- Механические колебания и волны

Содержание
- 2. План лекции Свободные незатухающие гармонические колебания: Пружинный маятник Математический маятник Крутильный маятник Физический маятник Затухающие колебания
- 3. Демонстрации Автоколебания Резонанс камертонов Параметрический резонанс Маятник Капицы Волна в массивной пружине
- 4. Колебательные процессы Колебание – изменение состояния системы по периодическому или почти периодическому закону: маятник часов, груз
- 5. Свободные незатухающие гармонические колебания. Пружинный маятник mx” = - kx ⇨ mx” + kx = 0
- 6. Скорость и ускорение при гармонических колебаниях Смещение: x = Acos(ω0t + φ0) Скорость: v = x’
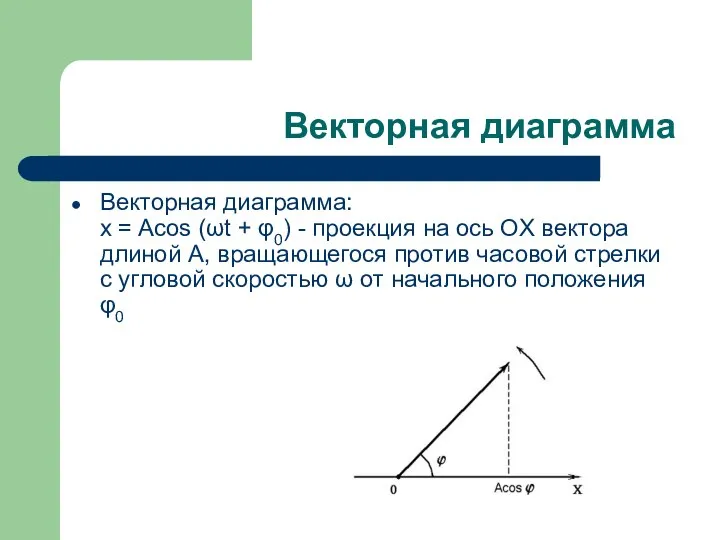
- 7. Векторная диаграмма Векторная диаграмма: x = Acos (ωt + φ0) - проекция на ось OX вектора
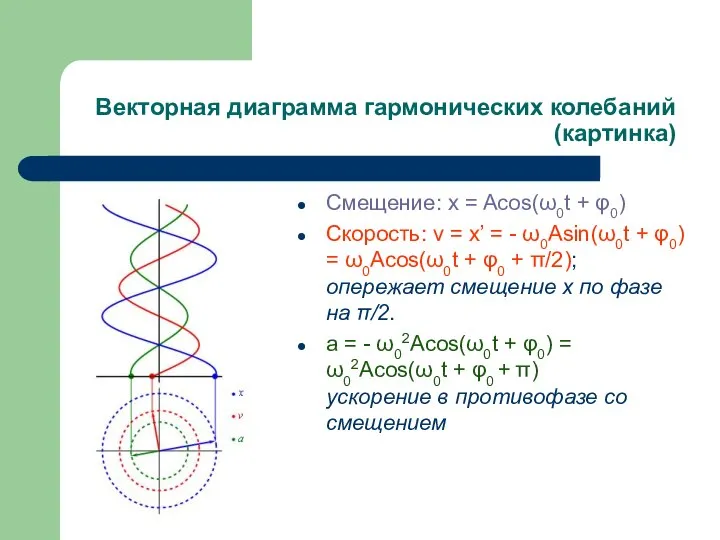
- 8. Векторная диаграмма гармонических колебаний (картинка) Смещение: x = Acos(ω0t + φ0) Скорость: v = x’ =
