- Непрерывные модели

Содержание
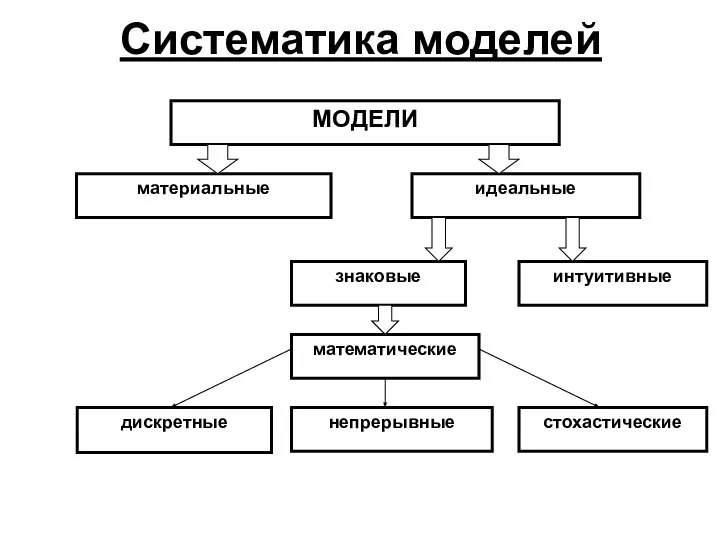
- 2. Систематика моделей МОДЕЛИ материальные идеальные знаковые интуитивные математические дискретные непрерывные стохастические
- 3. Характеристика моделей: Материальные модели – это модели, для работы с которыми необходим эксперимент. Знаковые модели –
- 4. Процесс моделирования: 1. Определение цели моделирования (что дано и что требуется найти). 2. Определение факторов, которые
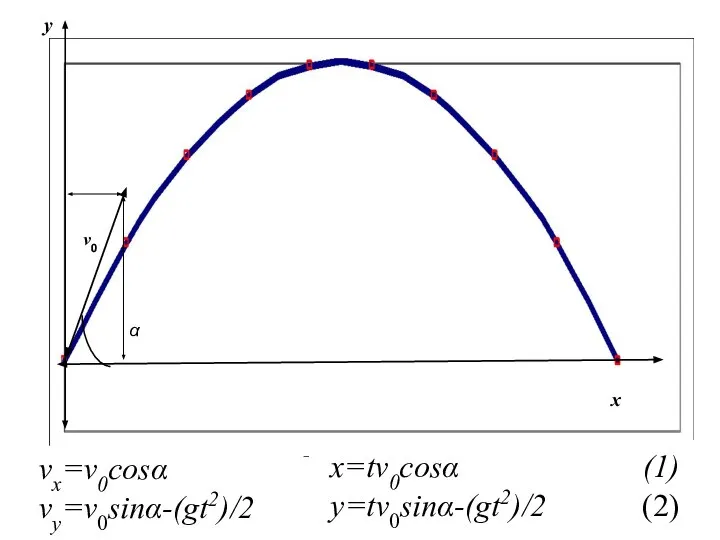
- 5. Задача баллистики. Задача: из катапульты бросают камень с начальной скоростью v0 под углом α к горизонту.
- 6. x y α v0 vx=v0cosα vy=v0sinα-(gt2)/2 x=tv0cosα (1) y=tv0sinα-(gt2)/2 (2)
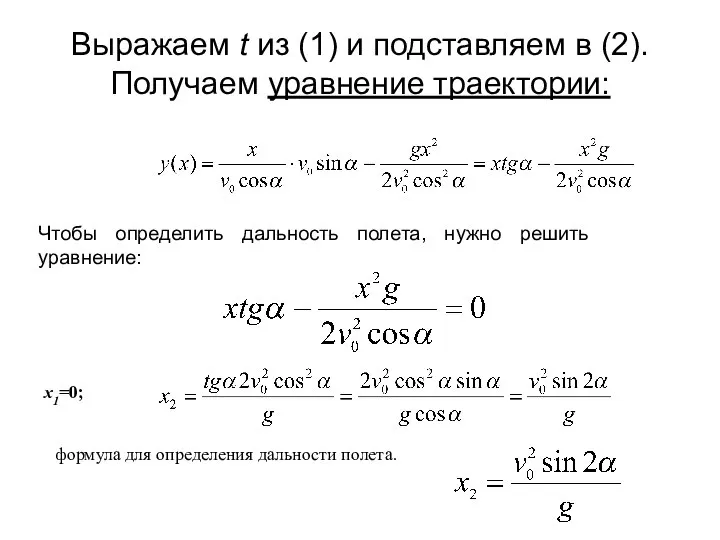
- 7. Выражаем t из (1) и подставляем в (2). Получаем уравнение траектории: Чтобы определить дальность полета, нужно
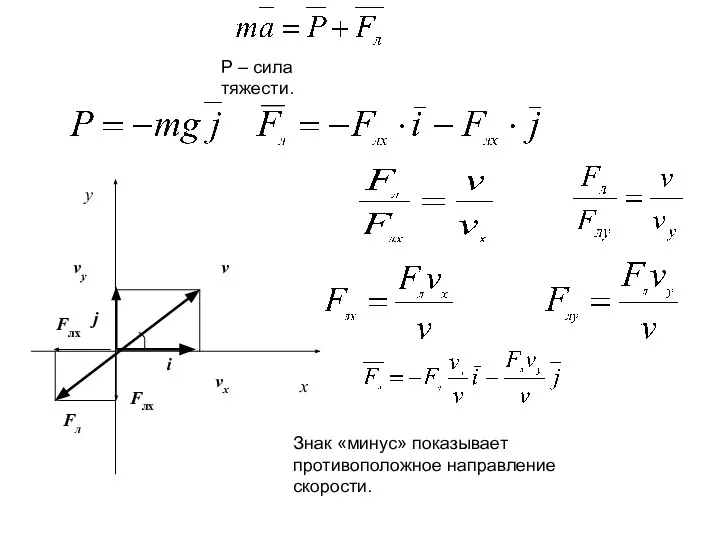
- 8. Задача баллистики с учетом силы сопротивления воздуха. Из предположений модели исключаем предположение №4. Предположения модели: 1.
