- Биомеханика. Кинематика. Относительность движения

Содержание
- 2. Метод биомеханики ‒ системный анализ и системный синтез движений на основе количественных характеристик, в частности кибернетическое
- 3. Система движений как целое ‒ не просто сумма её составляющих частей. Части системы объединены многочисленными взаимосвязями,
- 4. При изучении движений в процессе развития системного анализа и синтеза в последние годы все шире применяется
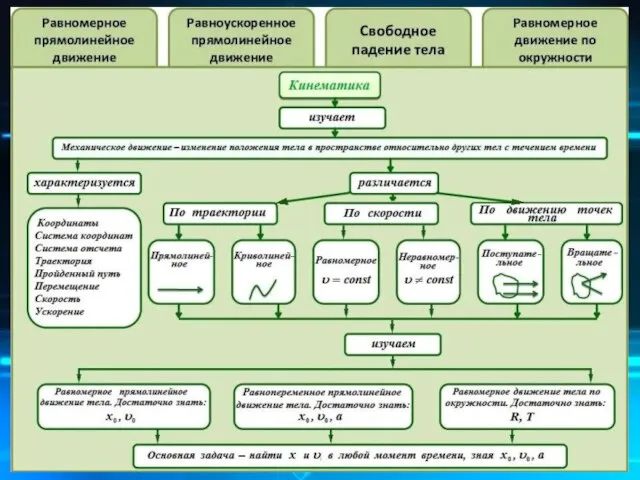
- 5. КИНЕМАТИКА
- 6. Относительность движения
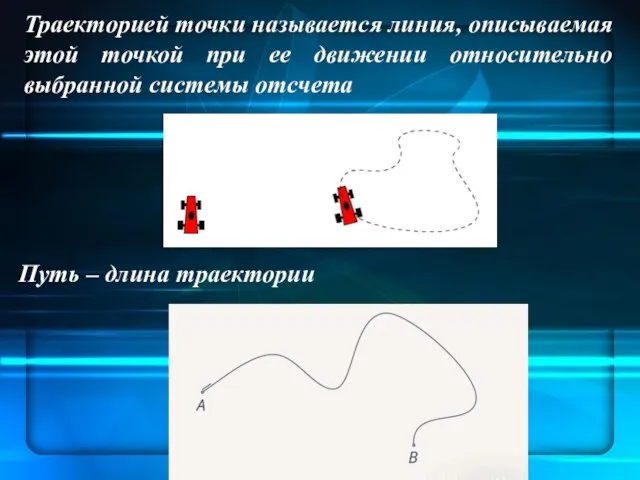
- 7. Путь ‒ длина траектории Траекторией точки называется линия, описываемая этой точкой при ее движении относительно выбранной
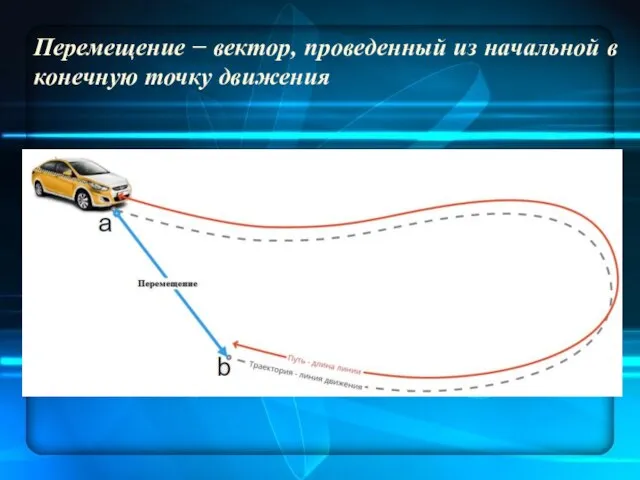
- 8. Перемещение − вектор, проведенный из начальной в конечную точку движения
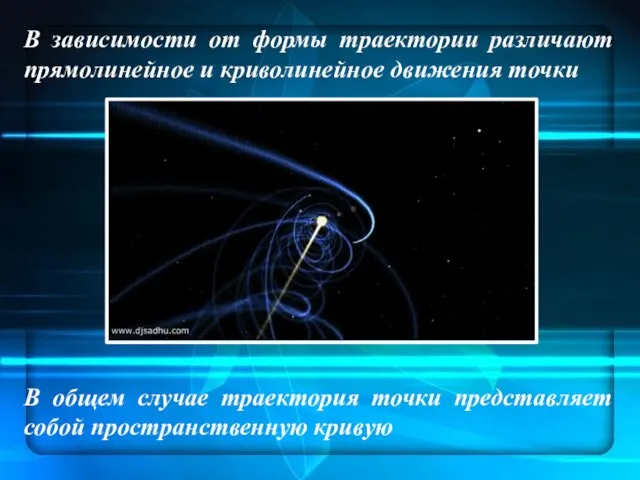
- 9. В зависимости от формы траектории различают прямолинейное и криволинейное движения точки В общем случае траектория точки
