- Физика

Содержание
- 2. (Элементарная) ФИЗИКА (для ПриМатов и Программистов)
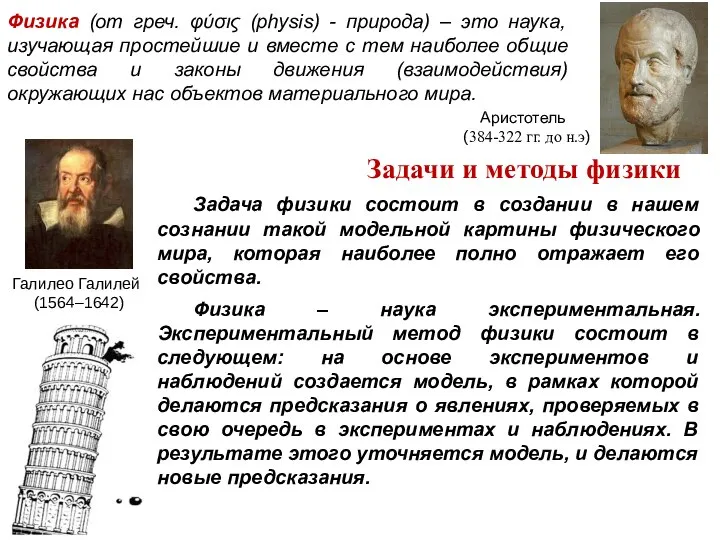
- 3. Физика (от греч. φύσις (physis) - природа) – это наука, изучающая простейшие и вместе с тем
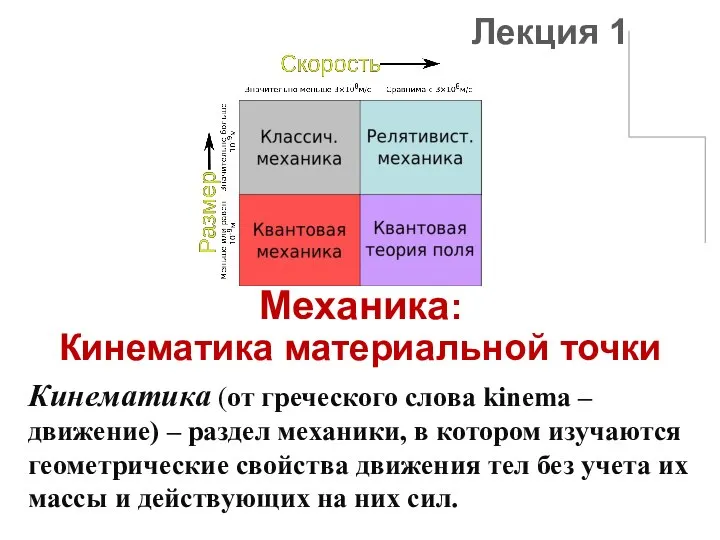
- 4. Лекция 1 Механика: Кинематика материальной точки Кинематика (от греческого слова kinema – движение) – раздел механики,
- 5. Модель – абстрактная система, являющаяся упрощенной копией реальной системы. Материальная точка – тело, размерами которого можно
- 6. Положение материальной точки определяется по отношению к какому-либо другому произвольно выбранному телу. Всякое движение относительно, поэтому
- 7. Приборы, служащие для определения положения движущегося тела – линейка и т.п. Прибор, служащий для определения времени
- 8. Тело отсчета, связанная с ним система координат, линейка, часы и приборы для синхронизации часов составляют пространственно-временную
- 9. В кинематике решаются две основные задачи: прямая и обратная. При решении прямой задачи по известному закону
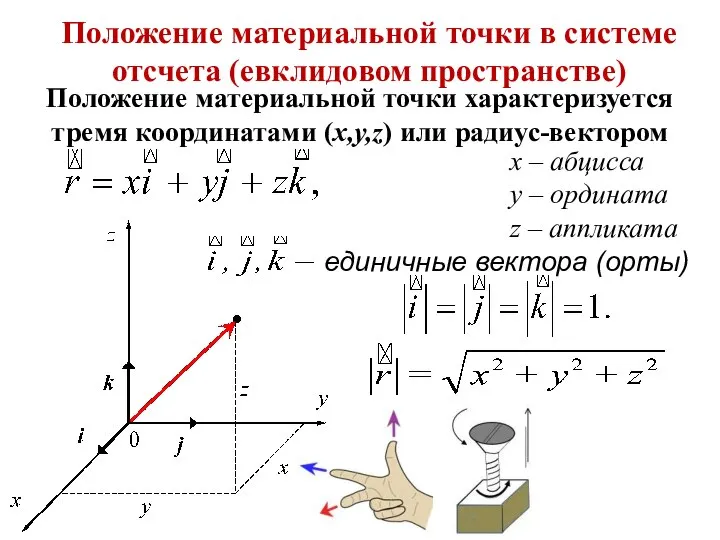
- 10. Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором единичные вектора (орты) x – абцисса y
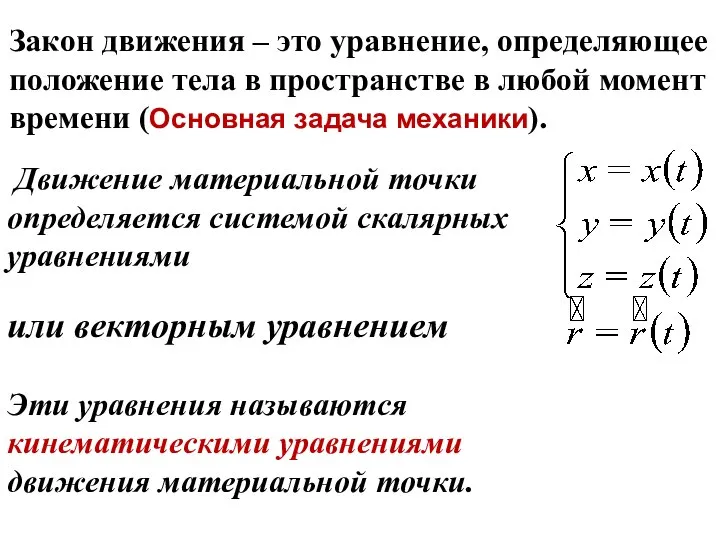
- 12. Движение материальной точки определяется системой скалярных уравнениями или векторным уравнением Эти уравнения называются кинематическими уравнениями движения
- 13. Траектория точки. Длина пути. Вектор перемещения (перемещение). Принцип независимости движения Число независимых координат, полностью определяющих положение
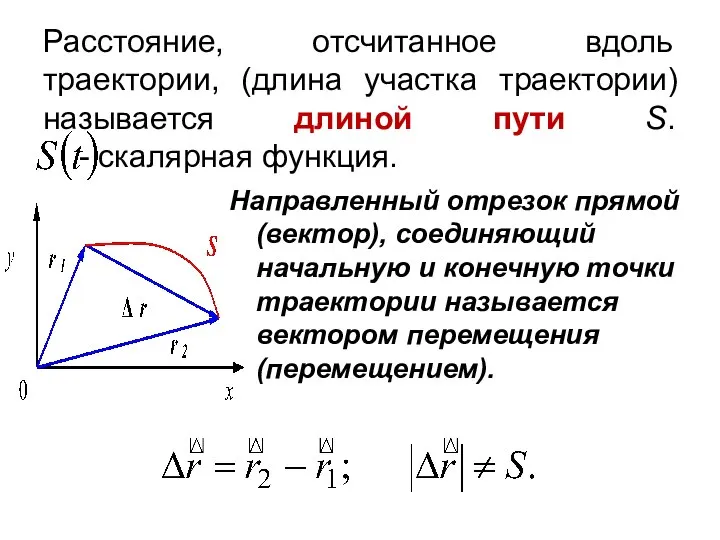
- 14. Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S. - скалярная функция. Направленный отрезок
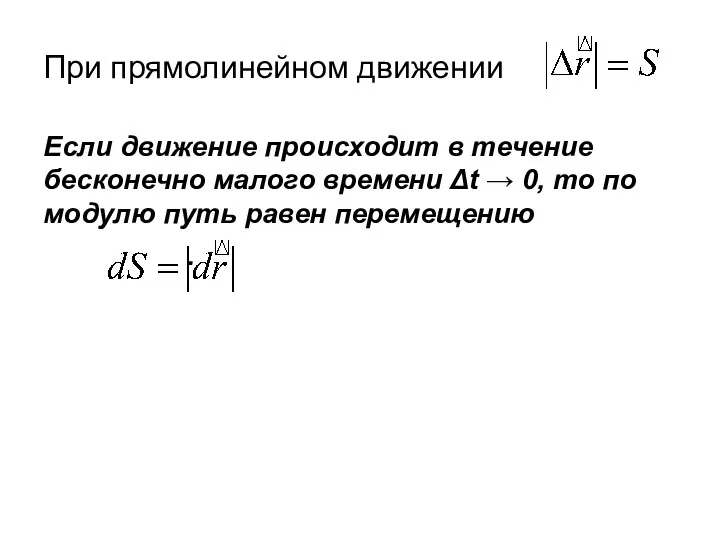
- 15. При прямолинейном движении Если движение происходит в течение бесконечно малого времени Δt → 0, то по
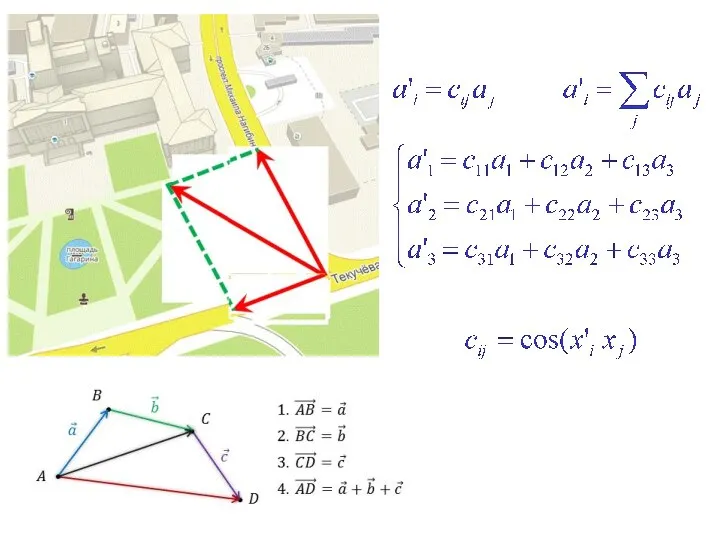
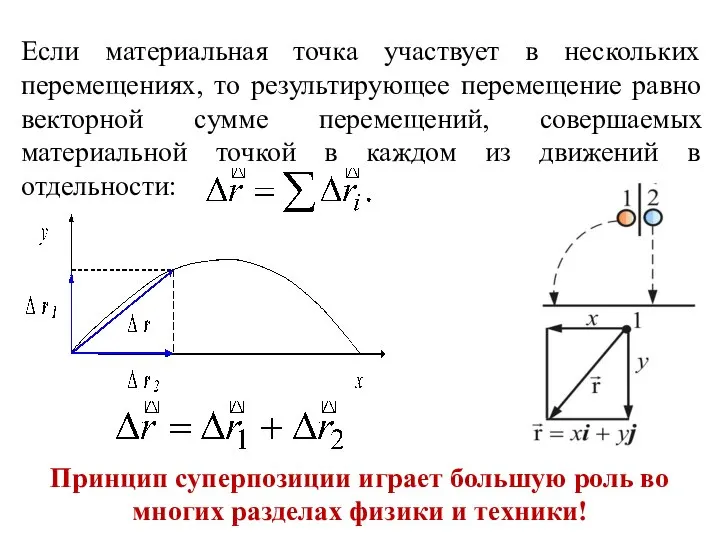
- 16. Если материальная точка участвует в нескольких перемещениях, то результирующее перемещение равно векторной сумме перемещений, совершаемых материальной