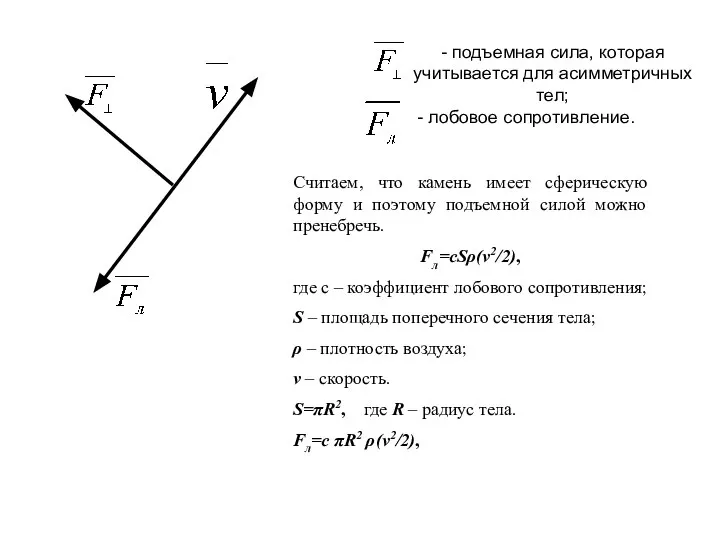
- 9. - подъемная сила, которая учитывается для асимметричных тел; - лобовое сопротивление. Считаем, что камень имеет сферическую
- 10. Знак «минус» показывает противоположное направление скорости. i j x y v Fл Fлx Fлx vy vx
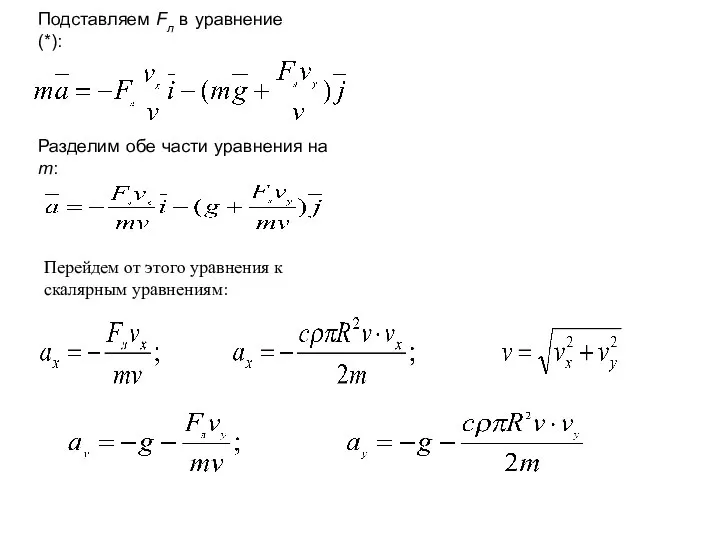
- 11. Подставляем Fл в уравнение (*): Разделим обе части уравнения на m: Перейдем от этого уравнения к
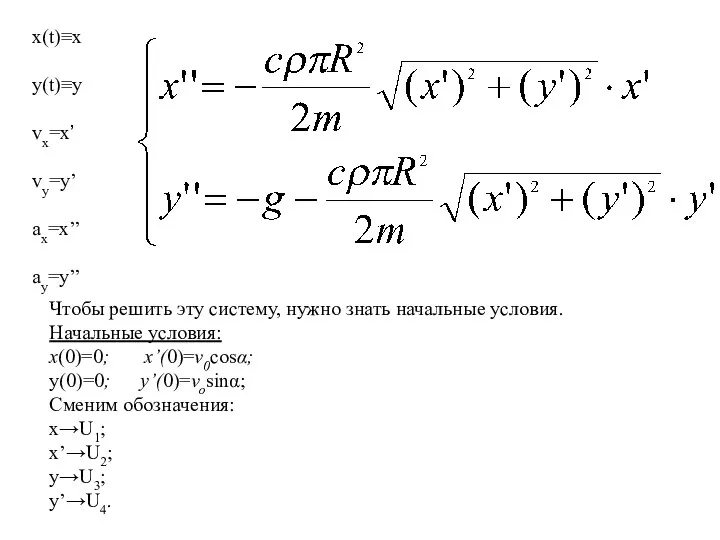
- 12. x(t)≡x y(t)≡y vx=x’ vy=y’ ax=x’’ ay=y’’ Чтобы решить эту систему, нужно знать начальные условия. Начальные условия:
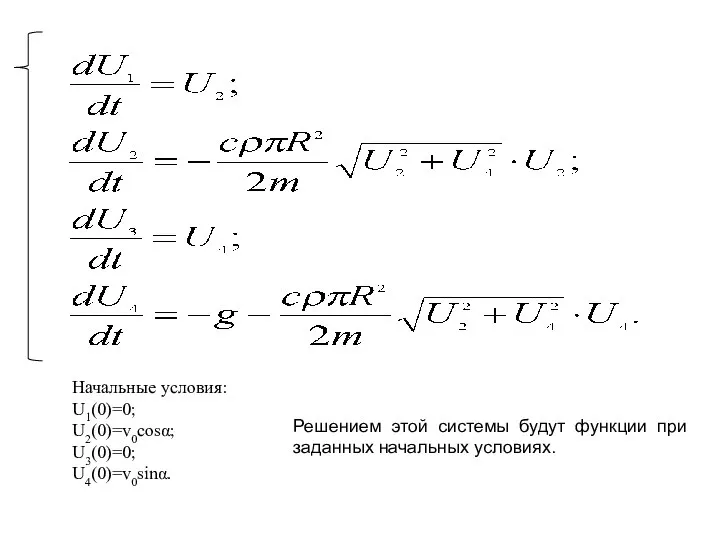
- 13. Начальные условия: U1(0)=0; U2(0)=v0cosα; U3(0)=0; U4(0)=v0sinα. Решением этой системы будут функции при заданных начальных условиях.