- 9. Энергия гармонических колебаний Потенциальная энергия: П = kx2/2 = ½kA2cos2(ω0t + φ0) Кинетическая энергия: K =
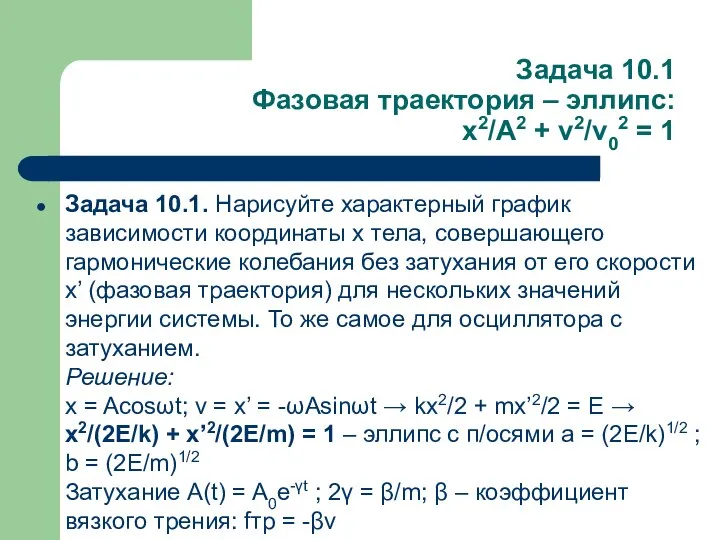
- 10. Задача 10.1 Фазовая траектория – эллипс: x2/A2 + v2/v02 = 1 Задача 10.1. Нарисуйте характерный график
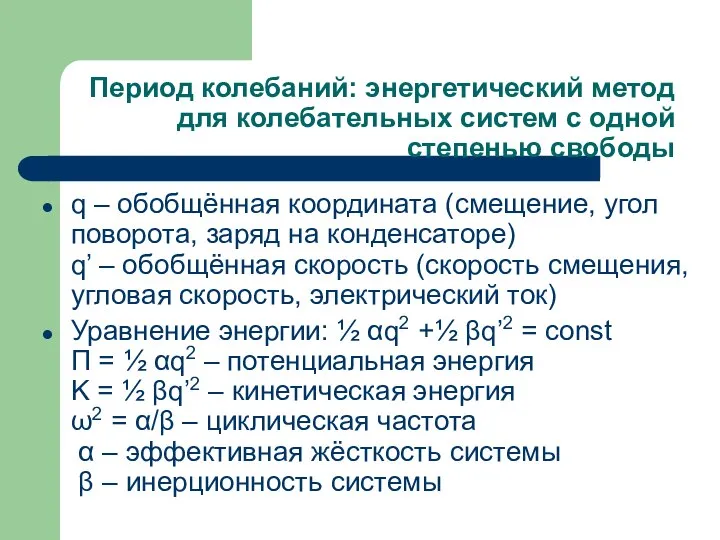
- 11. Период колебаний: энергетический метод для колебательных систем с одной степенью свободы q – обобщённая координата (смещение,
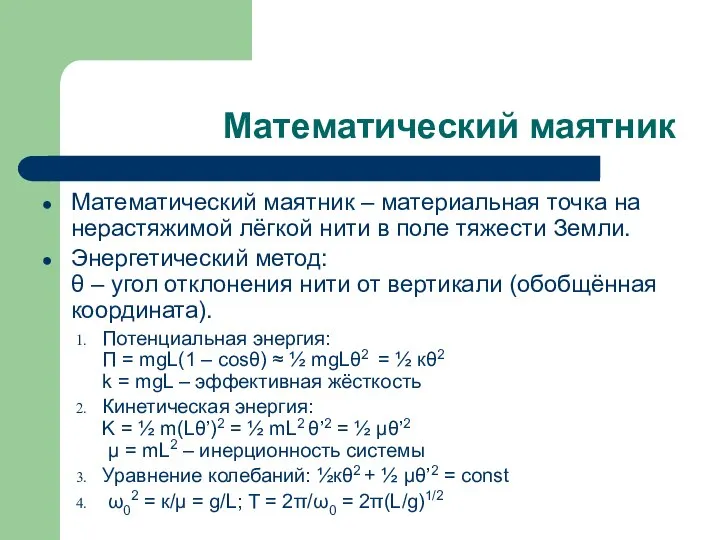
- 12. Математический маятник Математический маятник – материальная точка на нерастяжимой лёгкой нити в поле тяжести Земли. Энергетический
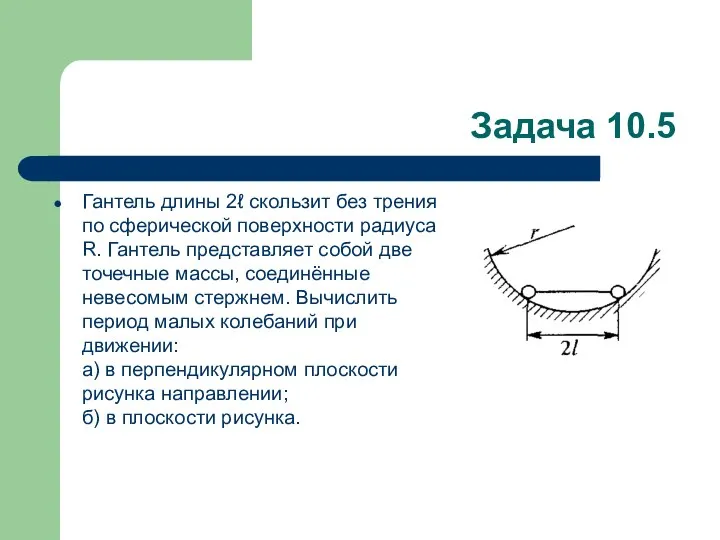
- 13. Задача 10.5 Гантель длины 2ℓ скользит без трения по сферической поверхности радиуса R. Гантель представляет собой
- 14. Решение Решение: b) П = 2mgr(1 – cosα) = ½ (2mgrφ2) = ½(2mgφ2(R2 - ℓ2)1/2; K
- 15. Крутильный маятник
- 16. Крутильные колебания Диск на упругой нити: Момент упругих сил Mz = - kθ, k – коэффициент
