- Метод составления уравнений движения гибкого кольца при неголономных ограничениях

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. . К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей динамики механических систем-находит широкое
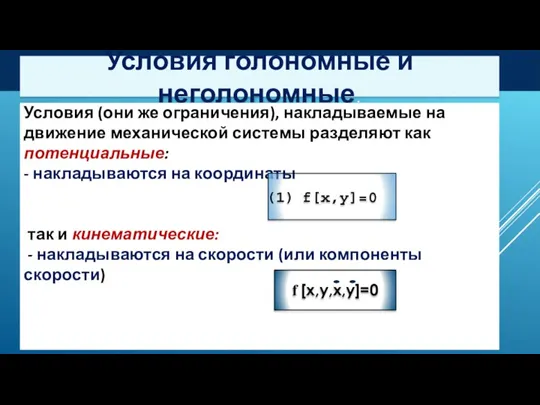
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
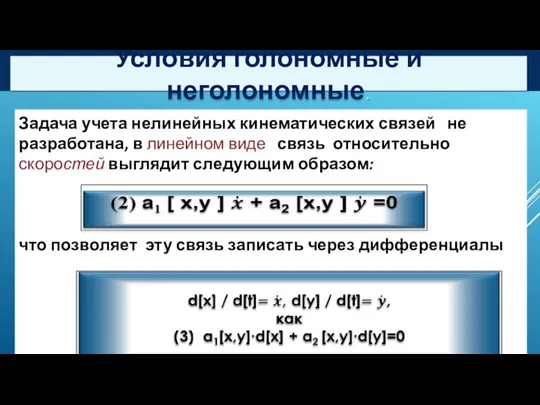
- 6. Условия голономные и неголономные. Задача учета нелинейных кинематических связей не разработана, в линейном виде связь относительно
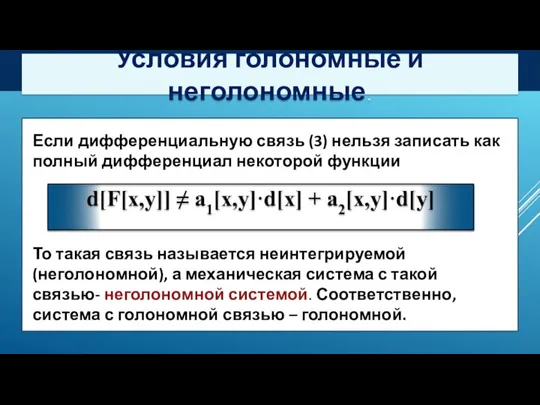
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции То
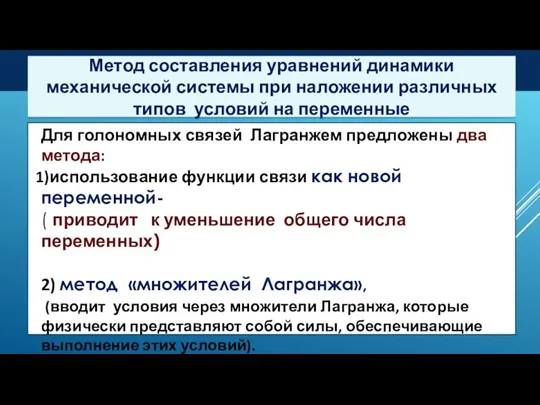
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные Для голономных связей
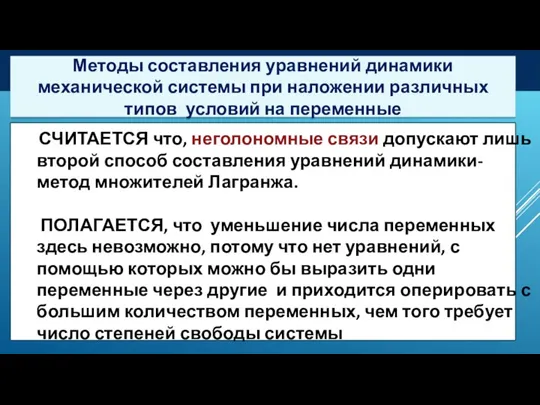
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
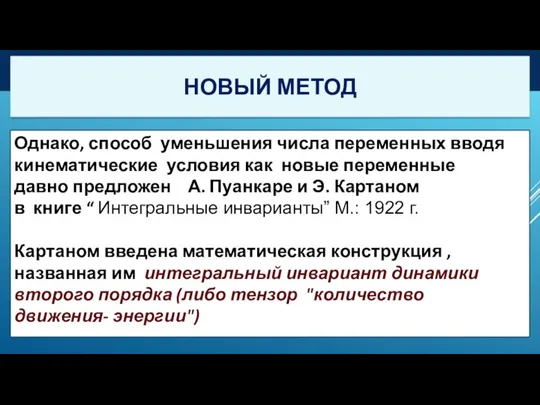
- 10. Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные давно предложен А. Пуанкаре и
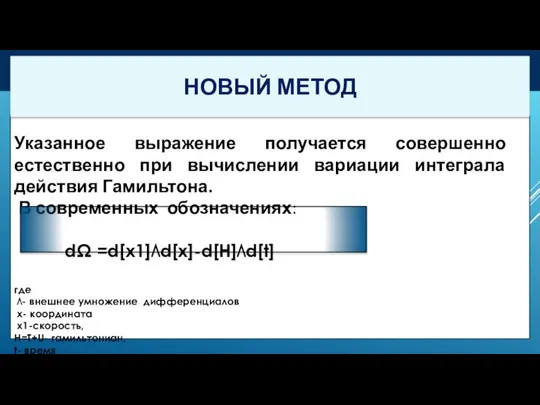
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В случае использования интегрального инварианта механики по Картану, введение ограничений на переменные механической системы (как голономные,
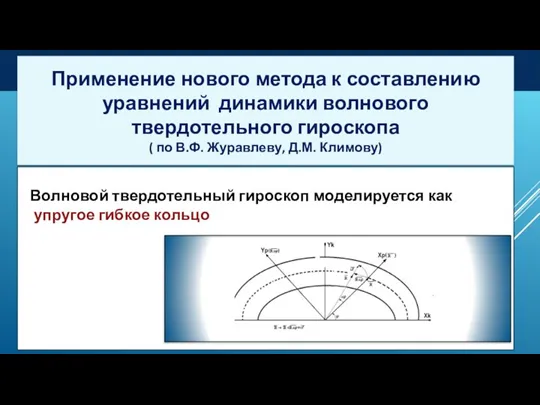
- 14. Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М. Климову)
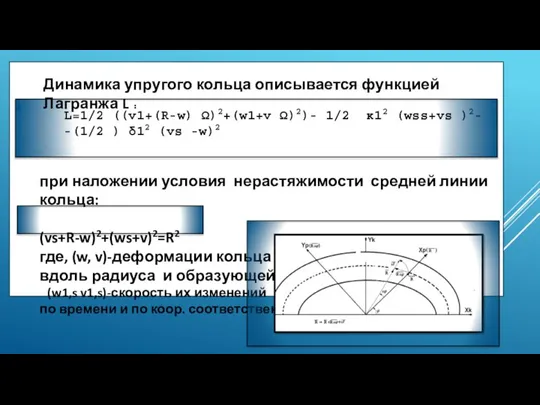
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 при наложении условия
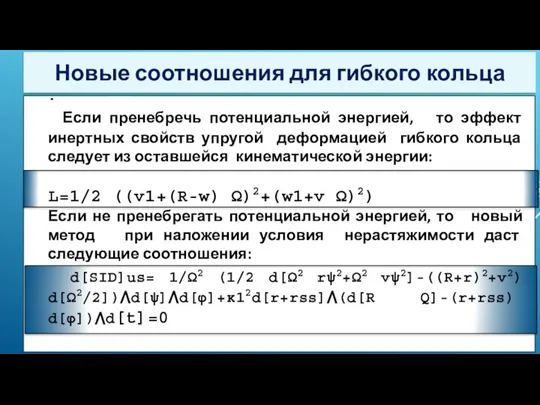
- 16. . Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией гибкого кольца следует из оставшейся
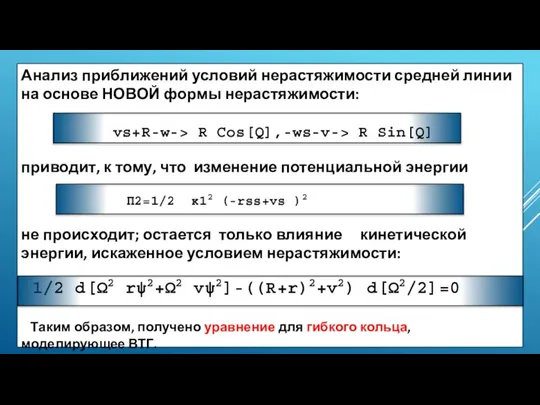
