- Метод составления уравнений неголономной механики в задаче волнового твердотельного гироскопа

Содержание
- 2. Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический формализм, созданный трудами Л.
- 3. Только в 1894 г. в книге «Принципы механики, изложенные в новой связи» (через 106 лет после
- 4. . К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей динамики механических систем-находит широкое
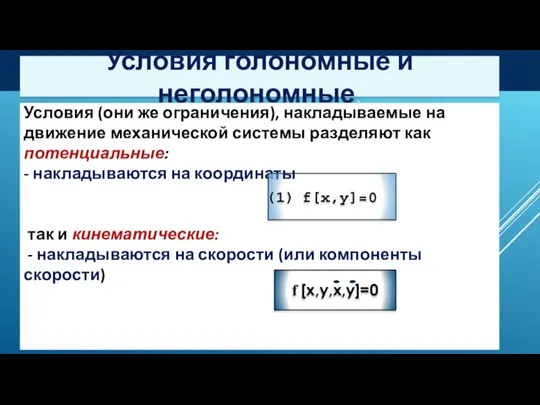
- 5. Условия голономные и неголономные. Условия (они же ограничения), накладываемые на движение механической системы разделяют как потенциальные:
- 6. Условия голономные и неголономные. Задача учета кинематических связей в нелинейном виде не разработана, в линейном виде
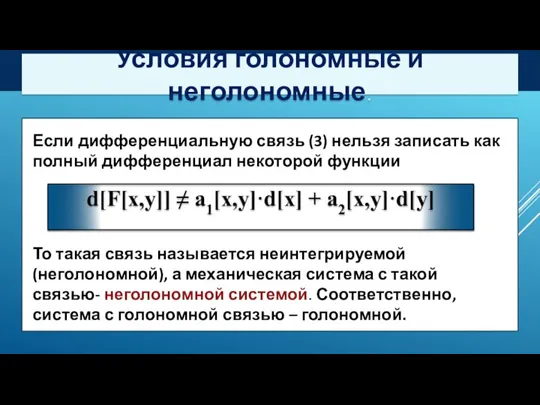
- 7. Условия голономные и неголономные. Если дифференциальную связь (3) нельзя записать как полный дифференциал некоторой функции То
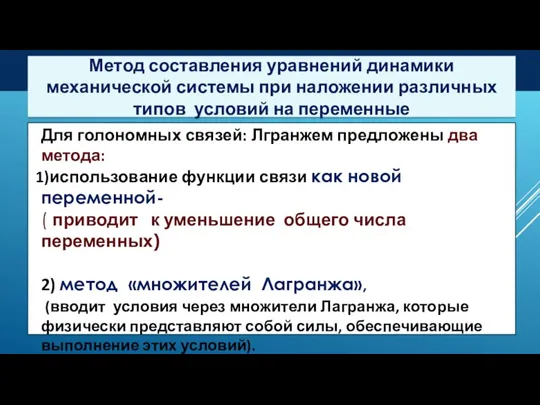
- 8. Метод составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
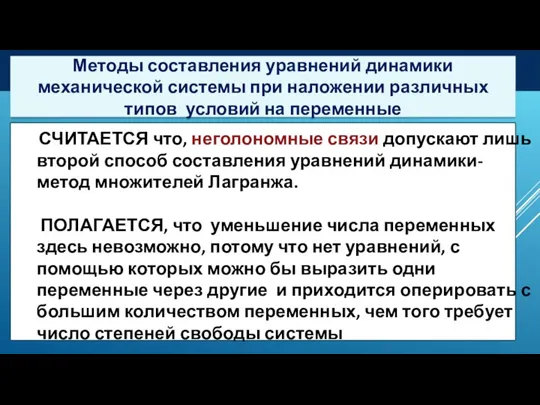
- 9. Методы составления уравнений динамики механической системы при наложении различных типов условий на переменные (2) а1 [
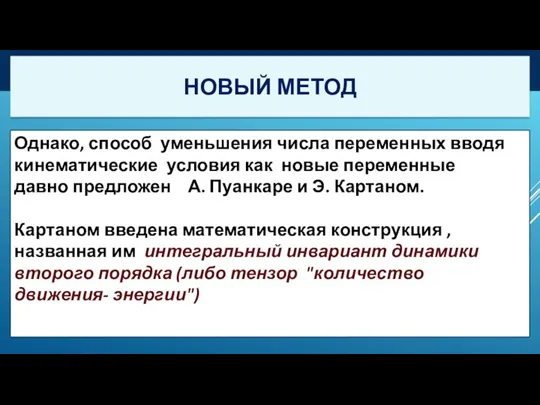
- 10. Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные давно предложен А. Пуанкаре и
- 11. Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона. В современных обозначениях: dΩ =d[x1]⋀d[x]-d[H]⋀d[t]
- 12. НОВЫЙ МЕТОД Поскольку из этого дифференциального инварианта следует система уравнений движения - любой механической системы, а
- 13. В случае использования интегрального инварианта механики по Картану, введение ограничений на переменные механической системы (как голономные,
- 14. Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа ( по В.Ф. Журавлеву, Д.М. Климову)
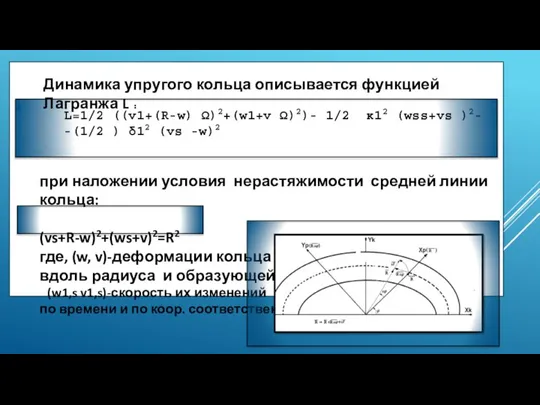
- 15. L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2- -(1/2 ) δ12 (vs -w)2 при наложении условия
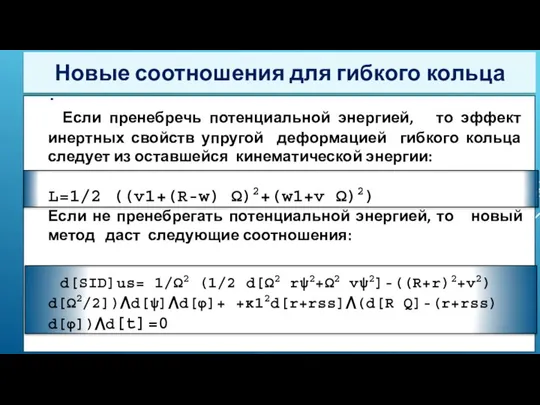
- 16. . Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией гибкого кольца следует из оставшейся
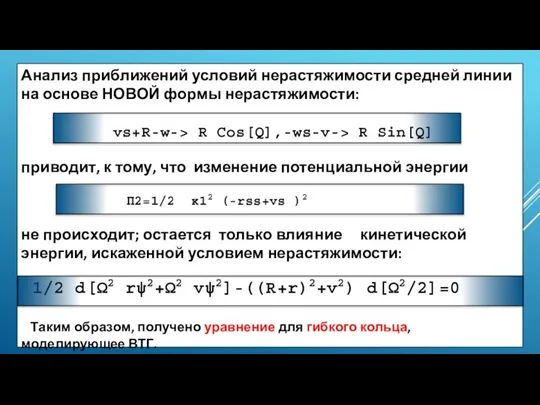
- 17. Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости: vs+R-w-> R Cos[Q],-ws-v-> R Sin[Q]
- 18. Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и в случае когда потенциальной
- 19. Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2) d[Ω2/2]=0 или ((R+r)2+v2) d[Ω2/2]=1/2