- 17. Физический маятник Физический маятник - твёрдое тело, совершающее колебания вокруг неподвижной горизонтальной оси. Энергетический метод: Потенциальная
- 18. Приведённая длина. Центр качания. Теорема Гюйгенса. Оборотный маятник и измерение g Lпр = I/ma – длина
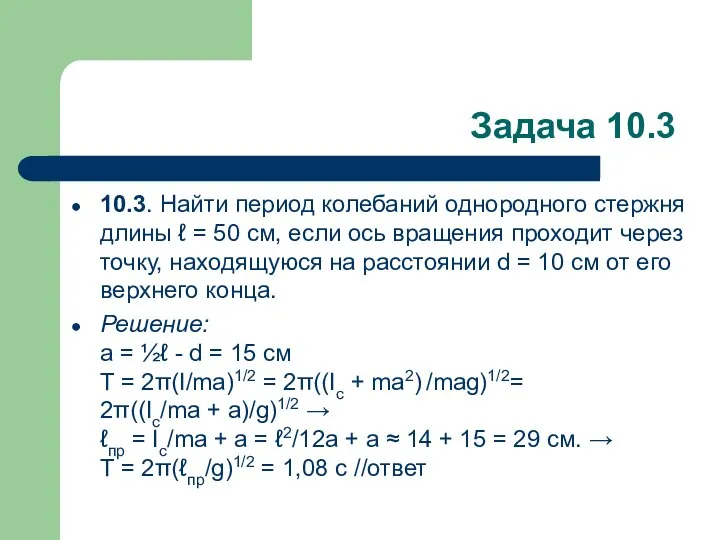
- 19. Задача 10.3 10.3. Найти период колебаний однородного стержня длины ℓ = 50 см, если ось вращения
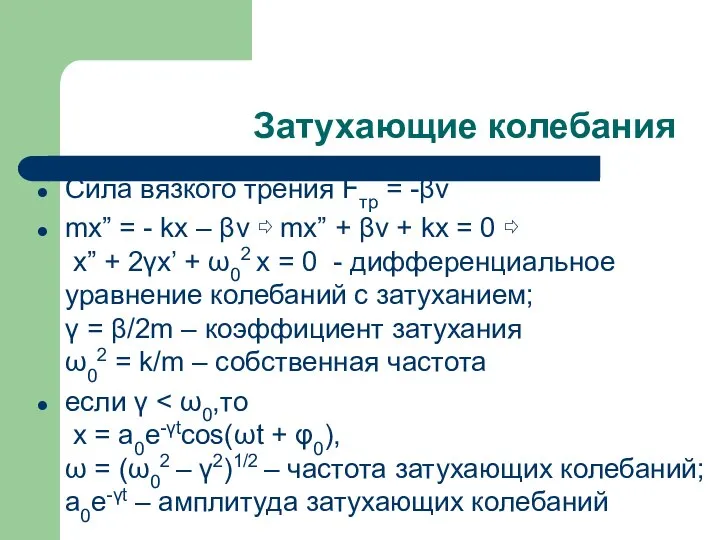
- 20. Затухающие колебания Сила вязкого трения Fтр = -βv mx” = - kx – βv ⇨ mx”
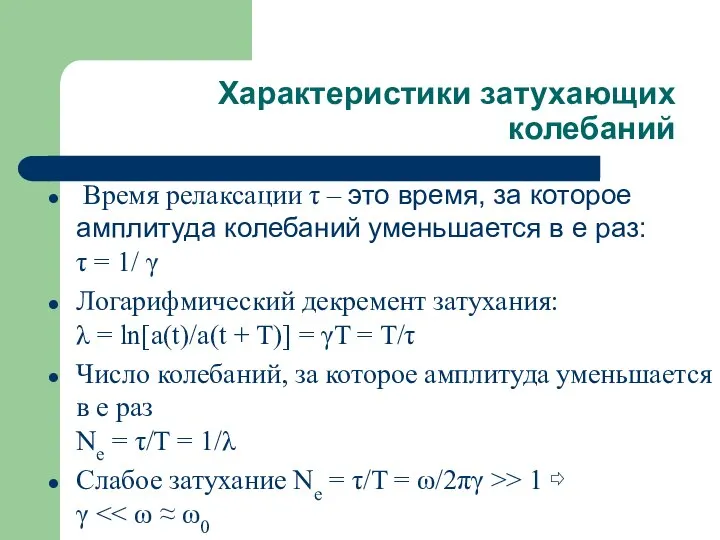
- 21. Характеристики затухающих колебаний Время релаксации τ – это время, за которое амплитуда колебаний уменьшается в e
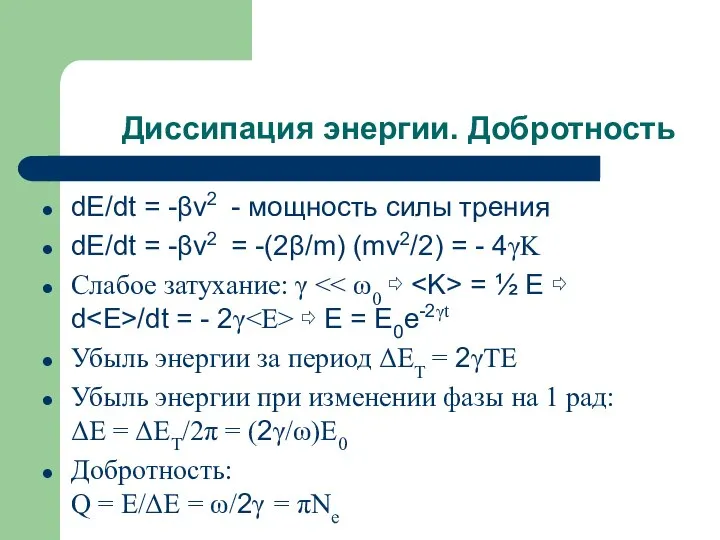
- 22. Диссипация энергии. Добротность dE/dt = -βv2 - мощность силы трения dE/dt = -βv2 = -(2β/m) (mv2/2)
- 23. Задача 10.2 Зная период колебаний T и время уменьшения амплитуды колебаний в 2 раза τ, найдите
- 24. Задача 10.4 Свободные колебания математического маятника массы m, длиной ℓ испытывают затухание из-за трения о воздух.
