- Osnovy_AU

Содержание
- 2. Основы теории автоматического управления Теория автоматического управления - наука, которая изучает процессы управления, методы их исследования
- 3. Классификация САУ (САР) Все системы автоматического управления и регулирования делятся на следующие основные классы: 1 .По
- 4. Основные понятия ТАУ Параметры технологического процесса - это физические величины, определяющие ход технологического процесса (напряжение, сила
- 5. Основные понятия ТАУ Мгновенное значение – это значение регулируемой величины в рассматриваемый момент времени. Измеренное значение
- 6. Основные понятия ТАУ Регулирование – это частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной
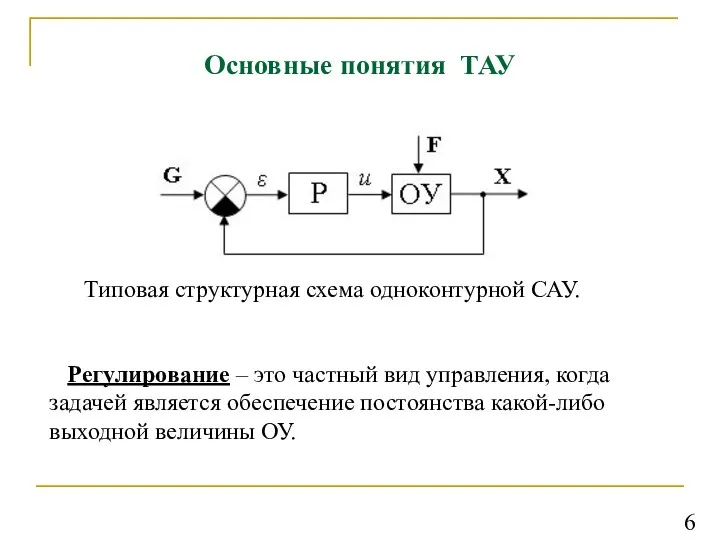
- 7. Основные понятия ТАУ Регулирование – это частный вид управления, когда задачей является обеспечение постоянства какой-либо выходной
- 8. Основные понятия ТАУ G – задающее воздействие (входное воздействие Х) – воздействие на систему, определяющее заданный
- 9. Основные понятия ТАУ Р – регулятор, это комплекс устройств, присоединяемых к регулируемому объекту и обеспечивающих автоматическое
- 10. Классификация САР 1. По назначению (по характеру изменения задания): - стабилизирующая САР, это система, алгоритм функционирования
- 11. Классификация САР 2. По количеству контуров: - одноконтурные - содержащие один контур, - многоконтурные - содержащие
- 12. Классификация САР 4. По функциональному назначению: - температуры; - давления; - расхода; - уровня; - напряжения
- 13. Классификация САР Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий, то реакция объекта
- 14. Классификация элементов САР 1. По функциональному назначению: - измерительные, - усилительно-преобразовательные, - исполнительные, - корректирующие. 2.
- 15. Классификация элементов САР 3. По наличию или отсутствию вспомогательного источника энергии: - активные (с источником энергии),
- 16. Классификация элементов САР 5. По поведению в статическом режиме: - статические, это системы в которых имеется
- 17. Характеристики и модели элементов и систем Статической характеристикой элемента называется зависимость установившихся значений выходной величины от
