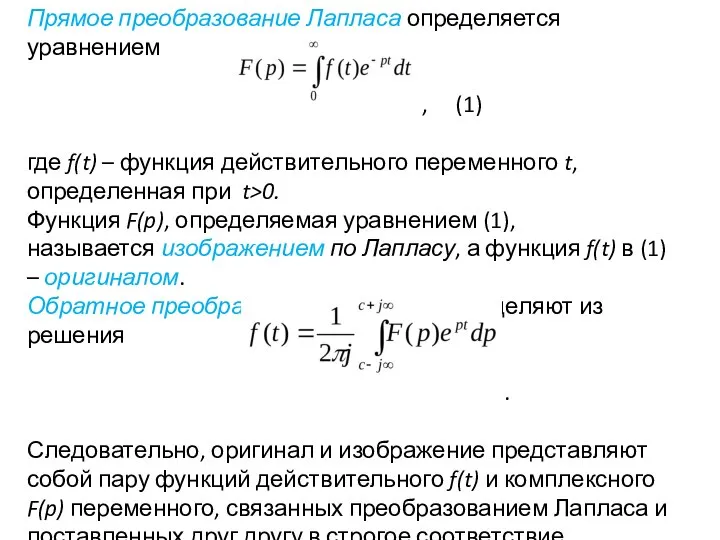
- 26. Прямое преобразование Лапласа определяется уравнением , (1) где f(t) – функция действительного переменного t, определенная при
- 27. Для сокращения записи преобразований (1) используют следующую символику: , где L – оператор Лапласа. В дальнейшем
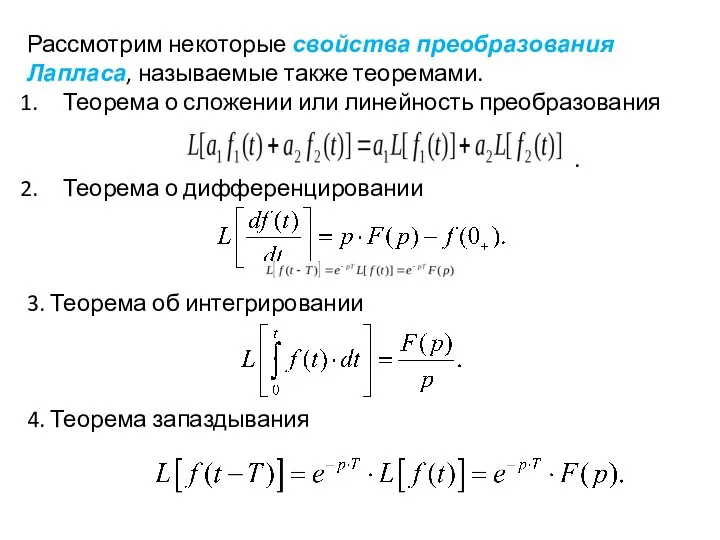
- 29. Рассмотрим некоторые свойства преобразования Лапласа, называемые также теоремами. Теорема о сложении или линейность преобразования . Теорема
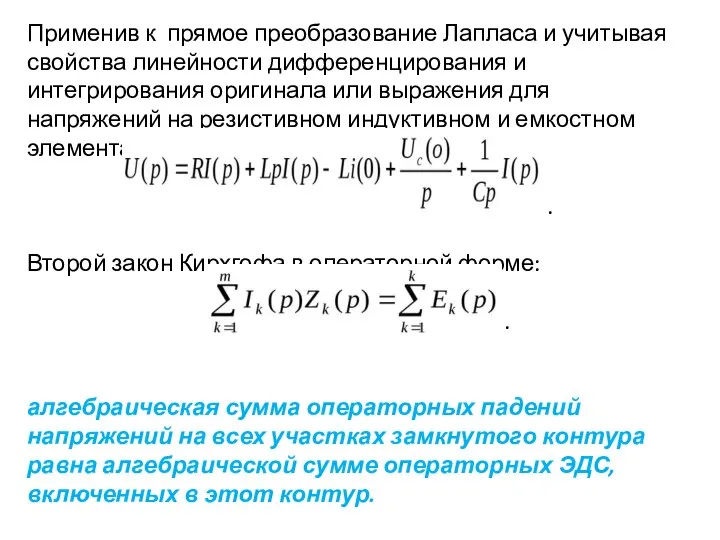
- 30. Пользуясь основными свойствами преобразования Лапласа, можно получить основные законы теории цепей в операторной форме. Рассмотрим, например,
