- Корреляционные лаги

Содержание
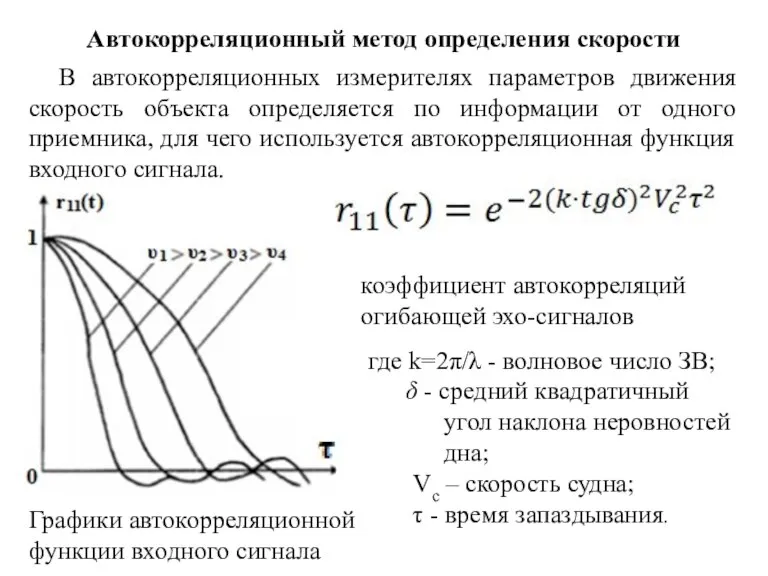
- 2. Автокорреляционный метод определения скорости В автокорреляционных измерителях параметров движения скорость объекта определяется по информации от одного
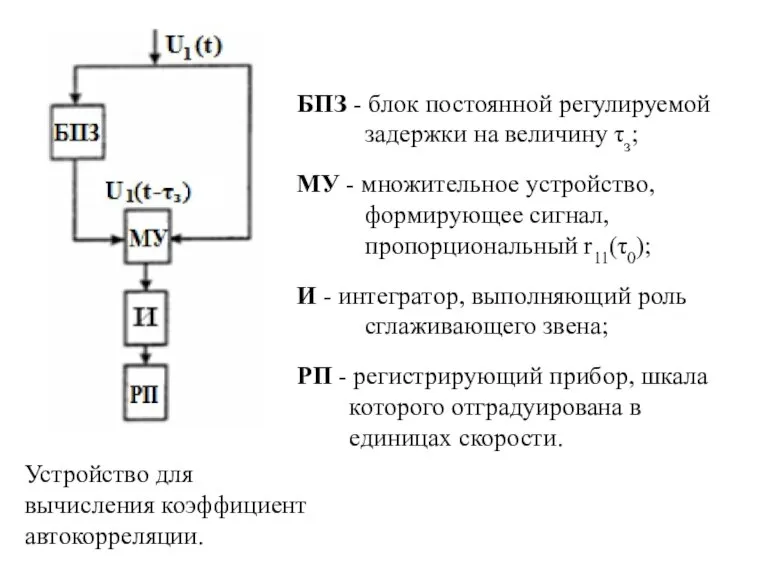
- 3. Устройство для вычисления коэффициент автокорреляции. БПЗ - блок постоянной регулируемой задержки на величину τз; МУ -
- 4. Взаимокорреляционный метод измерения скорости Корреляционно-экстремальная навигационная система без памяти - это корреляционные измерители скорости движения, в
- 5. Амплитуда и фаза эхо-сигналов, принятых антеннами П1 и П2 зависят от хода лучей (хо+х1) и (хо+х2).