- 18. Характеристики и модели элементов и систем Астатическим называется элемент, у которого при постоянном входном воздействии сигнал
- 19. Характеристики и модели элементов и систем САР называется статической, если при постоянном входном воздействии ошибка управления
- 20. Динамические характеристики Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие при нулевых начальных условиях,
- 21. Дифференциальные уравнения Любые процессы передачи, обмена, преобразования энергии и вещества математически можно описать в виде дифференциальных
- 22. Дифференциальные уравнения Δх = х - х0 Δу = у - у0 F(х,у) = 0 21
- 23. Преобразования Лапласа Прямое преобразование Лапласа Обратное преобразование Лапласа 22
- 24. Передаточные функции Передаточной функцией называется отношение изображения выходного воздействия Y(s) к изображению входного X(s) при нулевых
- 25. Типовые звенья САР - усилительное Передаточная функция - идеально интегрирующее Передаточная функция Выходная величина Выходная величина
- 26. Типовые звенья САР - реальное интегрирующее Передаточная функция - идеально дифференцирующее Передаточная функция Выходная величина 25
- 27. Типовые звенья САР - реальное дифференцирующее Передаточная функция - апериодическое Передаточная функция Дифференциальное уравнение 26
- 28. Типовые звенья САР - колебательное Передаточная функция - запаздывающее Передаточная функция Дифференциальное уравнение Выходная величина 27
- 29. Соединения звеньев Последовательное соединение 28
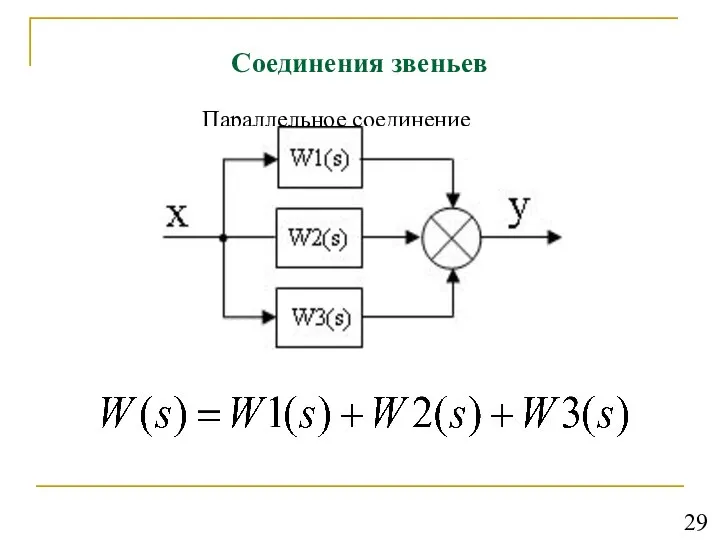
- 30. Соединения звеньев Параллельное соединение 29
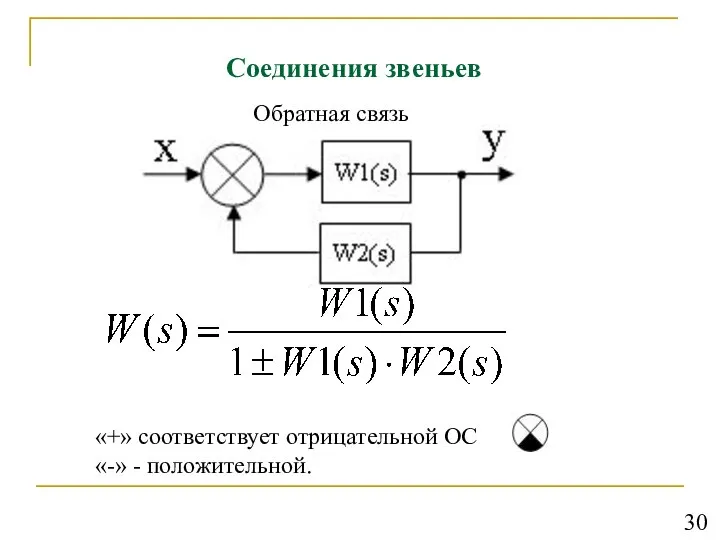
- 31. Соединения звеньев Обратная связь «+» соответствует отрицательной ОС «-» - положительной. 30
- 32. Передаточные функции САР 1) Для нахождения передаточной функции CAP в разомкнутом состоянии необходимо разомкнуть систему путем
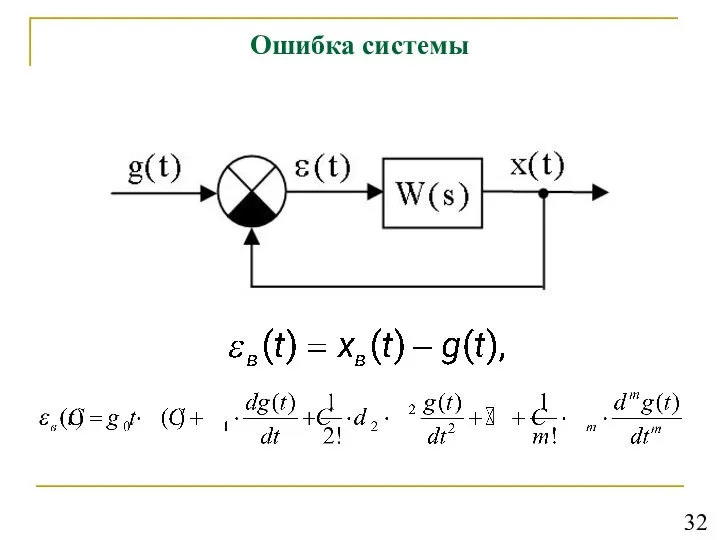
- 33. Ошибка системы 32
- 34. Коэффициенты ошибок 33
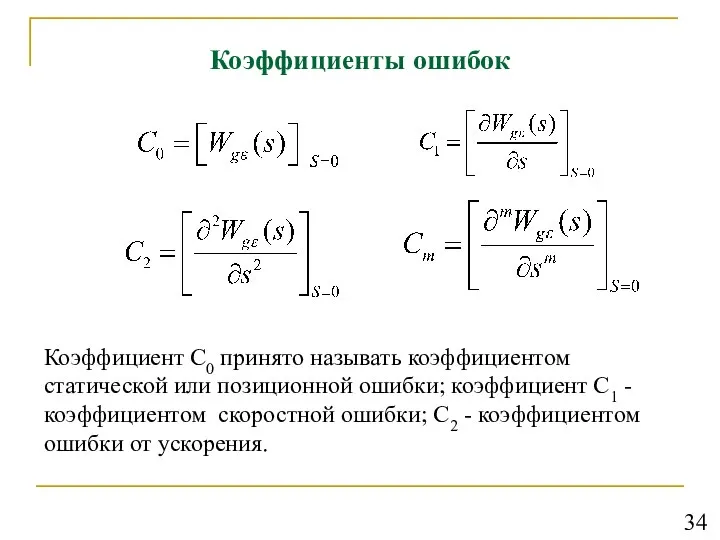
- 35. Коэффициенты ошибок Коэффициент С0 принято называть коэффициентом статической или позиционной ошибки; коэффициент С1 - коэффициентом скоростной
- 36. Коэффициенты ошибок 35
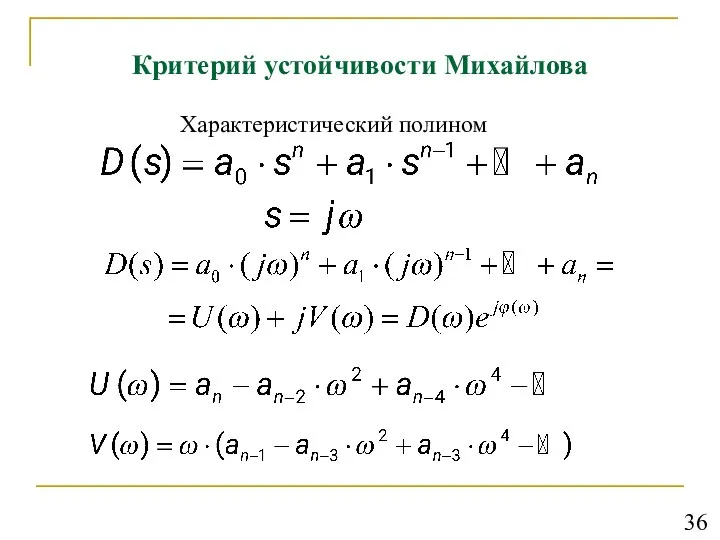