- 31. Применив к прямое преобразование Лапласа и учитывая свойства линейности дифференцирования и интегрирования оригинала или выражения для
- 32. Алгоритм анализа переходных процессов операторным методом. Расчет переходного процесса операторным методом предусматривает следующий порядок операций: -
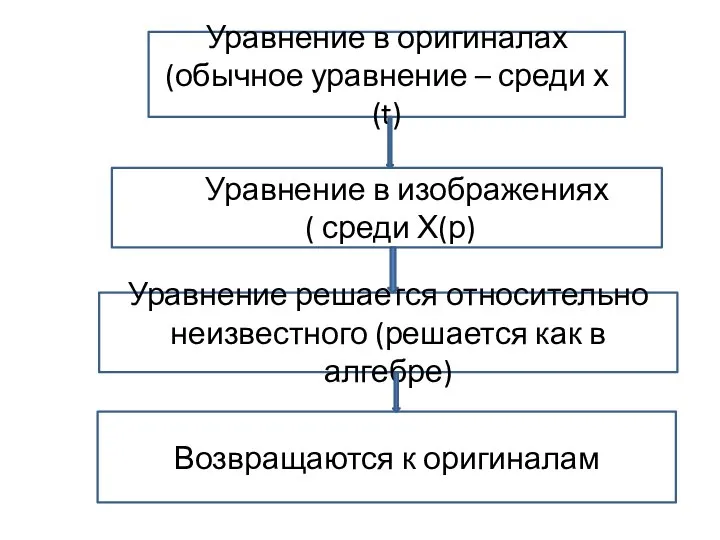
- 33. Уравнение в оригиналах (обычное уравнение – среди х(t) УУУравнение в изображениях ( среди Х(р) Уравнение решается
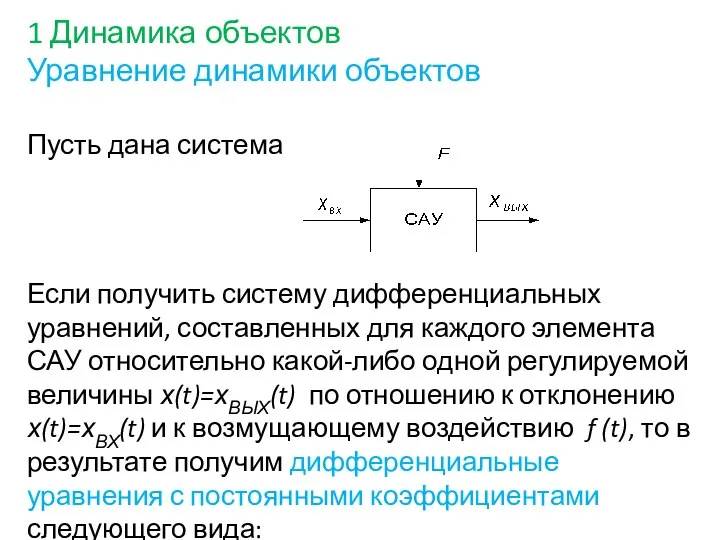
- 34. 1 Динамика объектов Уравнение динамики объектов Пусть дана система Если получить систему дифференциальных уравнений, составленных для
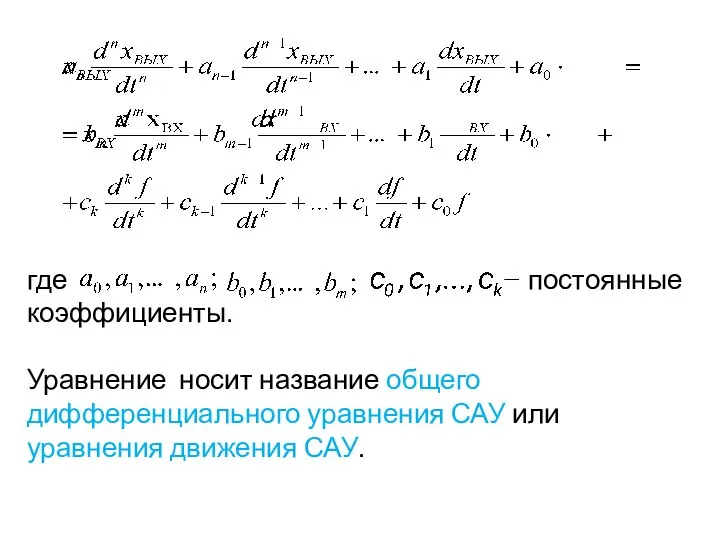
- 35. где − постоянные коэффициенты. Уравнение носит название общего дифференциального уравнения САУ или уравнения движения САУ.