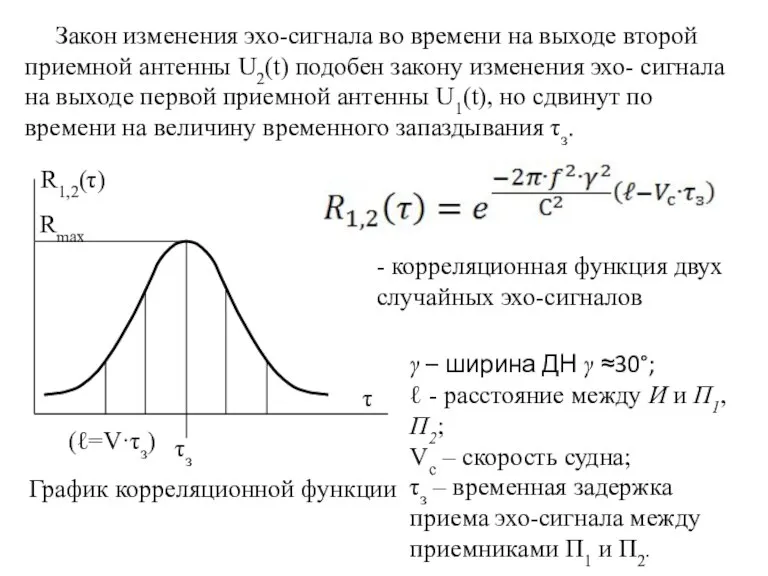
- 6. Закон изменения эхо-сигнала во времени на выходе второй приемной антенны U2(t) подобен закону изменения эхо- сигнала
- 8. Погрешности корреляционного лага Основную группу погрешностей составляют следующие: 1. Методические погрешности, связанные с методом измерения скорости
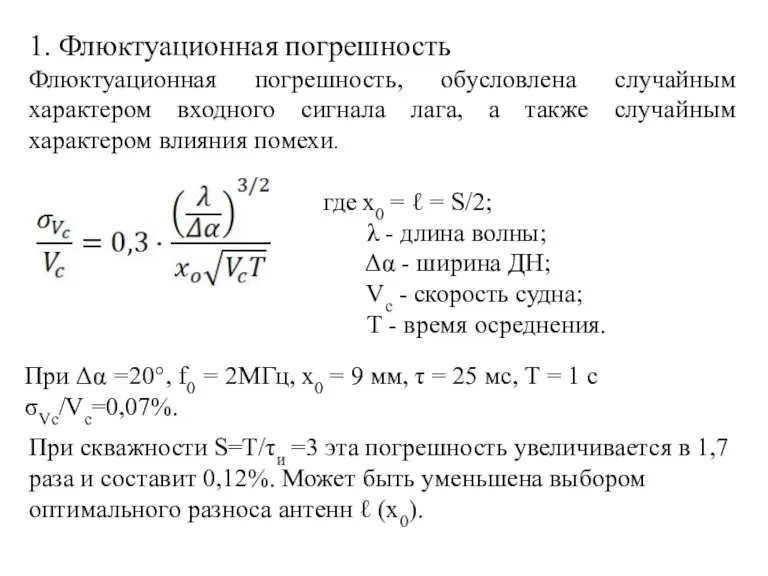
- 9. 1. Флюктуационная погрешность Флюктуационная погрешность, обусловлена случайным характером входного сигнала лага, а также случайным характером влияния
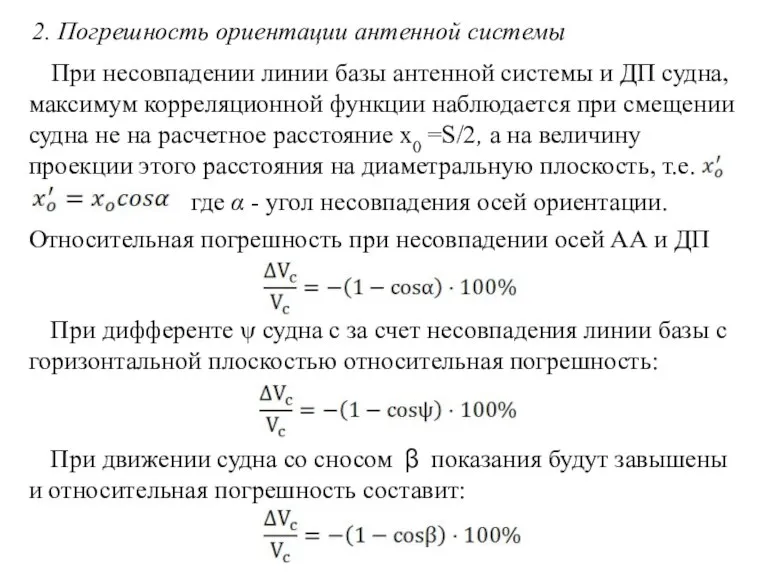
- 10. 2. Погрешность ориентации антенной системы При несовпадении линии базы антенной системы и ДП судна, максимум корреляционной
- 11. При движении судна со сносом β, имея дифферент ψ, относительная погрешность составит: На точность показаний лага
- 12. Инструментальные погрешности обусловлены: 1. Неидентичностью амплитудных и фазовых характеристик каналов приемного тракта лага, в результате чего
