- Жазыќ механизмдерді кинематикалыќ зерттеу. (Дјріс 3)

Содержание
- 2. 1. V –кластық айналмалы кинематикалық жұп А 1 2 1 А1 А2 2 А1 және А2
- 3. 2. V кластық ілгерлемелі кинематикалық жұп В В3 В4 3 4 В3, В4 – 3 және
- 4. 3. Бір мүшенің күрделі қозғалысы А В ωАВ В нүктесінің күрделі қозғалыстарының векторлық теңдеулері:
- 5. В 4. Ілгерлемелі жұпта тасымалды қозғалыс айналмалы болса А3 нүктесінің кинематикалық параметрлері 2 мүшемен бірге (тасымалды)
- 6. 5 d4.5 - 5 3 2 1 c 4 (CB) ║ ║ (Ox) a d3 в
- 7. 5 d4.5 3 2 1 c 4 (CB) ║ ║ (Ox) a d3 в s2 s3
- 8. - 3 - 2 р полюсынан 1 сызығын (ОА) перпендикуляр жүргізіп, (ра) кесіндісін саламыз. Онда, жылдамдықтардың
- 9. 7. d3 арқылы ВС-ға 4 сызығын жүргіземіз. 8. Полюс р арқылы (Ох) 5 сызығын жүргізіп және
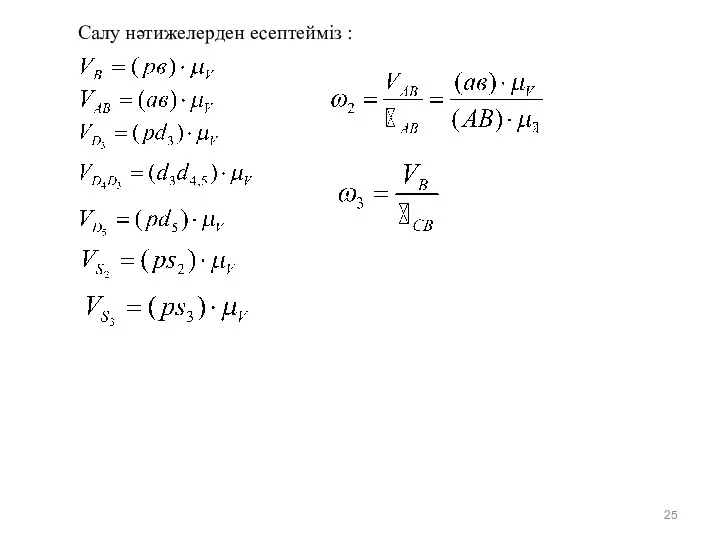
- 10. Салу нәтижелерден есептейміз :
- 12. Скачать презентацию
Слайд 21. V –кластық айналмалы кинематикалық жұп
А
1
2
1
А1
А2
2
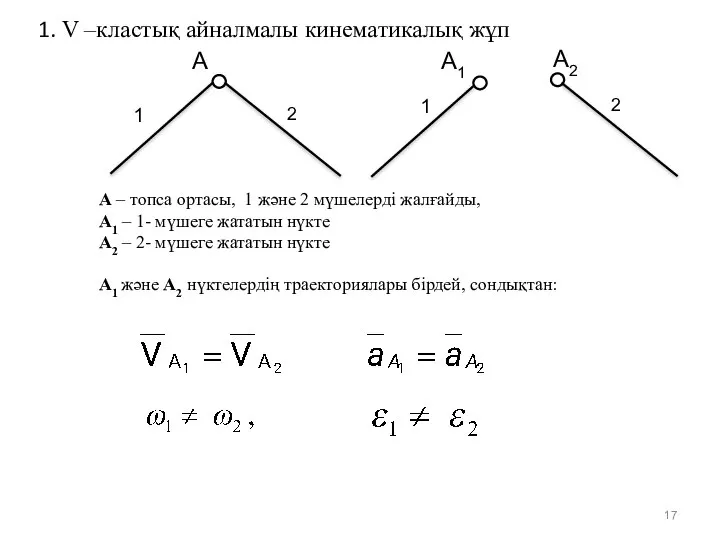
А1 және А2 нүктелердің траекториялары бірдей, сондықтан:
А
1. V –кластық айналмалы кинематикалық жұп
А
1
2
1
А1
А2
2
А1 және А2 нүктелердің траекториялары бірдей, сондықтан:
А
Слайд 32. V кластық ілгерлемелі кинематикалық жұп
В
В3
В4
3
4
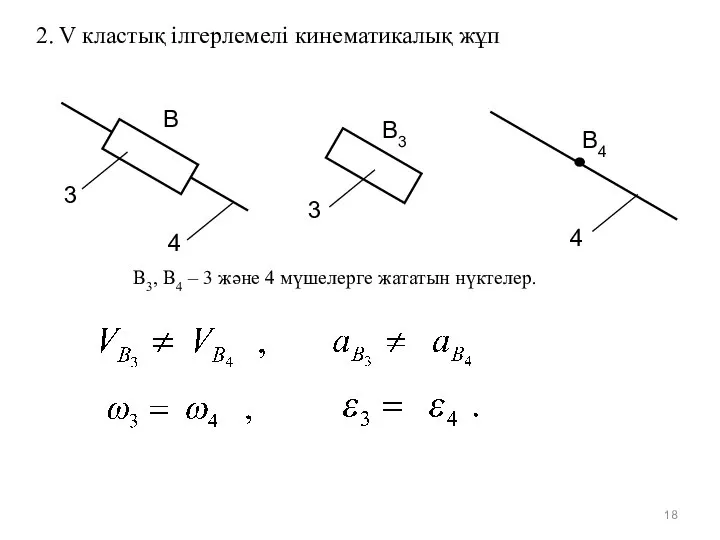
В3, В4 – 3 және 4 мүшелерге
2. V кластық ілгерлемелі кинематикалық жұп
В
В3
В4
3
4
В3, В4 – 3 және 4 мүшелерге
Слайд 43. Бір мүшенің күрделі қозғалысы