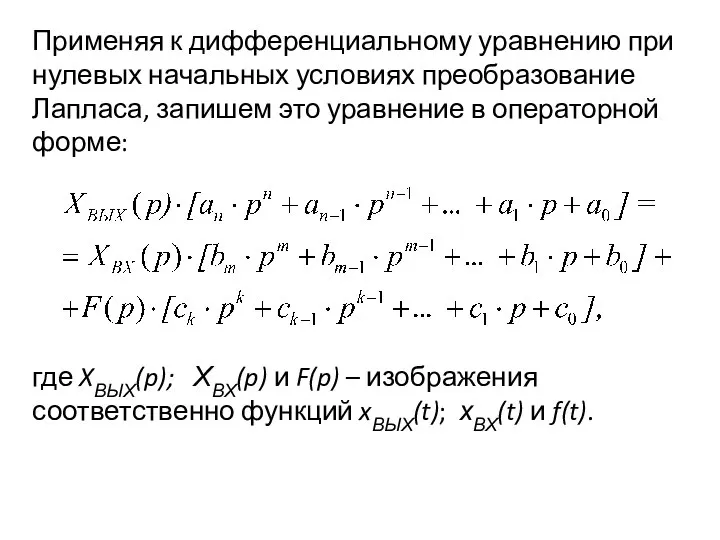
- 36. Применяя к дифференциальному уравнению при нулевых начальных условиях преобразование Лапласа, запишем это уравнение в операторной форме:
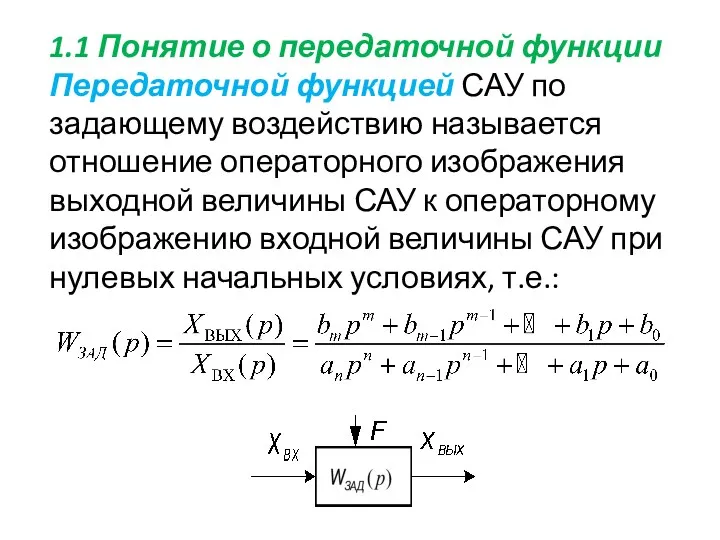
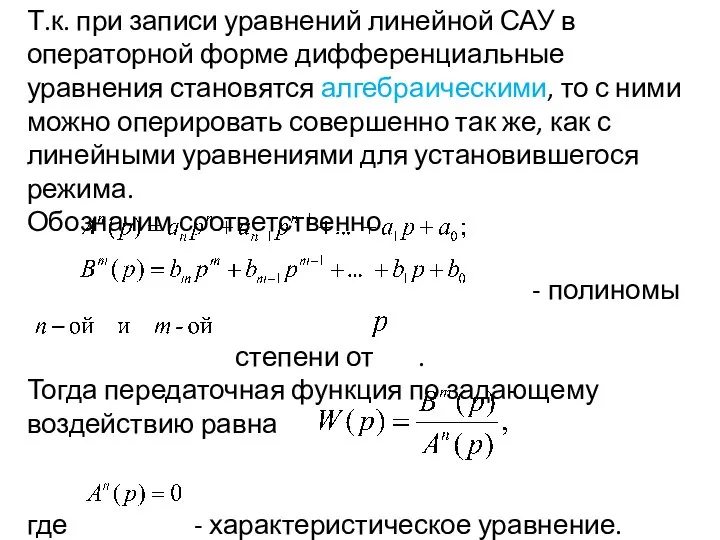
- 37. 1.1 Понятие о передаточной функции Передаточной функцией САУ по задающему воздействию называется отношение операторного изображения выходной
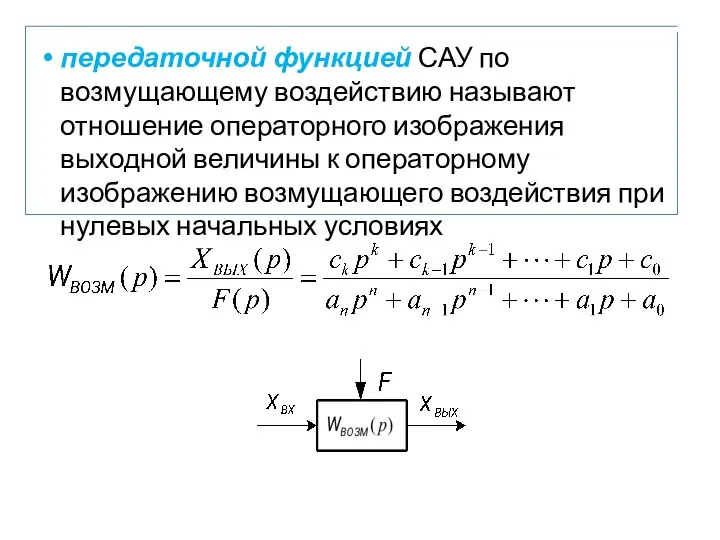
- 38. передаточной функцией САУ по возмущающему воздействию называют отношение операторного изображения выходной величины к операторному изображению возмущающего
- 39. Т.к. при записи уравнений линейной САУ в операторной форме дифференциальные уравнения становятся алгебраическими, то с ними