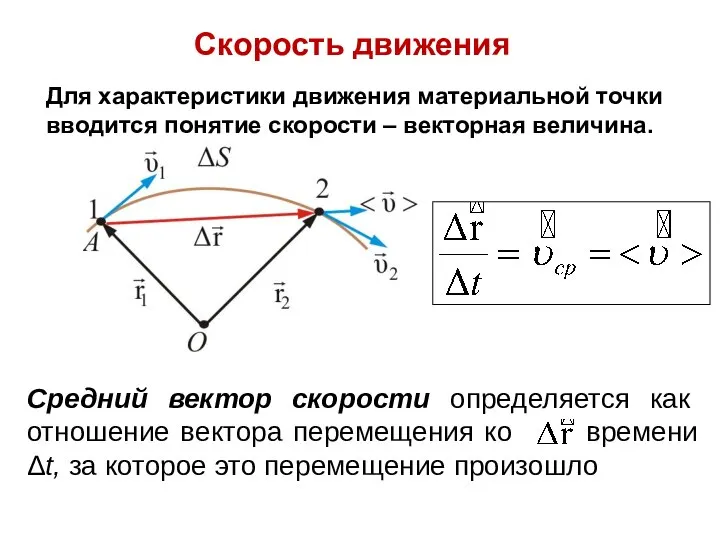
- 17. Скорость движения Для характеристики движения материальной точки вводится понятие скорости – векторная величина. Средний вектор скорости
- 18. Мгновенная скорость материальной точки – векторная величина, равная первой производной радиус-вектора движущейся точки по времени. ,
- 19. В математике производной функции в точке x0 называется предел отношения изменения функции Δy в этой точке
- 20. Геометрический смысл производной: α
- 21. Физический смысл производной: это среднее значение изменения функции на таком интервале, на котором среднее значение функции
- 22. Неравномерное движение Средняя скорость неравномерного движения – скалярная величина. Средняя скорость больше модуля вектора средней скорости.
- 23. Вычисление пройденного пути. Понятие об интеграле υ i – мгновенная скорость.
- 24. Физический смысл интеграла – бесконечно большая сумма бесконечно малых слагаемых. Геометрический смысл интеграла – площадь под
- 25. Средняя скорость прохождения пути Средняя скорость неравномерного движения – средняя скорость такого равномерного движения, при котором
- 26. Ускорение Мгновенное ускорение
- 27. Модуль среднего ускорения: Ускорение движения материальной точки это первая производная от вектора скорости по времени или
- 28. Понятие о кривизне Δφ - угол между касательными в точках, отстоящих друг от друга на расстоянии
- 29. Кривизна траектории характеризует скорость поворота касательной при движении или степень искривленности кривой. Радиус кривизны траектории в
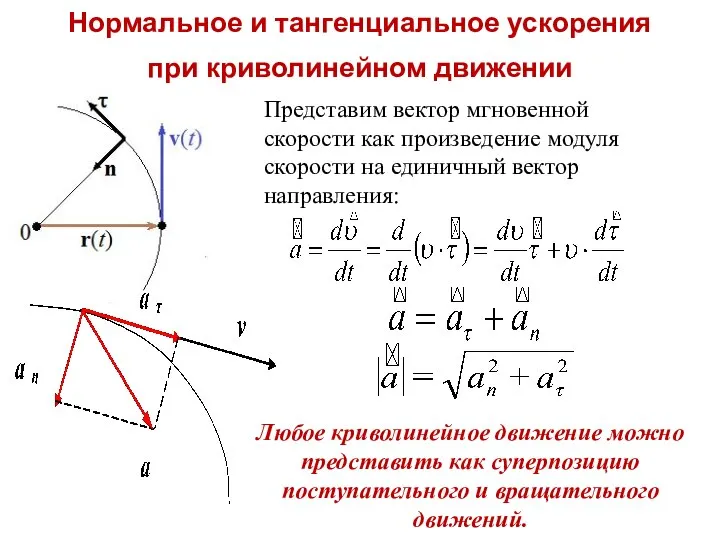
- 30. Нормальное и тангенциальное ускорения при криволинейном движении Представим вектор мгновенной скорости как произведение модуля скорости на
- 31. Угловая скорость - псевдовектор Период обращения Частота вращения Центростремительное ускорение
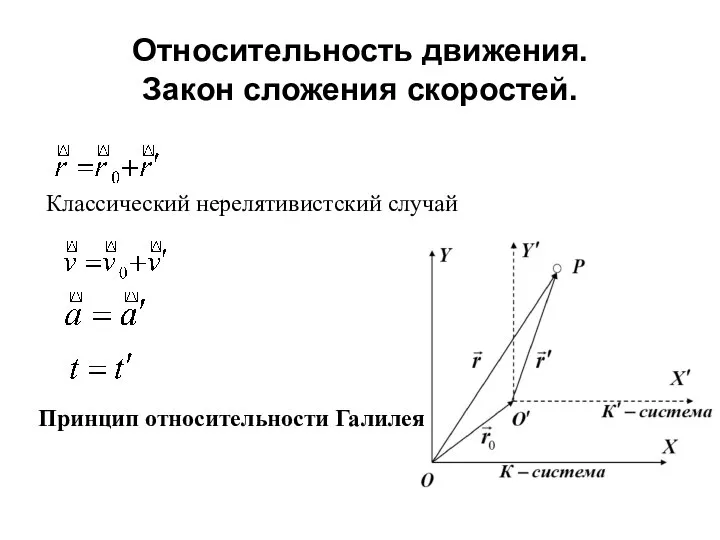
- 32. Относительность движения. Закон сложения скоростей. Классический нерелятивистский случай Принцип относительности Галилея
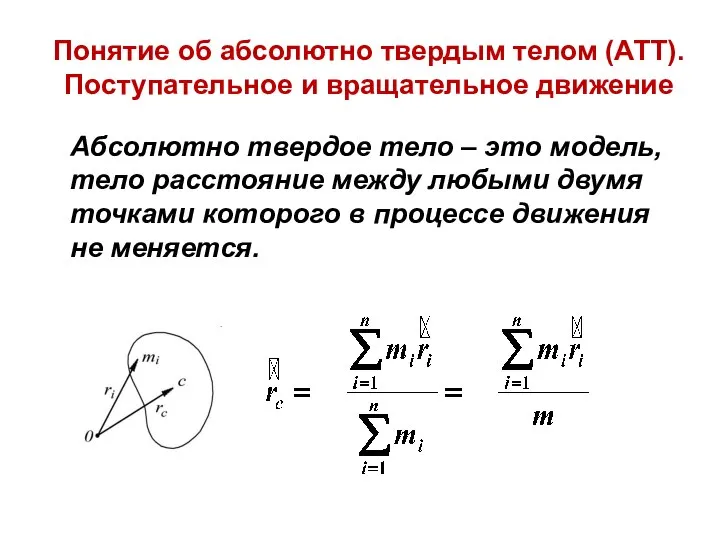