- 20. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Картан Э.Д. Интегральные инварианты М.: 1922 г. 2. Суслов Г.К. Теоретическая механика,
- 22. Скачать презентацию
Слайд 2Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Зарождение динамики неголономных систем, по-видимому, следует отнести к тому времени, когда аналитический
Слайд 3Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Только в 1894 г.
в книге «Принципы механики, изложенные в новой связи»
(через 106
Слайд 4.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
.
К настоящему времени динамика неголономных систем оформлена как самостоятельная часть общей
Слайд 5Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Условия голономные и неголономные.
Условия (они же ограничения), накладываемые на движение механической системы
Слайд 6Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,
Условия голономные и неголономные.
Задача учета кинематических связей в нелинейном виде не разработана,

Слайд 7Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Условия голономные и неголономные.
Если дифференциальную связь (3) нельзя записать как полный дифференциал
Слайд 8Метод составления уравнений динамики механической системы при наложении различных типов условий на
Метод составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 9Методы составления уравнений динамики механической системы при наложении различных типов условий на
Методы составления уравнений динамики механической системы при наложении различных типов условий на
Слайд 10
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Однако, способ уменьшения числа переменных вводя кинематические условия как новые переменные
Слайд 11
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Указанное выражение получается совершенно естественно при вычислении вариации интеграла действия Гамильтона.
Слайд 12НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
НОВЫЙ МЕТОД
Поскольку из этого дифференциального инварианта следует система уравнений движения -
Слайд 13
В случае использования интегрального инварианта механики по Картану, введение ограничений на
В случае использования интегрального инварианта механики по Картану, введение ограничений на
Слайд 14Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по
Применение нового метода к составлению уравнений динамики волнового твердотельного гироскопа
( по

Слайд 15
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
L=1/2 ((v1+(R-w) Ω)2+(w1+v Ω)2)- 1/2 κ12 (wss+vs )2-
-(1/2 )
Слайд 16
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
.