- 10. Скорость Для характеристики направления и быстроты движения в механике вводится векторная физическая величина, называемая скоростью Средней
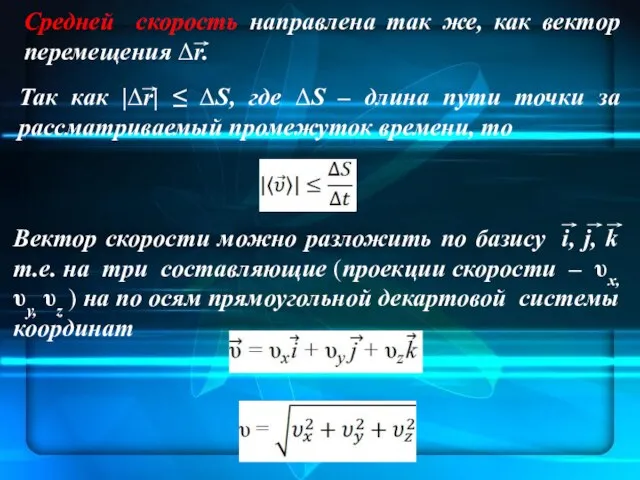
- 11. Средней скорость направлена так же, как вектор перемещения Δr. Так как |Δr| ≤ ΔS, где ΔS
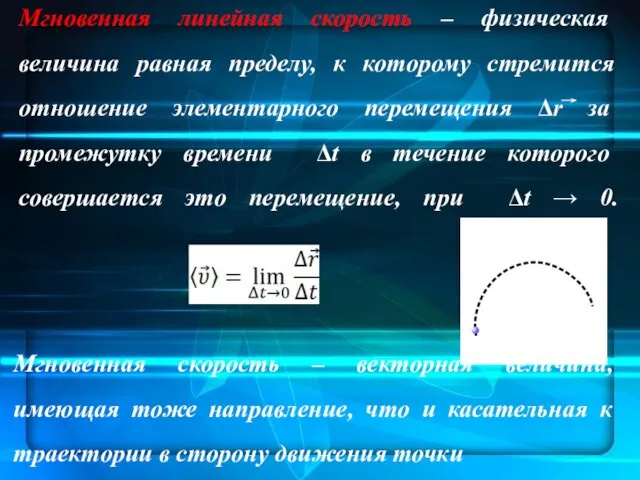
- 12. Мгновенная линейная скорость – физическая величина равная пределу, к которому стремится отношение элементарного перемещения Δr за
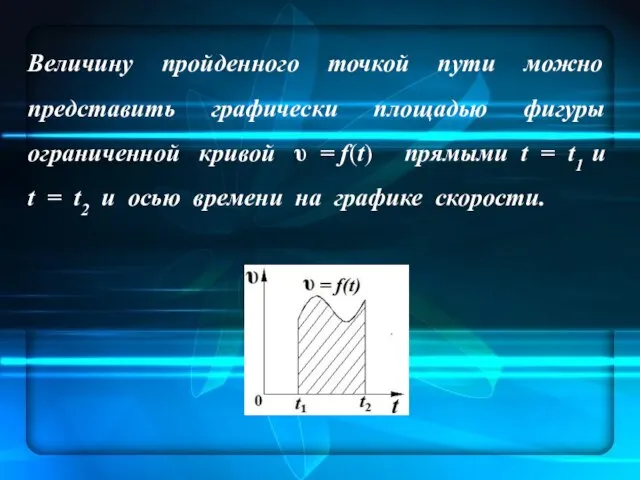
- 13. Величину пройденного точкой пути можно представить графически площадью фигуры ограниченной кривой υ = f(t) прямыми t
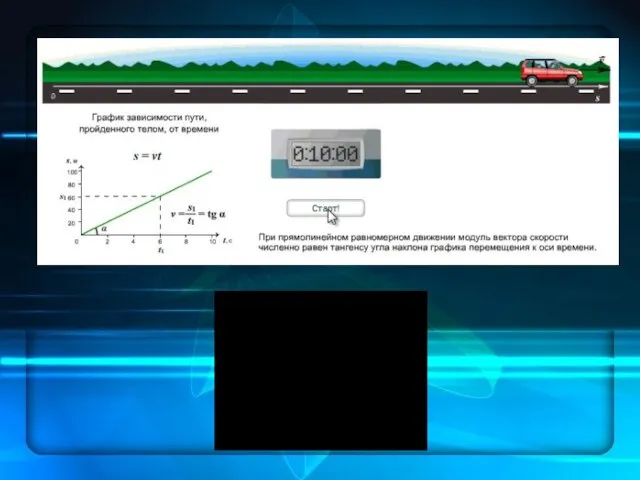
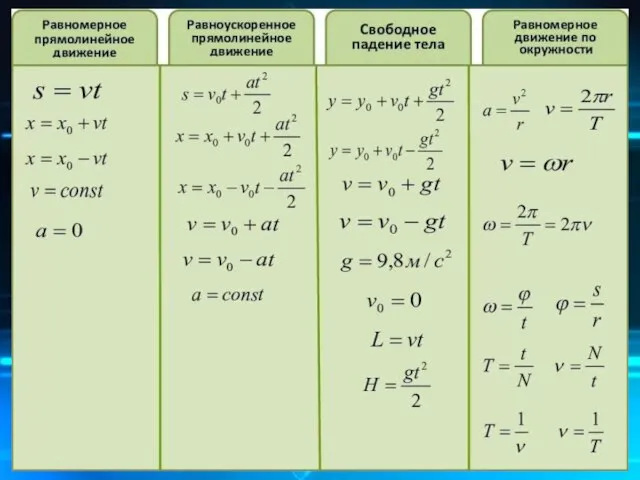
- 14. Прямолинейное равномерное движение Прямолинейным равномерным движением называется движение при котором материальная точка, двигаясь по прямой, за