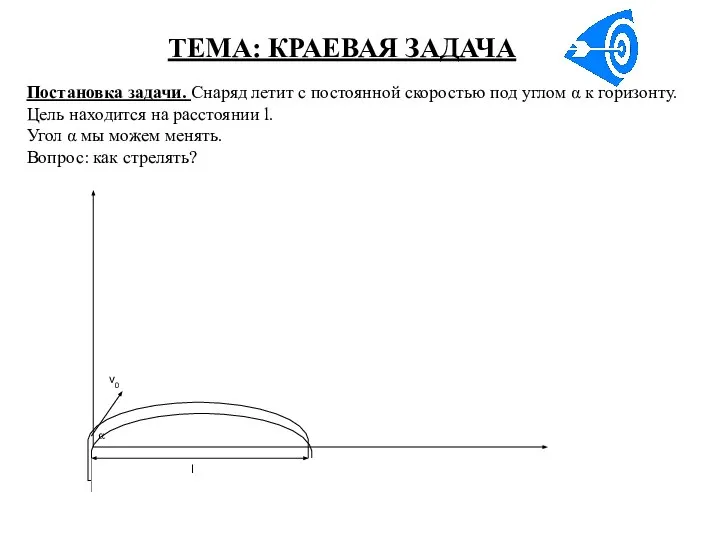
- 15. ТЕМА: КРАЕВАЯ ЗАДАЧА Постановка задачи. Снаряд летит с постоянной скоростью под углом α к горизонту. Цель
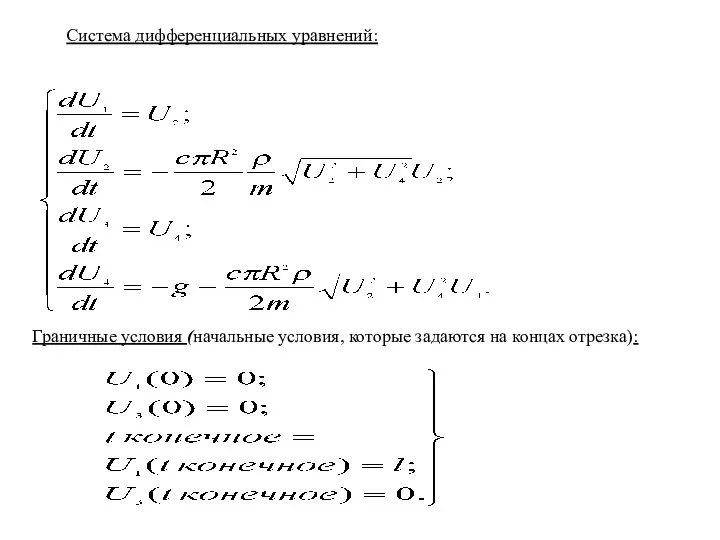
- 16. Система дифференциальных уравнений: Граничные условия (начальные условия, которые задаются на концах отрезка):
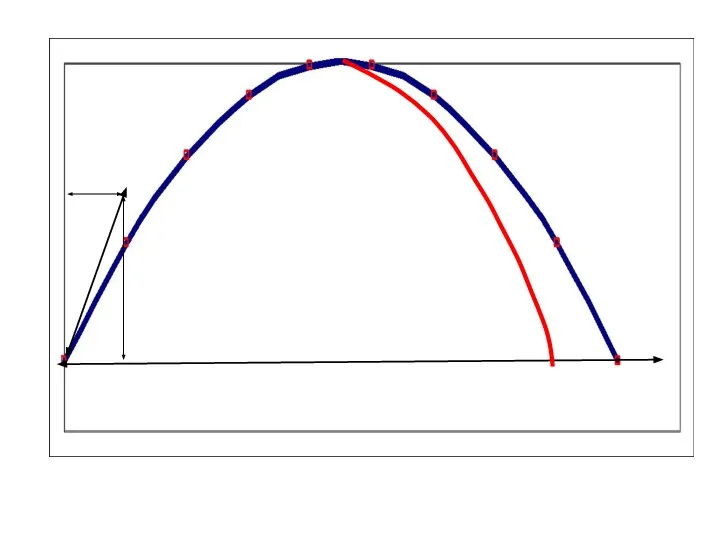
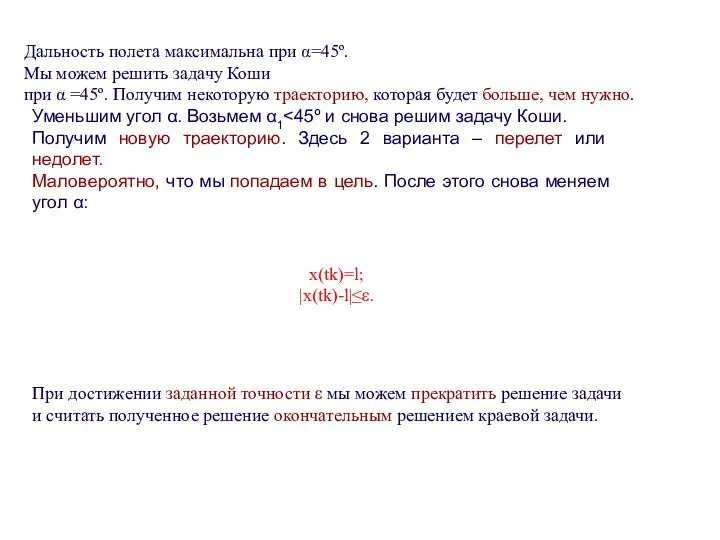
- 17. Дальность полета максимальна при α=45º. Мы можем решить задачу Коши при α =45º. Получим некоторую траекторию,
- 18. α=45º решаем задачу Коши перелет (траектория больше, чем нужно) уменьшаем угол α α1 решаем задачу Коши
- 19. где: где — вектор начальных условий, а — вектор правых частей. — вектор, содержащий решение, Задача
- 20. Задача Коши для системы нормальных дифференциальных уравнений РЕШЕНИЕ ЗАДАЧИ ? КАК ЭТО СДЕЛАТЬ В MATHCAD? Функция
- 21. Функция rkfixed( , a, b, n, F) решает задачу Коши методом Рунге—Кутты с постоянным шагом. –
- 22. Пример. Решить систему дифференциальных уравнений на отрезке [0,3] с шагом 0.1, построить графики найденных функций. Решение
- 24. В этой модели учитывается один показатель: количество публикаций в данный момент. х(t)≡х; ПРЕДПОЛОЖЕНИЕ: скорость роста количества
- 25. Запишем дифференциальное уравнение: Решением уравнения такого вида является функция вида еt; et→∞; t→∞. ! Такую модель
- 26. Модель численности популяций. N(t) – численность популяции в момент времени t. Скорость v роста популяции прямо
- 27. Пример 3. Модель гонки вооружений Ричардсона. x(t)≡x – расходы на вооружение «зеленых»; y(t)≡y – расходы на
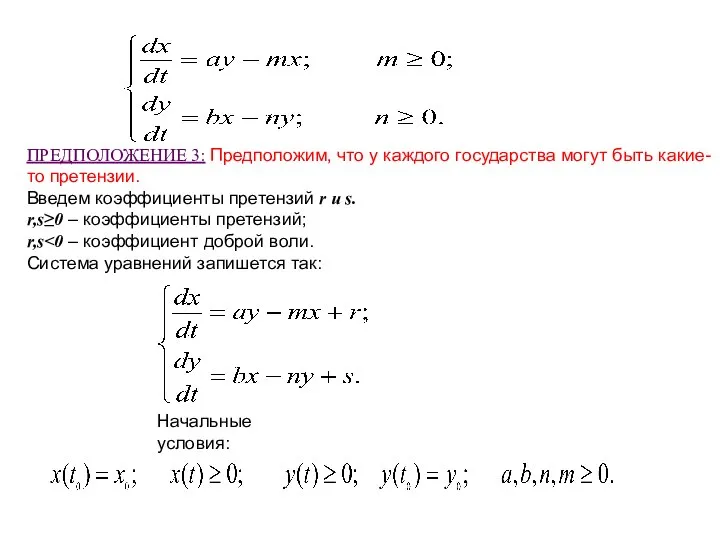
- 28. ПРЕДПОЛОЖЕНИЕ 3: Предположим, что у каждого государства могут быть какие-то претензии. Введем коэффициенты претензий r и
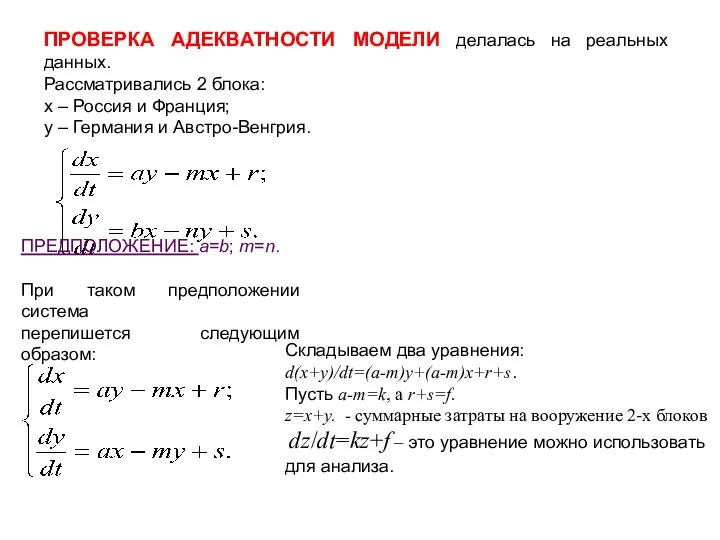
- 29. КОГДА ДОСТИГАЕТСЯ РАВНОВЕСИЕ? Точка равновесия достигается при следующем условии: x=(a/m)y+(r/m); x=(n/b)y-s/b; (a/m)y+r/m= (n/b)y-s/b; y(a/m-n/b)=-s/b-r/m.