- 33. Понятие об абсолютно твердым телом (АТТ). Поступательное и вращательное движение Абсолютно твердое тело – это модель,
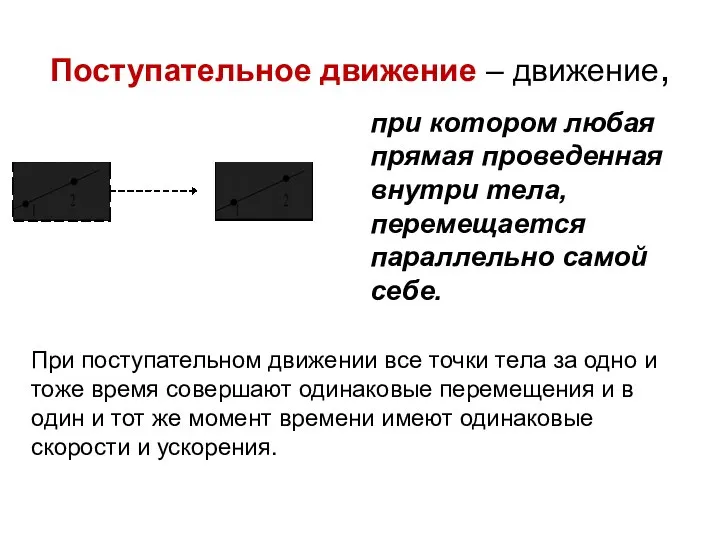
- 34. Поступательное движение – движение, при котором любая прямая проведенная внутри тела, перемещается параллельно самой себе. При
- 35. Абсолютно твердое тело Поступательное движение АТТ можно рассматривать, как движение материальной точки.
- 36. Кинематические уравнения. 1. Равномерное движение материальной точки вдоль оси x. x0 – начальная координата.
- 37. Кинематические уравнения. 2. Равнопеременное движение.
- 38. Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки тела движутся по окружностям,
- 39. В то же время радиус-вектор, соединяющий точки тела с осью вращения, за одно и то же
- 40. Вектор элементарного угла поворота. Вектор угловой скорости и углового перемещения. Связь линейных и угловых характеристик движения
- 41. Угловая скорость – векторная величина, равная первой производной угла поворота по времени Линейная скорость точки В
- 42. В векторном виде Векторное произведение по модулю равно Направление вектора v совпадает с направлением поступательного движения
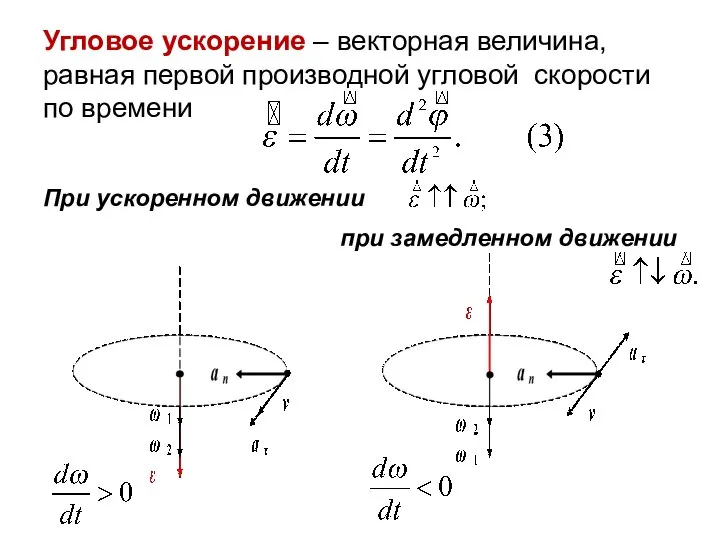
- 43. Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени При ускоренном движении при
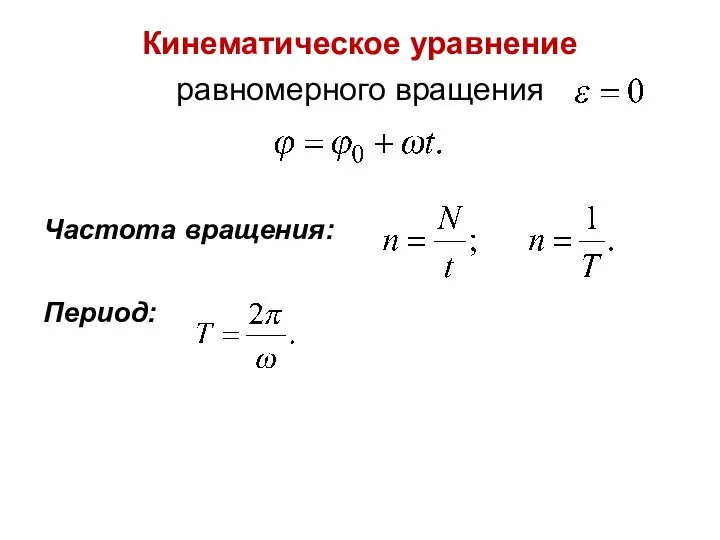
- 44. Кинематическое уравнение равномерного вращения Частота вращения: Период:
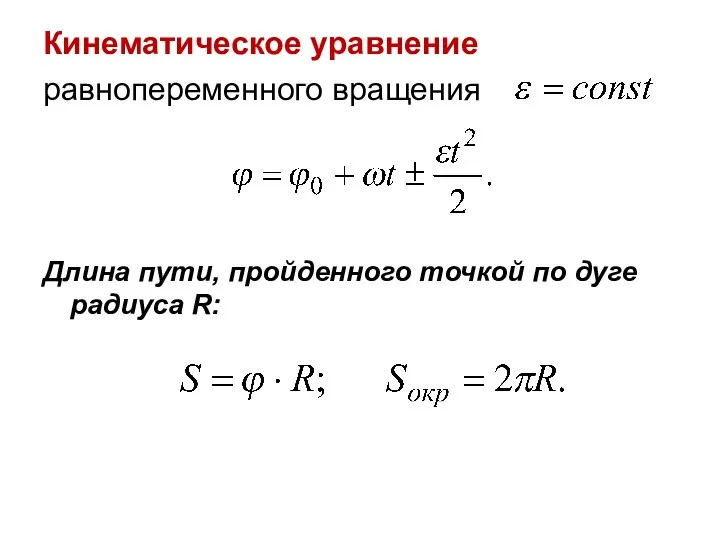
- 45. Кинематическое уравнение равнопеременного вращения Длина пути, пройденного точкой по дуге радиуса R:
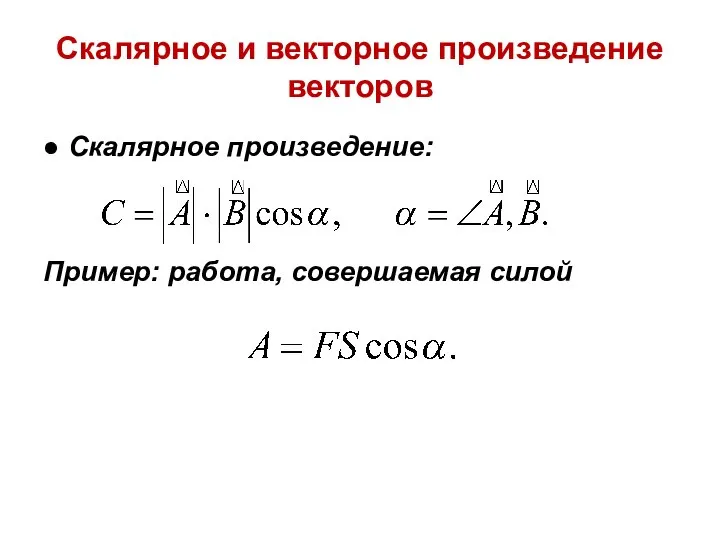
- 46. Скалярное и векторное произведение векторов ● Скалярное произведение: Пример: работа, совершаемая силой
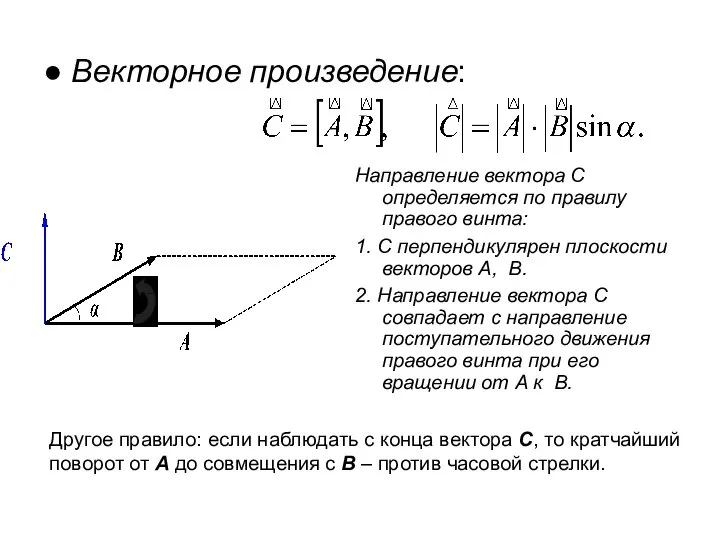
- 47. ● Векторное произведение: Направление вектора С определяется по правилу правого винта: 1. С перпендикулярен плоскости векторов
- 49. Скачать презентацию
Слайд 3Физика (от греч. φύσις (physis) - природа) – это наука, изучающая простейшие
Физика (от греч. φύσις (physis) - природа) – это наука, изучающая простейшие
Слайд 4Лекция 1
Механика:
Кинематика материальной точки