- 25. Решение 10.4 A = A0e-γt → ΔA = A0γT → ΔE = kA0ΔA = mu2/2 →
- 26. Вынужденные колебания. Векторные диаграммы. Резонанс mx” + βv + kx = Fcosωt ⇨ x” + 2γx’
- 27. Вынужденные колебания. Векторные диаграммы. Резонанс Из векторной диаграммы: амплитуда B = f/((ω2 – ω02)2 + 4γ2ω2)1/2
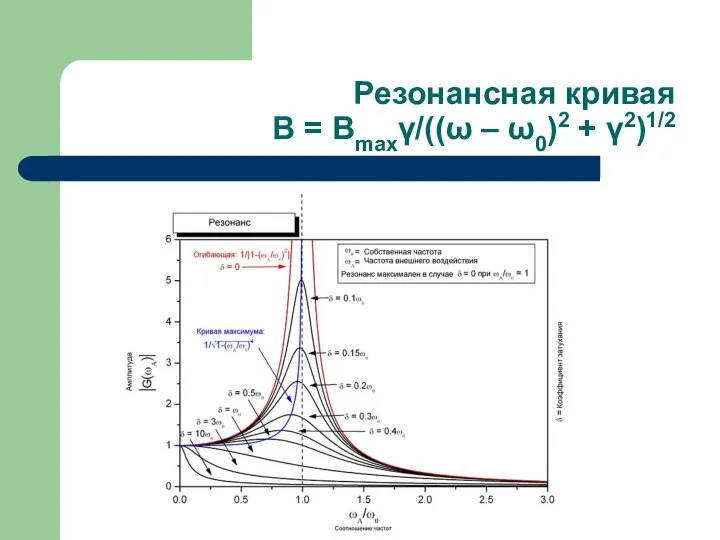
- 28. Резонансная кривая B = Bmaxγ/((ω – ω0)2 + γ2)1/2
- 29. Параметрический резонанс Параметрический резонанс - возбуждение незатухающих колебаний периодическим изменением параметров колебательной системы Пример: маятник с
- 30. Ангармонический математический маятник ½кθ2 + ½ μθ’2 = const ⇨ θ” + ω02 θ = 0
- 31. Волновое уравнение. Скорость упругих волн в тонком стержне ∂2x/∂t2 = v2 ∂2x/∂z2 общее решение волнового уравнения:
- 32. Численные примеры (сталь) Модуль Юнга: E0 = 2 1011 Н/м2 = 2 Мбар; коэффициент Пуассона μ
- 33. Численные примеры (алюминий) Модуль Юнга: E0 = 0,705 1011 Н/м2 = 0,705 Мбар; коэффициент Пуассона μ
- 34. Скорость звука в жидкостях и газах В газе Δz/z = ΔV/V = Δp/Е ⇨ модуль упругости
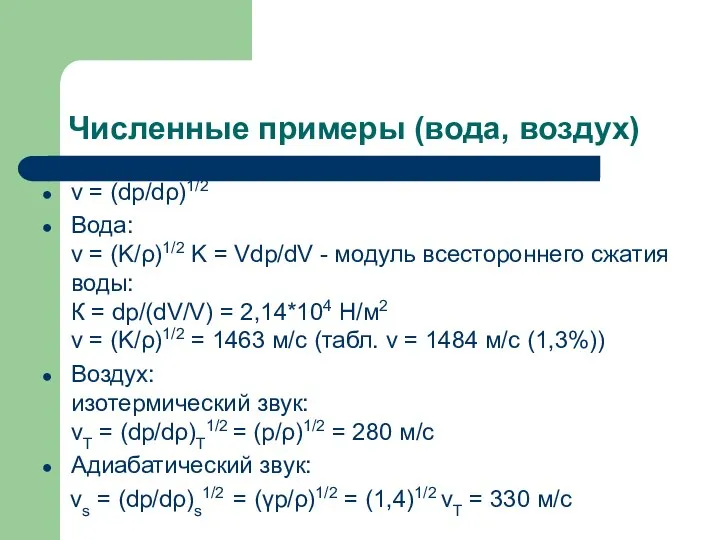
- 35. Численные примеры (вода, воздух) v = (dp/dρ)1/2 Вода: v = (K/ρ)1/2 K = Vdp/dV - модуль
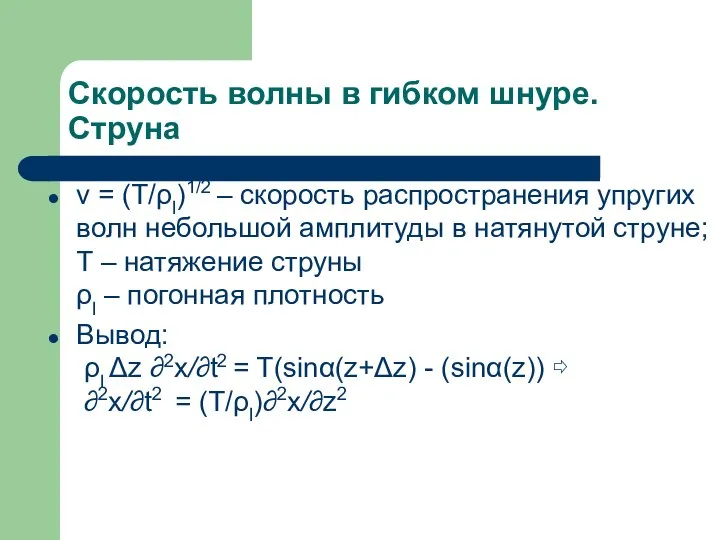
- 36. Скорость волны в гибком шнуре. Струна v = (T/ρl)1/2 – скорость распространения упругих волн небольшой амплитуды
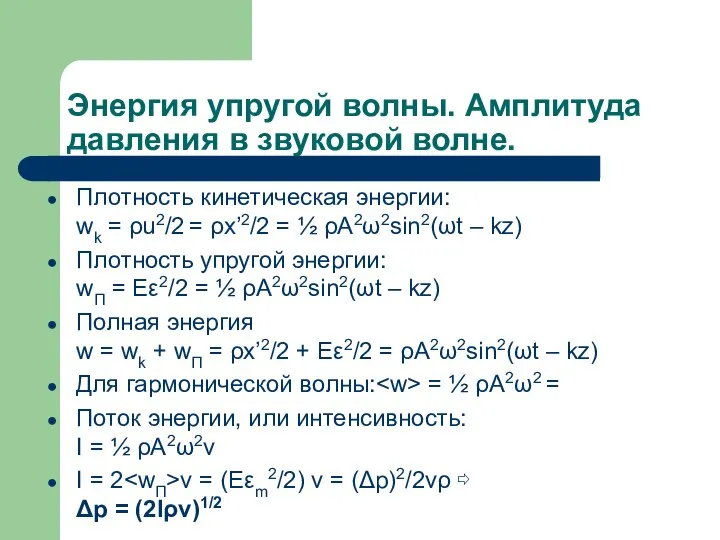
- 37. Энергия упругой волны. Амплитуда давления в звуковой волне. Плотность кинетическая энергии: wk = ρu2/2 = ρx’2/2
- 39. Скачать презентацию
Слайд 2План лекции
Свободные незатухающие гармонические колебания:
Пружинный маятник
Математический маятник
Крутильный маятник
Физический маятник
Затухающие колебания с
План лекции
Свободные незатухающие гармонические колебания:
Пружинный маятник
Математический маятник
Крутильный маятник
Физический маятник
Затухающие колебания с
Слайд 3Демонстрации
Автоколебания
Резонанс камертонов
Параметрический резонанс
Маятник Капицы
Волна в массивной пружине