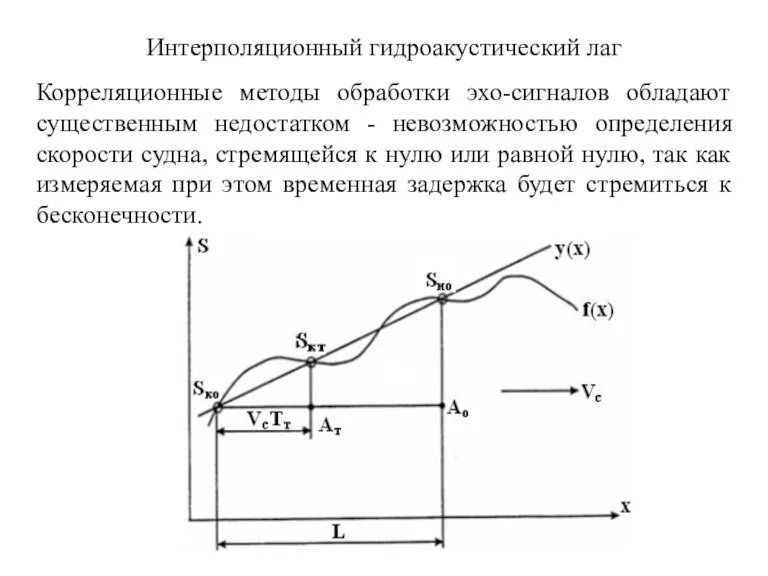
- 13. Интерполяционный гидроакустический лаг Корреляционные методы обработки эхо-сигналов обладают существенным недостатком - невозможностью определения скорости судна, стремящейся
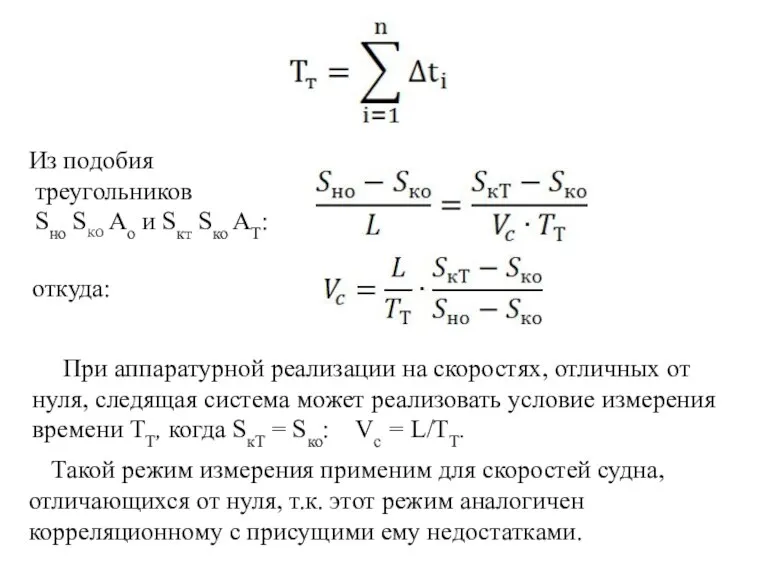
- 14. Из подобия треугольников Sно Sко Aо и Sкт Sко AТ: откуда: При аппаратурной реализации на скоростях,
- 15. Гидроакустическая антенна Корреляционного лага SAL-860 ("Speed Log") Гидроакустическая антенна корреляционного лага SAL
- 16. Геоэлектромагнитный лаг Геоэлектромагнитный измеритель скорости по принципу работы основан на использовании явления электромагнитной индукции. Магнитное поле,
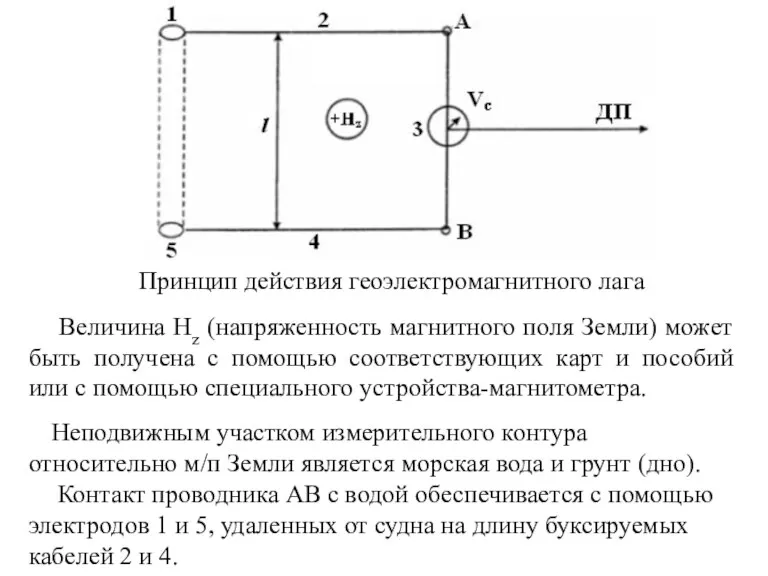
- 17. Принцип действия геоэлектромагнитного лага Величина Hz (напряженность магнитного поля Земли) может быть получена с помощью соответствующих
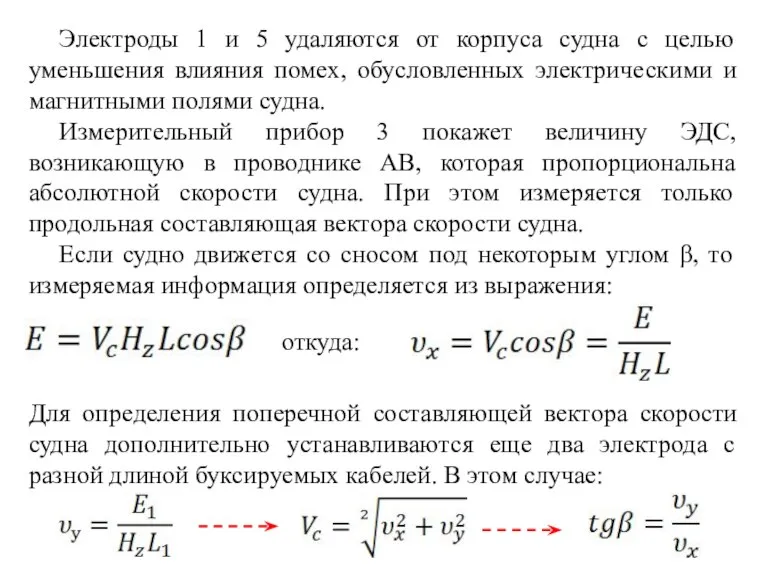
- 18. Электроды 1 и 5 удаляются от корпуса судна с целью уменьшения влияния помех, обусловленных электрическими и
- 19. Международные требования к оборудованию морских судов Глава V SOLAS – 74 посвящена правилам оснащения судов навигационной
- 20. Абсолютный лаг обязателен для установки на всех судах валовой вместимостью более 50000 р.т. Эксплуатационные требования к
- 21. Согласно А.224 (7) эхолот должен измерять глубины под излучателем от 2 м до 400 м. Эхолот
- 22. Примечание 3. Эхолот должен быть оснащен аварийно-предупредительной сигнализацией, которая срабатывает когда глубина воды под килем менее
- 24. Скачать презентацию
Слайд 2Автокорреляционный метод определения скорости
В автокорреляционных измерителях параметров движения скорость объекта определяется по
Автокорреляционный метод определения скорости
В автокорреляционных измерителях параметров движения скорость объекта определяется по
Слайд 3Устройство для вычисления коэффициент автокорреляции.