Кинематика (от греческого слова kinema – движение) – раздел
Лекция 1
Механика:
Кинематика материальной точки
Кинематика (от греческого слова kinema – движение) – раздел
Слайд 5 Модель – абстрактная система, являющаяся упрощенной копией реальной системы.
Материальная точка – тело,
Модель – абстрактная система, являющаяся упрощенной копией реальной системы.
Материальная точка – тело,
Слайд 6Положение материальной точки
определяется по отношению к какому-либо другому произвольно выбранному телу.
Всякое движение
Положение материальной точки
определяется по отношению к какому-либо другому произвольно выбранному телу.
Всякое движение
Слайд 7Приборы, служащие для определения положения движущегося тела – линейка и т.п.
Прибор, служащий
Приборы, служащие для определения положения движущегося тела – линейка и т.п.
Прибор, служащий
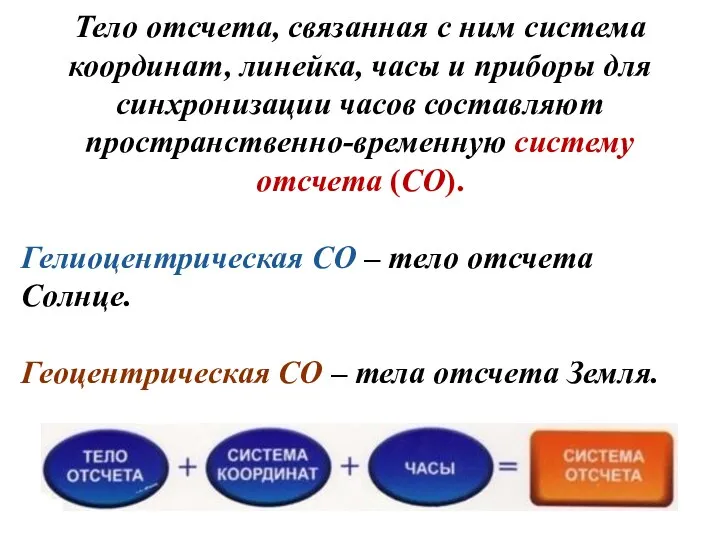
Слайд 8Тело отсчета, связанная с ним система координат, линейка, часы и приборы для
Тело отсчета, связанная с ним система координат, линейка, часы и приборы для
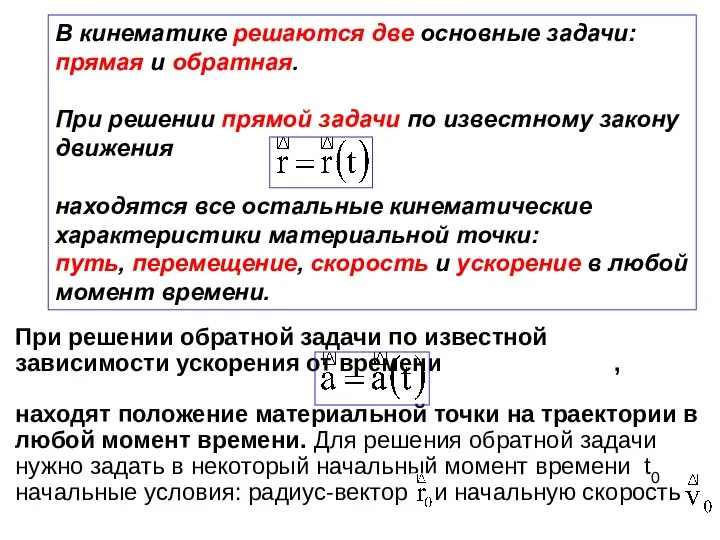
Слайд 9В кинематике решаются две основные задачи: прямая и обратная.
При решении прямой
В кинематике решаются две основные задачи: прямая и обратная.
При решении прямой
Слайд 10Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором
единичные вектора (орты)
x –
Положение материальной точки характеризуется тремя координатами (x,y,z) или радиус-вектором
единичные вектора (орты)
x –
Слайд 12 Движение материальной точки определяется системой скалярных уравнениями
или векторным уравнением
Эти уравнения называются
Движение материальной точки определяется системой скалярных уравнениями
или векторным уравнением
Эти уравнения называются
Слайд 13Траектория точки. Длина пути.
Вектор перемещения (перемещение).
Принцип независимости движения
Число независимых координат, полностью
Траектория точки. Длина пути.
Вектор перемещения (перемещение).
Принцип независимости движения
Число независимых координат, полностью
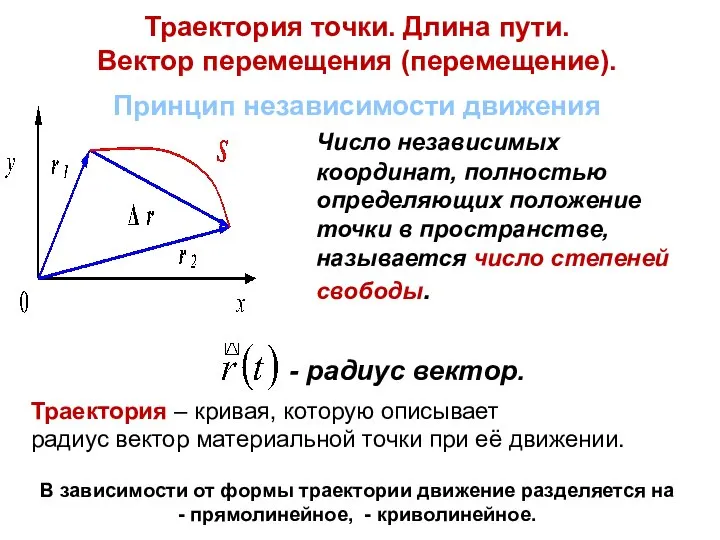
Слайд 14Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S.