Демонстрации
Автоколебания
Резонанс камертонов
Параметрический резонанс
Маятник Капицы
Волна в массивной пружине
Слайд 4Колебательные процессы
Колебание – изменение состояния системы по периодическому или почти периодическому закону:
Колебательные процессы
Колебание – изменение состояния системы по периодическому или почти периодическому закону:
Слайд 5Свободные незатухающие
гармонические колебания.
Пружинный маятник
mx” = - kx ⇨ mx” + kx
Свободные незатухающие
гармонические колебания.
Пружинный маятник
mx” = - kx ⇨ mx” + kx
Слайд 6Скорость и ускорение при гармонических колебаниях
Смещение:
x = Acos(ω0t + φ0)
Скорость:
v =
Скорость и ускорение при гармонических колебаниях
Смещение:
x = Acos(ω0t + φ0)
Скорость:
v =
Слайд 7Векторная диаграмма
Векторная диаграмма:
x = Acos (ωt + φ0) - проекция на
Векторная диаграмма
Векторная диаграмма: x = Acos (ωt + φ0) - проекция на
Слайд 8Векторная диаграмма гармонических колебаний (картинка)
Смещение: x = Acos(ω0t + φ0)
Скорость: v =
Векторная диаграмма гармонических колебаний (картинка)
Смещение: x = Acos(ω0t + φ0)
Скорость: v =
Слайд 9Энергия гармонических колебаний
Потенциальная энергия:
П = kx2/2 = ½kA2cos2(ω0t + φ0)
Кинетическая энергия:
K
Энергия гармонических колебаний
Потенциальная энергия:
П = kx2/2 = ½kA2cos2(ω0t + φ0)
Кинетическая энергия:
K
Слайд 10Задача 10.1
Фазовая траектория – эллипс:
x2/A2 + v2/v02 = 1
Задача 10.1. Нарисуйте
Задача 10.1
Фазовая траектория – эллипс:
x2/A2 + v2/v02 = 1
Задача 10.1. Нарисуйте
Слайд 11Период колебаний: энергетический метод для колебательных систем с одной степенью свободы
q –
Период колебаний: энергетический метод для колебательных систем с одной степенью свободы
q –
Слайд 12Математический маятник
Математический маятник – материальная точка на нерастяжимой лёгкой нити в
Математический маятник
Математический маятник – материальная точка на нерастяжимой лёгкой нити в
Слайд 13Задача 10.5
Гантель длины 2ℓ скользит без трения по сферической поверхности радиуса R.
