- Маятник с инерционным маховиком

Содержание
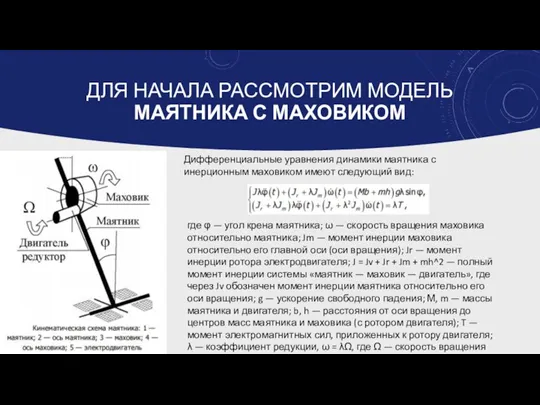
- 2. ДЛЯ НАЧАЛА РАССМОТРИМ МОДЕЛЬ МАЯТНИКА С МАХОВИКОМ Дифференциальные уравнения динамики маятника с инерционным маховиком имеют следующий
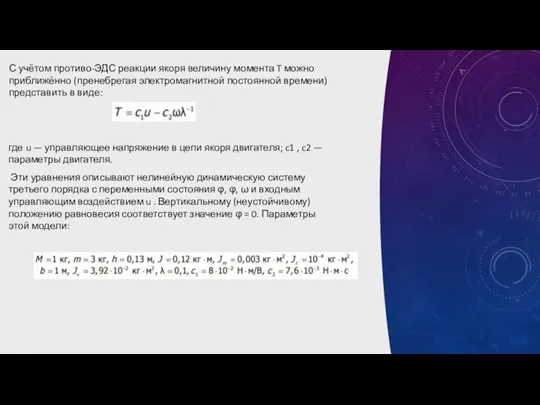
- 3. С учётом противо-ЭДС реакции якоря величину момента T можно приближённо (пренебрегая электромагнитной постоянной времени) представить в
- 4. ВИД ИНЕРЦИОННОГО МАЯТНИКА:
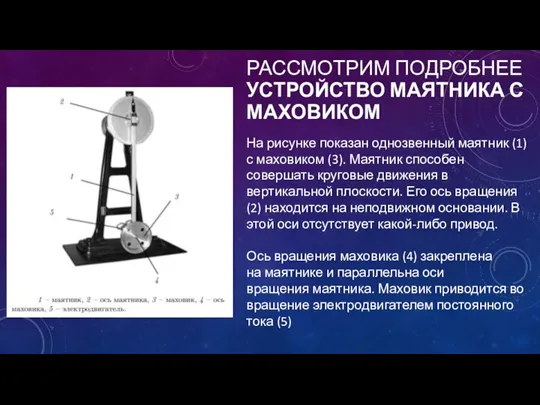
- 5. РАССМОТРИМ ПОДРОБНЕЕ УСТРОЙСТВО МАЯТНИКА С МАХОВИКОМ На рисунке показан однозвенный маятник (1) с маховиком (3). Маятник
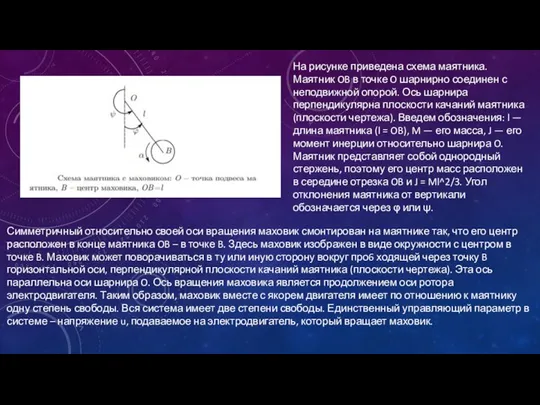
- 6. На рисунке приведена схема маятника. Маятник OB в точке O шарнирно соединен с неподвижной опорой. Ось
- 7. ЭЛЕКТРОПРИВОД, ТАКЖЕ КАК И МАХОВИК, СМОНТИРОВАН НА МАЯТНИКЕ. СТАТОР ДВИГАТЕЛЯ ЖЕСТКО СКРЕПЛЕН С МАЯТНИКОМ, ОСЬ РОТОРА
- 8. СТАБИЛИЗАЦИЯ ОПРОКИНУТЫМ ПОЛОЖЕНИЕМ РАВНОВЕСИЯ КОГДА ЧАСТОТА ВЫНУЖДЕННЫХ ОСЦИЛЛЯЦИЙ ТОЧКИ ПОДВЕСА ПРИБЛИЗИТЕЛЬНО ВДВОЕ БОЛЬШЕ ЧАСТОТЫ СОБСТВЕННЫХ КОЛЕБАНИЙ
- 9. ИНТЕРЕСНАЯ ЧЕРТА В ПОВЕДЕНИИ ЖЕСТКОГО МАЯТНИКА С ОСЦИЛЛИРУЮЩИМ ПОДВЕСОМ ЗАКЛЮЧАЕТСЯ В ДИНАМИЧЕСКОЙ СТАБИЛИЗАЦИИ ПЕРЕВЕРНУТОГО ПОЛОЖЕНИЯ. ПРИ
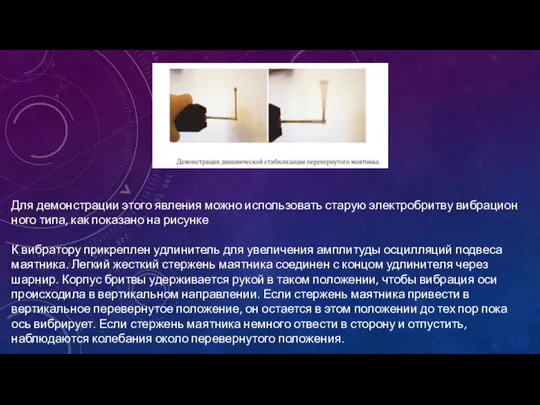
