- Классификация связей в динамике

Содержание
- 2. Рассмотреть классификацию связей в динамике, познакомиться с принципом возможных перемещений и научиться с помощью этого принципа
- 3. В статике: Связи - то, что не даёт перемещаться Действие связей описывается реакциями. В аналитической механике:
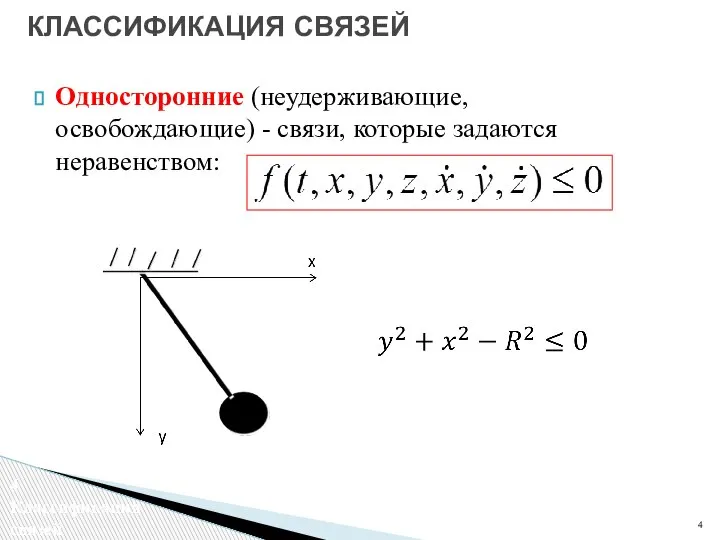
- 4. Односторонние (неудерживающие, освобождающие) - связи, которые задаются неравенством: КЛАССИФИКАЦИЯ СВЯЗЕЙ Классификация связей
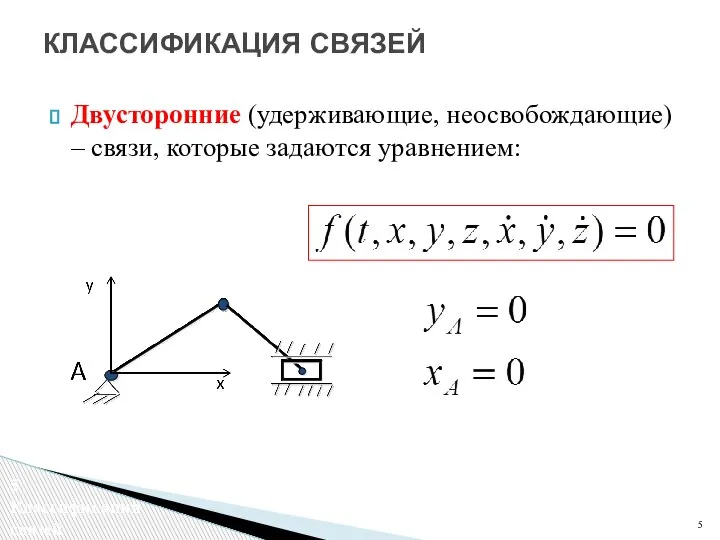
- 5. Двусторонние (удерживающие, неосвобождающие) – связи, которые задаются уравнением: КЛАССИФИКАЦИЯ СВЯЗЕЙ Классификация связей
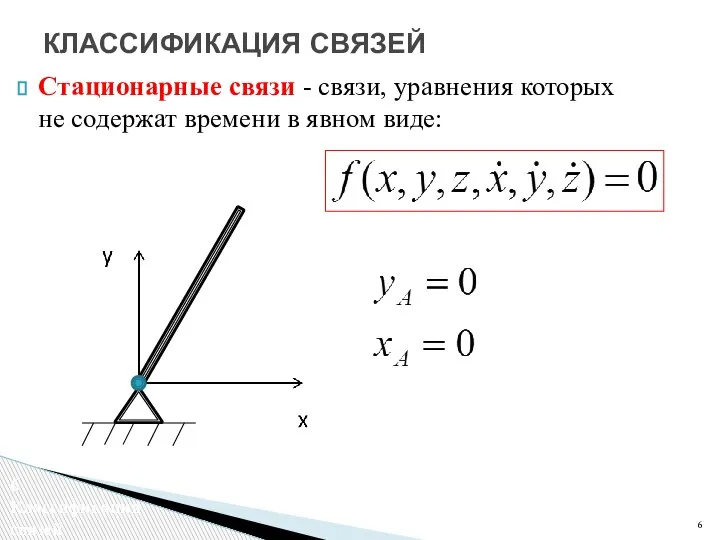
- 6. Стационарные связи - связи, уравнения которых не содержат времени в явном виде: КЛАССИФИКАЦИЯ СВЯЗЕЙ Классификация связей
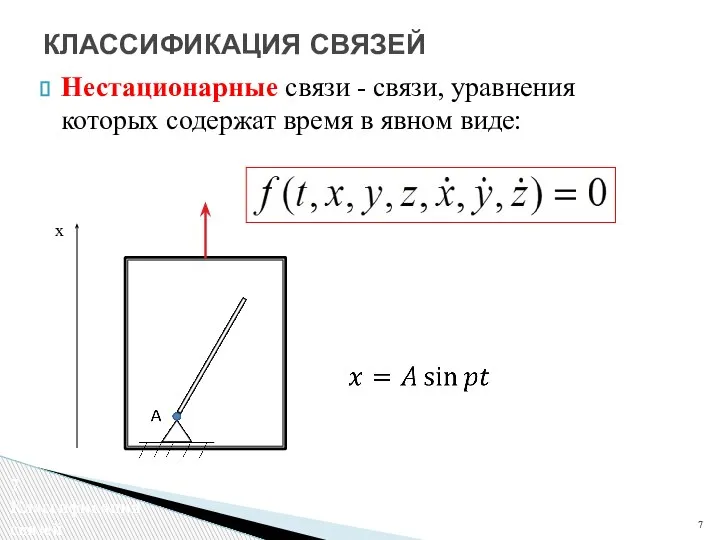
- 7. Нестационарные связи - связи, уравнения которых содержат время в явном виде: КЛАССИФИКАЦИЯ СВЯЗЕЙ x Классификация связей
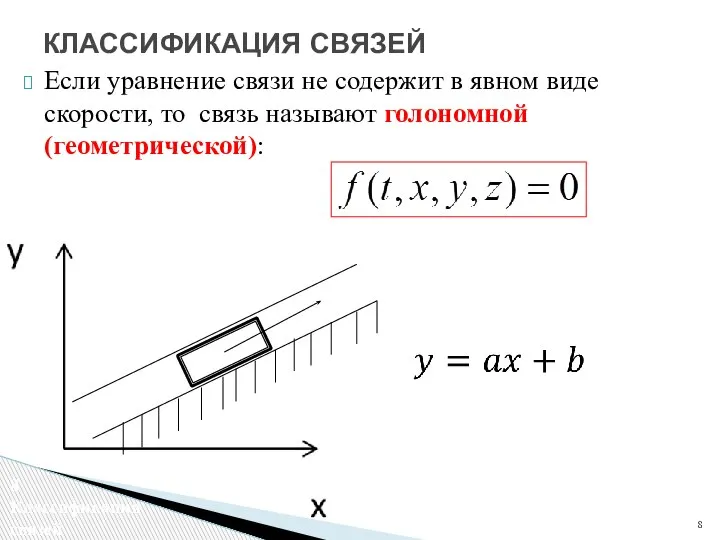
- 8. Если уравнение связи не содержит в явном виде скорости, то связь называют голономной (геометрической): КЛАССИФИКАЦИЯ СВЯЗЕЙ
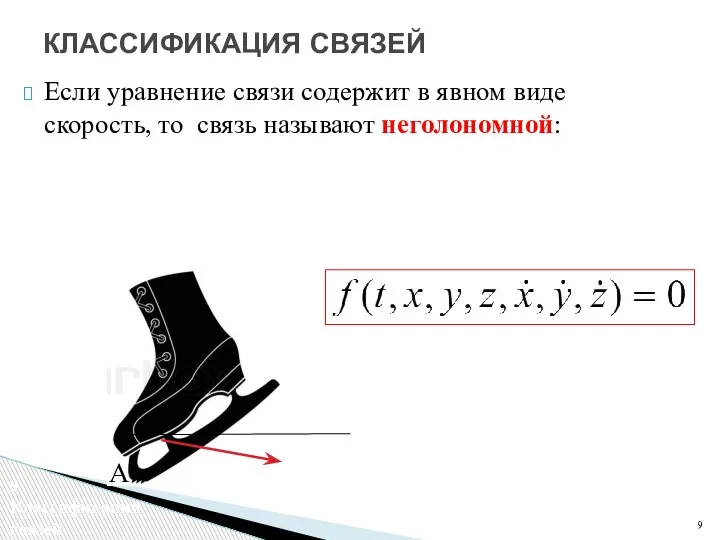
- 9. Если уравнение связи содержит в явном виде скорость, то связь называют неголономной: КЛАССИФИКАЦИЯ СВЯЗЕЙ A Классификация