Задача 10.5
Гантель длины 2ℓ скользит без трения по сферической поверхности радиуса R.
Слайд 14Решение
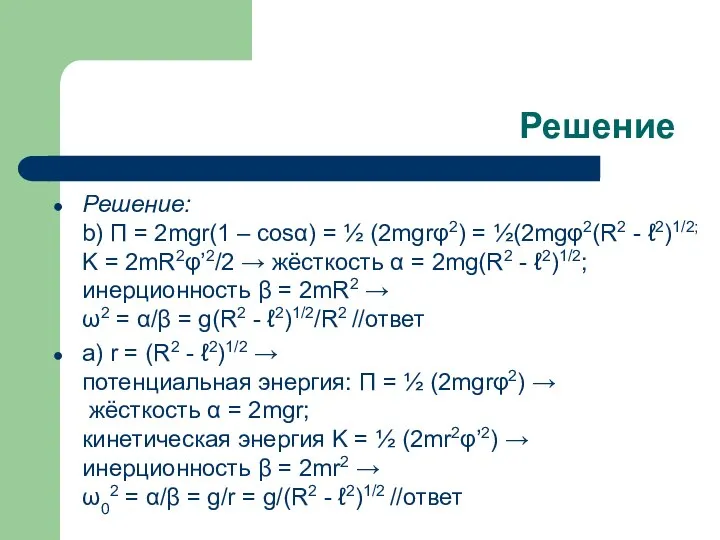
Решение:
b) П = 2mgr(1 – cosα) = ½ (2mgrφ2) = ½(2mgφ2(R2 -
Решение
Решение: b) П = 2mgr(1 – cosα) = ½ (2mgrφ2) = ½(2mgφ2(R2 -
Слайд 15Крутильный маятник
Крутильный маятник

Слайд 16Крутильные колебания
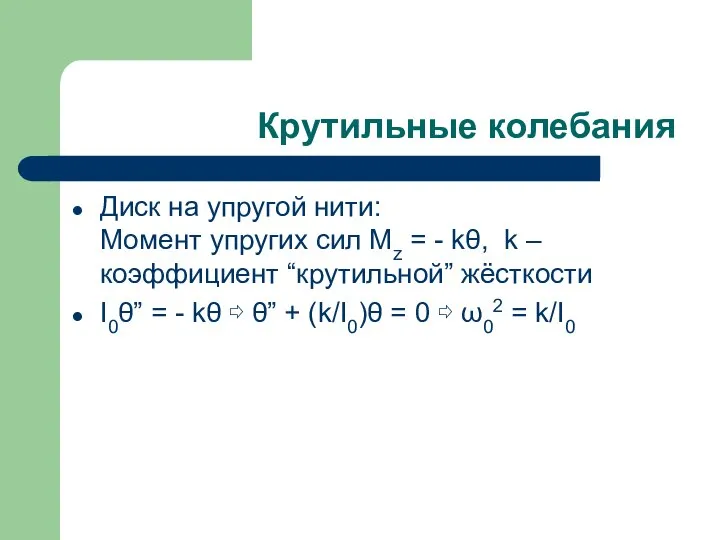
Диск на упругой нити:
Момент упругих сил Mz = - kθ, k
Крутильные колебания
Диск на упругой нити: Момент упругих сил Mz = - kθ, k
Слайд 17Физический маятник
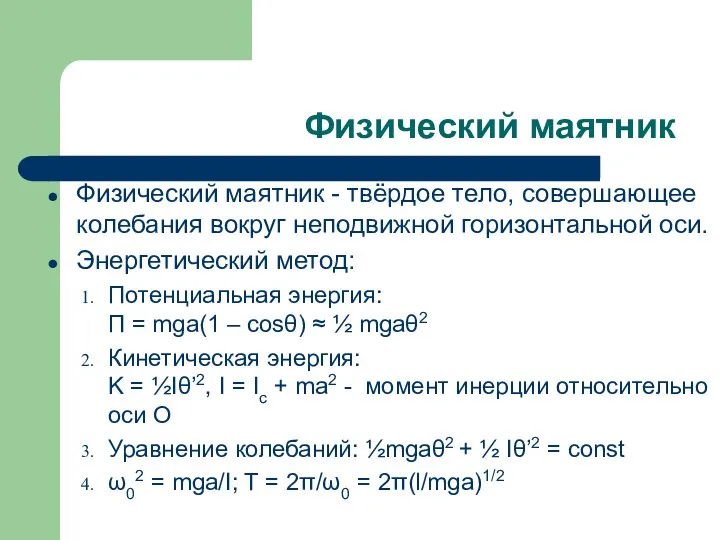
Физический маятник - твёрдое тело, совершающее колебания вокруг неподвижной горизонтальной оси.