-
Расстояние, отсчитанное вдоль траектории, (длина участка траектории) называется длиной пути S. -
Слайд 15При прямолинейном движении
Если движение происходит в течение бесконечно малого времени Δt → 0,
При прямолинейном движении
Если движение происходит в течение бесконечно малого времени Δt → 0,
Слайд 16Если материальная точка участвует в нескольких перемещениях, то результирующее перемещение равно векторной
Если материальная точка участвует в нескольких перемещениях, то результирующее перемещение равно векторной
Слайд 17Скорость движения
Для характеристики движения материальной точки
вводится понятие скорости – векторная величина.
Средний
Скорость движения
Для характеристики движения материальной точки
вводится понятие скорости – векторная величина.
Средний
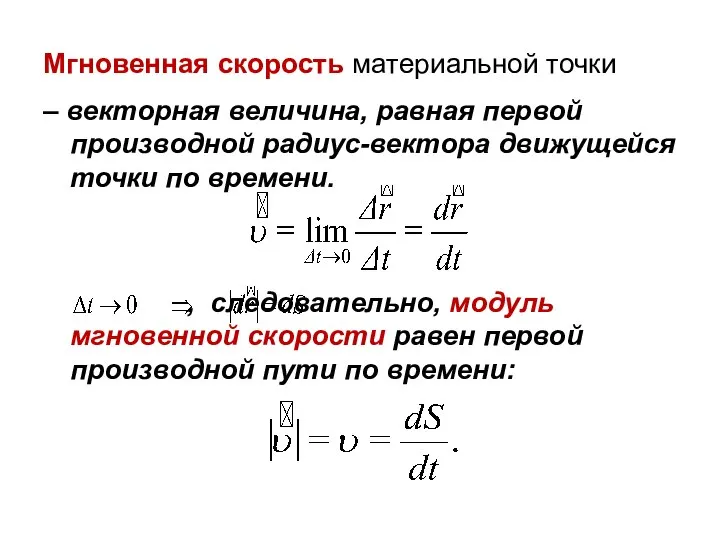
Слайд 18Мгновенная скорость материальной точки
– векторная величина, равная первой производной радиус-вектора движущейся
Мгновенная скорость материальной точки
– векторная величина, равная первой производной радиус-вектора движущейся
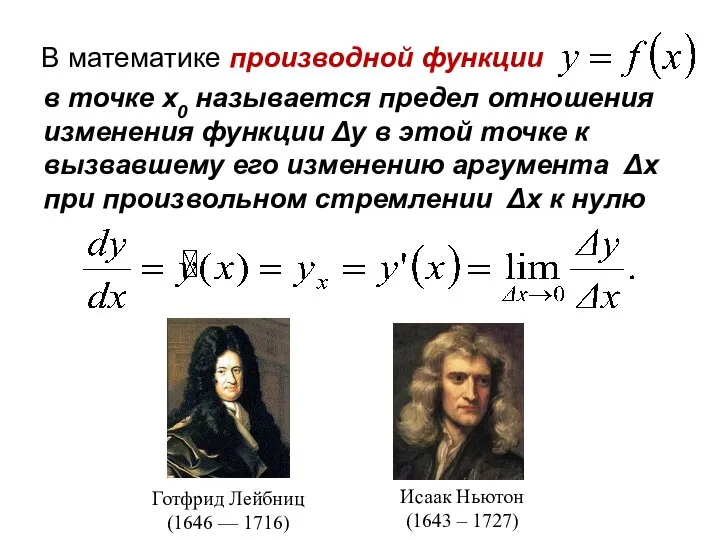
Слайд 19В математике производной функции
в точке x0 называется предел отношения изменения функции
В математике производной функции
в точке x0 называется предел отношения изменения функции
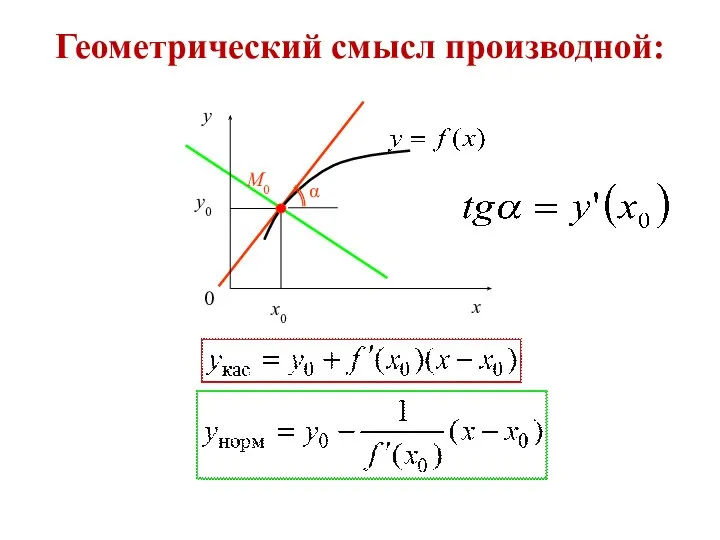
Слайд 20Геометрический смысл производной:
α
Геометрический смысл производной:
α
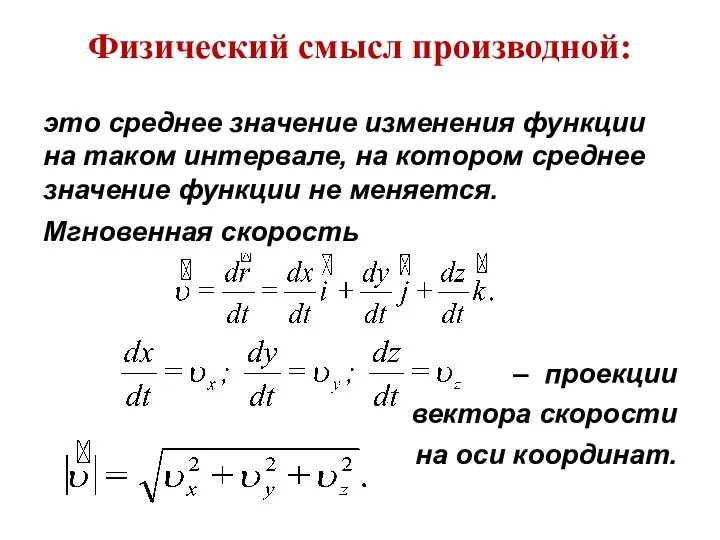
Слайд 21Физический смысл производной:
это среднее значение изменения функции на таком интервале, на котором
Физический смысл производной:
это среднее значение изменения функции на таком интервале, на котором
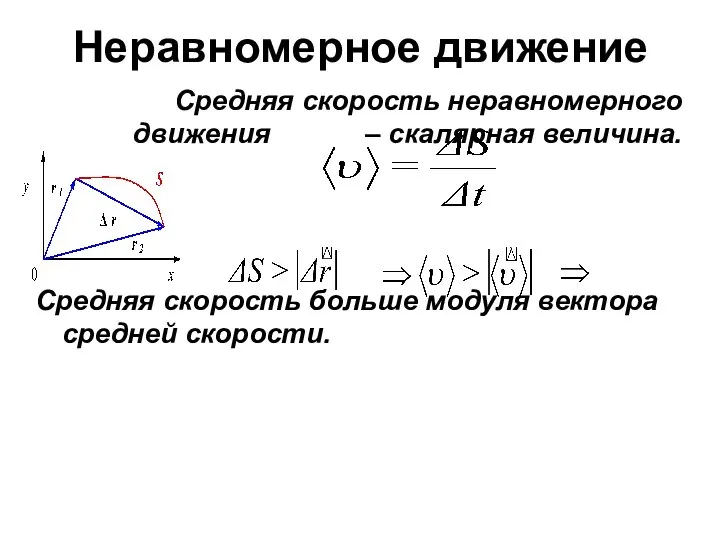
Слайд 22Неравномерное движение
Средняя скорость неравномерного движения – скалярная величина.
Средняя скорость больше модуля
Неравномерное движение
Средняя скорость неравномерного движения – скалярная величина.
Средняя скорость больше модуля
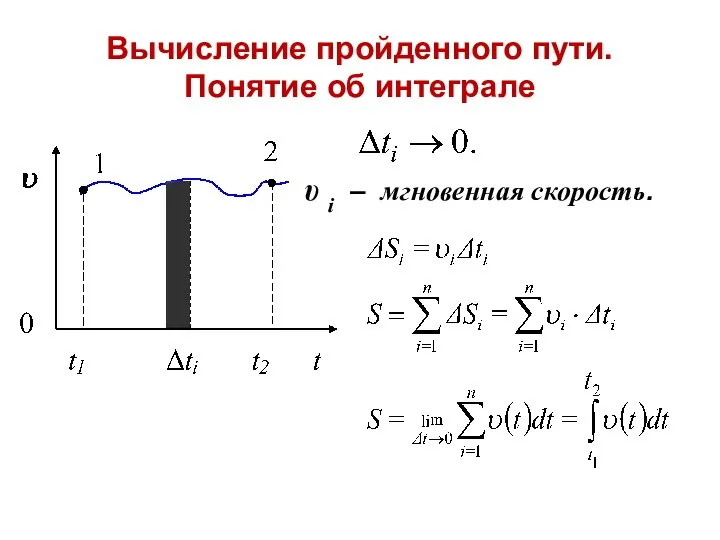
Слайд 23Вычисление пройденного пути.