А
В
ωАВ
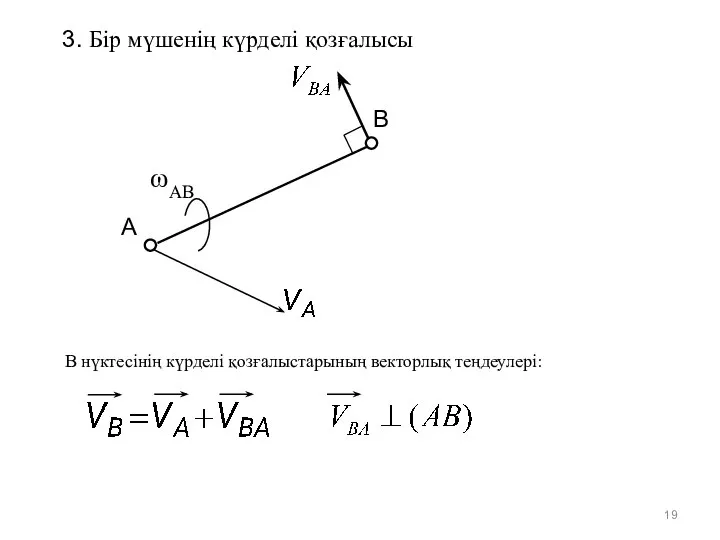
В нүктесінің күрделі қозғалыстарының векторлық теңдеулері:
3. Бір мүшенің күрделі қозғалысы
А
В
ωАВ
В нүктесінің күрделі қозғалыстарының векторлық теңдеулері:
Слайд 5В
4. Ілгерлемелі жұпта тасымалды қозғалыс айналмалы болса
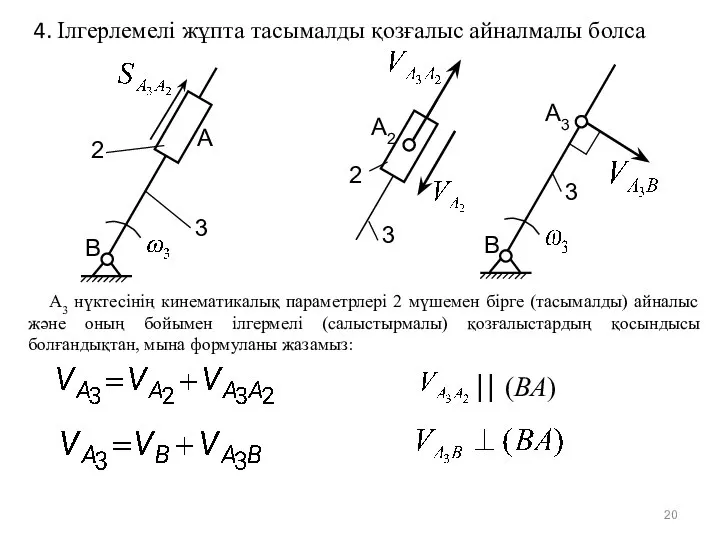
А3 нүктесінің кинематикалық параметрлері 2 мүшемен
В
4. Ілгерлемелі жұпта тасымалды қозғалыс айналмалы болса
А3 нүктесінің кинематикалық параметрлері 2 мүшемен
Слайд 65
d4.5
- 5
3
2
1
c
4
(CB) ║
║ (Ox)
a
d3
в
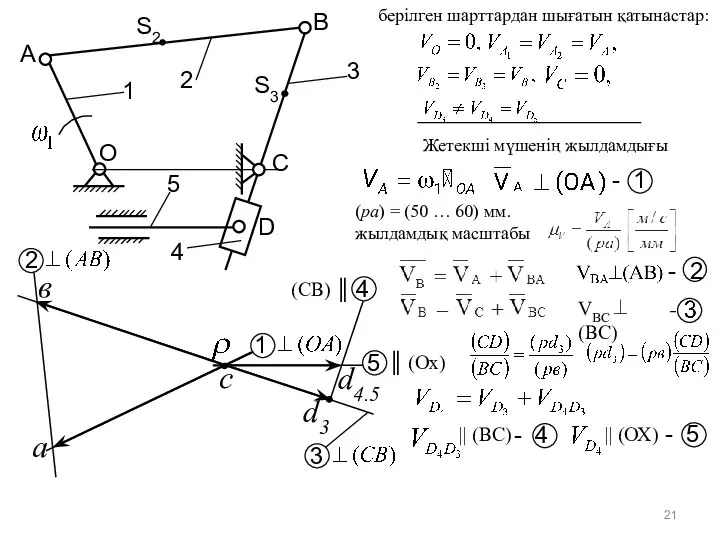
берілген шарттардан шығатын қатынастар:
Жетекші мүшенің жылдамдығы
- 1
(ра) =
5
d4.5
- 5
3
2
1
c
4
(CB) ║
║ (Ox)
a
d3
