- Численные методы и оптимизация траекторий межпланетных траекторий

Содержание
- 2. Задачи, поставленные на второй семестр Суть нашего проекта заключается в моделировании и оптимизации траектории полетов космических
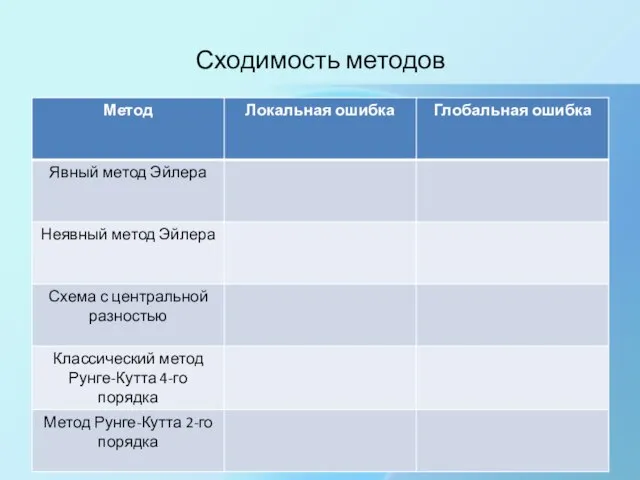
- 3. Сходимость методов
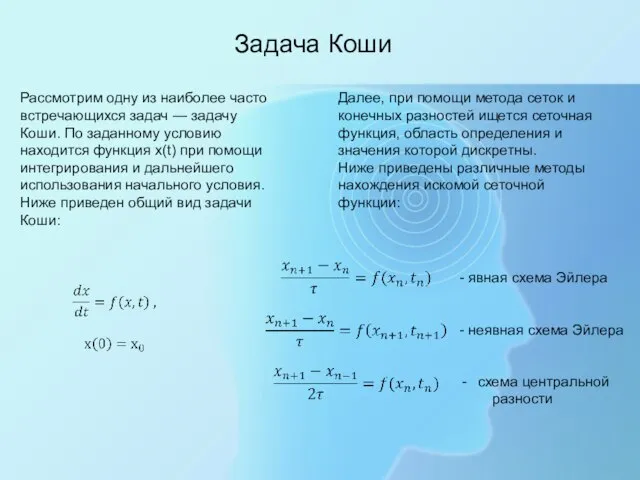
- 4. Задача Коши Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По заданному условию находится
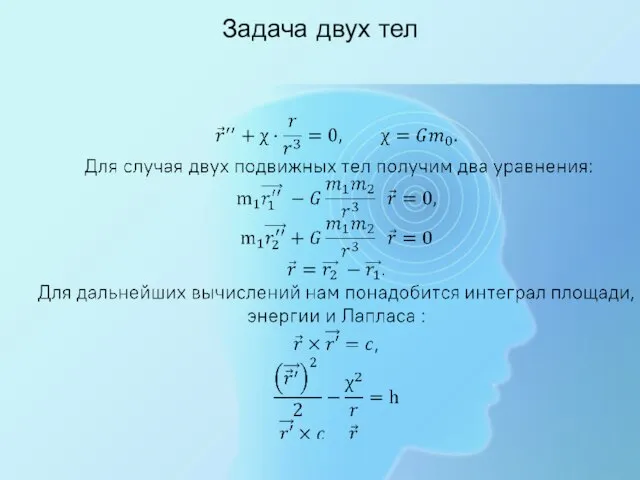
- 5. Задача двух тел
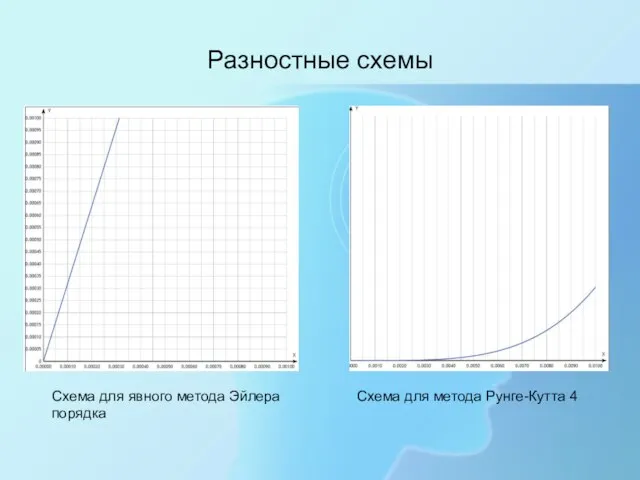
- 6. Разностные схемы Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
- 7. Список литературы [1] Федоренко Р.П., «Введение в вычислительную физику». – 1994 [2] Калиткин Н.Н., «Численные методы».