- 40. Найдём переходную функцию при входном единичном ступенчатом воздействии хВХ(t)=1(t) , тогда ХВХ(р)= . . Вычислим Перейдём
- 41. 1.2 Частотные характеристики
- 42. Совместное изменение амплитуды и фазы выходной величины от частоты можно получить, если представить синусоидальные функции в
- 43. Комплексная функция W(jω) называется комплексным коэффициентом передачи САУ или амплитудно-фазовой частотной характеристикой (АФЧХ) САУ. Модуль этой
- 44. Между собой ВЧХ, МЧХ и АЧХ, ФЧХ связаны
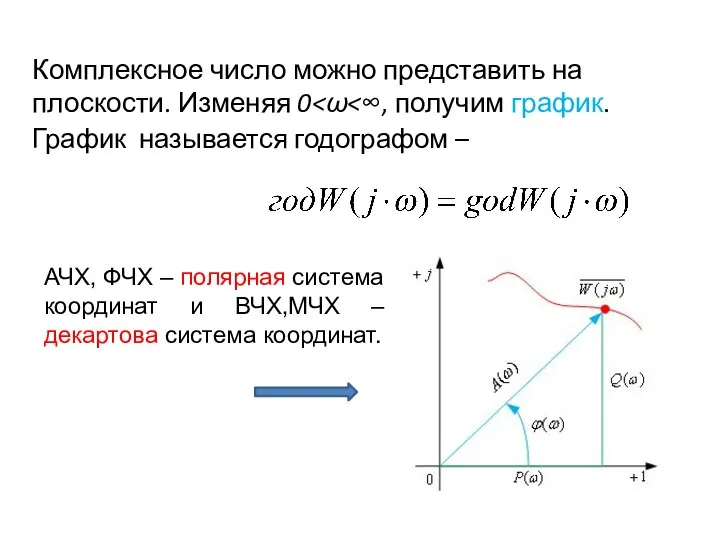
- 45. График называется годографом – АЧХ, ФЧХ – полярная система координат и ВЧХ,МЧХ – декартова система координат.