в
берілген шарттардан шығатын қатынастар:
Жетекші мүшенің жылдамдығы
- 1
(ра) =
Слайд 75
d4.5
3
2
1
c
4
(CB) ║
║ (Ox)
a
d3
в
s2
s3
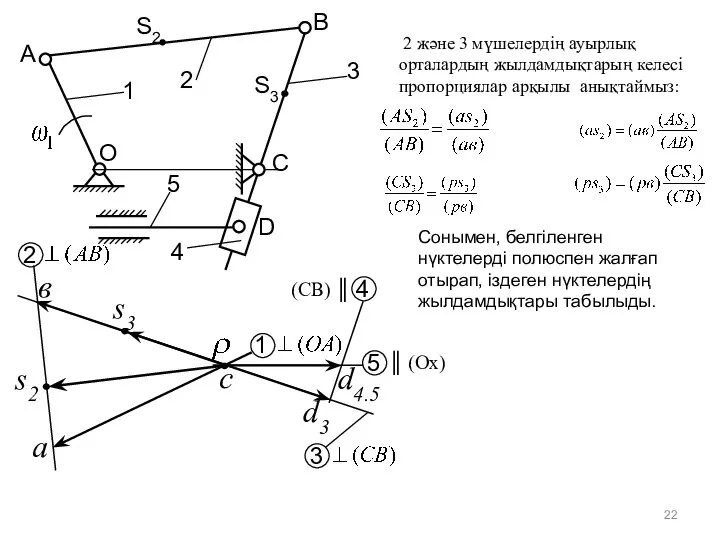
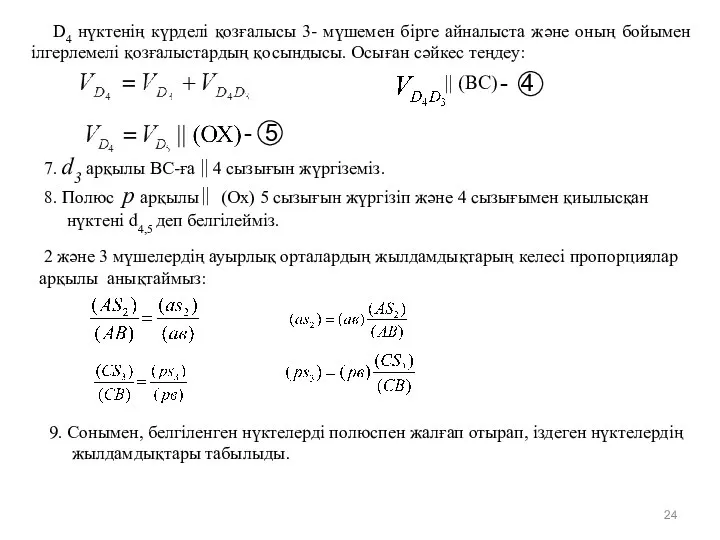
2 және 3 мүшелердің ауырлық орталардың жылдамдықтарың келесі
5
d4.5
3
2
1
c
4
(CB) ║
║ (Ox)
a
d3
в
s2
s3
2 және 3 мүшелердің ауырлық орталардың жылдамдықтарың келесі
Слайд 8- 3
- 2
р полюсынан 1 сызығын (ОА) перпендикуляр жүргізіп, (ра) кесіндісін
- 3
- 2
р полюсынан 1 сызығын (ОА) перпендикуляр жүргізіп, (ра) кесіндісін
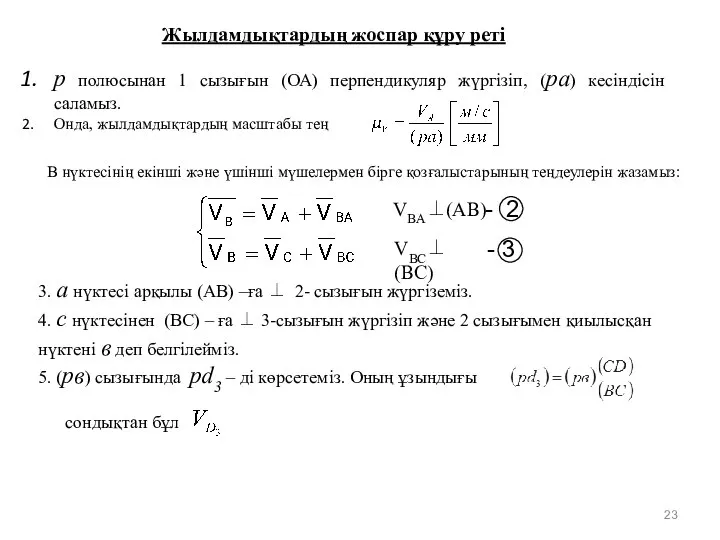
Слайд 97. d3 арқылы ВС-ға 4 сызығын жүргіземіз.
8. Полюс р арқылы (Ох) 5
7. d3 арқылы ВС-ға 4 сызығын жүргіземіз.