- 11. Для демонстрации этого явления можно использовать старую электробритву вибрационного типа, как показано на рисунке К вибратору
- 12. МЕТОД НЕЧЁТКОЙ ЛОГИКИ ГОВОРЯ О НЕЧЕТКОЙ ЛОГИКЕ, ЧАЩЕ ВСЕГО ИМЕЮТ В ВИДУ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА, КОТОРЫЕ
- 13. ОСНОВНЫМИ ЭТАПАМИ НЕЧЕТКОГО ВЫВОДА ЯВЛЯЮТСЯ: ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА. ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ. АГРЕГИРОВАНИЕ. АКТИВИЗАЦИЯ
- 14. ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА ПРОЦЕСС ФОРМИРОВАНИЯ БАЗЫ ПРАВИЛ НЕЧЕТКОГО ВЫВОДА ПРЕДСТАВЛЯЕТ СОБОЙ ФОРМАЛЬНОЕ ПРЕДСТАВЛЕНИЕ
- 15. ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ ФАЗЗИФИКАЦИЕЙ, ИЛИ ВВЕДЕНИЕМ НЕЧЕТКОСТИ, НАЗЫВАЕТСЯ ПРОЦЕСС НАХОЖДЕНИЯ ФУНКЦИИ ПРИНАДЛЕЖНОСТИ НЕЧЕТКИХ МНОЖЕСТВ НА ОСНОВЕ
- 16. АГРЕГИРОВАНИЕ ЦЕЛЬЮ ДАННОГО ЭТАПА ЯВЛЯЕТСЯ ОПРЕДЕЛЕНИЕ СТЕПЕНИ ИСТИННОСТИ КАЖДОГО ИЗ ПОДЗАКЛЮЧЕНИЙ ПО КАЖДОМУ ИЗ ПРАВИЛ СИСТЕМ
- 17. АКТИВАЦИЯ ПОДУСЛОВИЙ В НЕЧЁТКИХ ПРАВИЛАХ ПРОДУКЦИЙ НЕЧЕТКИЕ ПОДМНОЖЕСТВА, НАЗНАЧЕННЫЕ ДЛЯ КАЖДОЙ ВЫХОДНОЙ ПЕРЕМЕННОЙ, ОБЪЕДИНЯЮТСЯ ВМЕСТЕ, ЧТОБЫ
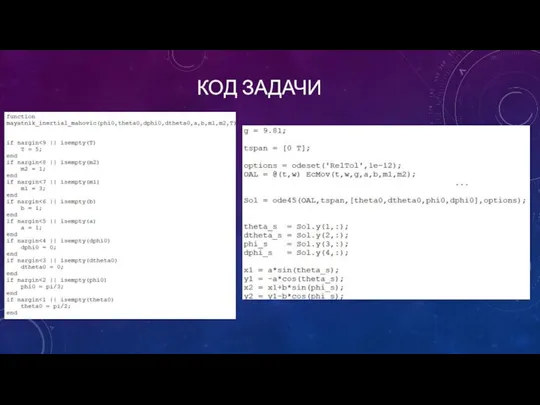
- 18. КОД ЗАДАЧИ
- 20. Скачать презентацию
Слайд 2ДЛЯ НАЧАЛА РАССМОТРИМ МОДЕЛЬ
МАЯТНИКА С МАХОВИКОМ
Дифференциальные уравнения динамики маятника с инерционным маховиком имеют