БПЗ - блок постоянной регулируемой задержки на величину
Устройство для вычисления коэффициент автокорреляции.
БПЗ - блок постоянной регулируемой задержки на величину
Слайд 4Взаимокорреляционный метод измерения скорости
Корреляционно-экстремальная навигационная система без памяти - это корреляционные измерители
Взаимокорреляционный метод измерения скорости
Корреляционно-экстремальная навигационная система без памяти - это корреляционные измерители
Слайд 5Амплитуда и фаза эхо-сигналов, принятых антеннами П1 и П2 зависят от хода
Амплитуда и фаза эхо-сигналов, принятых антеннами П1 и П2 зависят от хода
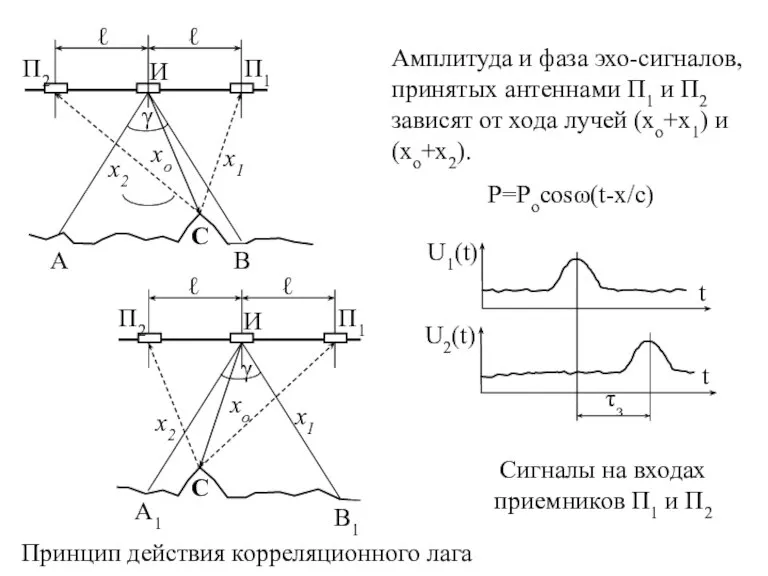
Слайд 6Закон изменения эхо-сигнала во времени на выходе второй приемной антенны U2(t) подобен
Закон изменения эхо-сигнала во времени на выходе второй приемной антенны U2(t) подобен
Слайд 8Погрешности корреляционного лага
Основную группу погрешностей составляют следующие:
1. Методические погрешности, связанные с методом
Погрешности корреляционного лага
Основную группу погрешностей составляют следующие:
1. Методические погрешности, связанные с методом
Слайд 91. Флюктуационная погрешность
Флюктуационная погрешность, обусловлена случайным характером входного сигнала лага, а также
1. Флюктуационная погрешность
Флюктуационная погрешность, обусловлена случайным характером входного сигнала лага, а также
Слайд 102. Погрешность ориентации антенной системы
При несовпадении линии базы антенной системы и ДП
2. Погрешность ориентации антенной системы
При несовпадении линии базы антенной системы и ДП
Слайд 11При движении судна со сносом β, имея дифферент ψ, относительная погрешность составит:
На
При движении судна со сносом β, имея дифферент ψ, относительная погрешность составит:
На
Слайд 12Инструментальные погрешности обусловлены:
1. Неидентичностью амплитудных и фазовых характеристик каналов приемного тракта лага,
Инструментальные погрешности обусловлены:
1. Неидентичностью амплитудных и фазовых характеристик каналов приемного тракта лага,
Слайд 13Интерполяционный гидроакустический лаг
Корреляционные методы обработки эхо-сигналов обладают существенным недостатком - невозможностью определения
Интерполяционный гидроакустический лаг