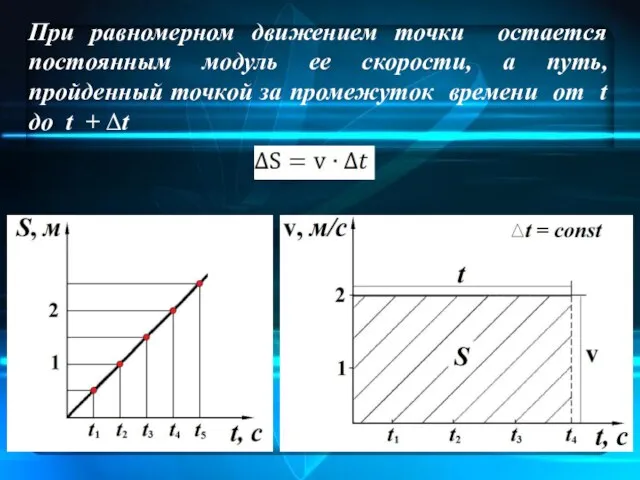
- 16. При равномерном движением точки остается постоянным модуль ее скорости, а путь, пройденный точкой за промежуток времени
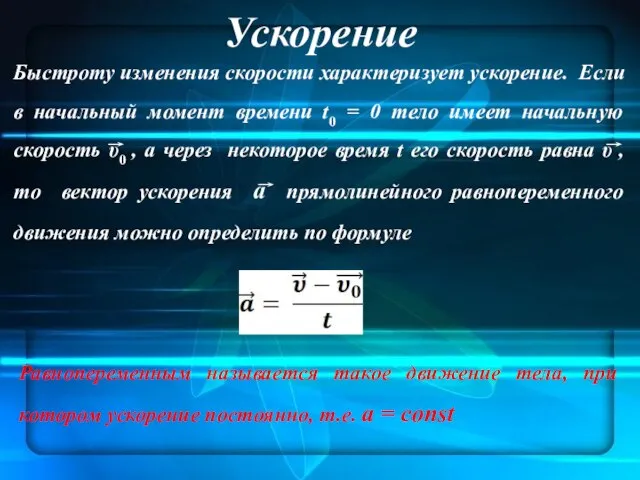
- 17. Ускорение Быстроту изменения скорости характеризует ускорение. Если в начальный момент времени t0 = 0 тело имеет
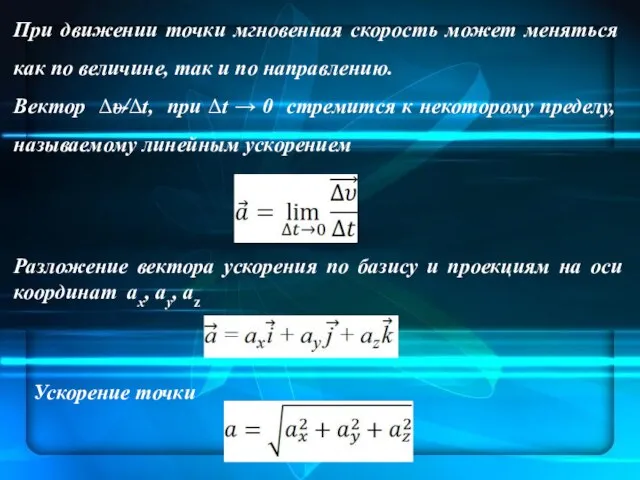
- 18. При движении точки мгновенная скорость может меняться как по величине, так и по направлению. Вектор Δυ/Δt,
- 20. Прямолинейное равнопеременное движение Движение материальной точки, при котором ее скорость за любые промежутки времени увеличивается или
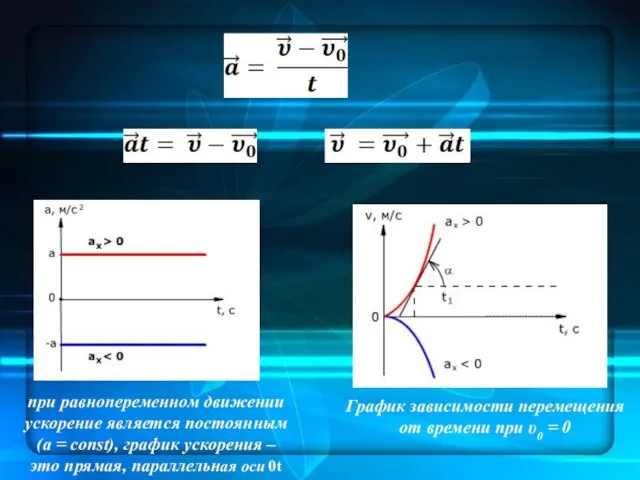
- 21. График зависимости перемещения от времени при υ0 = 0 при равнопеременном движении ускорение является постоянным (a
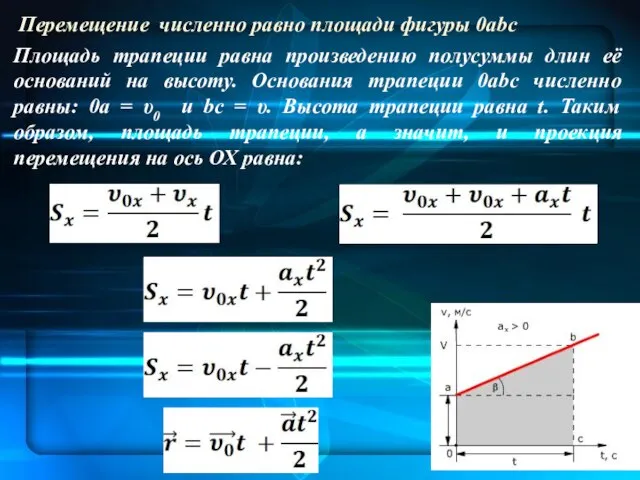
- 22. Площадь трапеции равна произведению полусуммы длин её оснований на высоту. Основания трапеции 0abc численно равны: 0a