- 10. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ Принцип возможных перемещений
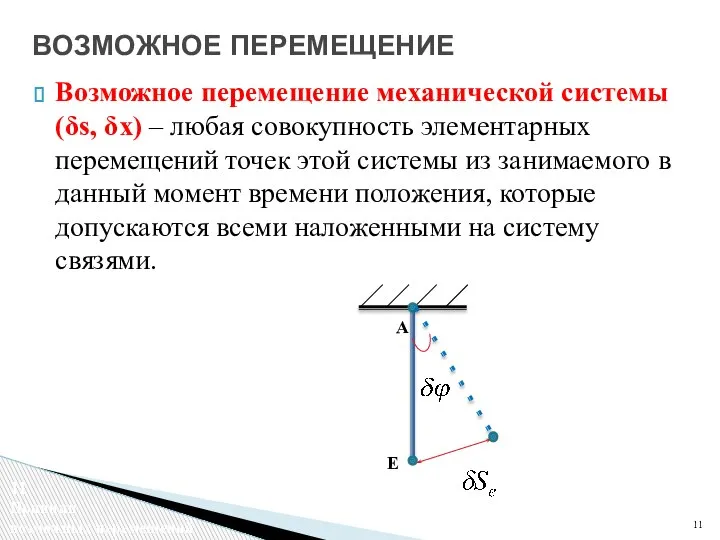
- 11. Возможное перемещение механической системы (δs, δx) – любая совокупность элементарных перемещений точек этой системы из занимаемого
- 12. Возможные перемещения характеризуются тем, что они: могут и не происходить (они воображаемые); бесконечно малые; происходят с
- 13. Возможная работа – это элементарная работа, которую действующая на материальную точку сила могла бы совершить на
- 14. Устанавливает общее условие равновесия механической системы в целом При идеальных связях позволяет исключить из рассмотрения все
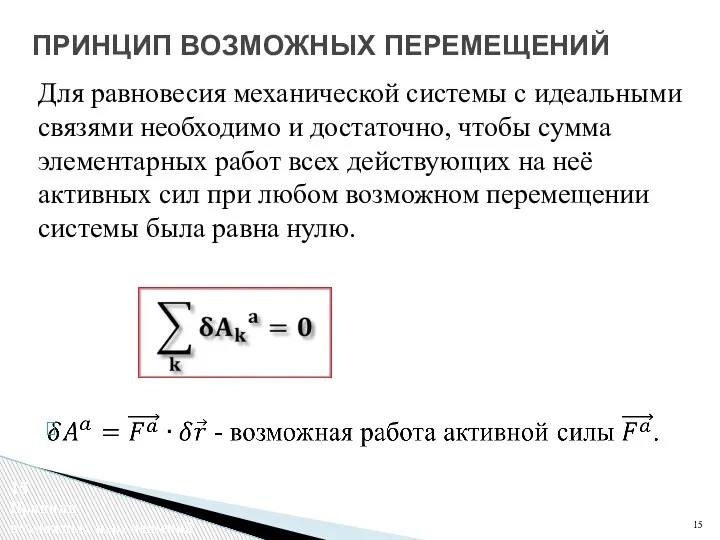
- 15. ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных
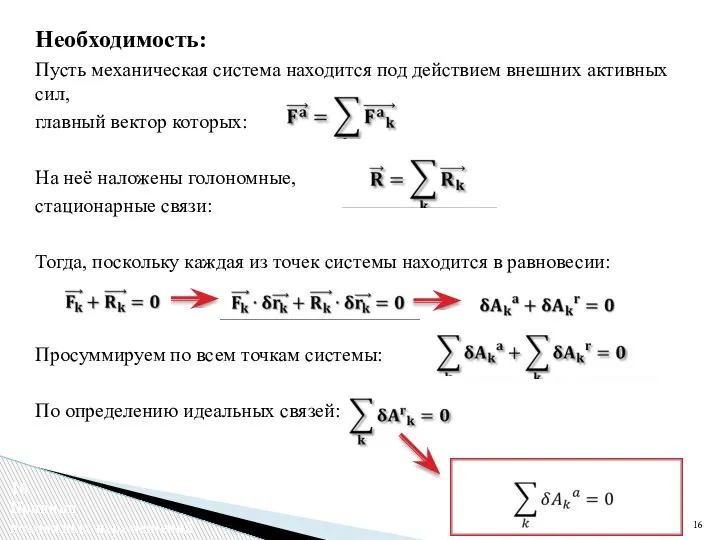
- 16. Необходимость: Пусть механическая система находится под действием внешних активных сил, главный вектор которых: На неё наложены
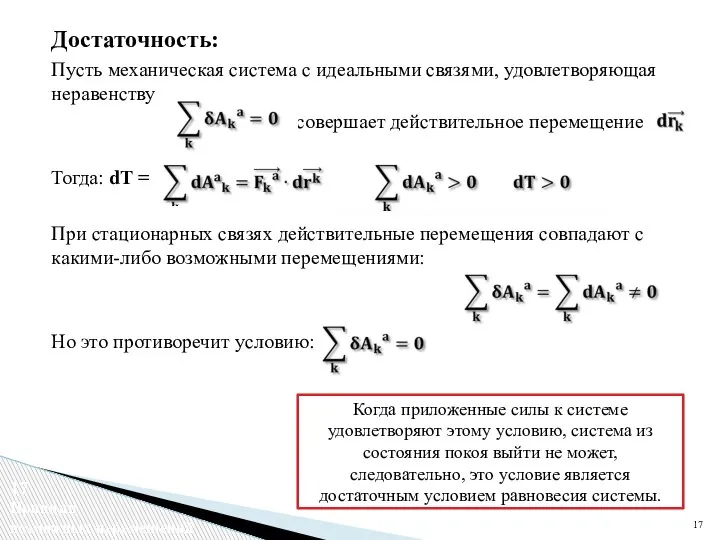
- 17. Достаточность: Пусть механическая система с идеальными связями, удовлетворяющая неравенству совершает действительное перемещение Тогда: dT = При
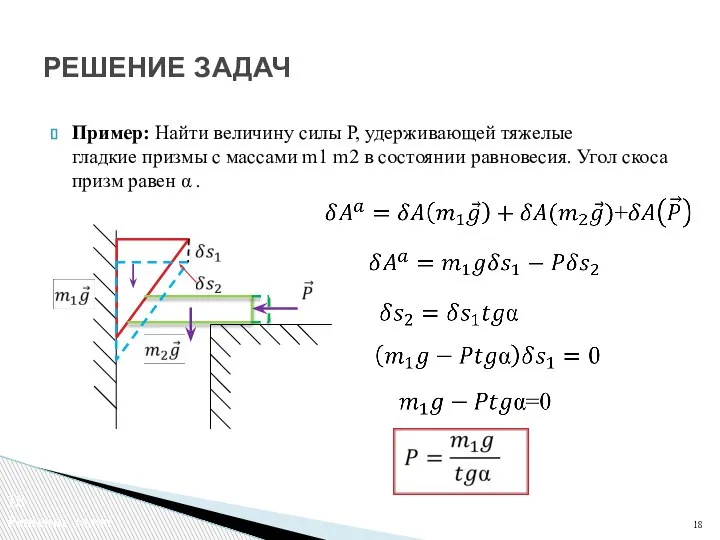