Энергетический
Физический маятник
Физический маятник - твёрдое тело, совершающее колебания вокруг неподвижной горизонтальной оси.
Энергетический
Слайд 18Приведённая длина. Центр качания. Теорема Гюйгенса.
Оборотный маятник и измерение g
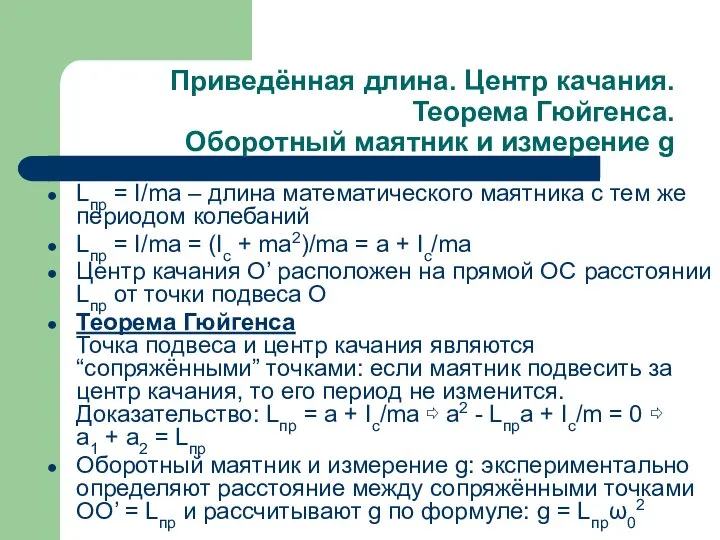
Lпр =
Приведённая длина. Центр качания. Теорема Гюйгенса.
Оборотный маятник и измерение g
Lпр =
Слайд 19Задача 10.3
10.3. Найти период колебаний однородного стержня длины ℓ = 50 см,
Задача 10.3
10.3. Найти период колебаний однородного стержня длины ℓ = 50 см,
Слайд 20Затухающие колебания
Сила вязкого трения Fтр = -βv
mx” = - kx –
Затухающие колебания
Сила вязкого трения Fтр = -βv
mx” = - kx –
Слайд 21Характеристики затухающих колебаний
Время релаксации τ – это время, за которое амплитуда
Характеристики затухающих колебаний
Время релаксации τ – это время, за которое амплитуда
Слайд 22Диссипация энергии. Добротность
dE/dt = -βv2 - мощность силы трения
dE/dt = -βv2 =
Диссипация энергии. Добротность
dE/dt = -βv2 - мощность силы трения
dE/dt = -βv2 =
Слайд 23Задача 10.2
Зная период колебаний T и время уменьшения амплитуды колебаний в 2
Задача 10.2
Зная период колебаний T и время уменьшения амплитуды колебаний в 2
Слайд 24Задача 10.4
Свободные колебания математического маятника массы m, длиной ℓ испытывают затухание из-за
Задача 10.4
Свободные колебания математического маятника массы m, длиной ℓ испытывают затухание из-за
Слайд 25Решение 10.4
A = A0e-γt → ΔA = A0γT → ΔE = kA0ΔA
Решение 10.4
A = A0e-γt → ΔA = A0γT → ΔE = kA0ΔA
Слайд 26Вынужденные колебания. Векторные диаграммы. Резонанс
mx” + βv + kx = Fcosωt ⇨
x”
Вынужденные колебания. Векторные диаграммы. Резонанс
mx” + βv + kx = Fcosωt ⇨
x”
Слайд 27Вынужденные колебания. Векторные диаграммы. Резонанс
Из векторной диаграммы:
амплитуда
B = f/((ω2 – ω02)2 +
Вынужденные колебания. Векторные диаграммы. Резонанс
Из векторной диаграммы:
амплитуда
B = f/((ω2 – ω02)2 +
Слайд 28Резонансная кривая
B = Bmaxγ/((ω – ω0)2 + γ2)1/2
Резонансная кривая
B = Bmaxγ/((ω – ω0)2 + γ2)1/2
Слайд 29Параметрический резонанс
Параметрический резонанс - возбуждение незатухающих колебаний периодическим изменением параметров колебательной системы
Пример:
Параметрический резонанс
Параметрический резонанс - возбуждение незатухающих колебаний периодическим изменением параметров колебательной системы
Пример:
Слайд 30Ангармонический математический маятник
½кθ2 + ½ μθ’2 = const ⇨ θ” + ω02
Ангармонический математический маятник
½кθ2 + ½ μθ’2 = const ⇨ θ” + ω02
Слайд 31Волновое уравнение. Скорость упругих волн в тонком стержне
∂2x/∂t2 = v2 ∂2x/∂z2
общее решение
Волновое уравнение. Скорость упругих волн в тонком стержне
∂2x/∂t2 = v2 ∂2x/∂z2 общее решение
Слайд 32Численные примеры (сталь)
Модуль Юнга: E0 = 2 1011 Н/м2 = 2 Мбар;
Численные примеры (сталь)
Модуль Юнга: E0 = 2 1011 Н/м2 = 2 Мбар;
Слайд 33Численные примеры (алюминий)
Модуль Юнга: E0 = 0,705 1011 Н/м2 = 0,705 Мбар;
Численные примеры (алюминий)
Модуль Юнга: E0 = 0,705 1011 Н/м2 = 0,705 Мбар;