- 37. Критерий устойчивости Михайлова Характеристический полином 36
- 38. Критерий устойчивости Михайлова При изменении частоты ω вектор D(jω), изменяясь по величине и направлению, будет описывать
- 39. Критерий устойчивости Михайлова 38
- 40. Критерий устойчивости Михайлова Для того чтобы система автоматического управления была устойчива , необходимо и достаточно ,
- 41. Критерий устойчивости Михайлова Кривые Михайлова 40
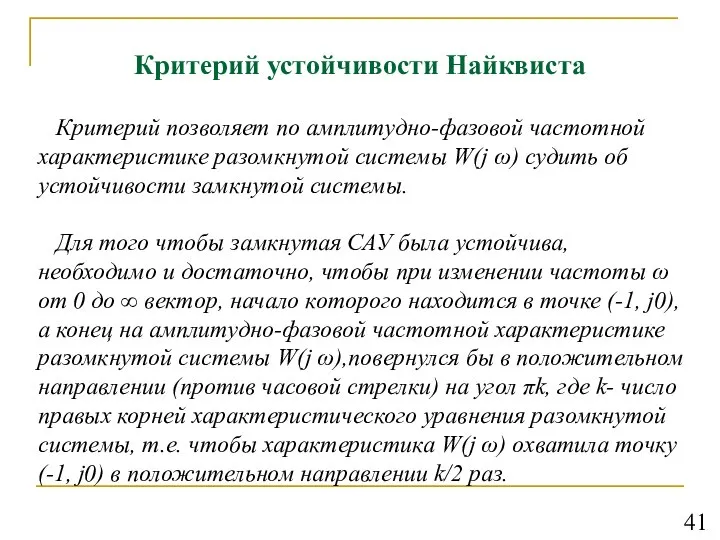
- 42. Критерий устойчивости Найквиста Критерий позволяет по амплитудно-фазовой частотной характеристике разомкнутой системы W(j ω) судить об устойчивости
- 43. Критерий устойчивости Найквиста Если k = 0 частотная характеристика не охватывает точку (-1,j0) , то система
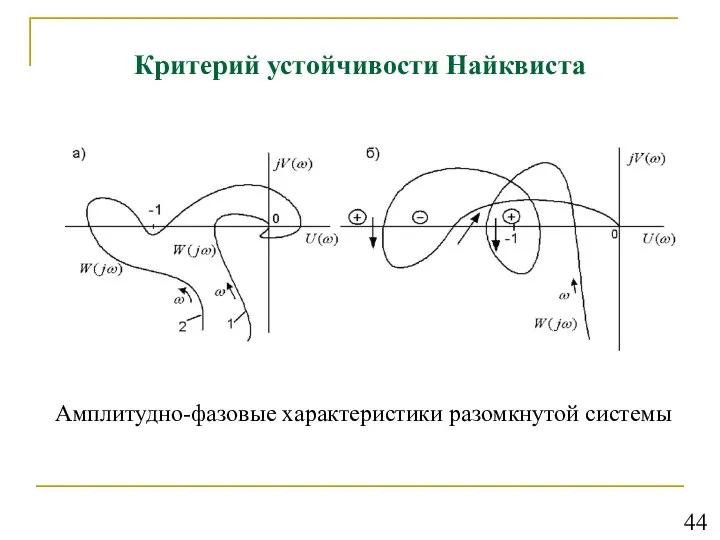
- 44. Критерий устойчивости Найквиста Амплитудно-фазовая характеристика разомкнутой системы 43
- 45. Критерий устойчивости Найквиста Амплитудно-фазовые характеристики разомкнутой системы 44
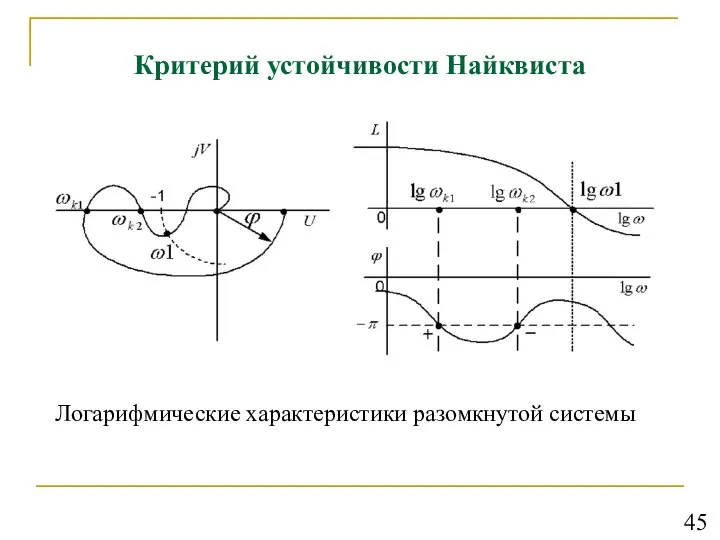
- 46. Критерий устойчивости Найквиста Логарифмические характеристики разомкнутой системы 45
- 47. Критерий устойчивости Гурвица Для устойчивой системы необходимо и достаточно, чтобы определитель и все главные диагональные миноры
- 48. Запасы устойчивости системы Годограф W(j ω) 47
- 49. Показатели качества 1) прямые - определяемые непосредственно по кривой переходного процесса, 2) корневые - определяемые по
- 50. Оценки качества переходной характеристики Формула Хевисайда Перерегулирование 49
- 51. Оценки качества переходной характеристики Формула Хевисайда Перерегулирование 50
- 52. Оценки качества переходной характеристики Переходная характеристика 51
- 53. Оценки качества переходной характеристики Степень затухания Статическая ошибка εст = х - xуст Время регулирования (время
- 54. Корневые показатели качества Степень устойчивости Степень колебательности 53
- 55. Типы регуляторов 1) П-регулятор (пропорциональный регулятор) W(s) = K 2) И-регулятор (интегрирующий регулятор) 3) Д-регулятор (дифференцирующий
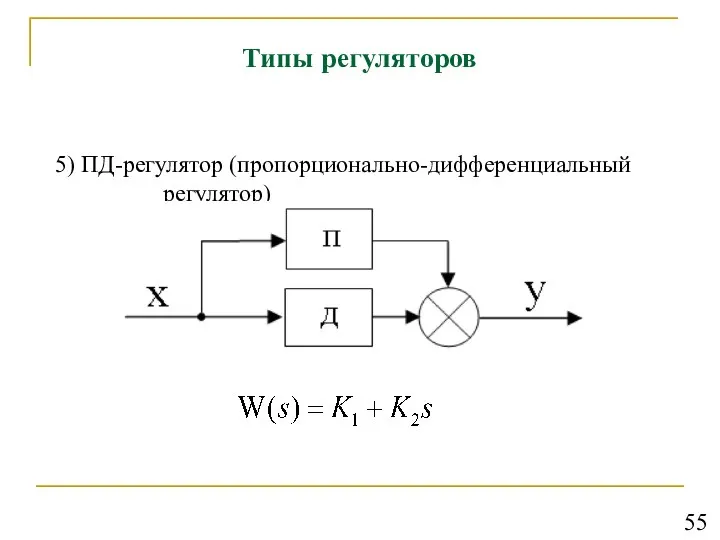
- 56. Типы регуляторов 5) ПД-регулятор (пропорционально-дифференциальный регулятор) 55
- 58. Скачать презентацию