- 30. Точка, в которой достигается равновесие, имеет следующие координаты: Каждая точка этой координатной плоскости характеризуется: 1. Координатами
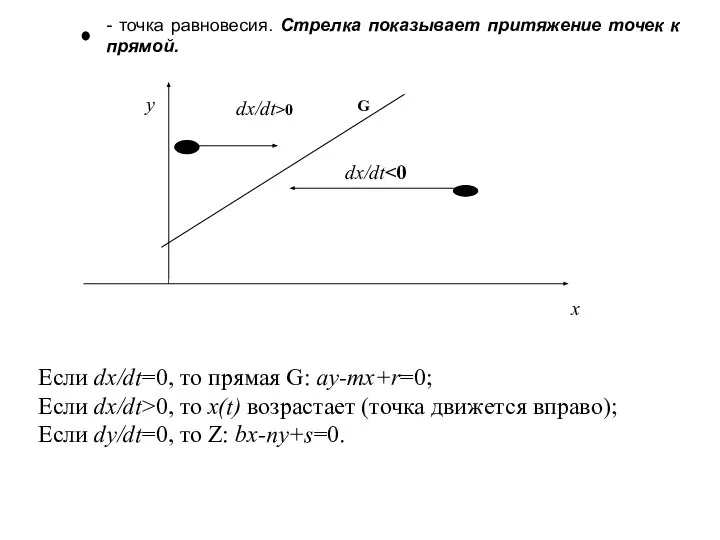
- 31. - точка равновесия. Стрелка показывает притяжение точек к прямой. Если dx/dt=0, то прямая G: ay-mx+r=0; Если
- 32. х y
- 33. Исследуем поведение системы в зависимости от начальных условий. В зависимости от коэффициентов m, n, r, s
- 34. Вариант 2. mn-ab>0; r, s x(t), y(t)≥0. Точка равновесия не достижима ни при каких начальных условиях.
- 35. Вариант 3. mn-ab В областях 1 и 2 есть стремление к положению равновесия. В области 3
- 36. ПРОВЕРКА АДЕКВАТНОСТИ МОДЕЛИ делалась на реальных данных. Рассматривались 2 блока: х – Россия и Франция; у
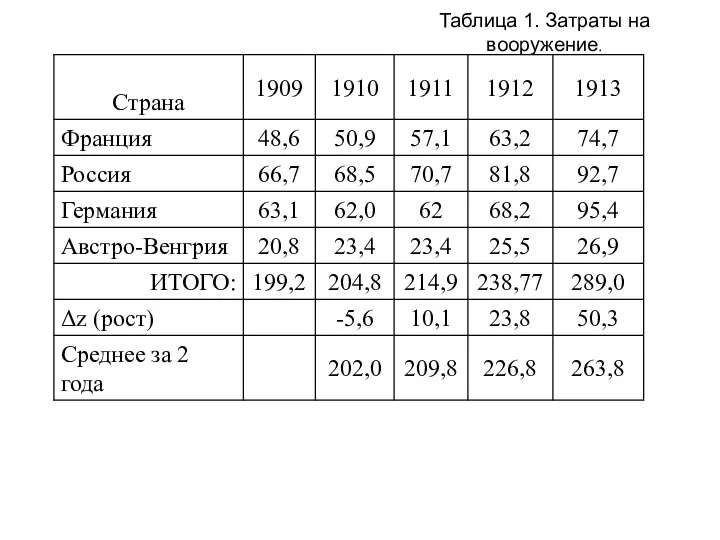
- 37. Таблица 1. Затраты на вооружение.
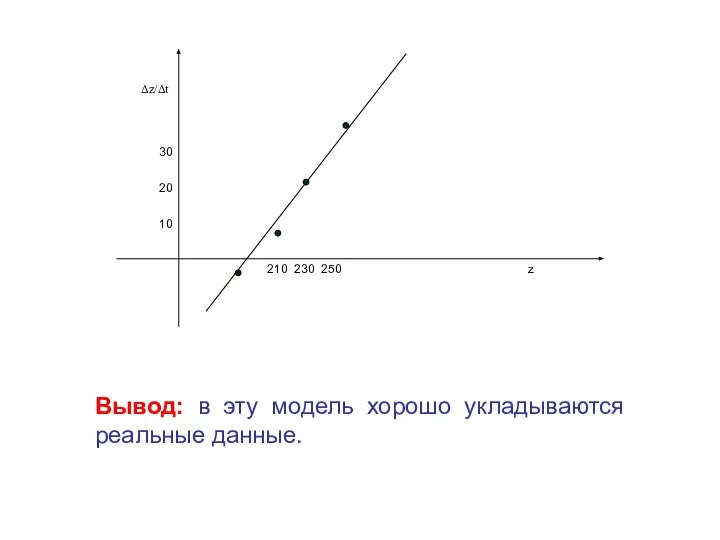
- 38. Δz/Δt z 10 230 250 210 20 30 Вывод: в эту модель хорошо укладываются реальные данные.
- 39. Моделирование прогиба балки
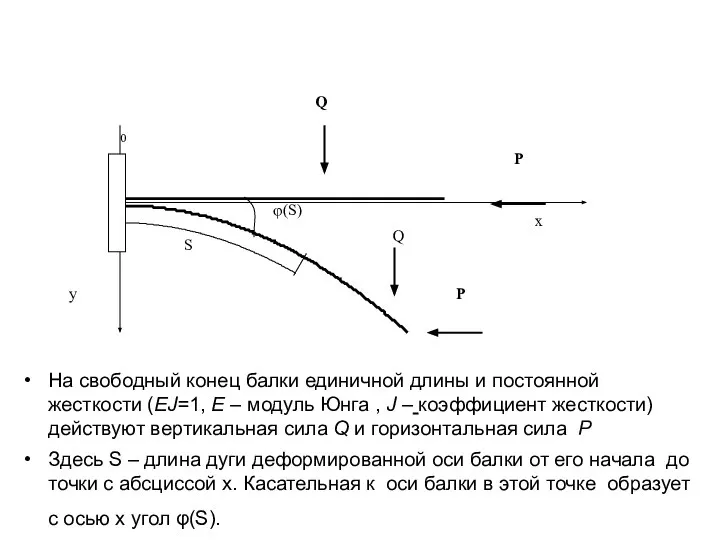
- 40. На свободный конец балки единичной длины и постоянной жесткости (ЕJ=1, Е – модуль Юнга , J
- 41. Прогиб балки описывается нелинейным дифференциальным уравнением : с граничными условиями: . с граничными условиями: .