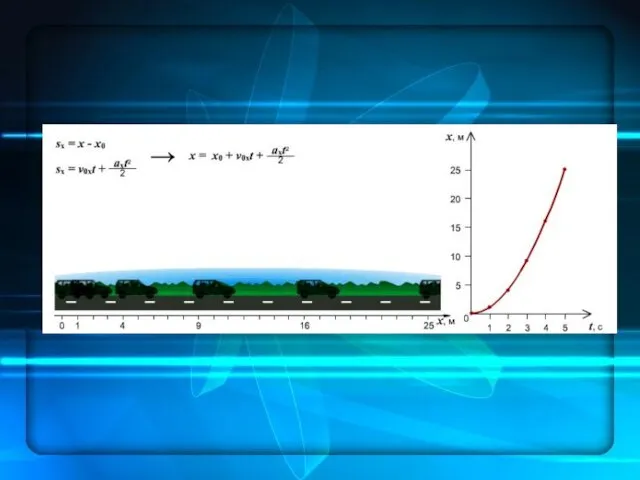
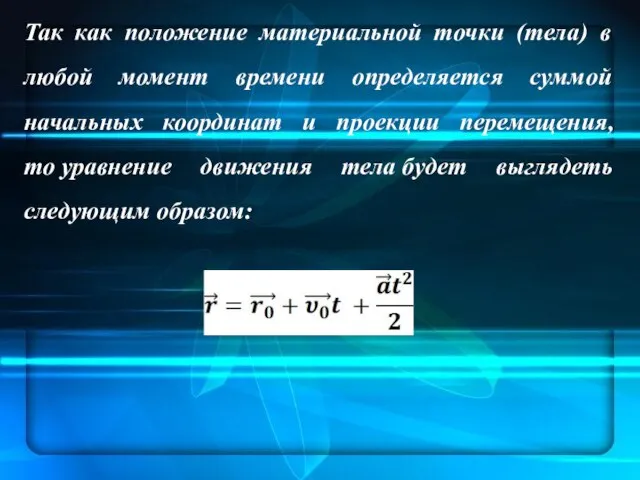
- 23. Так как положение материальной точки (тела) в любой момент времени определяется суммой начальных координат и проекции
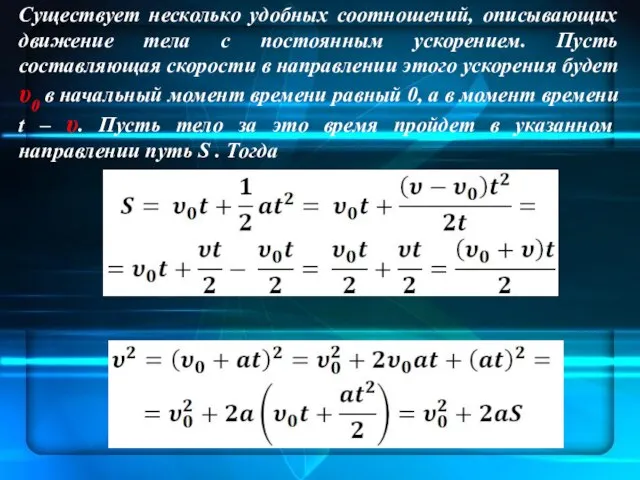
- 24. Существует несколько удобных соотношений, описывающих движение тела с постоянным ускорением. Пусть составляющая скорости в направлении этого
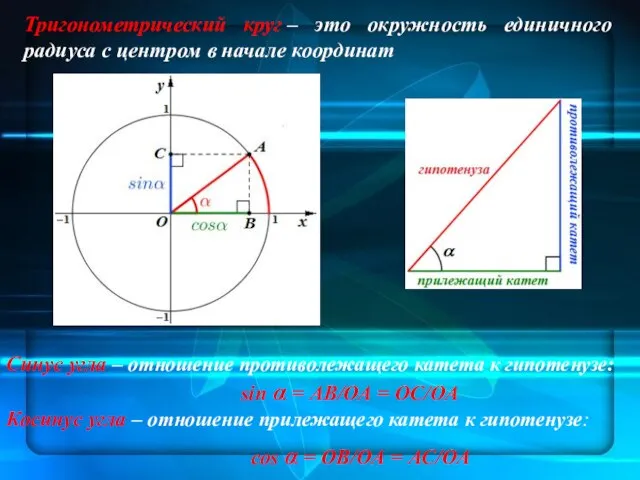
- 25. Тригонометрический круг – это окружность единичного радиуса с центром в начале координат Синус угла – отношение
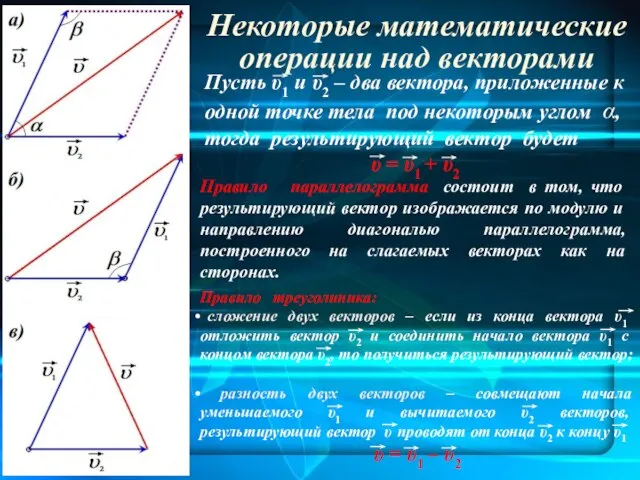
- 26. Некоторые математические операции над векторами Пусть υ1 и υ2 ‒ два вектора, приложенные к одной точке
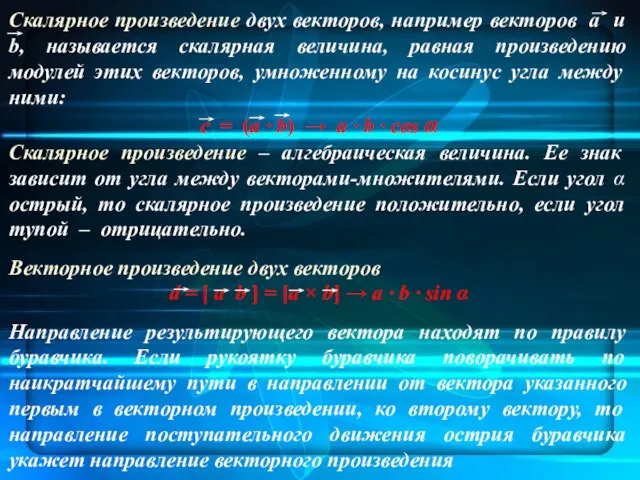
- 27. Скалярное произведение двух векторов, например векторов a и b, называется скалярная величина, равная произведению модулей этих
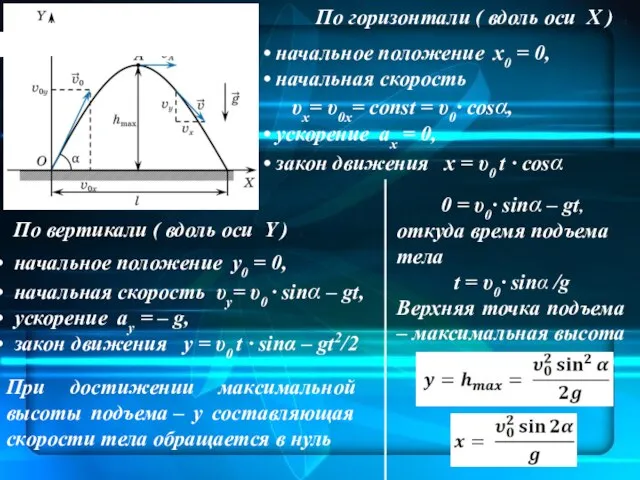