Понятие об интеграле
υ i – мгновенная скорость.
Вычисление пройденного пути.
Понятие об интеграле
υ i – мгновенная скорость.
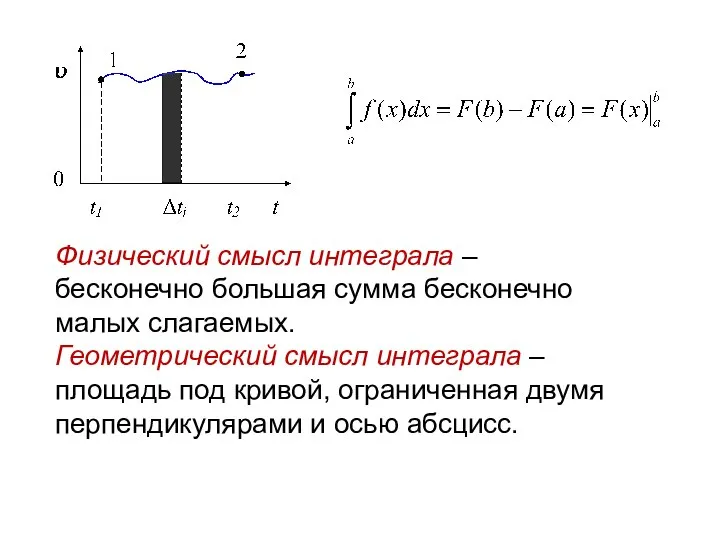
Слайд 24Физический смысл интеграла –
бесконечно большая сумма бесконечно
малых слагаемых.
Геометрический смысл интеграла
Физический смысл интеграла –
бесконечно большая сумма бесконечно
малых слагаемых.
Геометрический смысл интеграла
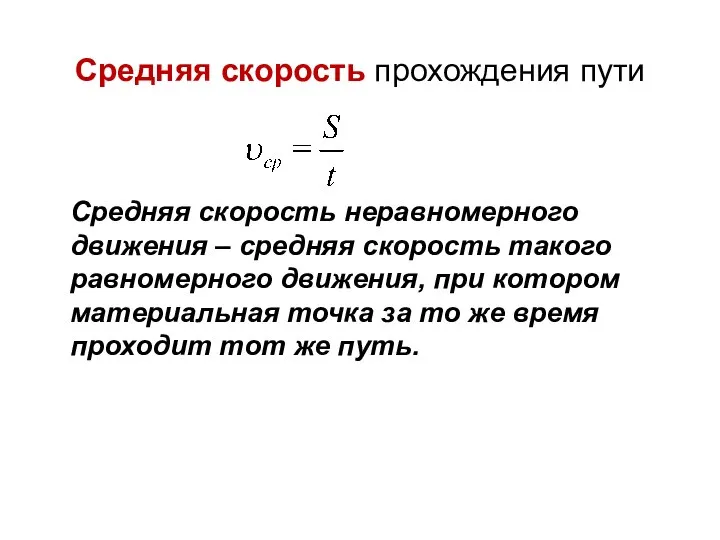
Слайд 25Средняя скорость прохождения пути
Средняя скорость неравномерного движения – средняя скорость такого
Средняя скорость прохождения пути
Средняя скорость неравномерного движения – средняя скорость такого
Слайд 26Ускорение
Мгновенное ускорение
Ускорение
Мгновенное ускорение
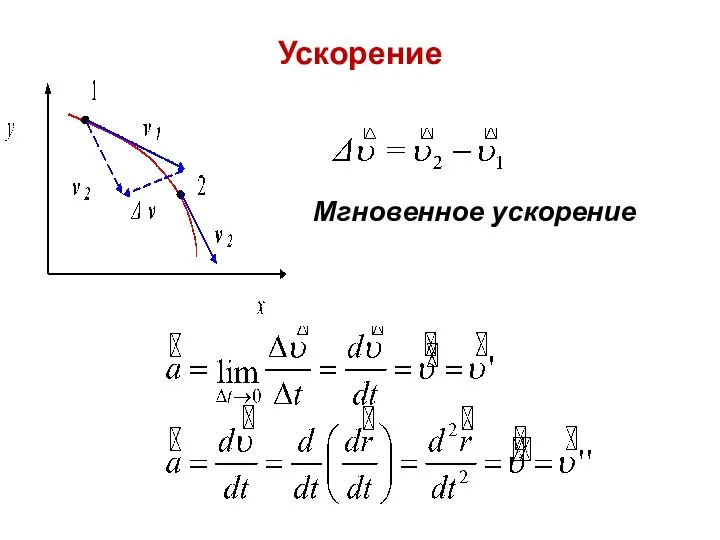
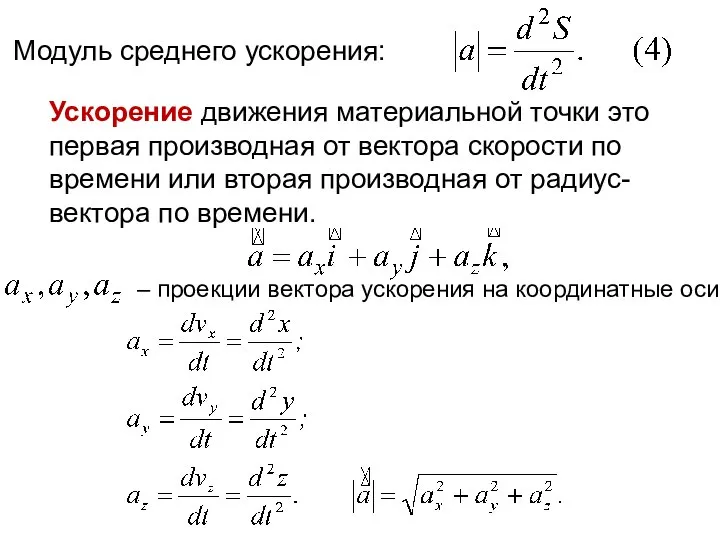
Слайд 27Модуль среднего ускорения:
Ускорение движения материальной точки это первая производная от вектора скорости
Модуль среднего ускорения:
Ускорение движения материальной точки это первая производная от вектора скорости
Слайд 28Понятие о кривизне
Δφ - угол между касательными в точках, отстоящих друг от
Понятие о кривизне
Δφ - угол между касательными в точках, отстоящих друг от
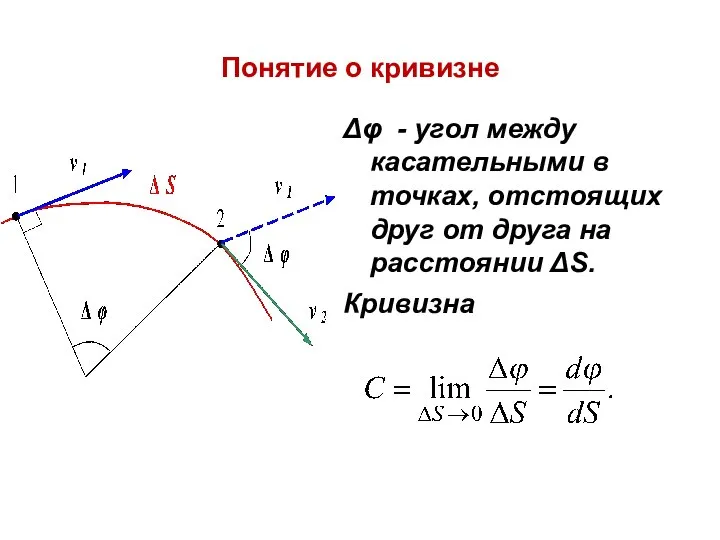
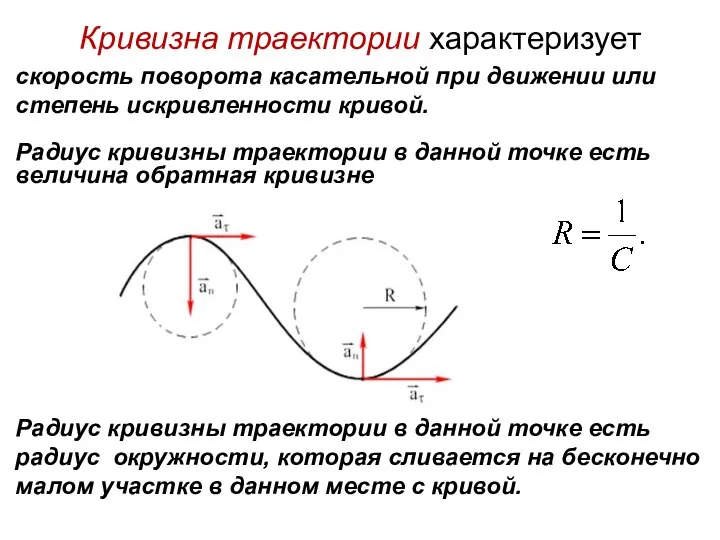
Слайд 29Кривизна траектории характеризует
скорость поворота касательной при движении или степень искривленности кривой.