Корреляционные методы обработки эхо-сигналов обладают существенным недостатком - невозможностью определения
Слайд 14Из подобия
треугольников
Sно Sко Aо и Sкт Sко AТ:
откуда:
При аппаратурной реализации
Из подобия
треугольников
Sно Sко Aо и Sкт Sко AТ:
откуда:
При аппаратурной реализации
Слайд 15Гидроакустическая антенна Корреляционного лага
SAL-860 ("Speed Log")
Гидроакустическая антенна корреляционного лага
SAL
SAL-860 ("Speed Log")
Гидроакустическая антенна корреляционного лага
SAL

Слайд 16Геоэлектромагнитный лаг
Геоэлектромагнитный измеритель скорости по принципу работы основан на использовании явления электромагнитной
Геоэлектромагнитный лаг
Геоэлектромагнитный измеритель скорости по принципу работы основан на использовании явления электромагнитной
Слайд 17Принцип действия геоэлектромагнитного лага
Величина Hz (напряженность магнитного поля Земли) может быть получена
Принцип действия геоэлектромагнитного лага
Величина Hz (напряженность магнитного поля Земли) может быть получена
Слайд 18Электроды 1 и 5 удаляются от корпуса судна с целью уменьшения влияния
Электроды 1 и 5 удаляются от корпуса судна с целью уменьшения влияния
Слайд 19Международные требования к оборудованию морских судов
Глава V SOLAS – 74 посвящена правилам
Международные требования к оборудованию морских судов
Глава V SOLAS – 74 посвящена правилам
Слайд 20Абсолютный лаг обязателен для установки на всех судах валовой вместимостью более 50000
Абсолютный лаг обязателен для установки на всех судах валовой вместимостью более 50000
Слайд 21Согласно А.224 (7) эхолот должен измерять глубины под излучателем от 2 м
Согласно А.224 (7) эхолот должен измерять глубины под излучателем от 2 м
Слайд 22Примечание 3. Эхолот должен быть оснащен аварийно-предупредительной сигнализацией, которая срабатывает когда глубина
Примечание 3. Эхолот должен быть оснащен аварийно-предупредительной сигнализацией, которая срабатывает когда глубина
 Генерирование электрической энергии
Генерирование электрической энергии Презентация на тему Алкотестеры
Презентация на тему Алкотестеры 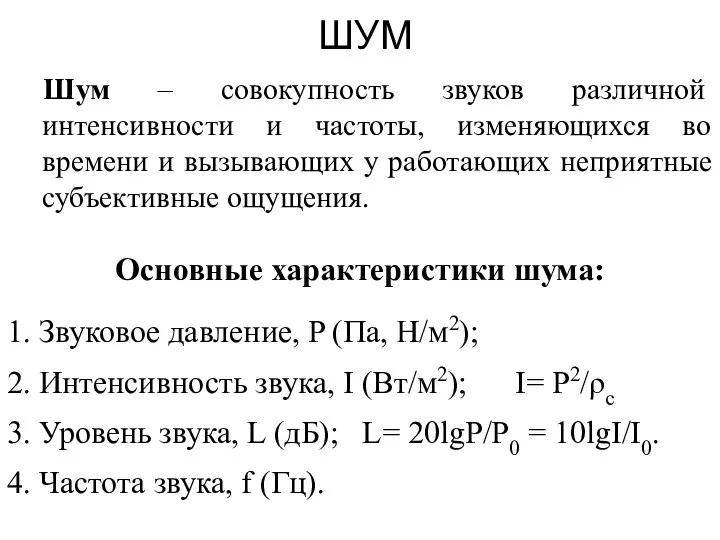 Шум
Шум Молекулярная физика
Молекулярная физика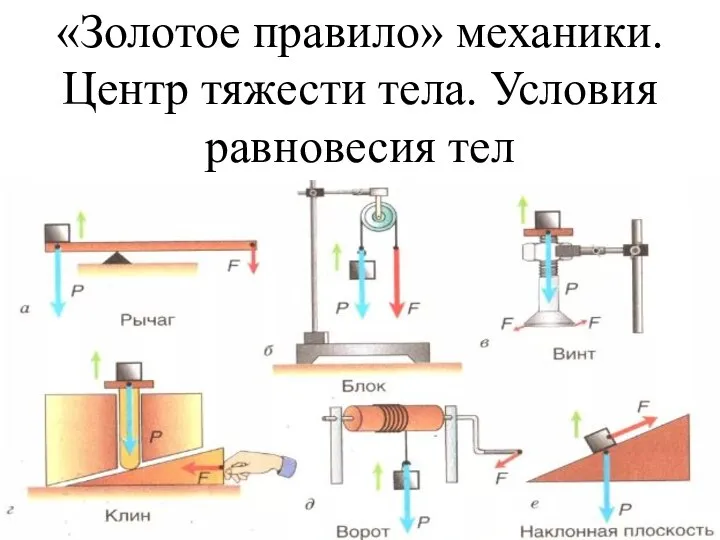 Золотое правило механики. Центр тяжести тела. Условия равновесия тел