- 28. По горизонтали ( вдоль оси X ) ): начальное положение x0 = 0, начальная скорость υx=
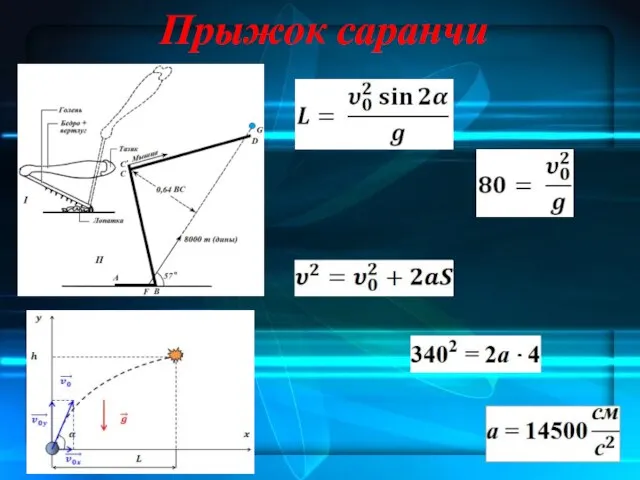
- 29. Прыжок саранчи
- 30. А В
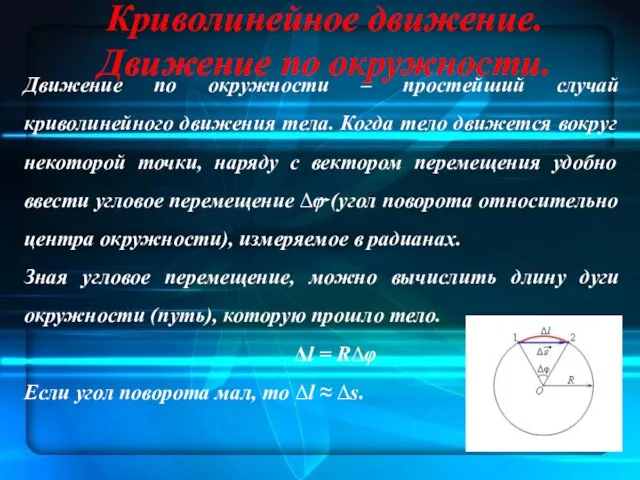
- 31. Криволинейное движение. Движение по окружности. Движение по окружности ‒ простейший случай криволинейного движения тела. Когда тело
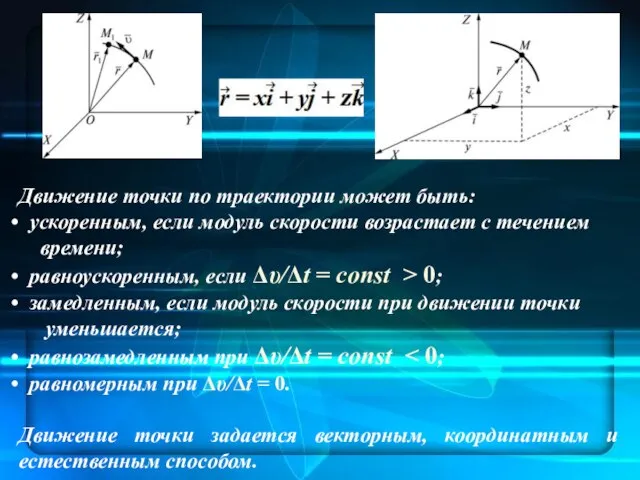
- 32. Движение точки по траектории может быть: ускоренным, если модуль скорости возрастает с течением времени; равноускоренным, если
- 33. При векторном способе движение точки задается законом изменения радиуса-вектора во времени При координатном способе движение точки
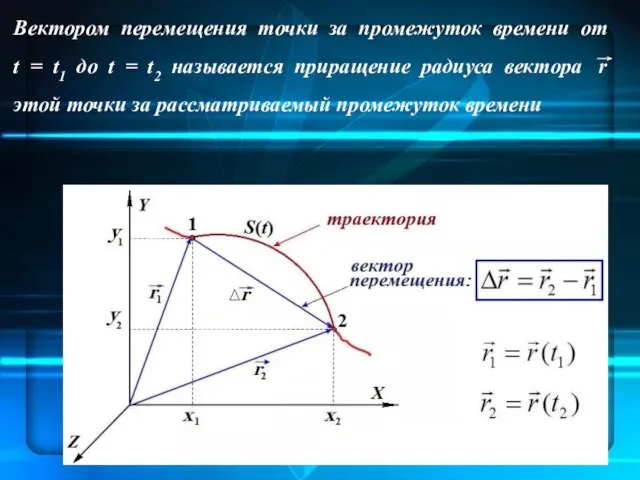
- 34. Вектором перемещения точки за промежуток времени от t = t1 до t = t2 называется приращение
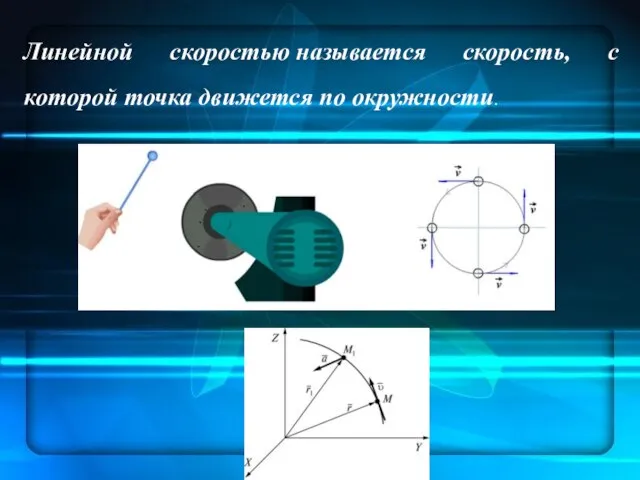
- 35. Линейной скоростью называется скорость, с которой точка движется по окружности.