ДЛЯ НАЧАЛА РАССМОТРИМ МОДЕЛЬ
МАЯТНИКА С МАХОВИКОМ
Дифференциальные уравнения динамики маятника с инерционным маховиком имеют
Слайд 3С учётом противо-ЭДС реакции якоря величину момента T можно приближённо (пренебрегая электромагнитной
С учётом противо-ЭДС реакции якоря величину момента T можно приближённо (пренебрегая электромагнитной
Слайд 4ВИД ИНЕРЦИОННОГО МАЯТНИКА:
ВИД ИНЕРЦИОННОГО МАЯТНИКА:

Слайд 5РАССМОТРИМ ПОДРОБНЕЕ
УСТРОЙСТВО МАЯТНИКА С МАХОВИКОМ
На рисунке показан однозвенный маятник (1) с
РАССМОТРИМ ПОДРОБНЕЕ
УСТРОЙСТВО МАЯТНИКА С МАХОВИКОМ
На рисунке показан однозвенный маятник (1) с
Слайд 6На рисунке приведена схема маятника. Маятник OB в точке O шарнирно соединен
На рисунке приведена схема маятника. Маятник OB в точке O шарнирно соединен
Слайд 7ЭЛЕКТРОПРИВОД, ТАКЖЕ КАК И МАХОВИК, СМОНТИРОВАН НА МАЯТНИКЕ. СТАТОР ДВИГАТЕЛЯ ЖЕСТКО СКРЕПЛЕН С МАЯТНИКОМ, ОСЬ РОТОРА (ЯКОРЯ) ЖЕСТКО СОЕДИНЕНА С ОСЬЮ МАХОВИКА.
СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВКЛЮЧАЕТ ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР, КОНТРОЛЛЕР И УСИЛИТЕЛЬ МОЩНОСТИ, ЯВЛЯЮЩИЙСЯ ИСТОЧНИКОМ ПИТАНИЯ ДВИГАТЕЛЯ.
ПРИ УПРАВЛЕНИИ ИСПОЛЬЗУЕТСЯ ИНФОРМАЦИЯ ОБ УГЛАХ И СКОРОСТЯХ ПОВОРОТА МАЯТНИКА ОТНОСИТЕЛЬНО НЕПОДВИЖНОГО ОСНОВАНИЯ И МАХОВИКА ОТНОСИТЕЛЬНО МАЯТНИКА.