Радиус
Кривизна траектории характеризует
скорость поворота касательной при движении или степень искривленности кривой.
Радиус
Слайд 30Нормальное и тангенциальное ускорения
при криволинейном движении
Представим вектор мгновенной скорости как произведение
Нормальное и тангенциальное ускорения
при криволинейном движении
Представим вектор мгновенной скорости как произведение
Слайд 31Угловая скорость - псевдовектор
Период обращения
Частота вращения
Центростремительное ускорение
Угловая скорость - псевдовектор
Период обращения
Частота вращения
Центростремительное ускорение

Слайд 32Относительность движения.
Закон сложения скоростей.
Классический нерелятивистский случай
Принцип относительности Галилея
Относительность движения.
Закон сложения скоростей.
Классический нерелятивистский случай
Принцип относительности Галилея
Слайд 33Понятие об абсолютно твердым телом (АТТ).
Поступательное и вращательное движение
Абсолютно твердое тело –
Понятие об абсолютно твердым телом (АТТ).
Поступательное и вращательное движение
Абсолютно твердое тело –
Слайд 34Поступательное движение – движение,
при котором любая прямая проведенная внутри тела, перемещается
Поступательное движение – движение,
при котором любая прямая проведенная внутри тела, перемещается
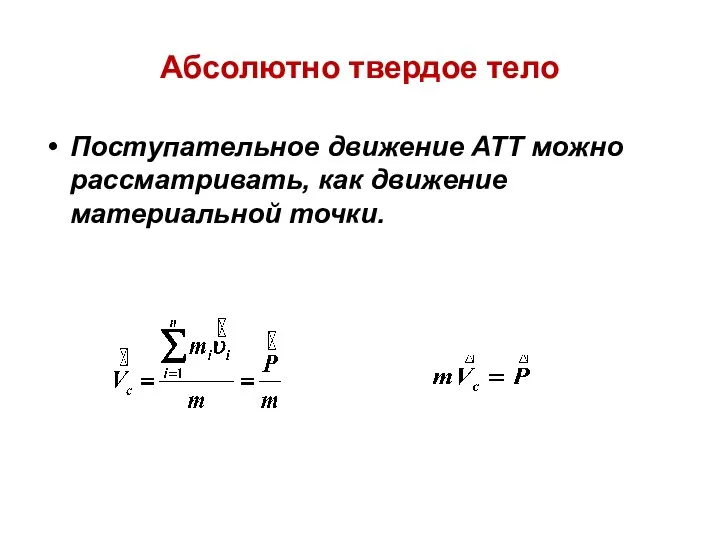
Слайд 35Абсолютно твердое тело
Поступательное движение АТТ можно рассматривать, как движение материальной точки.
Абсолютно твердое тело
Поступательное движение АТТ можно рассматривать, как движение материальной точки.
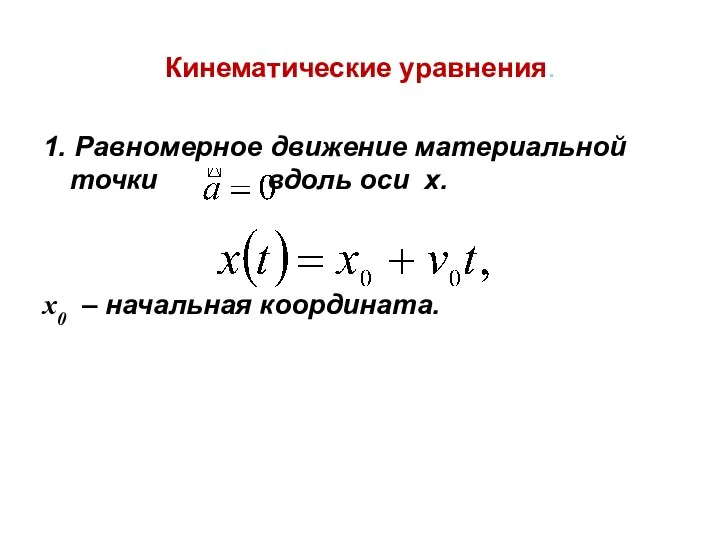
Слайд 36Кинематические уравнения.
1. Равномерное движение материальной точки вдоль оси x.
x0 – начальная координата.
Кинематические уравнения.
1. Равномерное движение материальной точки вдоль оси x.
x0 – начальная координата.
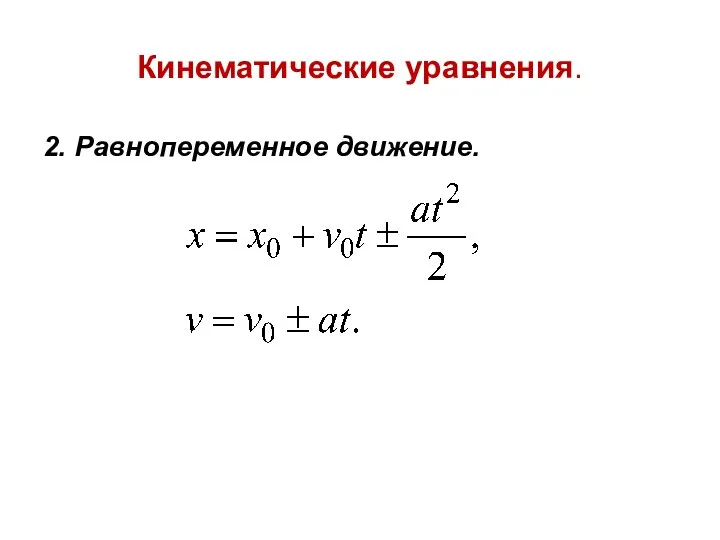
Слайд 37Кинематические уравнения.
2. Равнопеременное движение.
Кинематические уравнения.
2. Равнопеременное движение.