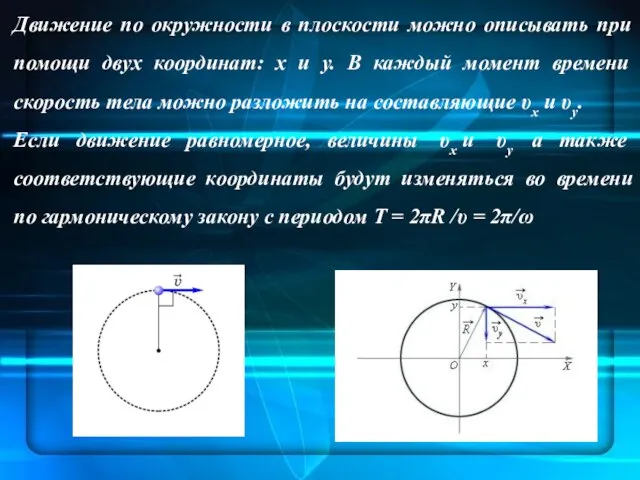
- 36. Движение по окружности в плоскости можно описывать при помощи двух координат: x и y. В каждый
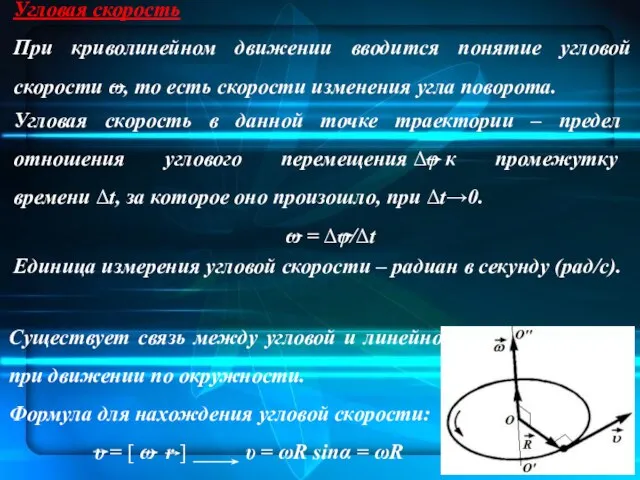
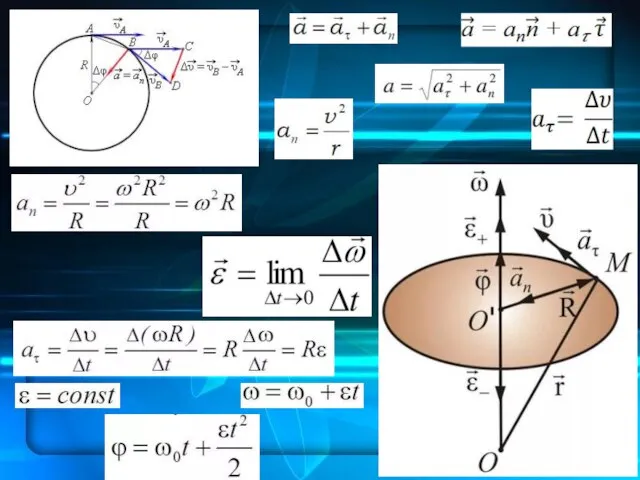
- 38. Существует связь между угловой и линейной скоростями тела при движении по окружности. Формула для нахождения угловой
- 40. Частота вращения показывает, сколько оборотов совершает за единицу времени материальная точка (тело), равномерно вращающееся с угловой
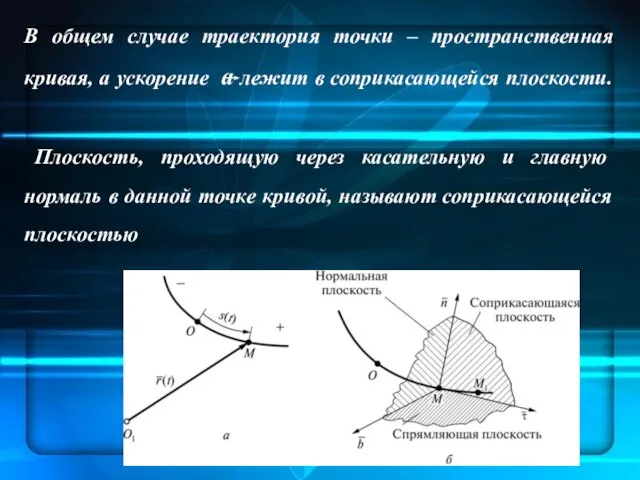
- 41. В общем случае траектория точки ‒ пространственная кривая, а ускорение а лежит в соприкасающейся плоскости. Плоскость,
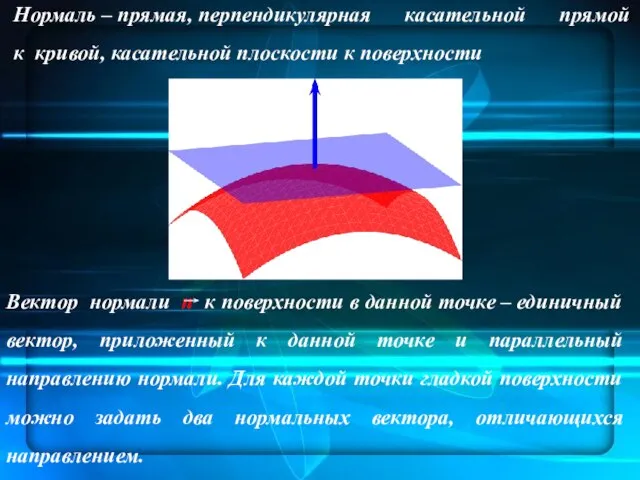
- 42. Нормаль ‒ прямая, перпендикулярная касательной прямой к кривой, касательной плоскости к поверхности Вектор нормали n к
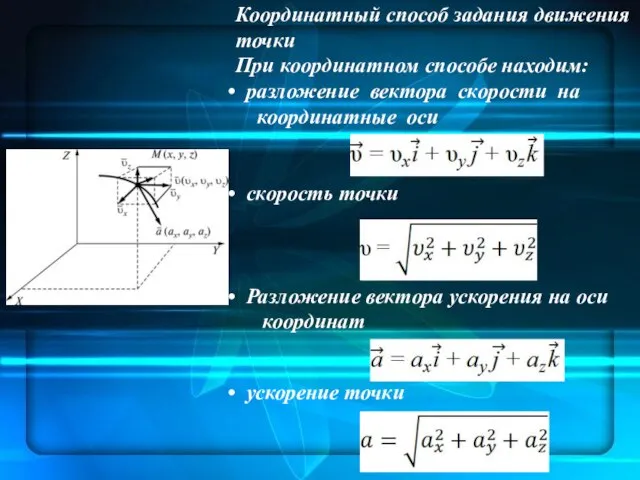
- 43. Координатный способ задания движения точки При координатном способе находим: разложение вектора скорости на координатные оси скорость
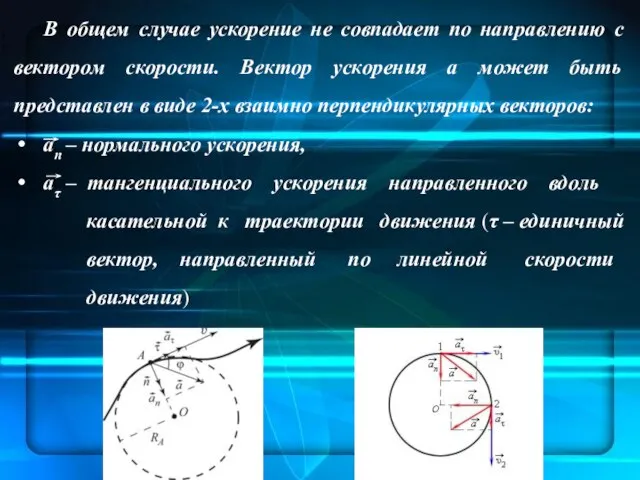
- 44. В общем случае ускорение не совпадает по направлению с вектором скорости. Вектор ускорения а может быть
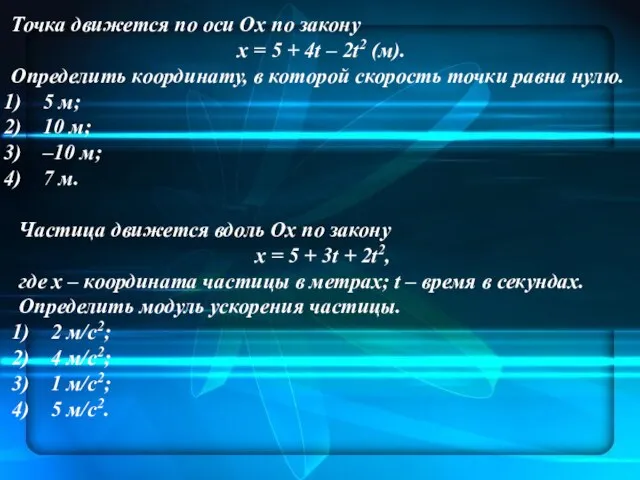
- 49. Точка движется по оси Ох по закону x = 5 + 4t – 2t2 (м). Определить
- 51. Скачать презентацию
Слайд 2Метод биомеханики ‒ системный анализ и системный синтез движений на основе количественных характеристик,
Метод биомеханики ‒ системный анализ и системный синтез движений на основе количественных характеристик,
Слайд 3Система движений как целое ‒ не просто сумма её составляющих частей. Части системы объединены
Система движений как целое ‒ не просто сумма её составляющих частей. Части системы объединены
Слайд 4При изучении движений в процессе развития системного анализа и синтеза в последние
При изучении движений в процессе развития системного анализа и синтеза в последние
Слайд 5КИНЕМАТИКА
КИНЕМАТИКА

Слайд 6Относительность движения
Относительность движения
Слайд 7Путь ‒ длина траектории
Траекторией точки называется линия, описываемая этой точкой при
Путь ‒ длина траектории
Траекторией точки называется линия, описываемая этой точкой при
Слайд 8Перемещение − вектор, проведенный из начальной в конечную точку движения
Перемещение − вектор, проведенный из начальной в конечную точку движения
Слайд 9В зависимости от формы траектории различают прямолинейное и криволинейное движения точки
В общем
В зависимости от формы траектории различают прямолинейное и криволинейное движения точки
В общем
Слайд 10Скорость
Для характеристики направления и быстроты движения в механике вводится векторная физическая величина,
Скорость
Для характеристики направления и быстроты движения в механике вводится векторная физическая величина,
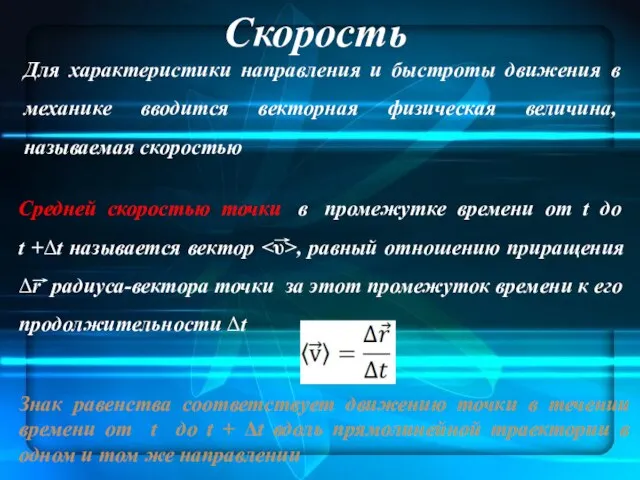
Слайд 11Средней скорость направлена так же, как вектор перемещения Δr.
Так как |Δr| ≤
Средней скорость направлена так же, как вектор перемещения Δr.
Так как |Δr| ≤
Слайд 12Мгновенная линейная скорость – физическая величина равная пределу, к которому стремится отношение