- 18. Пример: Найти величину силы Р, удерживающей тяжелые гладкие призмы с массами m1 m2 в состоянии равновесия.
- 19. Принцип возможных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем – находить неизвестные активные
- 21. Скачать презентацию
Слайд 2Рассмотреть классификацию связей в динамике, познакомиться с принципом возможных перемещений и научиться
Рассмотреть классификацию связей в динамике, познакомиться с принципом возможных перемещений и научиться
Слайд 3В статике:
Связи - то, что не даёт перемещаться
Действие связей описывается реакциями.
В аналитической
В статике:
Связи - то, что не даёт перемещаться
Действие связей описывается реакциями.
В аналитической
Слайд 4Односторонние (неудерживающие, освобождающие) - связи, которые задаются неравенством:
КЛАССИФИКАЦИЯ СВЯЗЕЙ
Классификация связей
Односторонние (неудерживающие, освобождающие) - связи, которые задаются неравенством:
КЛАССИФИКАЦИЯ СВЯЗЕЙ
Классификация связей
Слайд 5Двусторонние (удерживающие, неосвобождающие) – связи, которые задаются уравнением:
КЛАССИФИКАЦИЯ СВЯЗЕЙ
Классификация связей
Двусторонние (удерживающие, неосвобождающие) – связи, которые задаются уравнением:
КЛАССИФИКАЦИЯ СВЯЗЕЙ
Классификация связей
Слайд 6Стационарные связи - связи, уравнения которых не содержат времени в явном виде:
Стационарные связи - связи, уравнения которых не содержат времени в явном виде:
Слайд 7Нестационарные связи - связи, уравнения которых содержат время в явном виде:
КЛАССИФИКАЦИЯ
Нестационарные связи - связи, уравнения которых содержат время в явном виде:
КЛАССИФИКАЦИЯ
Слайд 8Если уравнение связи не содержит в явном виде скорости, то связь называют
Если уравнение связи не содержит в явном виде скорости, то связь называют
Слайд 9Если уравнение связи содержит в явном виде скорость, то связь называют неголономной:
Если уравнение связи содержит в явном виде скорость, то связь называют неголономной:
Слайд 10ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Принцип
возможных перемещений
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Принцип
возможных перемещений
Слайд 11Возможное перемещение механической системы (δs, δx) – любая совокупность элементарных перемещений точек
Возможное перемещение механической системы (δs, δx) – любая совокупность элементарных перемещений точек
Слайд 12Возможные перемещения характеризуются тем, что они:
могут и не происходить (они воображаемые);
бесконечно малые;
происходят
Возможные перемещения характеризуются тем, что они:
могут и не происходить (они воображаемые);
бесконечно малые;
происходят
Слайд 13Возможная работа – это элементарная работа, которую действующая на материальную точку сила
Возможная работа – это элементарная работа, которую действующая на материальную точку сила
Слайд 14Устанавливает общее условие равновесия механической системы в целом
При идеальных связях позволяет
Устанавливает общее условие равновесия механической системы в целом
При идеальных связях позволяет
Слайд 15
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Для равновесия механической системы с идеальными связями необходимо и достаточно,
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ
Для равновесия механической системы с идеальными связями необходимо и достаточно,
Слайд 16Необходимость:
Пусть механическая система находится под действием внешних активных сил,
главный вектор которых:
На
Необходимость:
Пусть механическая система находится под действием внешних активных сил,
главный вектор которых:
На
Слайд 17Достаточность:
Пусть механическая система с идеальными связями, удовлетворяющая неравенству
совершает действительное
Достаточность:
Пусть механическая система с идеальными связями, удовлетворяющая неравенству
совершает действительное
Слайд 18Пример: Найти величину силы Р, удерживающей тяжелые гладкие призмы с массами m1 m2 в состоянии равновесия.