Слайд 2Основы теории автоматического управления
Теория автоматического управления - наука, которая изучает процессы управления,
Основы теории автоматического управления
Теория автоматического управления - наука, которая изучает процессы управления,
Слайд 3Классификация САУ (САР)
Все системы автоматического управления и регулирования делятся на следующие основные
Классификация САУ (САР)
Все системы автоматического управления и регулирования делятся на следующие основные
Слайд 4Основные понятия ТАУ
Параметры технологического процесса - это физические величины, определяющие ход
Основные понятия ТАУ
Параметры технологического процесса - это физические величины, определяющие ход
Слайд 5Основные понятия ТАУ
Мгновенное значение – это значение регулируемой величины в рассматриваемый
Основные понятия ТАУ
Мгновенное значение – это значение регулируемой величины в рассматриваемый
Слайд 6Основные понятия ТАУ
Регулирование – это частный вид управления, когда задачей является
Основные понятия ТАУ
Регулирование – это частный вид управления, когда задачей является
Слайд 7Основные понятия ТАУ
Регулирование – это частный вид управления, когда задачей является
Основные понятия ТАУ
Регулирование – это частный вид управления, когда задачей является
Слайд 8Основные понятия ТАУ
G – задающее воздействие (входное воздействие Х) – воздействие на
Основные понятия ТАУ
G – задающее воздействие (входное воздействие Х) – воздействие на
Слайд 9Основные понятия ТАУ
Р – регулятор, это комплекс устройств, присоединяемых к регулируемому
Основные понятия ТАУ
Р – регулятор, это комплекс устройств, присоединяемых к регулируемому
Слайд 10Классификация САР
1. По назначению (по характеру изменения задания):
- стабилизирующая САР, это
Классификация САР
1. По назначению (по характеру изменения задания):
- стабилизирующая САР, это
Слайд 11Классификация САР
2. По количеству контуров:
- одноконтурные - содержащие один контур,
- многоконтурные -
Классификация САР
2. По количеству контуров:
- одноконтурные - содержащие один контур,
- многоконтурные -
Слайд 12Классификация САР
4. По функциональному назначению:
- температуры;
- давления;
- расхода;
- уровня;
- напряжения и т.д.
5.
Классификация САР
4. По функциональному назначению:
- температуры;
- давления;
- расхода;
- уровня;
- напряжения и т.д.
5.
Слайд 13Классификация САР
Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий,
Классификация САР
Принцип суперпозиции (наложения): Если на вход объекта подается несколько входных воздействий,
Слайд 14Классификация элементов САР
1. По функциональному назначению:
- измерительные,
- усилительно-преобразовательные,
- исполнительные,
- корректирующие.
2. По виду
Классификация элементов САР
1. По функциональному назначению:
- измерительные,
- усилительно-преобразовательные,
- исполнительные,
- корректирующие.
2. По виду
Слайд 15Классификация элементов САР
3. По наличию или отсутствию вспомогательного источника энергии:
- активные (с
Классификация элементов САР
3. По наличию или отсутствию вспомогательного источника энергии:
- активные (с
Слайд 16Классификация элементов САР
5. По поведению в статическом режиме:
- статические, это системы в
Классификация элементов САР
5. По поведению в статическом режиме:
- статические, это системы в
Слайд 17Характеристики и модели элементов и систем
Статической характеристикой элемента называется зависимость
Характеристики и модели элементов и систем
Статической характеристикой элемента называется зависимость
Слайд 18Характеристики и модели элементов и систем
Астатическим называется элемент, у которого
Характеристики и модели элементов и систем
Астатическим называется элемент, у которого
Слайд 19Характеристики и модели элементов и систем
САР называется статической, если при постоянном
Характеристики и модели элементов и систем
САР называется статической, если при постоянном
Слайд 20Динамические характеристики
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие
Динамические характеристики
Переходной характеристикой h(t) называется реакция объекта на единичное ступенчатое воздействие
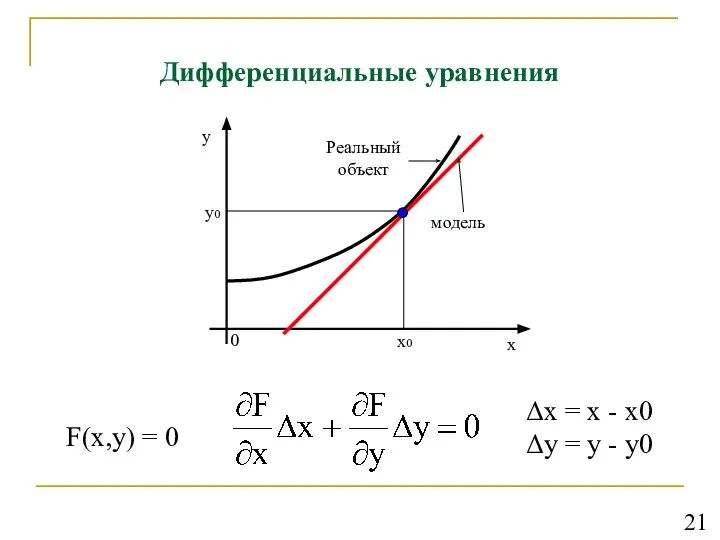
Слайд 21Дифференциальные уравнения
Любые процессы передачи, обмена, преобразования энергии и вещества математически
Дифференциальные уравнения
Любые процессы передачи, обмена, преобразования энергии и вещества математически
Слайд 22Дифференциальные уравнения
Δх = х - х0
Δу = у - у0
F(х,у)
Дифференциальные уравнения
Δх = х - х0