Мгновенная линейная скорость – физическая величина равная пределу, к которому стремится отношение
Слайд 13Величину пройденного точкой пути можно представить графически площадью фигуры ограниченной кривой υ
Величину пройденного точкой пути можно представить графически площадью фигуры ограниченной кривой υ
Слайд 14Прямолинейное равномерное движение
Прямолинейным равномерным движением называется движение при котором материальная точка, двигаясь
Прямолинейное равномерное движение
Прямолинейным равномерным движением называется движение при котором материальная точка, двигаясь
Слайд 16При равномерном движением точки остается постоянным модуль ее скорости, а путь, пройденный
При равномерном движением точки остается постоянным модуль ее скорости, а путь, пройденный
Слайд 17Ускорение
Быстроту изменения скорости характеризует ускорение. Если в начальный момент времени t0 =
Ускорение
Быстроту изменения скорости характеризует ускорение. Если в начальный момент времени t0 =
Слайд 18При движении точки мгновенная скорость может меняться как по величине, так и
При движении точки мгновенная скорость может меняться как по величине, так и
Слайд 20Прямолинейное равнопеременное движение
Движение материальной точки, при котором ее скорость за любые промежутки
Прямолинейное равнопеременное движение
Движение материальной точки, при котором ее скорость за любые промежутки
Слайд 21График зависимости перемещения от времени при υ0 = 0
при равнопеременном движении ускорение
График зависимости перемещения от времени при υ0 = 0
при равнопеременном движении ускорение
Слайд 22Площадь трапеции равна произведению полусуммы длин её оснований на высоту. Основания трапеции
Площадь трапеции равна произведению полусуммы длин её оснований на высоту. Основания трапеции
Слайд 23Так как положение материальной точки (тела) в любой момент времени определяется суммой
Так как положение материальной точки (тела) в любой момент времени определяется суммой
Слайд 24Существует несколько удобных соотношений, описывающих движение тела с постоянным ускорением. Пусть составляющая
Существует несколько удобных соотношений, описывающих движение тела с постоянным ускорением. Пусть составляющая
Слайд 25Тригонометрический круг – это окружность единичного радиуса с центром в начале координат
Синус угла –
Тригонометрический круг – это окружность единичного радиуса с центром в начале координат
Синус угла –
Слайд 26Некоторые математические операции над векторами
Пусть υ1 и υ2 ‒ два вектора, приложенные
Некоторые математические операции над векторами
Пусть υ1 и υ2 ‒ два вектора, приложенные
Слайд 27Скалярное произведение двух векторов, например векторов a и b, называется скалярная величина,
Скалярное произведение двух векторов, например векторов a и b, называется скалярная величина,
Слайд 28По горизонтали ( вдоль оси X ) ):
начальное положение x0
По горизонтали ( вдоль оси X ) ):
начальное положение x0
Слайд 29Прыжок саранчи
Прыжок саранчи
Слайд 30 А
В
А
В
Слайд 31Криволинейное движение. Движение по окружности.