Пример: Найти величину силы Р, удерживающей тяжелые гладкие призмы с массами m1 m2 в состоянии равновесия.
Слайд 19Принцип возможных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем
Принцип возможных перемещений позволяет решать самые разнообразные задачи на равновесие механических систем
 Презентация_Кинематика криволинейное движение (2)
Презентация_Кинематика криволинейное движение (2) Основы физической органической химии. Сигма-ро анализ
Основы физической органической химии. Сигма-ро анализ Топливный бак. Назначение, устройство
Топливный бак. Назначение, устройство Бірігіп жұмыс жасайтын квадрокоптерлер динамикасы мен басқарылуы
Бірігіп жұмыс жасайтын квадрокоптерлер динамикасы мен басқарылуы Спрощення складних 1Н-ЯМР-спектрів. Гомоядерний декаплінг
Спрощення складних 1Н-ЯМР-спектрів. Гомоядерний декаплінг Опыты с магнитом
Опыты с магнитом Количественный хроматографический анализ
Количественный хроматографический анализ Презентация по физике "Путешествие в город Электризацию" -
Презентация по физике "Путешествие в город Электризацию" -  Теоретические основы электротехники. Теория электромагнитного поля. Лекция 8
Теоретические основы электротехники. Теория электромагнитного поля. Лекция 8 Фотоэффект. Самостоятельная работа
Фотоэффект. Самостоятельная работа Общий порядок построения эпюр Qx и Мх
Общий порядок построения эпюр Qx и Мх Состояние мотивационной сферы дошкольника с НОДА (ДЦП)
Состояние мотивационной сферы дошкольника с НОДА (ДЦП) Ультрафиолетовое излучение
Ультрафиолетовое излучение Назначение и типы. Общее устройство конструкции и принцип работы. Урок № 126
Назначение и типы. Общее устройство конструкции и принцип работы. Урок № 126 Опыты Резерфорда. Ядерная модель атома
Опыты Резерфорда. Ядерная модель атома Курс физики. Введение
Курс физики. Введение Лекция 1 Ядерно-топливный цикл
Лекция 1 Ядерно-топливный цикл Дефлектор
Дефлектор Законы физики в танцевальных движениях
Законы физики в танцевальных движениях Скорость
Скорость Механические волны
Механические волны Элементарные частицы
Элементарные частицы Структура конвективного течения вблизи источников тепла различной геометрической формы
Структура конвективного течения вблизи источников тепла различной геометрической формы Физические величины и единицы измерения. Лабораторная работа 1
Физические величины и единицы измерения. Лабораторная работа 1 Конструкционные материалы. Классификация. Свойства
Конструкционные материалы. Классификация. Свойства Искусственный интеллект. Сценарий №1
Искусственный интеллект. Сценарий №1 Действие нескольких сил
Действие нескольких сил Детали машин. Механические передачи машин. Параметры передач
Детали машин. Механические передачи машин. Параметры передач