- 9. Процесс решения задачи Построение математической модели заданного физического процесса Компьютерное моделирование процесса при помощи построенной математической
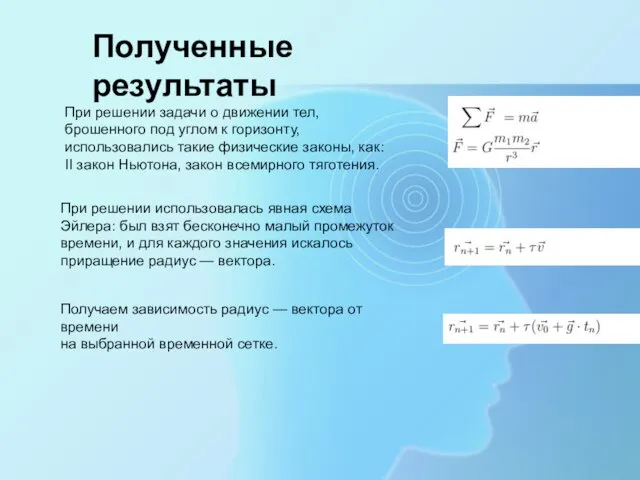
- 10. Полученные результаты При решении задачи о движении тел, брошенного под углом к горизонту, использовались такие физические
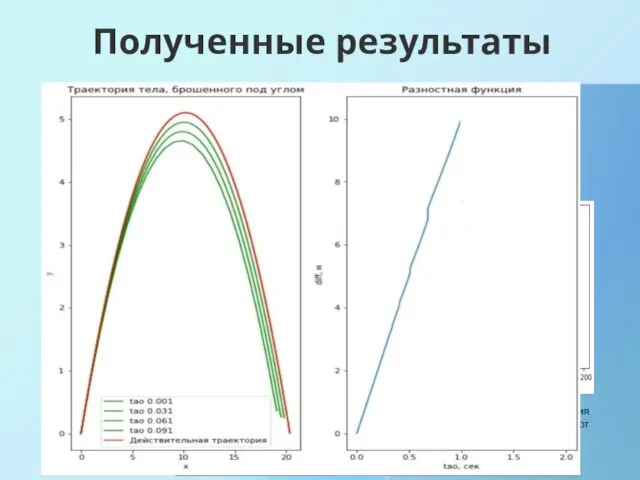
- 11. Полученные результаты Полученная численными методами траектория Зависимость максимального отклонения численного и аналитических решений от величины разбиения
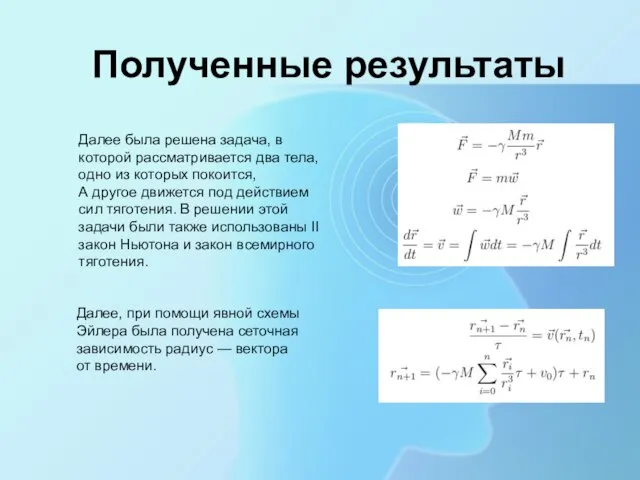
- 12. Полученные результаты Далее была решена задача, в которой рассматривается два тела, одно из которых покоится, А
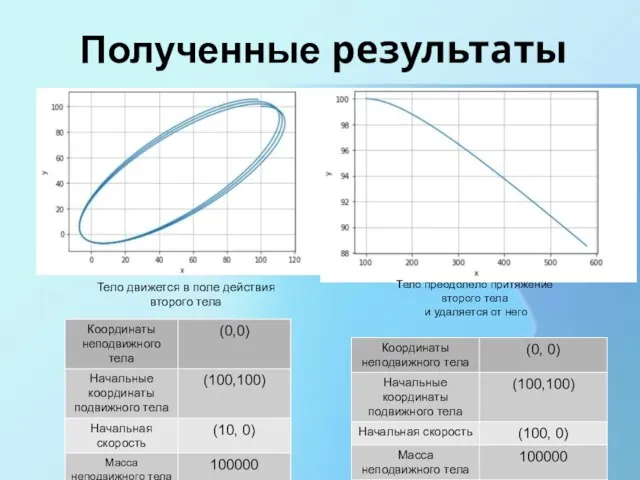
- 13. Полученные результаты Тело движется в поле действия второго тела Тело преодолело притяжение второго тела и удаляется
- 14. В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка следующая: даны два тела,
- 15. Задача двух тел
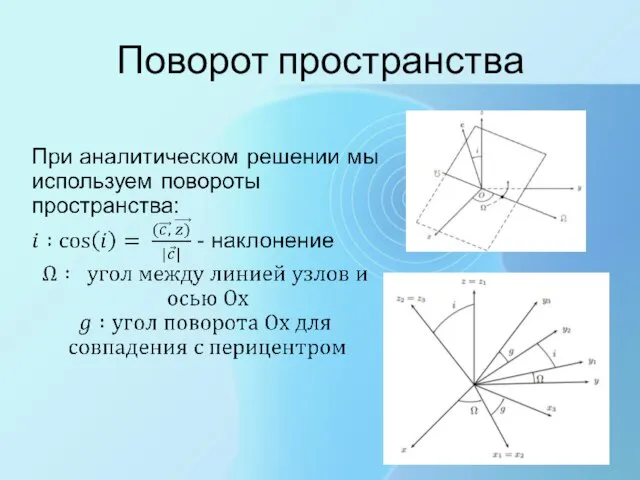
- 16. Поворот пространства
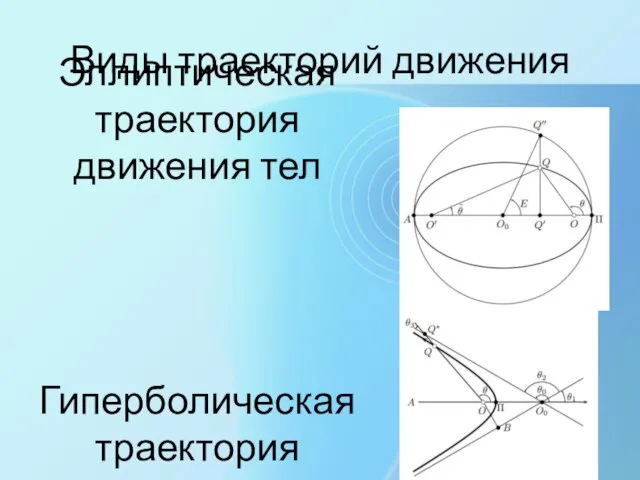
- 17. Виды траекторий движения Эллиптическая траектория движения тел Гиперболическая траектория движения тел
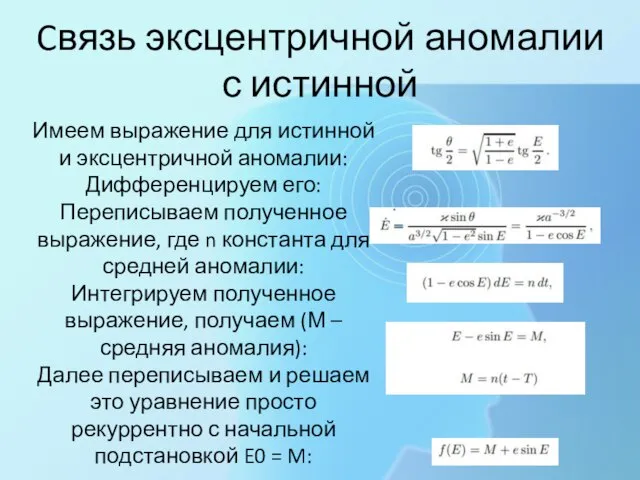
- 18. Имеем выражение для истинной и эксцентричной аномалии: Дифференцируем его: Переписываем полученное выражение, где n константа для
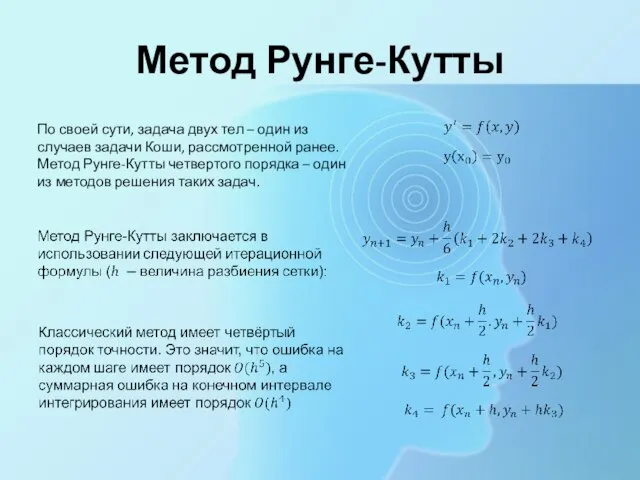
- 19. По своей сути, задача двух тел – один из случаев задачи Коши, рассмотренной ранее. Метод Рунге-Кутты
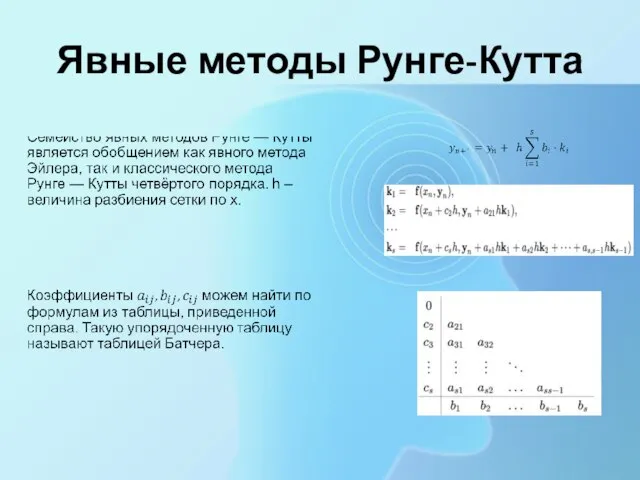
- 20. Явные методы Рунге-Кутта
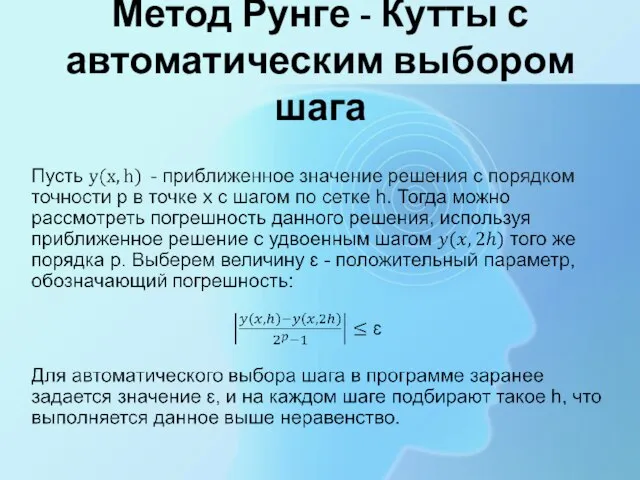
- 21. Метод Рунге - Кутты с автоматическим выбором шага
- 23. Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при
- 24. Прямой метод решения задачи оптимизации траектории состоит из двух этапов: 1) Непосредственно дискретизировать задачу оптимизации траектории,
- 25. Одиночная стрельба – ограничение дефекта на всем сегменте Многократная стрельба – ограничение дефекта на множестве сегментов
- 27. Скачать презентацию
Слайд 2Задачи, поставленные на второй семестр