- 46. Логарифмические частотные характеристики В практических расчетах наряду с использованием АФЧХ широко используются так называемые логарифмические амплитудные
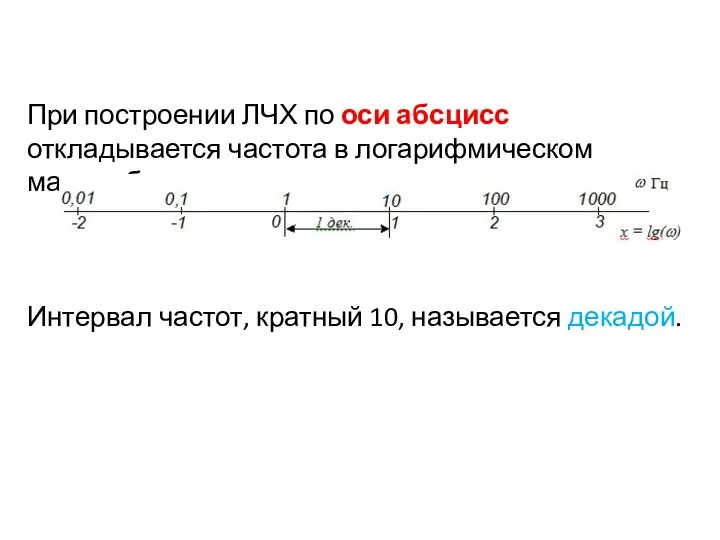
- 47. При построении ЛЧХ по оси абсцисс откладывается частота в логарифмическом масштабе Интервал частот, кратный 10, называется
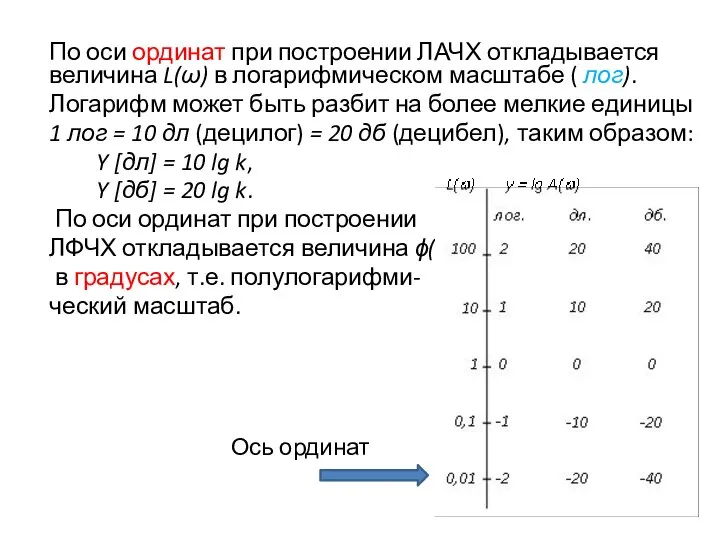
- 48. По оси ординат при построении ЛАЧХ откладывается величина L(ω) в логарифмическом масштабе ( лог). Логарифм может
- 50. Скачать презентацию
Слайд 3Лабораторные работы
Методичка.
Развёрнутый лист в клеточку.
Линейка или прямоугольный треугольник (равнобедренный с углами 45
Лабораторные работы
Методичка.
Развёрнутый лист в клеточку.
Линейка или прямоугольный треугольник (равнобедренный с углами 45
Слайд 4Автоматическим управлением называется процесс поддержания или изменения по заданному закону значений показателей
Автоматическим управлением называется процесс поддержания или изменения по заданному закону значений показателей
Слайд 5Типовая упрощенная
Типовая упрощенная
Слайд 6Отклонение регулируемой величины от заданного значения происходит под действием различных причин или,
Отклонение регулируемой величины от заданного значения происходит под действием различных причин или,
Слайд 7Воздействие
ЗЗадающее
ВВозмущающее
ООсновное
Второстепенное
Воздействие
ЗЗадающее
ВВозмущающее
ООсновное
Второстепенное
Слайд 8 Характер переходных процессов в результате приложенного к системе воздействия зависит главным
Характер переходных процессов в результате приложенного к системе воздействия зависит главным
Слайд 9 а) единичный скачок (единичное ступенчатое воздействие) - замыкание или размыкание цепи,
а) единичный скачок (единичное ступенчатое воздействие) - замыкание или размыкание цепи,
Слайд 10б) гармоническое воздействие – изменение по синусоидальному или косинусоидальному закону во времени,
б) гармоническое воздействие – изменение по синусоидальному или косинусоидальному закону во времени,
Слайд 112 Обратные связи
Задача САУ - обеспечить процесс поддержания или изменения по заданному
2 Обратные связи
Задача САУ - обеспечить процесс поддержания или изменения по заданному
Слайд 12Разомкнутая система
Замкнутая одноконтурная система
Разомкнутая система
Замкнутая одноконтурная система
Слайд 13Р – регулятор:
УУ – управляющее устройство;
У - усилитель; СП – силовой преобразователь;
ОУ
Р – регулятор:
УУ – управляющее устройство;
У - усилитель; СП – силовой преобразователь;
ОУ
Слайд 14 Системы, имеющие одну главную обратную связь, называются одноконтурными. Некоторые САУ, помимо
Системы, имеющие одну главную обратную связь, называются одноконтурными. Некоторые САУ, помимо
Слайд 15В зависимости от характера передаваемого воздействия О.С. подразделяются на жесткие и гибкие.