Δу = у - у0
F(х,у)
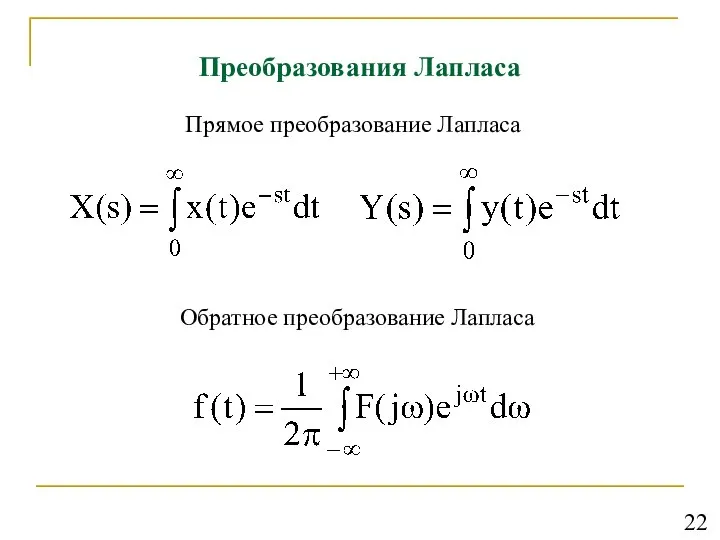
Слайд 23Преобразования Лапласа
Прямое преобразование Лапласа
Обратное преобразование Лапласа
22
Преобразования Лапласа
Прямое преобразование Лапласа
Обратное преобразование Лапласа
22
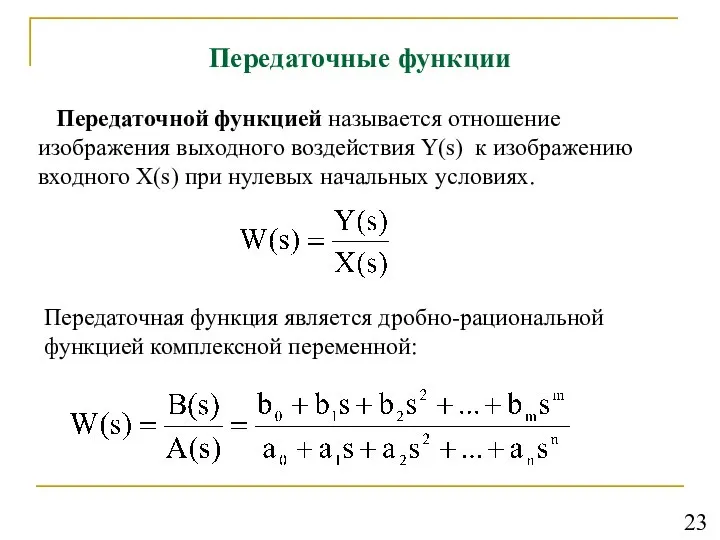
Слайд 24Передаточные функции
Передаточной функцией называется отношение изображения выходного воздействия Y(s) к
Передаточные функции
Передаточной функцией называется отношение изображения выходного воздействия Y(s) к
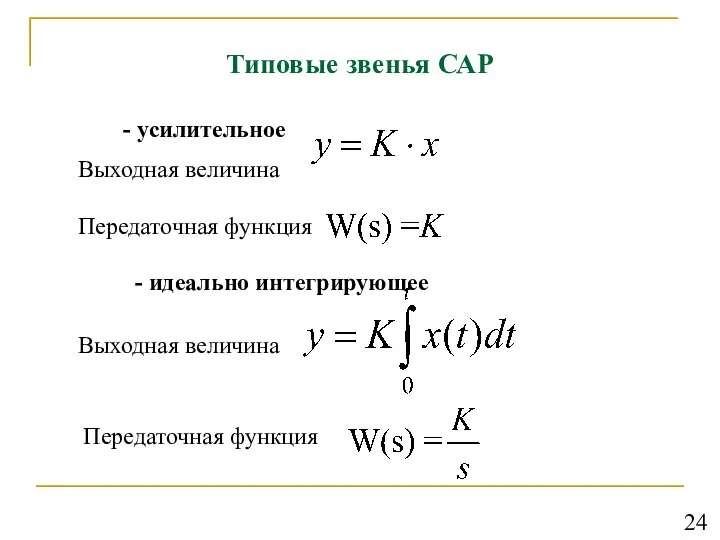
Слайд 25Типовые звенья САР
- усилительное
Передаточная функция
- идеально интегрирующее
Передаточная функция
Выходная величина
Выходная величина
24
Типовые звенья САР
- усилительное
Передаточная функция
- идеально интегрирующее
Передаточная функция
Выходная величина
Выходная величина
24
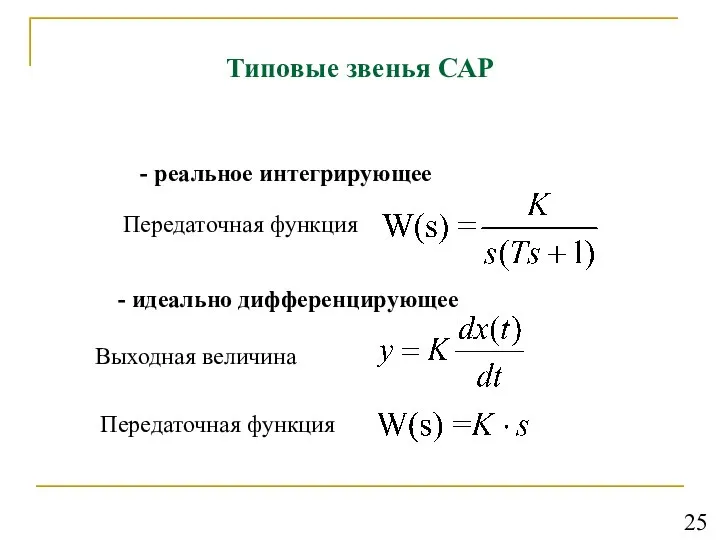
Слайд 26Типовые звенья САР
- реальное интегрирующее
Передаточная функция
- идеально дифференцирующее
Передаточная функция
Выходная
Типовые звенья САР
- реальное интегрирующее
Передаточная функция
- идеально дифференцирующее
Передаточная функция
Выходная
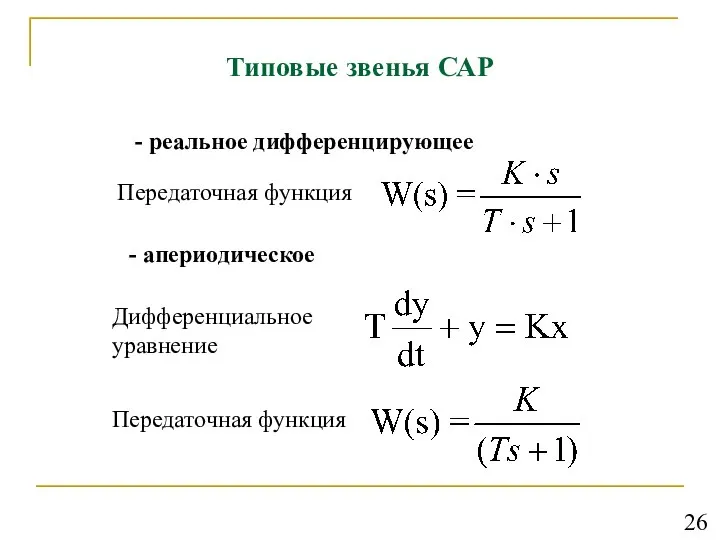
Слайд 27Типовые звенья САР
- реальное дифференцирующее
Передаточная функция
- апериодическое
Передаточная функция
Дифференциальное
Типовые звенья САР
- реальное дифференцирующее
Передаточная функция
- апериодическое
Передаточная функция
Дифференциальное
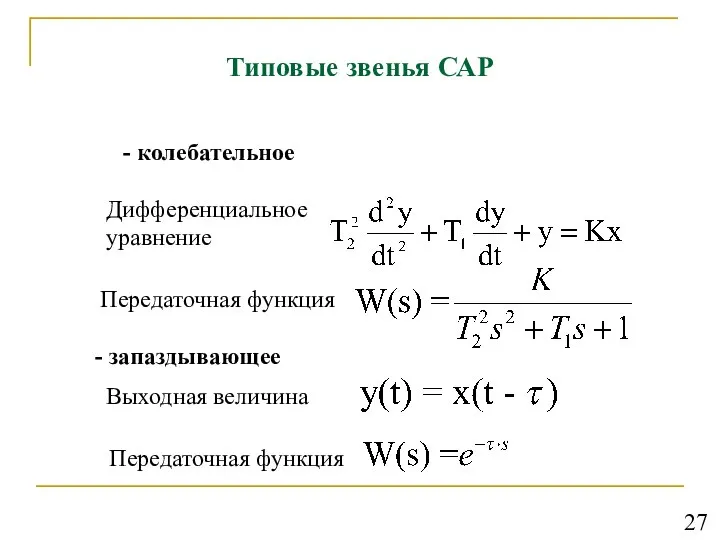
Слайд 28Типовые звенья САР
- колебательное
Передаточная функция
- запаздывающее
Передаточная функция
Дифференциальное уравнение
Выходная величина
27
Типовые звенья САР
- колебательное
Передаточная функция
- запаздывающее
Передаточная функция
Дифференциальное уравнение
Выходная величина
27
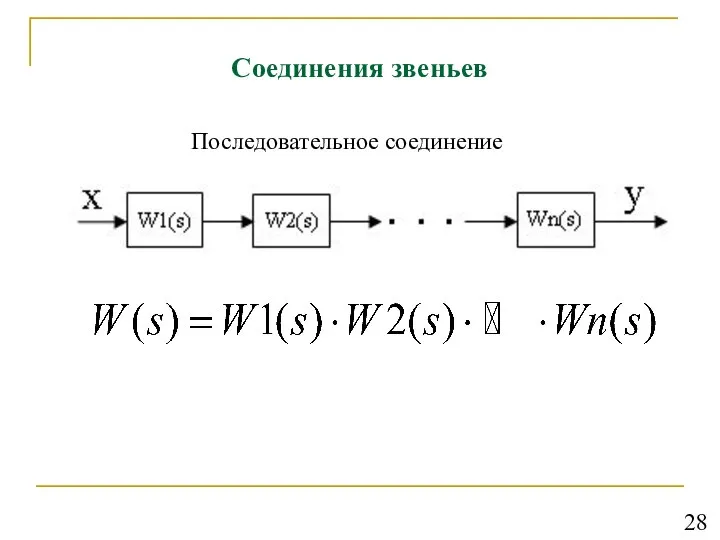
Слайд 29Соединения звеньев
Последовательное соединение
28
Соединения звеньев
Последовательное соединение
28
Слайд 30Соединения звеньев
Параллельное соединение
29
Соединения звеньев
Параллельное соединение
29
Слайд 31Соединения звеньев
Обратная связь
«+» соответствует отрицательной ОС
«-» - положительной.
30
Соединения звеньев
Обратная связь
«+» соответствует отрицательной ОС
«-» - положительной.