Суть нашего проекта заключается в моделировании и оптимизации
Задачи, поставленные на второй семестр
Суть нашего проекта заключается в моделировании и оптимизации

Слайд 3Сходимость методов
Сходимость методов
Слайд 4Задача Коши
Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По
Задача Коши
Рассмотрим одну из наиболее часто встречающихся задач — задачу Коши. По
Слайд 5
Задача двух тел
Задача двух тел
Слайд 6Разностные схемы
Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
Разностные схемы
Схема для явного метода Эйлера Схема для метода Рунге-Кутта 4 порядка
Слайд 7
Список литературы
[1] Федоренко Р.П., «Введение в вычислительную физику». – 1994
[2] Калиткин
Список литературы
[1] Федоренко Р.П., «Введение в вычислительную физику». – 1994
[2] Калиткин
![Список литературы [1] Федоренко Р.П., «Введение в вычислительную физику». – 1994 [2]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/851939/slide-6.jpg)
Слайд 9 Процесс решения задачи
Построение математической модели заданного физического процесса
Компьютерное моделирование процесса при
Процесс решения задачи
Построение математической модели заданного физического процесса
Компьютерное моделирование процесса при
Слайд 10Полученные результаты
При решении задачи о движении тел, брошенного под углом к горизонту,
Полученные результаты
При решении задачи о движении тел, брошенного под углом к горизонту,
Слайд 11 Полученные результаты
Полученная численными методами траектория
Зависимость максимального отклонения
численного и аналитических решений от
Полученные результаты
Полученная численными методами траектория
Зависимость максимального отклонения
численного и аналитических решений от
Слайд 12Полученные результаты
Далее была решена задача, в которой рассматривается два тела, одно из
Полученные результаты
Далее была решена задача, в которой рассматривается два тела, одно из
Слайд 13Полученные результаты
Тело движется в поле действия
второго тела
Тело преодолело притяжение
второго тела
и
Полученные результаты
Тело движется в поле действия
второго тела
Тело преодолело притяжение
второго тела