- 42. Если известно φ(S), то декартовы координаты точек изогнутой оси балки можно определить из следующих соображений: малому
- 43. Решение задачи КОШИ для обыкновенного дифференциального уравнения odesolve(x,b,step), Обращение к функции имеет вид y:=odesolve(x,b) или y:=odesolve(x,b,step),
- 44. Решение в Mathcad
- 45. Применение метода конечных разностей дифференциальная задача сводится к решению системы алгебраических уравнений. Длина балки разбивается на
- 46. При для аппроксимации производной требуется значение угла φn+1 в несуществующем узле с номером n+1. Оно определяется
- 47. При малых прогибах балки можно считать и решать систему линейных уравнений относительно .
- 48. Решение уравнений в частных производных Уравнения в частных производных используются при моделировании разнообразных физических процессов: задачи
- 49. Общий вид дифференциального уравнения 2–го порядка с двумя независимыми переменными: где u≡u(x,y), неизвестная функция, х и
- 50. ТИПЫ уравнений в частных производных Тип уравнения определяется по виду коэффициентов и соотношениям между ними. Обычно
- 51. Рассмотрим дифференциальное уравнение в частных производных первого порядка: , u(t,x) – неизвестная функция двух независимых переменных
- 52. Уравнение Пуассона Это уравнение эллиптического типа, которое можно решить в Mathcad с помощью встроенной функции Уравнение
- 53. Функция multigrid (f, r) имеет два аргумента: f – имя матрицы, задающей правую часть уравнения; r
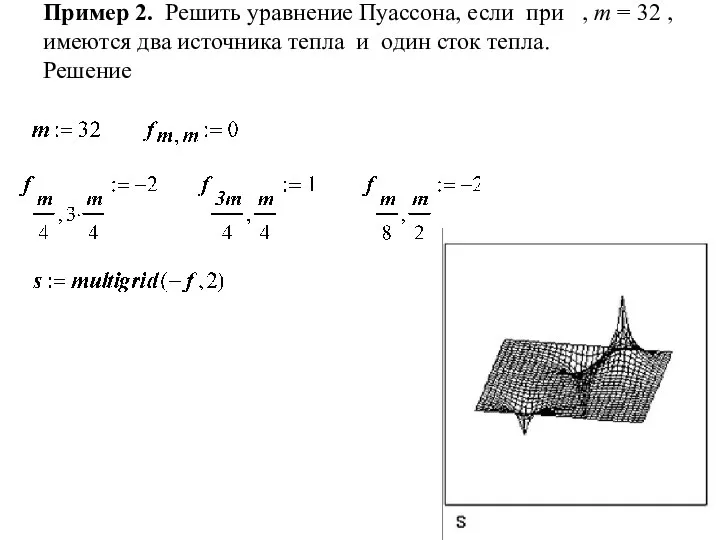
- 54. Пример 2. Решить уравнение Пуассона, если при , m = 32 , имеются два источника тепла
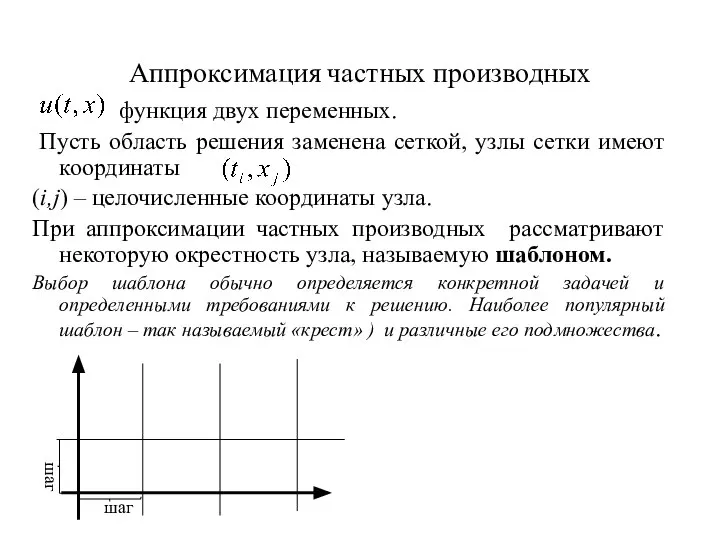
- 55. Аппроксимация частных производных функция двух переменных. Пусть область решения заменена сеткой, узлы сетки имеют координаты (i,j)
- 56. Шаблон «крест» Шаг по переменной t равен τ. по переменной x шаг равен h
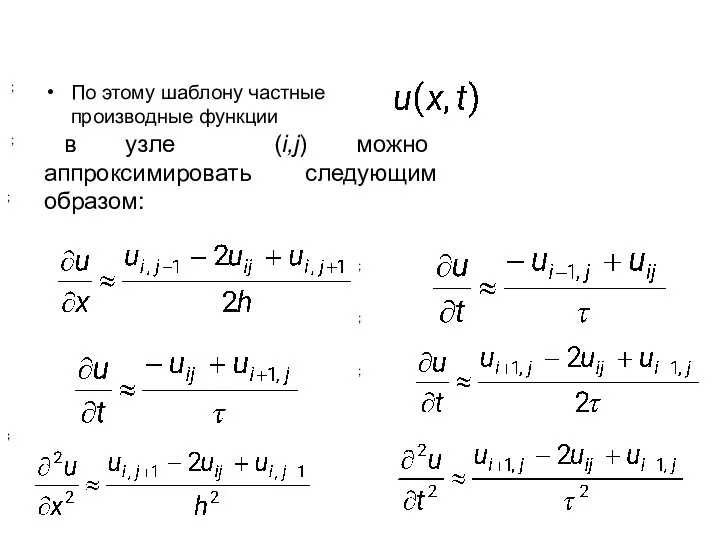
- 57. По этому шаблону частные производные функции в узле (i,j) можно аппроксимировать следующим образом: ; ; ;
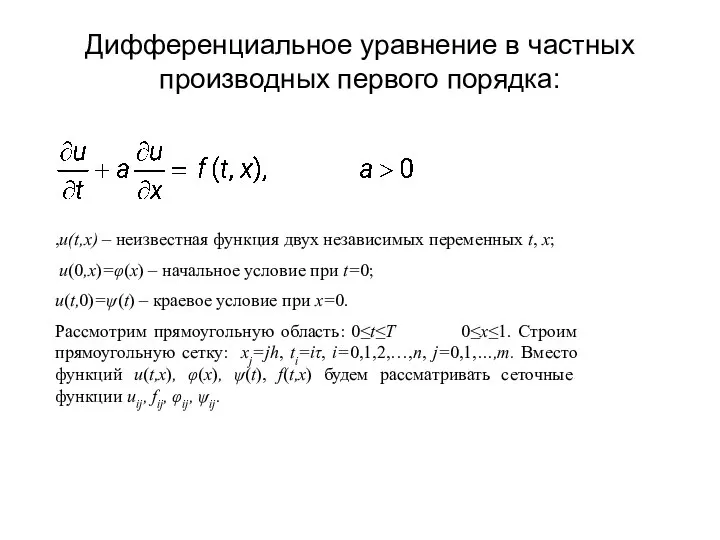
- 58. Дифференциальное уравнение в частных производных первого порядка: ,u(t,x) – неизвестная функция двух независимых переменных t, x;