30
Слайд 32Передаточные функции САР
1) Для нахождения передаточной функции CAP в разомкнутом состоянии необходимо
Передаточные функции САР
1) Для нахождения передаточной функции CAP в разомкнутом состоянии необходимо
Слайд 33Ошибка системы
32
Ошибка системы
32
Слайд 34Коэффициенты ошибок
33
Коэффициенты ошибок
33
Слайд 35Коэффициенты ошибок
Коэффициент С0 принято называть коэффициентом статической или позиционной ошибки; коэффициент С1
Коэффициенты ошибок
Коэффициент С0 принято называть коэффициентом статической или позиционной ошибки; коэффициент С1
Слайд 36Коэффициенты ошибок
35
Коэффициенты ошибок
35
Слайд 37Критерий устойчивости Михайлова
Характеристический полином
36
Критерий устойчивости Михайлова
Характеристический полином
36
Слайд 38Критерий устойчивости Михайлова
При изменении частоты ω вектор D(jω), изменяясь по
Критерий устойчивости Михайлова
При изменении частоты ω вектор D(jω), изменяясь по
Слайд 39Критерий устойчивости Михайлова
38
Критерий устойчивости Михайлова
38
Слайд 40Критерий устойчивости Михайлова
Для того чтобы система автоматического управления была устойчива
Критерий устойчивости Михайлова
Для того чтобы система автоматического управления была устойчива
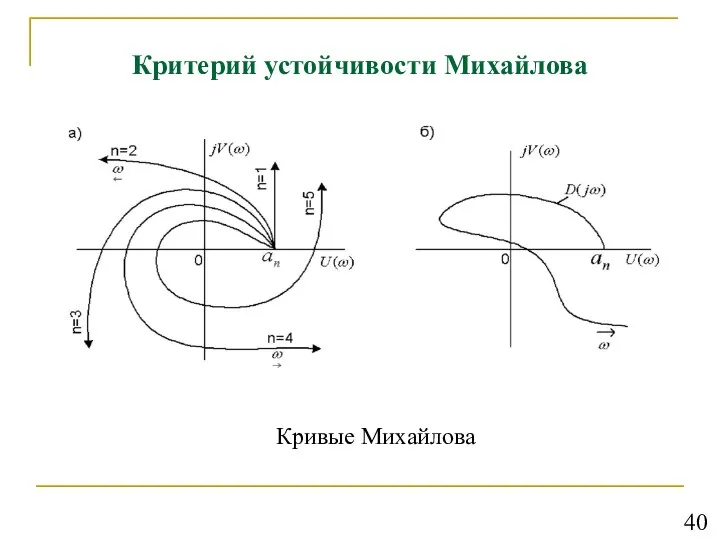
Слайд 41Критерий устойчивости Михайлова
Кривые Михайлова
40
Критерий устойчивости Михайлова
Кривые Михайлова
40
Слайд 42Критерий устойчивости Найквиста
Критерий позволяет по амплитудно-фазовой частотной характеристике разомкнутой системы
Критерий устойчивости Найквиста
Критерий позволяет по амплитудно-фазовой частотной характеристике разомкнутой системы
Слайд 43Критерий устойчивости Найквиста
Если k = 0 частотная характеристика не охватывает
Критерий устойчивости Найквиста
Если k = 0 частотная характеристика не охватывает
Слайд 44Критерий устойчивости Найквиста
Амплитудно-фазовая характеристика разомкнутой системы
43
Критерий устойчивости Найквиста
Амплитудно-фазовая характеристика разомкнутой системы
43

Слайд 45Критерий устойчивости Найквиста
Амплитудно-фазовые характеристики разомкнутой системы
44
Критерий устойчивости Найквиста
Амплитудно-фазовые характеристики разомкнутой системы
44
Слайд 46Критерий устойчивости Найквиста
Логарифмические характеристики разомкнутой системы
45
Критерий устойчивости Найквиста
Логарифмические характеристики разомкнутой системы
45
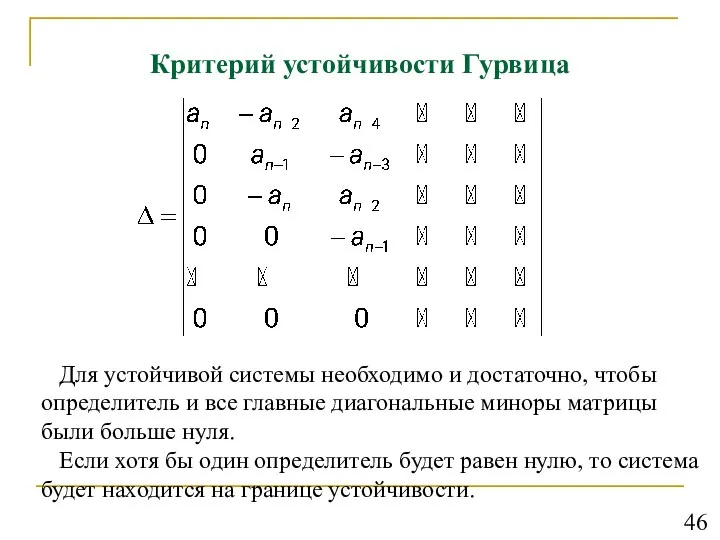
Слайд 47Критерий устойчивости Гурвица
Для устойчивой системы необходимо и достаточно, чтобы определитель
Критерий устойчивости Гурвица
Для устойчивой системы необходимо и достаточно, чтобы определитель
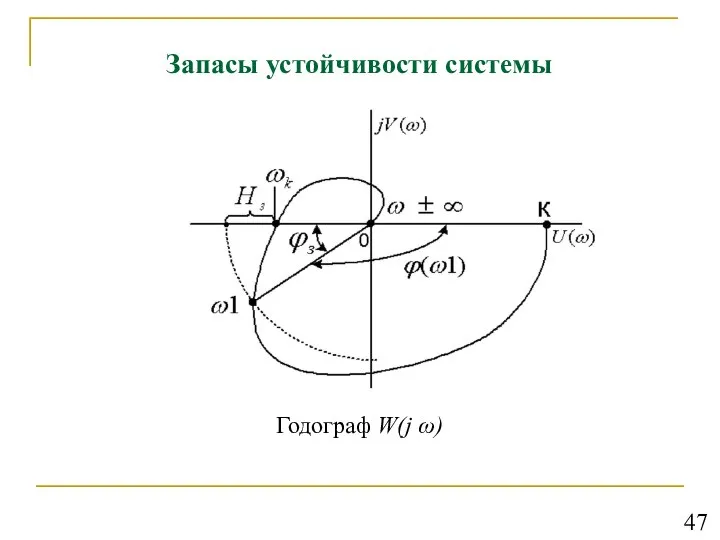
Слайд 48Запасы устойчивости системы
Годограф W(j ω)
47
Запасы устойчивости системы
Годограф W(j ω)
47
Слайд 49Показатели качества
1) прямые - определяемые непосредственно по кривой переходного процесса,
2) корневые -
Показатели качества
1) прямые - определяемые непосредственно по кривой переходного процесса,
2) корневые -
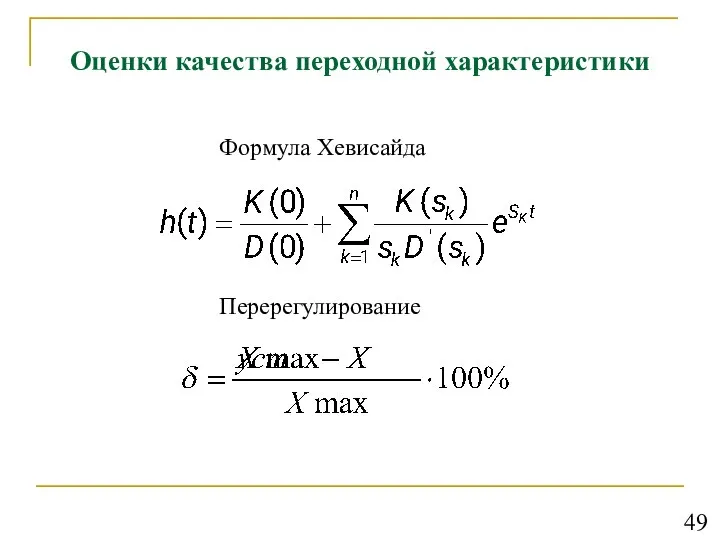
Слайд 50Оценки качества переходной характеристики
Формула Хевисайда
Перерегулирование
49
Оценки качества переходной характеристики
Формула Хевисайда
Перерегулирование
49
Слайд 51Оценки качества переходной характеристики
Формула Хевисайда
Перерегулирование
50
Оценки качества переходной характеристики
Формула Хевисайда
Перерегулирование
50