В зависимости от характера передаваемого воздействия О.С. подразделяются на жесткие и гибкие.
Слайд 16По оказываемому на систему действию ОС делятся на положительные и отрицательные. ОС
По оказываемому на систему действию ОС делятся на положительные и отрицательные. ОС





Слайд 25Операторный метод
Сущность операторного метода заключается в том, что расчет переходного процесса переносится
Операторный метод
Сущность операторного метода заключается в том, что расчет переходного процесса переносится
Слайд 26Прямое преобразование Лапласа определяется уравнением
, (1)
где f(t) – функция действительного переменного t,
Прямое преобразование Лапласа определяется уравнением
, (1)
где f(t) – функция действительного переменного t,
Слайд 27Для сокращения записи преобразований (1) используют следующую символику:
,
где L – оператор
Для сокращения записи преобразований (1) используют следующую символику:
,
где L – оператор
Слайд 29Рассмотрим некоторые свойства преобразования Лапласа, называемые также теоремами.
Теорема о сложении или линейность преобразования
.
Теорема
Рассмотрим некоторые свойства преобразования Лапласа, называемые также теоремами.
Теорема о сложении или линейность преобразования
.
Теорема
Слайд 30Пользуясь основными свойствами преобразования Лапласа, можно получить основные законы теории цепей в
Пользуясь основными свойствами преобразования Лапласа, можно получить основные законы теории цепей в
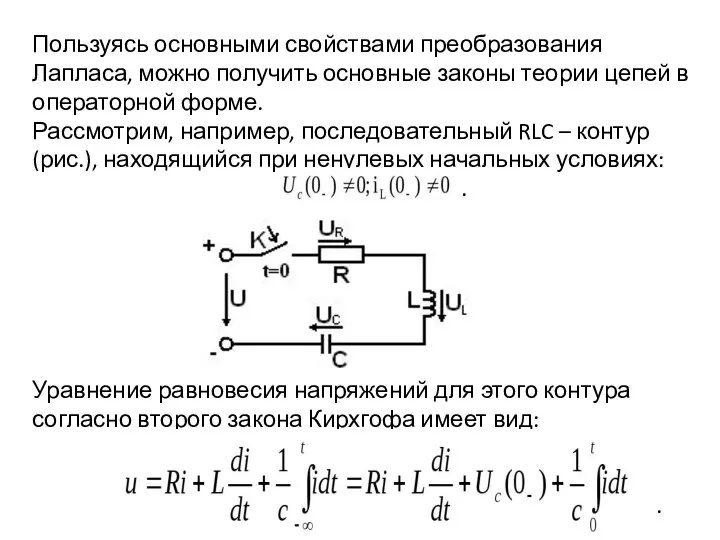
Слайд 31Применив к прямое преобразование Лапласа и учитывая свойства линейности дифференцирования и интегрирования
Применив к прямое преобразование Лапласа и учитывая свойства линейности дифференцирования и интегрирования
Слайд 32Алгоритм анализа переходных процессов операторным методом.
Расчет переходного процесса операторным методом предусматривает следующий
Алгоритм анализа переходных процессов операторным методом.
Расчет переходного процесса операторным методом предусматривает следующий
Слайд 33Уравнение в оригиналах (обычное уравнение – среди х(t)
УУУравнение в изображениях
( среди
Уравнение в оригиналах (обычное уравнение – среди х(t)
УУУравнение в изображениях
( среди
Слайд 341 Динамика объектов
Уравнение динамики объектов
Пусть дана система
Если получить систему дифференциальных уравнений, составленных
1 Динамика объектов
Уравнение динамики объектов
Пусть дана система
Если получить систему дифференциальных уравнений, составленных
Слайд 35где − постоянные коэффициенты.
Уравнение носит название общего дифференциального уравнения САУ или уравнения
где − постоянные коэффициенты.