и
Слайд 14В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка
В данный момент мы решаем, так называемую, задачу двух тел. Её формулировка
Слайд 15
Задача двух тел
Задача двух тел
Слайд 16Поворот пространства
Поворот пространства
Слайд 17Виды траекторий движения
Эллиптическая траектория движения тел
Гиперболическая траектория движения тел
Виды траекторий движения
Эллиптическая траектория движения тел
Гиперболическая траектория движения тел
Слайд 18Имеем выражение для истинной и эксцентричной аномалии:
Дифференцируем его:
Переписываем полученное выражение, где n
Имеем выражение для истинной и эксцентричной аномалии:
Дифференцируем его:
Переписываем полученное выражение, где n
Слайд 19По своей сути, задача двух тел – один из случаев задачи Коши,
По своей сути, задача двух тел – один из случаев задачи Коши,
Слайд 20
Явные методы Рунге-Кутта
Явные методы Рунге-Кутта
Слайд 21
Метод Рунге - Кутты с автоматическим выбором шага
Метод Рунге - Кутты с автоматическим выбором шага
Слайд 23Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при соблюдении
Оптимизация траектории - процесс проектирования траектории, который сводит к минимуму (или максимизирует) некоторую меру производительности при соблюдении
Слайд 24Прямой метод решения задачи оптимизации траектории состоит из двух этапов:
1) Непосредственно
Прямой метод решения задачи оптимизации траектории состоит из двух этапов:
1) Непосредственно
Слайд 25Одиночная стрельба – ограничение дефекта на всем сегменте
Многократная стрельба – ограничение дефекта
Одиночная стрельба – ограничение дефекта на всем сегменте
Многократная стрельба – ограничение дефекта
 Пневматика
Пневматика Виды излучений и спектров. Шкала электромагнитных волн
Виды излучений и спектров. Шкала электромагнитных волн Внутренняя энергия. Работа в термодинамике. Количество теплоты
Внутренняя энергия. Работа в термодинамике. Количество теплоты Теоретические основы электротехники. Теория электромагнитного поля
Теоретические основы электротехники. Теория электромагнитного поля Двигатель внутреннего сгорания (ДВС)
Двигатель внутреннего сгорания (ДВС) Потенциальная энергия