Слайд 52Оценки качества переходной характеристики
Переходная характеристика
51
Оценки качества переходной характеристики
Переходная характеристика
51

Слайд 53Оценки качества переходной характеристики
Степень затухания
Статическая ошибка
εст = х - xуст
Время
Оценки качества переходной характеристики
Степень затухания
Статическая ошибка
εст = х - xуст
Время
Слайд 54Корневые показатели качества
Степень устойчивости
Степень колебательности
53
Корневые показатели качества
Степень устойчивости
Степень колебательности
53
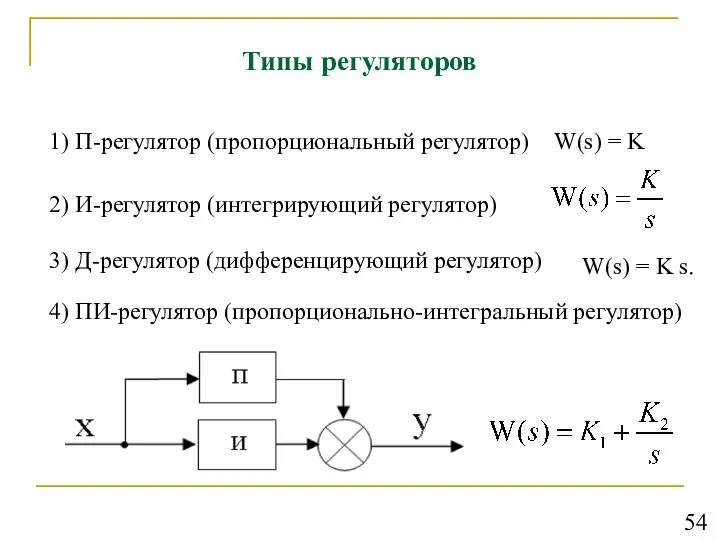
Слайд 55Типы регуляторов
1) П-регулятор (пропорциональный регулятор)
W(s) = K
2) И-регулятор (интегрирующий регулятор)
Типы регуляторов
1) П-регулятор (пропорциональный регулятор)
W(s) = K
2) И-регулятор (интегрирующий регулятор)
Слайд 56Типы регуляторов
5) ПД-регулятор (пропорционально-дифференциальный
регулятор)
55
Типы регуляторов
5) ПД-регулятор (пропорционально-дифференциальный
регулятор)
55
 Skoda. Трансмиссии АВ530/531. Рабочая тетрадь
Skoda. Трансмиссии АВ530/531. Рабочая тетрадь Презентация на тему Электрическая цепь и её составные части
Презентация на тему Электрическая цепь и её составные части  Радиационно-акустический измерительный датчик тока
Радиационно-акустический измерительный датчик тока Оптические приборы
Оптические приборы Колебательный контур. Превращение энергии при электромагнитных колебаниях
Колебательный контур. Превращение энергии при электромагнитных колебаниях Относительность движения
Относительность движения Наноматериалы, нанотехнологии в области технического обслуживания и ремонта транспортных средств
Наноматериалы, нанотехнологии в области технического обслуживания и ремонта транспортных средств Моя профессия - тракторист-машинист
Моя профессия - тракторист-машинист Презентация-ФТП (Тема3-деф и разруш)-17
Презентация-ФТП (Тема3-деф и разруш)-17 Урок 20 Світловий промінь і світловий пучок
Урок 20 Світловий промінь і світловий пучок Проводники с током в магнитном поле. Теорема Гаусса для магнитного поля
Проводники с током в магнитном поле. Теорема Гаусса для магнитного поля Посадочный размер блока. Диаметр ТЭНа
Посадочный размер блока. Диаметр ТЭНа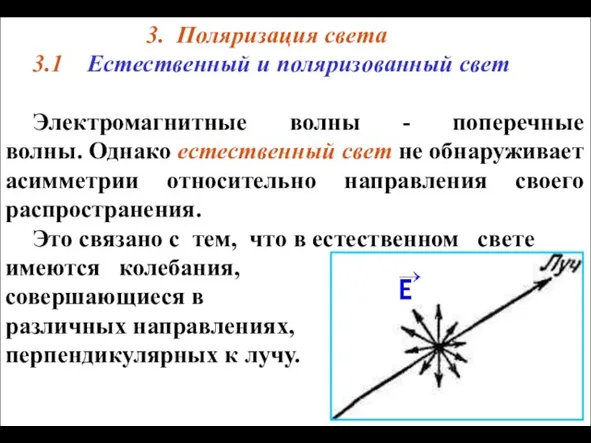 Поляризация света
Поляризация света Модель машины
Модель машины Особенности конструкции пневматической регулируемой подвески автомобилей
Особенности конструкции пневматической регулируемой подвески автомобилей Аэродинамика Т 5-1
Аэродинамика Т 5-1 Презентация на тему Расчёт пути и времени движения
Презентация на тему Расчёт пути и времени движения  Блок контроля
Блок контроля Работа и мощность тока. Задачи
Работа и мощность тока. Задачи Ремонт деталей машин с применением полимерных материалов
Ремонт деталей машин с применением полимерных материалов Свободное падение
Свободное падение Колебания. Лекция № 8
Колебания. Лекция № 8 Презентация на тему Масса Плотность вещества
Презентация на тему Масса Плотность вещества  Давление. Единицы давления
Давление. Единицы давления Презентация на тему Методы наблюдения и регистрации элементарных частиц
Презентация на тему Методы наблюдения и регистрации элементарных частиц  Основы квантовой физики
Основы квантовой физики Работа по перемещению заряда в электрическом поле
Работа по перемещению заряда в электрическом поле Квантовая биофизика
Квантовая биофизика