Уравнение носит название общего дифференциального уравнения САУ или уравнения
Слайд 36Применяя к дифференциальному уравнению при нулевых начальных условиях преобразование Лапласа, запишем это
Применяя к дифференциальному уравнению при нулевых начальных условиях преобразование Лапласа, запишем это
Слайд 371.1 Понятие о передаточной функции
Передаточной функцией САУ по задающему воздействию называется отношение
1.1 Понятие о передаточной функции
Передаточной функцией САУ по задающему воздействию называется отношение
Слайд 38передаточной функцией САУ по возмущающему воздействию называют отношение операторного изображения выходной величины
передаточной функцией САУ по возмущающему воздействию называют отношение операторного изображения выходной величины
Слайд 39Т.к. при записи уравнений линейной САУ в операторной форме дифференциальные уравнения становятся
Т.к. при записи уравнений линейной САУ в операторной форме дифференциальные уравнения становятся
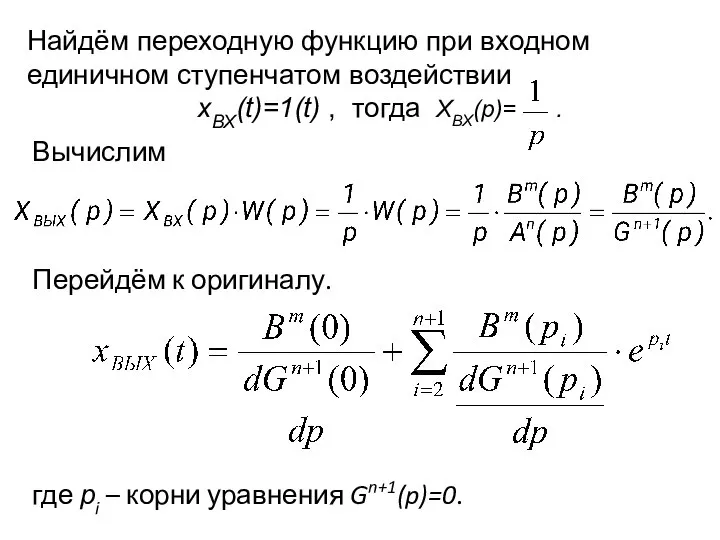
Слайд 40Найдём переходную функцию при входном единичном ступенчатом воздействии
хВХ(t)=1(t) , тогда ХВХ(р)=
Найдём переходную функцию при входном единичном ступенчатом воздействии
хВХ(t)=1(t) , тогда ХВХ(р)=
Слайд 411.2 Частотные характеристики
1.2 Частотные характеристики
Слайд 42Совместное изменение амплитуды и фазы выходной величины от частоты можно получить, если
Совместное изменение амплитуды и фазы выходной величины от частоты можно получить, если
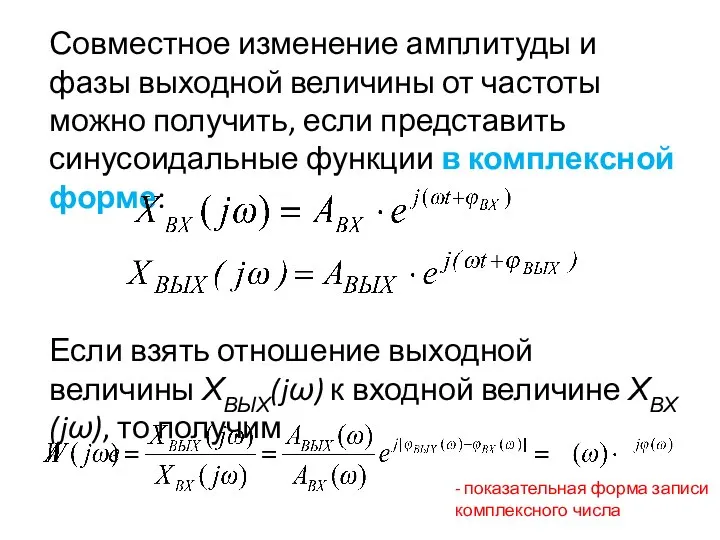
Слайд 43Комплексная функция W(jω) называется комплексным коэффициентом передачи САУ или амплитудно-фазовой частотной характеристикой
Комплексная функция W(jω) называется комплексным коэффициентом передачи САУ или амплитудно-фазовой частотной характеристикой
Слайд 44Между собой ВЧХ, МЧХ и АЧХ, ФЧХ связаны
Между собой ВЧХ, МЧХ и АЧХ, ФЧХ связаны
Слайд 45График называется годографом –
АЧХ, ФЧХ – полярная система координат и ВЧХ,МЧХ –
График называется годографом –
АЧХ, ФЧХ – полярная система координат и ВЧХ,МЧХ –
Слайд 46Логарифмические частотные характеристики
В практических расчетах наряду с использованием АФЧХ широко используются так
Логарифмические частотные характеристики
В практических расчетах наряду с использованием АФЧХ широко используются так
Слайд 47При построении ЛЧХ по оси абсцисс откладывается частота в логарифмическом масштабе
Интервал частот,
При построении ЛЧХ по оси абсцисс откладывается частота в логарифмическом масштабе