Если пренебречь потенциальной энергией, то эффект инертных свойств упругой деформацией
Слайд 17
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Анализ приближений условий нерастяжимости средней линии на основе НОВОЙ формы нерастяжимости:
Слайд 18Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Эффект инертных свойств упругой деформацией гибкого кольца следует из уравнений кольца и
Слайд 19Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
Уравнение динамики для переменных гибкого кольца эквивалентно :
1/2 d[Ω2 rψ2+Ω2
![Уравнение динамики для переменных гибкого кольца эквивалентно : 1/2 d[Ω2 rψ2+Ω2 vψ2]-((R+r)2+v2)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1067866/slide-18.jpg)
Слайд 20СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Картан Э.Д. Интегральные инварианты М.: 1922 г.
2. Суслов Г.К. Теоретическая
 Энергия - основа мироздания. Солнечные батареи
Энергия - основа мироздания. Солнечные батареи Нанотехнологии и наноматериалы
Нанотехнологии и наноматериалы Свойства волн. Тест 11
Свойства волн. Тест 11 Презентация на тему Работа электрического тока
Презентация на тему Работа электрического тока  Дефлектор
Дефлектор Специальные заклепки
Специальные заклепки Измерительные приборы
Измерительные приборы Интерференция света
Интерференция света Электрическое напряжение. Вольтметр. Измерение напряжения
Электрическое напряжение. Вольтметр. Измерение напряжения Технический анализ. Виды графиков
Технический анализ. Виды графиков Глаз. Особенности зрения человека
Глаз. Особенности зрения человека Наука на переменках. Тест
Наука на переменках. Тест Магнитные свойства вещества. Сила Лоренца
Магнитные свойства вещества. Сила Лоренца Плотность вещества
Плотность вещества Специальная теория относительности
Специальная теория относительности Виртуальный лабораторный комплекс по Молекулярной физике, Теплоте и Основам Термодинамики
Виртуальный лабораторный комплекс по Молекулярной физике, Теплоте и Основам Термодинамики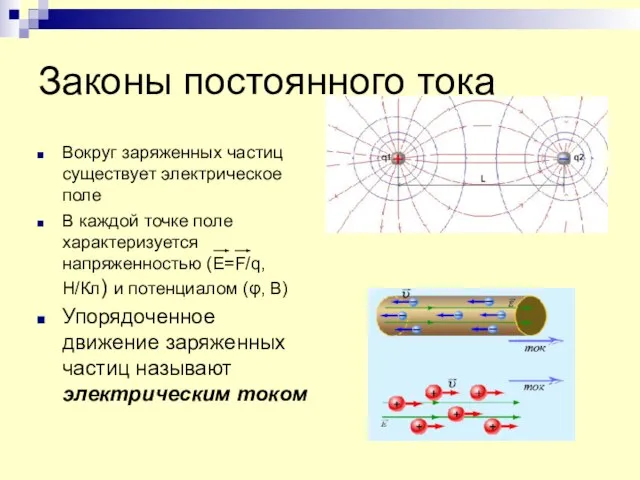 Законы постоянного тока
Законы постоянного тока Вибрации и колебания
Вибрации и колебания Физика. Тест 1-15
Физика. Тест 1-15 Основы электроники
Основы электроники Теория пластин
Теория пластин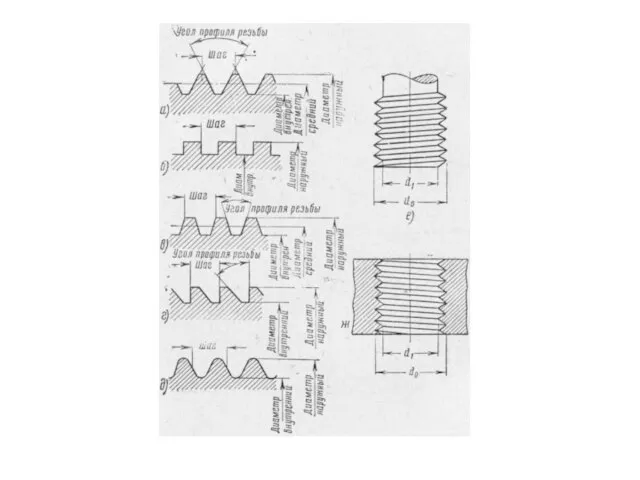 Технология обработки на металлорежущих станках. Элементы резьбы
Технология обработки на металлорежущих станках. Элементы резьбы Центр тяжести
Центр тяжести Презентация на тему Магнитные свойства вещества
Презентация на тему Магнитные свойства вещества  Электрический ток. Источники тока
Электрический ток. Источники тока Как определить массу тела?
Как определить массу тела? Квантовая механика
Квантовая механика Параллельное соединение проводников
Параллельное соединение проводников