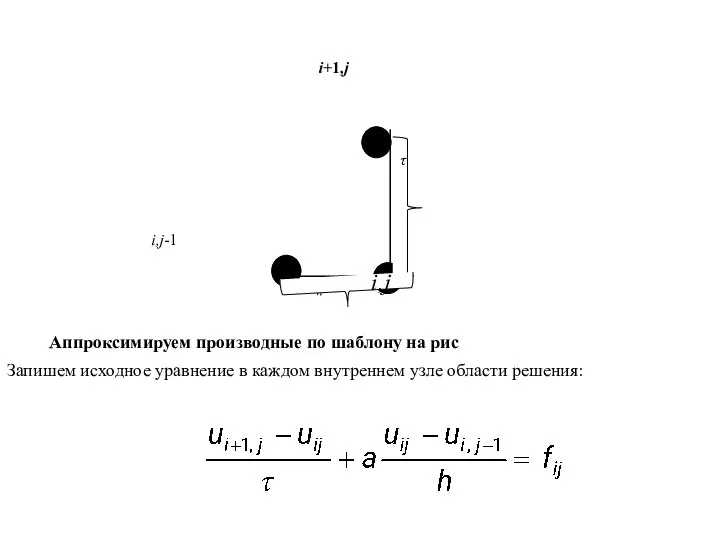
- 59. Аппроксимируем производные по шаблону на рис Запишем исходное уравнение в каждом внутреннем узле области решения:
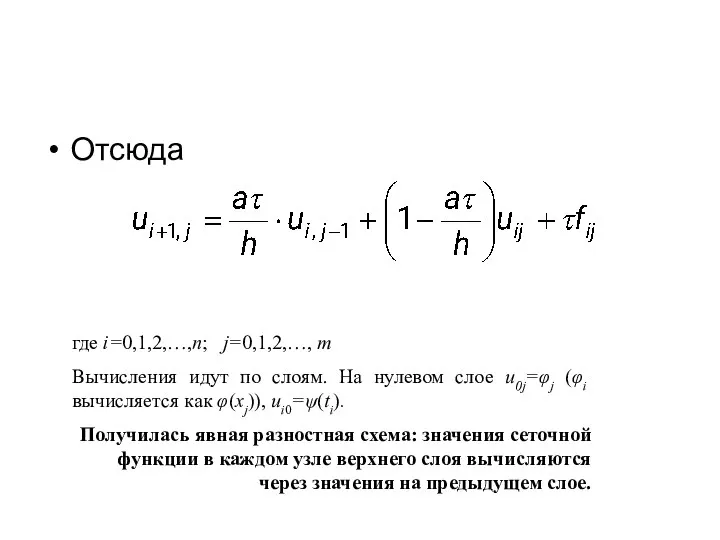
- 60. Отсюда где i=0,1,2,…,n; j=0,1,2,…, m Вычисления идут по слоям. На нулевом слое u0j=φj (φi вычисляется как
- 61. Схема устойчива при 0≤τ≤h/a, при этом u(t,x), φ(х), ψ(t) должны быть дважды непрерывно дифференцируемы; f(х,t) имеет
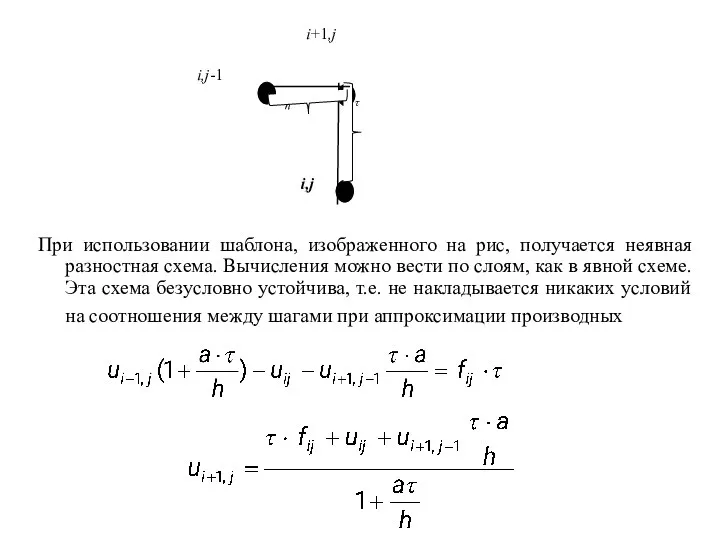
- 62. При использовании шаблона, изображенного на рис, получается неявная разностная схема. Вычисления можно вести по слоям, как
- 63. Пример.
- 64. Уравнение колебания струны Рассмотрим одномерное волновое уравнение, которое описывает, например, свободное колебание струны из исходного неравновесного
- 65. x u
- 67. Скачать презентацию
Слайд 2Систематика моделей
МОДЕЛИ
материальные
идеальные
знаковые
интуитивные
математические
дискретные
непрерывные
стохастические
Систематика моделей
МОДЕЛИ
материальные
идеальные
знаковые
интуитивные
математические
дискретные
непрерывные
стохастические
Слайд 3Характеристика моделей:
Материальные модели – это модели, для работы с которыми необходим
Характеристика моделей: Материальные модели – это модели, для работы с которыми необходим
Слайд 4Процесс моделирования:
1. Определение цели моделирования (что дано и что требуется найти).
2. Определение
Процесс моделирования:
1. Определение цели моделирования (что дано и что требуется найти).
2. Определение
Слайд 5Задача баллистики.
Задача: из катапульты бросают камень с начальной скоростью v0 под углом
Задача баллистики.
Задача: из катапульты бросают камень с начальной скоростью v0 под углом
Слайд 6x
y
α
v0
vx=v0cosα vy=v0sinα-(gt2)/2
x=tv0cosα (1)
y=tv0sinα-(gt2)/2 (2)
x
y
α
v0
vx=v0cosα vy=v0sinα-(gt2)/2
x=tv0cosα (1)
y=tv0sinα-(gt2)/2 (2)
Слайд 7Выражаем t из (1) и подставляем в (2). Получаем уравнение траектории:
Чтобы определить
Выражаем t из (1) и подставляем в (2). Получаем уравнение траектории:
Чтобы определить
Слайд 8Задача баллистики с учетом силы сопротивления воздуха.
Из предположений модели исключаем предположение №4.