ЭТИ УГЛЫ ИЗМЕРЯЮТСЯ ИМПУЛЬСНЫМИ ДАТЧИКАМИ.
ЭЛЕКТРОПРИВОД, ТАКЖЕ КАК И МАХОВИК, СМОНТИРОВАН НА МАЯТНИКЕ. СТАТОР ДВИГАТЕЛЯ ЖЕСТКО СКРЕПЛЕН С МАЯТНИКОМ, ОСЬ РОТОРА (ЯКОРЯ) ЖЕСТКО СОЕДИНЕНА С ОСЬЮ МАХОВИКА.
СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВКЛЮЧАЕТ ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР, КОНТРОЛЛЕР И УСИЛИТЕЛЬ МОЩНОСТИ, ЯВЛЯЮЩИЙСЯ ИСТОЧНИКОМ ПИТАНИЯ ДВИГАТЕЛЯ.
ПРИ УПРАВЛЕНИИ ИСПОЛЬЗУЕТСЯ ИНФОРМАЦИЯ ОБ УГЛАХ И СКОРОСТЯХ ПОВОРОТА МАЯТНИКА ОТНОСИТЕЛЬНО НЕПОДВИЖНОГО ОСНОВАНИЯ И МАХОВИКА ОТНОСИТЕЛЬНО МАЯТНИКА.
ЭТИ УГЛЫ ИЗМЕРЯЮТСЯ ИМПУЛЬСНЫМИ ДАТЧИКАМИ.
Слайд 8СТАБИЛИЗАЦИЯ ОПРОКИНУТЫМ ПОЛОЖЕНИЕМ РАВНОВЕСИЯ
КОГДА ЧАСТОТА ВЫНУЖДЕННЫХ ОСЦИЛЛЯЦИЙ ТОЧКИ ПОДВЕСА ПРИБЛИЗИТЕЛЬНО ВДВОЕ БОЛЬШЕ
СТАБИЛИЗАЦИЯ ОПРОКИНУТЫМ ПОЛОЖЕНИЕМ РАВНОВЕСИЯ
КОГДА ЧАСТОТА ВЫНУЖДЕННЫХ ОСЦИЛЛЯЦИЙ ТОЧКИ ПОДВЕСА ПРИБЛИЗИТЕЛЬНО ВДВОЕ БОЛЬШЕ
Слайд 9ИНТЕРЕСНАЯ ЧЕРТА В ПОВЕДЕНИИ ЖЕСТКОГО МАЯТНИКА С ОСЦИЛЛИРУЮЩИМ ПОДВЕСОМ ЗАКЛЮЧАЕТСЯ В ДИНАМИЧЕСКОЙ
ИНТЕРЕСНАЯ ЧЕРТА В ПОВЕДЕНИИ ЖЕСТКОГО МАЯТНИКА С ОСЦИЛЛИРУЮЩИМ ПОДВЕСОМ ЗАКЛЮЧАЕТСЯ В ДИНАМИЧЕСКОЙ
Слайд 11Для демонстрации этого явления можно использовать старую электробритву вибрационного типа, как показано на рисунке
К вибратору прикреплен удлинитель для увеличения амплитуды осцилляций подвеса маятника. Легкий
Для демонстрации этого явления можно использовать старую электробритву вибрационного типа, как показано на рисунке
К вибратору прикреплен удлинитель для увеличения амплитуды осцилляций подвеса маятника. Легкий
Слайд 12МЕТОД НЕЧЁТКОЙ ЛОГИКИ
ГОВОРЯ О НЕЧЕТКОЙ ЛОГИКЕ, ЧАЩЕ ВСЕГО ИМЕЮТ В ВИДУ СИСТЕМЫ
МЕТОД НЕЧЁТКОЙ ЛОГИКИ
ГОВОРЯ О НЕЧЕТКОЙ ЛОГИКЕ, ЧАЩЕ ВСЕГО ИМЕЮТ В ВИДУ СИСТЕМЫ
Слайд 13ОСНОВНЫМИ ЭТАПАМИ НЕЧЕТКОГО ВЫВОДА ЯВЛЯЮТСЯ:
ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА.
ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ.
АГРЕГИРОВАНИЕ.
АКТИВИЗАЦИЯ ПОДУСЛОВИЙ В НЕЧЕТКИХ
ОСНОВНЫМИ ЭТАПАМИ НЕЧЕТКОГО ВЫВОДА ЯВЛЯЮТСЯ:
ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА.
ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ.
АГРЕГИРОВАНИЕ.
АКТИВИЗАЦИЯ ПОДУСЛОВИЙ В НЕЧЕТКИХ
Слайд 14ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА
ПРОЦЕСС ФОРМИРОВАНИЯ БАЗЫ ПРАВИЛ НЕЧЕТКОГО ВЫВОДА ПРЕДСТАВЛЯЕТ
ФОРМИРОВАНИЕ БАЗЫ ПРАВИЛ СИСТЕМЫ НЕЧЕТКОГО ВЫВОДА
ПРОЦЕСС ФОРМИРОВАНИЯ БАЗЫ ПРАВИЛ НЕЧЕТКОГО ВЫВОДА ПРЕДСТАВЛЯЕТ
Слайд 15ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ
ФАЗЗИФИКАЦИЕЙ, ИЛИ ВВЕДЕНИЕМ НЕЧЕТКОСТИ, НАЗЫВАЕТСЯ ПРОЦЕСС НАХОЖДЕНИЯ ФУНКЦИИ ПРИНАДЛЕЖНОСТИ НЕЧЕТКИХ
ФАЗЗИФИКАЦИЯ ВХОДНЫХ ПАРАМЕТРОВ
ФАЗЗИФИКАЦИЕЙ, ИЛИ ВВЕДЕНИЕМ НЕЧЕТКОСТИ, НАЗЫВАЕТСЯ ПРОЦЕСС НАХОЖДЕНИЯ ФУНКЦИИ ПРИНАДЛЕЖНОСТИ НЕЧЕТКИХ
Слайд 16АГРЕГИРОВАНИЕ
ЦЕЛЬЮ ДАННОГО ЭТАПА ЯВЛЯЕТСЯ ОПРЕДЕЛЕНИЕ СТЕПЕНИ ИСТИННОСТИ КАЖДОГО ИЗ ПОДЗАКЛЮЧЕНИЙ ПО КАЖДОМУ
АГРЕГИРОВАНИЕ
ЦЕЛЬЮ ДАННОГО ЭТАПА ЯВЛЯЕТСЯ ОПРЕДЕЛЕНИЕ СТЕПЕНИ ИСТИННОСТИ КАЖДОГО ИЗ ПОДЗАКЛЮЧЕНИЙ ПО КАЖДОМУ
Слайд 17АКТИВАЦИЯ ПОДУСЛОВИЙ В НЕЧЁТКИХ ПРАВИЛАХ ПРОДУКЦИЙ
НЕЧЕТКИЕ ПОДМНОЖЕСТВА, НАЗНАЧЕННЫЕ ДЛЯ КАЖДОЙ ВЫХОДНОЙ ПЕРЕМЕННОЙ,
АКТИВАЦИЯ ПОДУСЛОВИЙ В НЕЧЁТКИХ ПРАВИЛАХ ПРОДУКЦИЙ
НЕЧЕТКИЕ ПОДМНОЖЕСТВА, НАЗНАЧЕННЫЕ ДЛЯ КАЖДОЙ ВЫХОДНОЙ ПЕРЕМЕННОЙ,
Слайд 18КОД ЗАДАЧИ
КОД ЗАДАЧИ
 Термодинамика. Подготовка к контрольной работе
Термодинамика. Подготовка к контрольной работе Цепная передача
Цепная передача Акустооптические модуляторы света
Акустооптические модуляторы света Электромагнитная индукция. Опыты Фарадея
Электромагнитная индукция. Опыты Фарадея Равноускоренное движение. Ускорение
Равноускоренное движение. Ускорение Виды теплопередачи
Виды теплопередачи Электричество и магнетизм. Лекция 09
Электричество и магнетизм. Лекция 09 Потери электроэнергии в электрических сетях
Потери электроэнергии в электрических сетях Открытие В.К. Рентгеном Х-лучей. Открытие А. Беккерелем явления радиоактивности