8. Полюс р арқылы (Ох) 5
Слайд 10Салу нәтижелерден есептейміз :
Салу нәтижелерден есептейміз :
 Поиск эффективных способов преобразования энергии морских волн в энергию поступательного движения судна
Поиск эффективных способов преобразования энергии морских волн в энергию поступательного движения судна Презентация на тему Опытная проверка закона Гей - Люссака
Презентация на тему Опытная проверка закона Гей - Люссака  Электромагнитное поле. Викторина
Электромагнитное поле. Викторина Электромагнитные колебания. Превращение энергии в колебательном контуре
Электромагнитные колебания. Превращение энергии в колебательном контуре Оценка угла места в системах локации метрового диапазона
Оценка угла места в системах локации метрового диапазона Бионика. Аэродинамические прототипы
Бионика. Аэродинамические прототипы Полная ревизия буксового узла подготовил студент группы ТАВХ-311
Полная ревизия буксового узла подготовил студент группы ТАВХ-311 Действие магнитного поля на проводник с током и движущуюся заряженную частицу
Действие магнитного поля на проводник с током и движущуюся заряженную частицу Составные части велосипеда
Составные части велосипеда Антуан Анри Беккерель
Антуан Анри Беккерель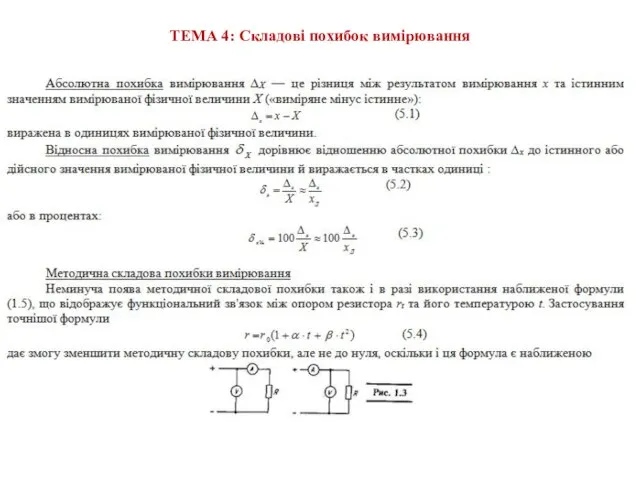 Складові похибок вимірювання. Тема 4
Складові похибок вимірювання. Тема 4 Устройство системы смазки двигателя. Назначение общее устройство системы смазки автомобильных двигателей
Устройство системы смазки двигателя. Назначение общее устройство системы смазки автомобильных двигателей Звездный час. Урок – игра
Звездный час. Урок – игра Статика
Статика Примеры физических явлений
Примеры физических явлений Potential Flow Theory
Potential Flow Theory Тепловое движение. Температура
Тепловое движение. Температура Спектроскопия упруго-рассеянных электронов на отражение
Спектроскопия упруго-рассеянных электронов на отражение Диэлектрические свойства полимеров
Диэлектрические свойства полимеров Электрические цепи со взаимной индукцией
Электрические цепи со взаимной индукцией Путешествие по океану Знаний
Путешествие по океану Знаний Маятник с инерционным маховиком
Маятник с инерционным маховиком Теория и практика формообразования заготовок
Теория и практика формообразования заготовок Основные понятия и определения. Рабочий процесс. Схема одноцилиндрового четырехтактного двигателя
Основные понятия и определения. Рабочий процесс. Схема одноцилиндрового четырехтактного двигателя Магнитная индукция
Магнитная индукция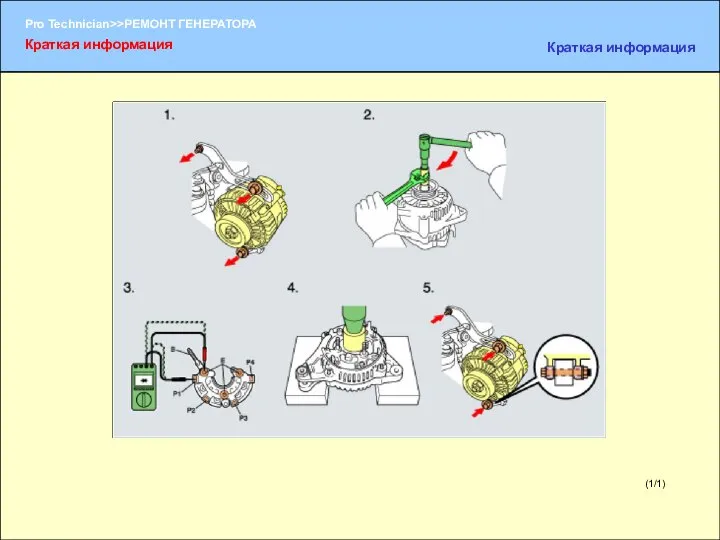 Ремонт генератора
Ремонт генератора Презентация на тему Кинетическая и потенциальная энергия
Презентация на тему Кинетическая и потенциальная энергия  Муфта сцепления на тракторе
Муфта сцепления на тракторе