Предположения
Задача баллистики с учетом силы сопротивления воздуха.
Из предположений модели исключаем предположение №4.
Предположения
Слайд 9- подъемная сила, которая учитывается для асимметричных тел;
- лобовое сопротивление.
Считаем, что
- подъемная сила, которая учитывается для асимметричных тел;
- лобовое сопротивление.
Считаем, что
Слайд 10Знак «минус» показывает противоположное направление скорости.
i
j
x
y
v
Fл
Fлx
Fлx
vy
vx
Знак «минус» показывает противоположное направление скорости.
i
j
x
y
v
Fл
Fлx
Fлx
vy
vx
Слайд 11Подставляем Fл в уравнение (*):
Разделим обе части уравнения на m:
Перейдем от этого
Подставляем Fл в уравнение (*):
Разделим обе части уравнения на m:
Перейдем от этого
Слайд 12
x(t)≡x
y(t)≡y
vx=x’
vy=y’
ax=x’’
ay=y’’
Чтобы решить эту систему, нужно знать начальные условия.
Начальные условия:
x(0)=0; x’(0)=v0cosα;
y(0)=0; y’(0)=vosinα;
Сменим
x(t)≡x
y(t)≡y
vx=x’
vy=y’
ax=x’’
ay=y’’
Чтобы решить эту систему, нужно знать начальные условия.
Начальные условия:
x(0)=0; x’(0)=v0cosα;
y(0)=0; y’(0)=vosinα;
Сменим
Слайд 13Начальные условия:
U1(0)=0;
U2(0)=v0cosα;
U3(0)=0;
U4(0)=v0sinα.
Решением этой системы будут функции при заданных начальных условиях.
Начальные условия:
U1(0)=0;
U2(0)=v0cosα;
U3(0)=0;
U4(0)=v0sinα.
Решением этой системы будут функции при заданных начальных условиях.
Слайд 15ТЕМА: КРАЕВАЯ ЗАДАЧА
Постановка задачи. Снаряд летит с постоянной скоростью под углом α
ТЕМА: КРАЕВАЯ ЗАДАЧА
Постановка задачи. Снаряд летит с постоянной скоростью под углом α
Слайд 16Система дифференциальных уравнений:
Граничные условия (начальные условия, которые задаются на концах отрезка):
Система дифференциальных уравнений:
Граничные условия (начальные условия, которые задаются на концах отрезка):
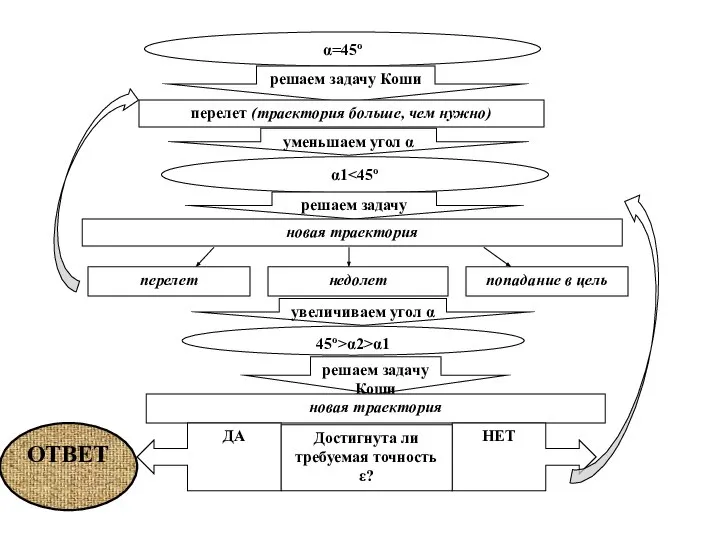
Слайд 17Дальность полета максимальна при α=45º.
Мы можем решить задачу Коши
при α
Дальность полета максимальна при α=45º.
Мы можем решить задачу Коши
при α
Слайд 18α=45º
решаем задачу Коши
перелет (траектория больше, чем нужно)
уменьшаем угол α
α1<45º
решаем задачу Коши
новая траектория
увеличиваем
α=45º
решаем задачу Коши
перелет (траектория больше, чем нужно)
уменьшаем угол α
α1<45º
решаем задачу Коши
новая траектория
увеличиваем
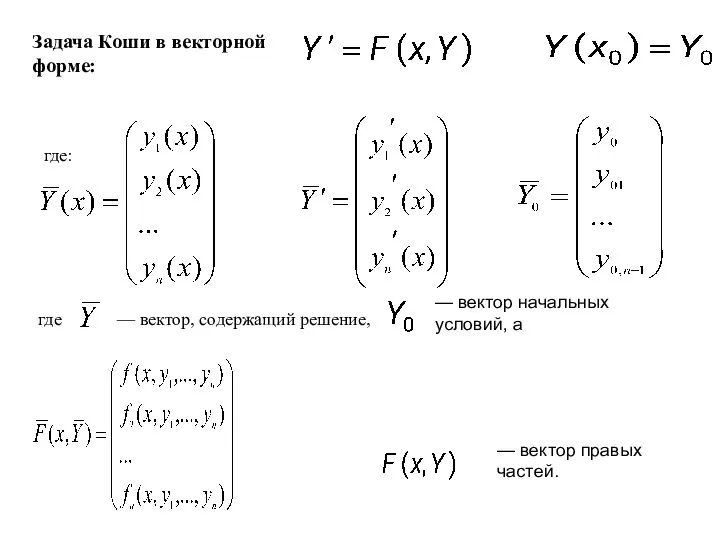
Слайд 19где:
где
— вектор начальных условий, а
— вектор правых частей.
— вектор,
где:
где
— вектор начальных условий, а
— вектор правых частей.
— вектор,
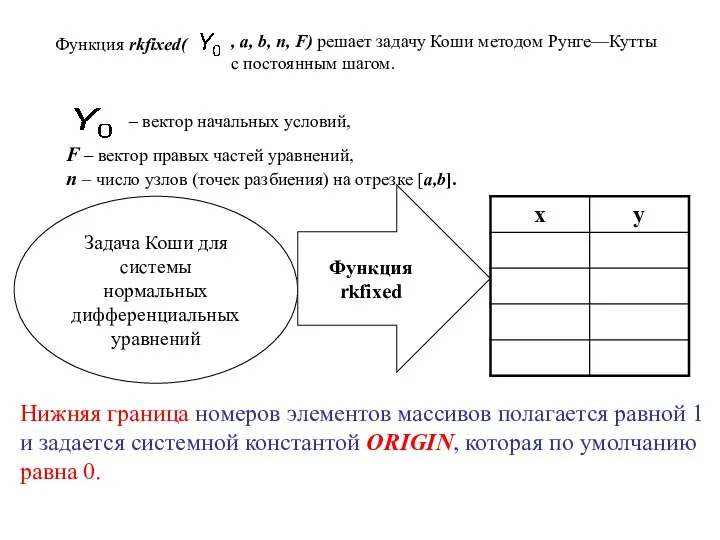
Слайд 20Задача Коши для системы
нормальных
дифференциальных
уравнений
РЕШЕНИЕ ЗАДАЧИ
?