Интервал частот,
Слайд 48По оси ординат при построении ЛАЧХ откладывается величина L(ω) в логарифмическом масштабе
По оси ординат при построении ЛАЧХ откладывается величина L(ω) в логарифмическом масштабе
 рух по колу
рух по колу Место доказательств в научном познании
Место доказательств в научном познании Полупроводники
Полупроводники Устранение несоответствия по контакту жгута проводов двигателя о кромку площадки АКБ на а/м LADA XRAY с двигателями ВАЗ
Устранение несоответствия по контакту жгута проводов двигателя о кромку площадки АКБ на а/м LADA XRAY с двигателями ВАЗ Путешествие по океану Знаний
Путешествие по океану Знаний Электричество и магнетизм. Курс лекций
Электричество и магнетизм. Курс лекций Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7)
Методы, основанные на индуцированном переходе из одной фазы в другую через разделяющую их третью фазу. (Лекция 7) ИГЭС2 семестр Колебания лекция 1
ИГЭС2 семестр Колебания лекция 1 Механические колебания и волны. Решение задач. 11 класс
Механические колебания и волны. Решение задач. 11 класс Измерение физических величин
Измерение физических величин Реактивное движение. Ракеты
Реактивное движение. Ракеты Решение задач по теме Закон всемирного тяготения
Решение задач по теме Закон всемирного тяготения Невидимая сила
Невидимая сила Резисторы и Реостаты. Занятие 7
Резисторы и Реостаты. Занятие 7 Обработка деталей на оборудовании с ЧПУ
Обработка деталей на оборудовании с ЧПУ Открытия Ломоносова в области физики
Открытия Ломоносова в области физики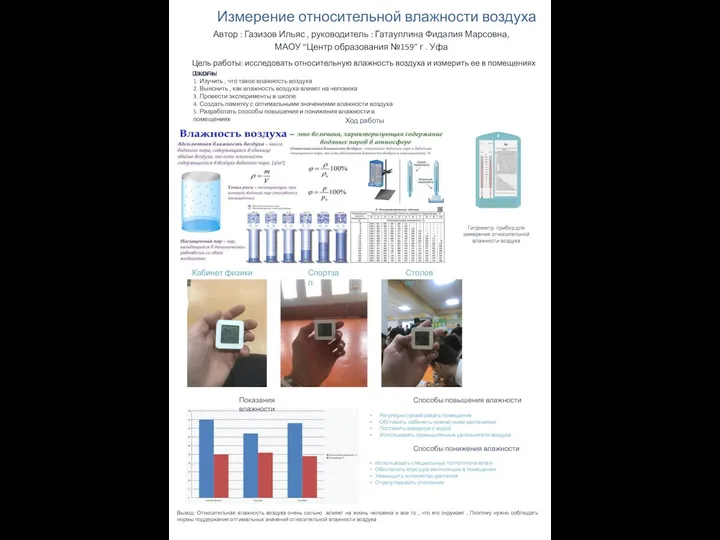 Измерение относительной влажности воздуха
Измерение относительной влажности воздуха Волновая теория Эллиотта
Волновая теория Эллиотта Строение атомов химических элементов
Строение атомов химических элементов Ультрофеолетовые волны
Ультрофеолетовые волны Основные характеристики гребных винтов
Основные характеристики гребных винтов Судың физикалық қасиеттері
Судың физикалық қасиеттері Источники света. Прямолинейное распространение света,
Источники света. Прямолинейное распространение света, Вещества в электрическом поле
Вещества в электрическом поле Урок 21+ Розв'язування задач
Урок 21+ Розв'язування задач Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов
Разработка системы управления узлом подготовки реакционной смеси с применением САР соотношения расходов Вольфрам
Вольфрам Презентация на тему Сила упругости
Презентация на тему Сила упругости