Слайд 34Скорость звука в жидкостях и газах
В газе Δz/z = ΔV/V = Δp/Е
Скорость звука в жидкостях и газах
В газе Δz/z = ΔV/V = Δp/Е
Слайд 35Численные примеры (вода, воздух)
v = (dp/dρ)1/2
Вода:
v = (K/ρ)1/2 K = Vdp/dV -
Численные примеры (вода, воздух)
v = (dp/dρ)1/2
Вода:
v = (K/ρ)1/2 K = Vdp/dV -
Слайд 36Скорость волны в гибком шнуре. Струна
v = (T/ρl)1/2 – скорость распространения упругих
Скорость волны в гибком шнуре. Струна
v = (T/ρl)1/2 – скорость распространения упругих
Слайд 37Энергия упругой волны. Амплитуда давления в звуковой волне.
Плотность кинетическая энергии:
wk =
Энергия упругой волны. Амплитуда давления в звуковой волне.
Плотность кинетическая энергии: wk =
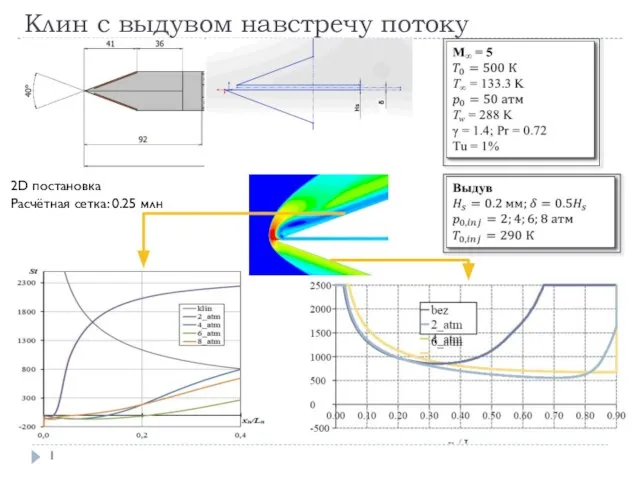 Клин с выдувом навстречу потоку
Клин с выдувом навстречу потоку Движение под углом к горизонту
Движение под углом к горизонту Импульс материальной точки. Другая формулировка второго закона Ньютона
Импульс материальной точки. Другая формулировка второго закона Ньютона Состояние вещества. Тест
Состояние вещества. Тест Амперметр. Измерение силы тока
Амперметр. Измерение силы тока Презентация на тему Конвекция. Излучение
Презентация на тему Конвекция. Излучение  Курс лекций по теоретической механике. Статика
Курс лекций по теоретической механике. Статика Физические свойства соленой воды
Физические свойства соленой воды Игра-КВН Первый урок в 8 классе
Игра-КВН Первый урок в 8 классе Последовательное соединение
Последовательное соединение opredelenie_koordinaty_dvizh_tela
opredelenie_koordinaty_dvizh_tela ФОМНЭ_2022_Лекция № 2
ФОМНЭ_2022_Лекция № 2 Равновесие сил с учётом трения покоя, сцепления
Равновесие сил с учётом трения покоя, сцепления Конструирование экспериментальных заданий по физике с использованием ментальных карт
Конструирование экспериментальных заданий по физике с использованием ментальных карт Сборка, регулировка и испытание охлаждения и смазки двигателей
Сборка, регулировка и испытание охлаждения и смазки двигателей Открытый урок по физике. Основной закон электростатики - закон Кулона
Открытый урок по физике. Основной закон электростатики - закон Кулона Исследование деформаций в тонкостенной цилиндрической оболочке
Исследование деформаций в тонкостенной цилиндрической оболочке Физика вокруг на
Физика вокруг на Постоянные магниты
Постоянные магниты Свойства полупроводниковых диодов
Свойства полупроводниковых диодов Биологическое действие радиоактивных излучений
Биологическое действие радиоактивных излучений Презентация на тему Сила трения скольжения
Презентация на тему Сила трения скольжения  Сила трения
Сила трения Методы расчетов резисторных схем постоянного тока.11 класс
Методы расчетов резисторных схем постоянного тока.11 класс Термодинамика. Подготовка к контрольной работе
Термодинамика. Подготовка к контрольной работе Построение изображений, полученных с помощью линз
Построение изображений, полученных с помощью линз Электроосветительные приборы
Электроосветительные приборы Взаимодействие тел
Взаимодействие тел