Потенциальная энергия Презентация на тему Свободное падение
Презентация на тему Свободное падение  Презентация на тему Производство и передача электроэнергии
Презентация на тему Производство и передача электроэнергии  Тепло. Плавление
Тепло. Плавление Презентация на тему Механическая энергия. Закон сохранения энергии
Презентация на тему Механическая энергия. Закон сохранения энергии  Презентация на тему Исследование силы трения скольжения
Презентация на тему Исследование силы трения скольжения  Механические колебания
Механические колебания Неинерциальные системы отсчета. Преобразования Галилея. Преобразования Лоренца
Неинерциальные системы отсчета. Преобразования Галилея. Преобразования Лоренца Циклогенез и антициклогенез. Гидродинамическая теория
Циклогенез и антициклогенез. Гидродинамическая теория Три состояния вещества
Три состояния вещества Принципы автоматического управления пуском и торможением двигателя
Принципы автоматического управления пуском и торможением двигателя Формирование у детей представления о физическом явлении. Звук
Формирование у детей представления о физическом явлении. Звук Радіо. Історія виникнення радіозв'язку
Радіо. Історія виникнення радіозв'язку Электромагнитные индукции
Электромагнитные индукции Квантовая теория. Свойства операторов и принцип неопределенности Гейзенберга
Квантовая теория. Свойства операторов и принцип неопределенности Гейзенберга Презентация на тему Спектры . Спектральный анализ. Спектральные аппараты
Презентация на тему Спектры . Спектральный анализ. Спектральные аппараты  Конструкция самолета и безколлекторный двигатель
Конструкция самолета и безколлекторный двигатель Решение задач по теме Электромагнитная индукция
Решение задач по теме Электромагнитная индукция Резонансы в электрических цепях
Резонансы в электрических цепях Магнитное поле в веществе
Магнитное поле в веществе Нейтронное излучение: опасности и перспективы
Нейтронное излучение: опасности и перспективы Введение. Тест
Введение. Тест Электромагнитные колебания и волны 11 класс
Электромагнитные колебания и волны 11 класс