Движение по окружности ‒ простейший случай криволинейного движения
Криволинейное движение. Движение по окружности.
Движение по окружности ‒ простейший случай криволинейного движения
Слайд 32Движение точки по траектории может быть:
ускоренным, если модуль скорости возрастает с течением
Движение точки по траектории может быть:
ускоренным, если модуль скорости возрастает с течением
Слайд 33При векторном способе движение точки задается законом изменения радиуса-вектора во времени
При координатном способе движение точки задается
При векторном способе движение точки задается законом изменения радиуса-вектора во времени
При координатном способе движение точки задается
Слайд 34Вектором перемещения точки за промежуток времени от t = t1 до t
Вектором перемещения точки за промежуток времени от t = t1 до t
Слайд 35Линейной скоростью называется скорость, с которой точка движется по окружности.
Линейной скоростью называется скорость, с которой точка движется по окружности.
Слайд 36Движение по окружности в плоскости можно описывать при помощи двух координат: x
Движение по окружности в плоскости можно описывать при помощи двух координат: x
Слайд 38Существует связь между угловой и линейной скоростями тела при движении по окружности.
Существует связь между угловой и линейной скоростями тела при движении по окружности.

Слайд 40Частота вращения показывает, сколько оборотов совершает за единицу времени материальная точка (тело),
Частота вращения показывает, сколько оборотов совершает за единицу времени материальная точка (тело),
Слайд 41В общем случае траектория точки ‒ пространственная кривая, а ускорение а лежит
В общем случае траектория точки ‒ пространственная кривая, а ускорение а лежит
Слайд 42Нормаль ‒ прямая, перпендикулярная касательной прямой к кривой, касательной плоскости к поверхности
Вектор нормали n к поверхности в
Нормаль ‒ прямая, перпендикулярная касательной прямой к кривой, касательной плоскости к поверхности
Вектор нормали n к поверхности в
Слайд 43Координатный способ задания движения точки
При координатном способе находим:
разложение вектора скорости на
Координатный способ задания движения точки
При координатном способе находим:
разложение вектора скорости на
Слайд 44В общем случае ускорение не совпадает по направлению с вектором скорости. Вектор
В общем случае ускорение не совпадает по направлению с вектором скорости. Вектор

Слайд 49Точка движется по оси Ох по закону
x = 5 + 4t –
Точка движется по оси Ох по закону
x = 5 + 4t –
 Задачи на массовую долю элемента
Задачи на массовую долю элемента Технологии обработки материалов. Лекция 13
Технологии обработки материалов. Лекция 13 Отражение света. 8 класс
Отражение света. 8 класс Импульс тела. Закон сохранения импульса
Импульс тела. Закон сохранения импульса Построение изображений в линзах
Построение изображений в линзах Основы термодинамики
Основы термодинамики Изделие и техническая информация о нем
Изделие и техническая информация о нем Закон сохранения механической энергии
Закон сохранения механической энергии Физика в белом халате
Физика в белом халате Презентация на тему Механические колебания (11 класс)
Презентация на тему Механические колебания (11 класс)  Складирование деталей и конструкций краном КС-35714К310; техническое обслуживание и ремонт карданной и главной передачи ЗИЛ
Складирование деталей и конструкций краном КС-35714К310; техническое обслуживание и ремонт карданной и главной передачи ЗИЛ Сила Ампера
Сила Ампера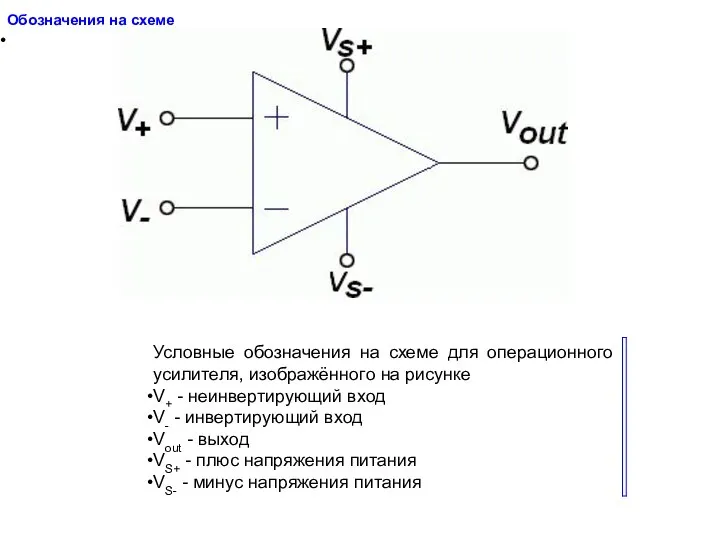 Обозначения на схеме
Обозначения на схеме Презентация на тему Строение вещества
Презентация на тему Строение вещества  Презентация на тему Виды излучений (11 класс)
Презентация на тему Виды излучений (11 класс)  Обобщающий урок по теме Механика. 10 класс
Обобщающий урок по теме Механика. 10 класс Вентиляция в школе
Вентиляция в школе Квантовая механика
Квантовая механика Влияние нагрева на структуру и фазовый состав композитов системы Al-Ti
Влияние нагрева на структуру и фазовый состав композитов системы Al-Ti Электрический ток в жидкостях
Электрический ток в жидкостях Анализ работы оборудования МХМ и Арнег
Анализ работы оборудования МХМ и Арнег Весы циферблатные
Весы циферблатные Трехфазный переменный ток. Мощность трехфазной цепи
Трехфазный переменный ток. Мощность трехфазной цепи Песочные часы. Изменение массы песочных часов
Песочные часы. Изменение массы песочных часов Молекулярно-кинетическая теория
Молекулярно-кинетическая теория Биология. Физика. Химия. Радиация. Естествознание, 10 класс
Биология. Физика. Химия. Радиация. Естествознание, 10 класс Плавление и кристаллизация вещества
Плавление и кристаллизация вещества Векторные диаграммы для описания переменных токов и напряжений
Векторные диаграммы для описания переменных токов и напряжений