Слайд 38Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки
Вращательное движение АТТ относительно неподвижной оси – движение, при котором все точки
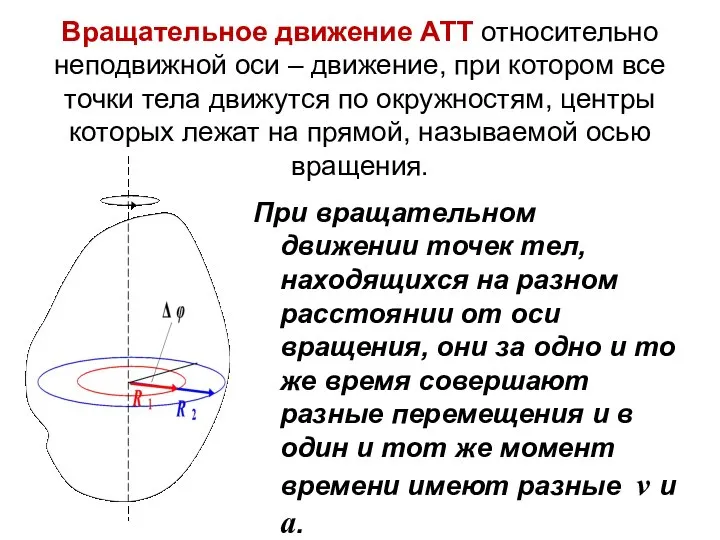
Слайд 39В то же время радиус-вектор, соединяющий точки тела с осью вращения, за
В то же время радиус-вектор, соединяющий точки тела с осью вращения, за
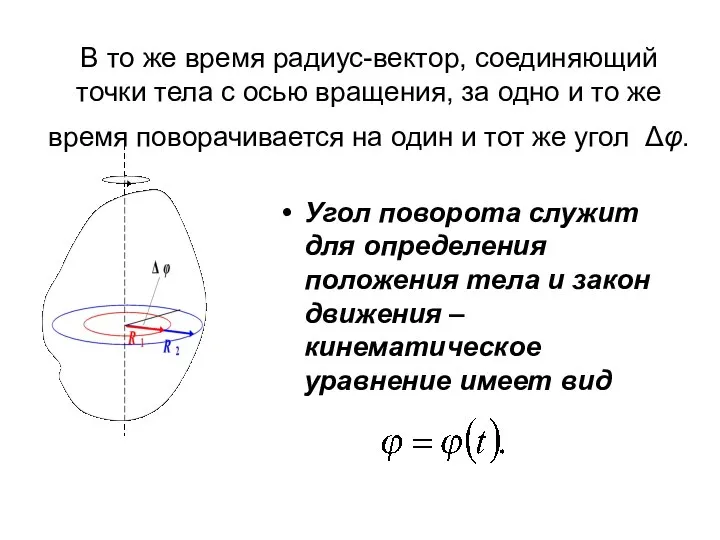
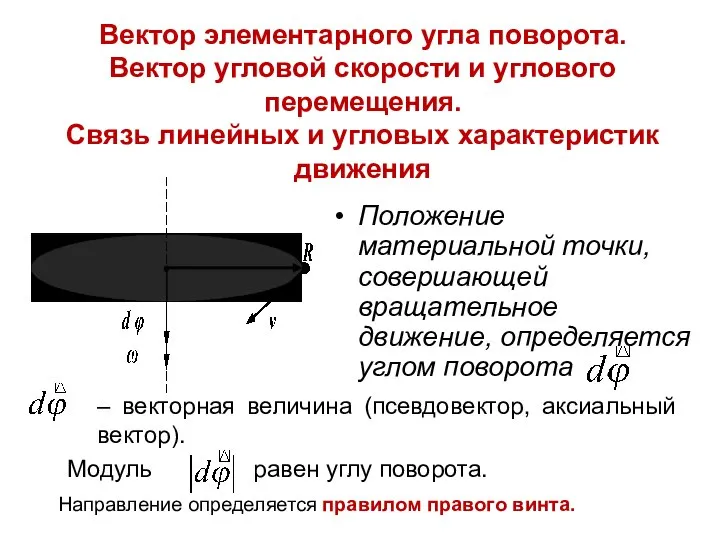
Слайд 40Вектор элементарного угла поворота.
Вектор угловой скорости и углового перемещения.
Связь линейных и угловых
Вектор элементарного угла поворота. Вектор угловой скорости и углового перемещения. Связь линейных и угловых
Слайд 41Угловая скорость
– векторная величина, равная первой производной угла поворота по времени
Линейная
Угловая скорость
– векторная величина, равная первой производной угла поворота по времени
Линейная
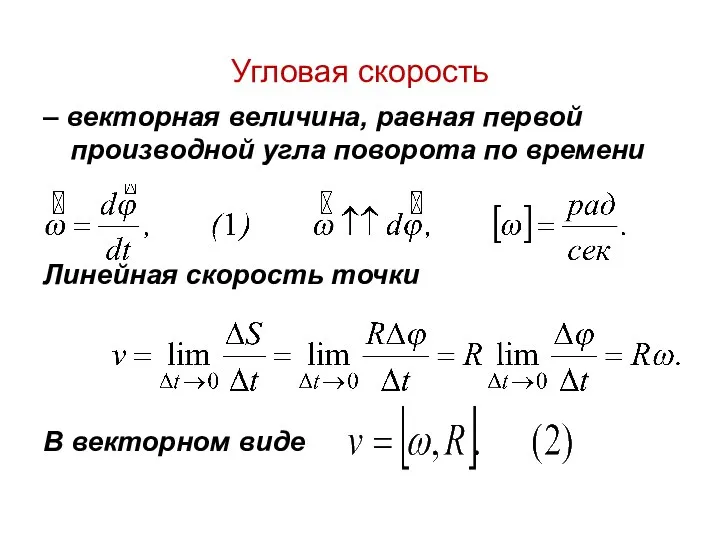
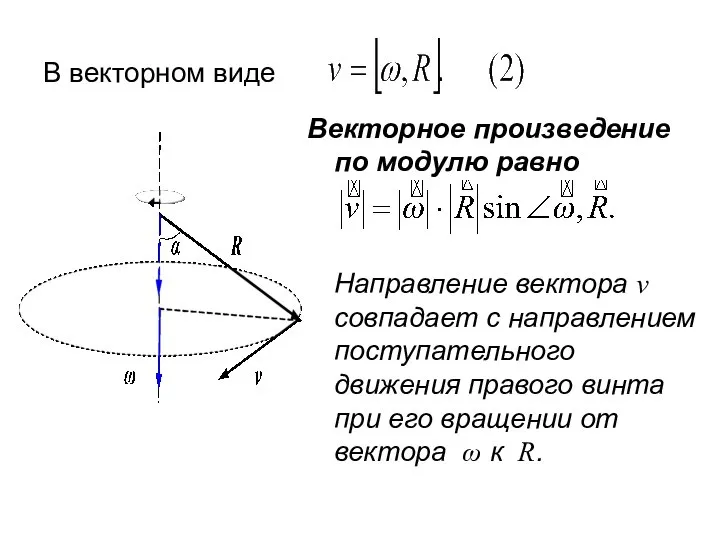
Слайд 42В векторном виде
Векторное произведение по модулю равно
Направление вектора v совпадает с
В векторном виде
Векторное произведение по модулю равно
Направление вектора v совпадает с
Слайд 43Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени
При
Угловое ускорение – векторная величина, равная первой производной угловой скорости по времени
При
Слайд 44Кинематическое уравнение равномерного вращения
Частота вращения:
Период:
Кинематическое уравнение равномерного вращения
Частота вращения:
Период:
Слайд 45Кинематическое уравнение равнопеременного вращения
Длина пути, пройденного точкой по дуге радиуса R:
Кинематическое уравнение равнопеременного вращения
Длина пути, пройденного точкой по дуге радиуса R:
Слайд 46Скалярное и векторное произведение векторов
● Скалярное произведение:
Пример: работа, совершаемая силой
Скалярное и векторное произведение векторов
● Скалярное произведение:
Пример: работа, совершаемая силой
Слайд 47● Векторное произведение:
Направление вектора С определяется по правилу правого винта:
1. С
● Векторное произведение:
Направление вектора С определяется по правилу правого винта:
1. С
 Презентация на тему Свободное падение тел
Презентация на тему Свободное падение тел  Двигатель внутреннего сгорания
Двигатель внутреннего сгорания КР
КР Плотность. Плотность мрамора
Плотность. Плотность мрамора Особенности частотного планирования сотовых сетей цифровой радиосвязи
Особенности частотного планирования сотовых сетей цифровой радиосвязи Механическая работа
Механическая работа Lektsia1_Magnitnoe_pole_i_td
Lektsia1_Magnitnoe_pole_i_td Презентация на тему Паровые машины
Презентация на тему Паровые машины  Трение - полезное или вредное явление?
Трение - полезное или вредное явление? Законы Кирхгофа, расчет электрических цепей
Законы Кирхгофа, расчет электрических цепей Влияние диэлектрического окружения на оптические свойства наноструктур
Влияние диэлектрического окружения на оптические свойства наноструктур Двигатели технический систем
Двигатели технический систем Энергия топлива
Энергия топлива Відновлення працездатності засобами фізичної рекреації
Відновлення працездатності засобами фізичної рекреації Проводники с током в магнитном поле. Лекция 7
Проводники с током в магнитном поле. Лекция 7 Подбор стартера на автомобиль ВАЗ-2170
Подбор стартера на автомобиль ВАЗ-2170 Презентация на тему Основы СТО
Презентация на тему Основы СТО  Найдем правильную дорогу
Найдем правильную дорогу Работа совершаемая при термодинамических процессах. Количество теплоты. Теплоемкость
Работа совершаемая при термодинамических процессах. Количество теплоты. Теплоемкость Сила тока. Измерение силы тока. Амперметр. Урок-путешествие в город электрического тока
Сила тока. Измерение силы тока. Амперметр. Урок-путешествие в город электрического тока Законы Ньютона
Законы Ньютона Электрическое освещение бытовых и промышленных объектов
Электрическое освещение бытовых и промышленных объектов Сборка, регулировка и испытание системы питания карбюраторных двигателей
Сборка, регулировка и испытание системы питания карбюраторных двигателей Атом. Левкипп. V в. до н.э
Атом. Левкипп. V в. до н.э Электрический ток в газах
Электрический ток в газах Презентация на тему Движение по окружности
Презентация на тему Движение по окружности  Мембранные процессы
Мембранные процессы Техническая учеба по теме: Продольная дифференциальная защита линий
Техническая учеба по теме: Продольная дифференциальная защита линий