Золотое правило механики. Центр тяжести тела. Условия равновесия тел Датчик давления КРАМС
Датчик давления КРАМС Блок цилиндров двигателя
Блок цилиндров двигателя Передача электрической энергии. Трансформаторы
Передача электрической энергии. Трансформаторы Масляная система. Часть 1
Масляная система. Часть 1 Геометрическая оптика. Прямолинейное распространение света. Отражение и преломление света
Геометрическая оптика. Прямолинейное распространение света. Отражение и преломление света Применение правила равновесия рычага к блоку. Золотое правило механики
Применение правила равновесия рычага к блоку. Золотое правило механики Презентация_Кинематика криволинейное движение (2)
Презентация_Кинематика криволинейное движение (2) Билет № 1, 4 (вопрос 3). Задача на формулу силы Лоренца
Билет № 1, 4 (вопрос 3). Задача на формулу силы Лоренца Типы астрономических объектов: галактики, звезды, планеты, астероиды, кометы, диффузное вещество
Типы астрономических объектов: галактики, звезды, планеты, астероиды, кометы, диффузное вещество 8. Особенности ЛЭП в 0,25 и 0,5 длину волны (1)
8. Особенности ЛЭП в 0,25 и 0,5 длину волны (1) Плавание тел в жидкости
Плавание тел в жидкости Графическое представление физического процесса - функция
Графическое представление физического процесса - функция Школа юного исследователя
Школа юного исследователя Сила скрученной резины. (2 класс)
Сила скрученной резины. (2 класс) Ламповый генератор
Ламповый генератор Равновесие тел
Равновесие тел Классификация композитов. Волокна и матрицы. Структура и назначение
Классификация композитов. Волокна и матрицы. Структура и назначение Разводка оптоволоконного кабеля между УстьКаменогорском и Урджаром
Разводка оптоволоконного кабеля между УстьКаменогорском и Урджаром Основы теории сплавов. Типы сплавов. Диаграммы состояния сплавов, принцип их построения. (Лекция 2)
Основы теории сплавов. Типы сплавов. Диаграммы состояния сплавов, принцип их построения. (Лекция 2) Результат опыта Ампера
Результат опыта Ампера Паралельне з’єднання провідників. Урок 51
Паралельне з’єднання провідників. Урок 51 Презентация на тему Изобретатель радио – А.С. Попов
Презентация на тему Изобретатель радио – А.С. Попов  Движение по окружности
Движение по окружности