Открытие В.К. Рентгеном Х-лучей. Открытие А. Беккерелем явления радиоактивности Отказы
Отказы Электрический ток в электролитах (жидкостях)
Электрический ток в электролитах (жидкостях) Ответы на вопросы
Ответы на вопросы Презентация на тему Равноускоренное прямолинейное движение
Презентация на тему Равноускоренное прямолинейное движение  Измерение фокусного расстояния собирающей линзы. Получение изображений при помощи линзы
Измерение фокусного расстояния собирающей линзы. Получение изображений при помощи линзы Испарение и конденсация жидкости
Испарение и конденсация жидкости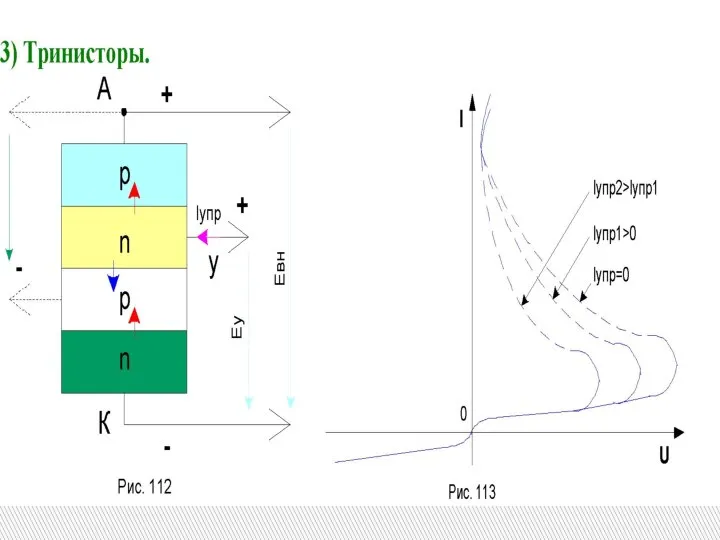 Тринисторы
Тринисторы Электрические свойства. Электропороводность и диэлектрическая проницаемость
Электрические свойства. Электропороводность и диэлектрическая проницаемость Поиск темной материи в канале ассоциированного рождения калибровочного бозона Z 0 и частицы темной материи
Поиск темной материи в канале ассоциированного рождения калибровочного бозона Z 0 и частицы темной материи История развития физики. Физика и техника
История развития физики. Физика и техника Учебно-исследовательская работа студентов. Процесс регулирования. Регулятор Уатта
Учебно-исследовательская работа студентов. Процесс регулирования. Регулятор Уатта Никола Тесла и его электричество
Никола Тесла и его электричество Sondertraining Service Technik Технические инновации. Общая информация
Sondertraining Service Technik Технические инновации. Общая информация Презентация на тему Биологическое действие радиоактивных излучений
Презентация на тему Биологическое действие радиоактивных излучений  Магнитное поле и его графическое изображение. Однородное и неоднородное поле
Магнитное поле и его графическое изображение. Однородное и неоднородное поле Презентация 2
Презентация 2 Вариант расчета ФР. Закон смещения Вина
Вариант расчета ФР. Закон смещения Вина Оптика. Лекция 3.2
Оптика. Лекция 3.2 Параллельная работа одинаковых трубопроводов
Параллельная работа одинаковых трубопроводов