- 17. Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 20. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Картан Э.Д. Интегральные инварианты М.: 1922 г. 2. Суслов Г.К. Теоретическая механика,
- 22. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета нелинейных кинематических связей не разработана, в линейном
Условия голономные и неголономные.
Задача учета нелинейных кинематических связей не разработана, в линейном
Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В случае использования интегрального инварианта механики по Картану, введение ограничений на
В случае использования интегрального инварианта механики по Картану, введение ограничений на
Слайд 14Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
Слайд 17
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1032770/slide-18.jpg)
Слайд 20СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
 Электричество и магнетизм. Лекция № 3
Электричество и магнетизм. Лекция № 3 Плотность вещества. Тела
Плотность вещества. Тела Современная физическая картина мира
Современная физическая картина мира Процессы изменения состояния термодинамических систем
Процессы изменения состояния термодинамических систем Телескопы. История телескопа
Телескопы. История телескопа Создание модели поступательного движения тела
Создание модели поступательного движения тела Энергия и электричество
Энергия и электричество Правило смещения
Правило смещения Классификация магнитных материалов специального назначения. (Лекция 8)
Классификация магнитных материалов специального назначения. (Лекция 8) Презентация на тему Применение законов Ньютона
Презентация на тему Применение законов Ньютона  Распределение Максвелла
Распределение Максвелла Датчики термоанемометров
Датчики термоанемометров Силовая электроника
Силовая электроника ДМА – динамически механический анализ
ДМА – динамически механический анализ 1f712686a0a73c13b3172265a60c76b1
1f712686a0a73c13b3172265a60c76b1 Единицы массы: центнер, тонна
Единицы массы: центнер, тонна Организация проектно-исследовательской деятельности на уроках физики как путь к формированию ключевых компетенций
Организация проектно-исследовательской деятельности на уроках физики как путь к формированию ключевых компетенций Презентация на тему Получение и передача переменного электрического тока
Презентация на тему Получение и передача переменного электрического тока  Приготовьтесь к построению! Урок физики
Приготовьтесь к построению! Урок физики Свойства жидкостей. Поверхностное натяжение
Свойства жидкостей. Поверхностное натяжение Fizika - sila
Fizika - sila Свободные затухающие колебания
Свободные затухающие колебания Указатель уровня топлива
Указатель уровня топлива Механические свойства твердых тел. Деформация. Упругость. Прочность
Механические свойства твердых тел. Деформация. Упругость. Прочность Международная система единиц. Скалярные и векторные физические величины. 7 класс
Международная система единиц. Скалярные и векторные физические величины. 7 класс Поляризация диэлектриков
Поляризация диэлектриков Методика контроля усилителя 21901-1602060-01 на калибре ПК-009. Педаль тормоза
Методика контроля усилителя 21901-1602060-01 на калибре ПК-009. Педаль тормоза