КАК ЭТО СДЕЛАТЬ В MATHCAD?
Функция
Задача Коши для системы
нормальных
дифференциальных
уравнений
РЕШЕНИЕ ЗАДАЧИ
?
КАК ЭТО СДЕЛАТЬ В MATHCAD?
Функция

Слайд 21Функция rkfixed(
, a, b, n, F) решает задачу Коши методом Рунге—Кутты
с
Функция rkfixed(
, a, b, n, F) решает задачу Коши методом Рунге—Кутты
с
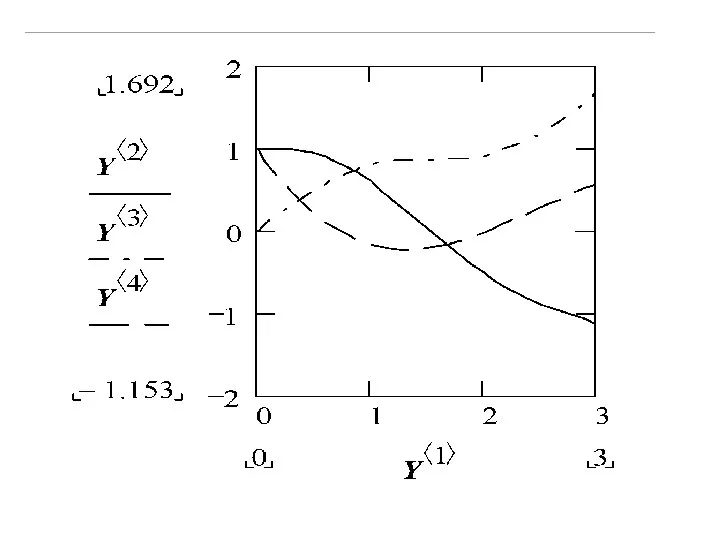
Слайд 22Пример. Решить систему дифференциальных уравнений на отрезке [0,3] с шагом 0.1, построить
Пример. Решить систему дифференциальных уравнений на отрезке [0,3] с шагом 0.1, построить
![Пример. Решить систему дифференциальных уравнений на отрезке [0,3] с шагом 0.1, построить](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1023758/slide-21.jpg)
Слайд 24В этой модели учитывается один показатель: количество публикаций в данный момент.
х(t)≡х;
ПРЕДПОЛОЖЕНИЕ: скорость
В этой модели учитывается один показатель: количество публикаций в данный момент.
х(t)≡х;
ПРЕДПОЛОЖЕНИЕ: скорость
Слайд 25Запишем дифференциальное уравнение:
Решением уравнения такого вида является функция вида еt; et→∞; t→∞.
!
Запишем дифференциальное уравнение:
Решением уравнения такого вида является функция вида еt; et→∞; t→∞.
!
Слайд 26Модель численности популяций.
N(t) – численность популяции в момент времени t.
Скорость v
Модель численности популяций.
N(t) – численность популяции в момент времени t.
Скорость v
Слайд 27Пример 3. Модель гонки вооружений Ричардсона.
x(t)≡x – расходы на вооружение «зеленых»;
y(t)≡y –
Пример 3. Модель гонки вооружений Ричардсона.
x(t)≡x – расходы на вооружение «зеленых»;
y(t)≡y –
Слайд 28ПРЕДПОЛОЖЕНИЕ 3: Предположим, что у каждого государства могут быть какие-то претензии.
Введем
ПРЕДПОЛОЖЕНИЕ 3: Предположим, что у каждого государства могут быть какие-то претензии.
Введем
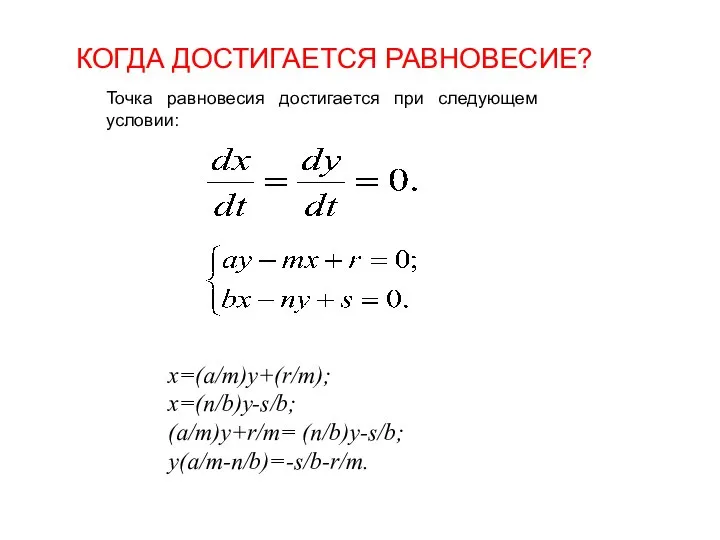
Слайд 29КОГДА ДОСТИГАЕТСЯ РАВНОВЕСИЕ?
Точка равновесия достигается при следующем условии:
x=(a/m)y+(r/m);
x=(n/b)y-s/b;
(a/m)y+r/m= (n/b)y-s/b;
y(a/m-n/b)=-s/b-r/m.
КОГДА ДОСТИГАЕТСЯ РАВНОВЕСИЕ?
Точка равновесия достигается при следующем условии:
x=(a/m)y+(r/m);
x=(n/b)y-s/b;
(a/m)y+r/m= (n/b)y-s/b;
y(a/m-n/b)=-s/b-r/m.
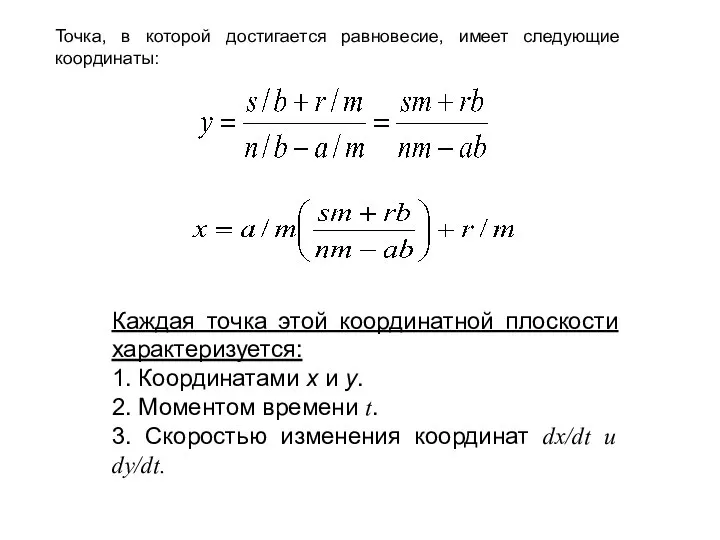
Слайд 30Точка, в которой достигается равновесие, имеет следующие координаты:
Каждая точка этой координатной плоскости
Точка, в которой достигается равновесие, имеет следующие координаты:
Каждая точка этой координатной плоскости
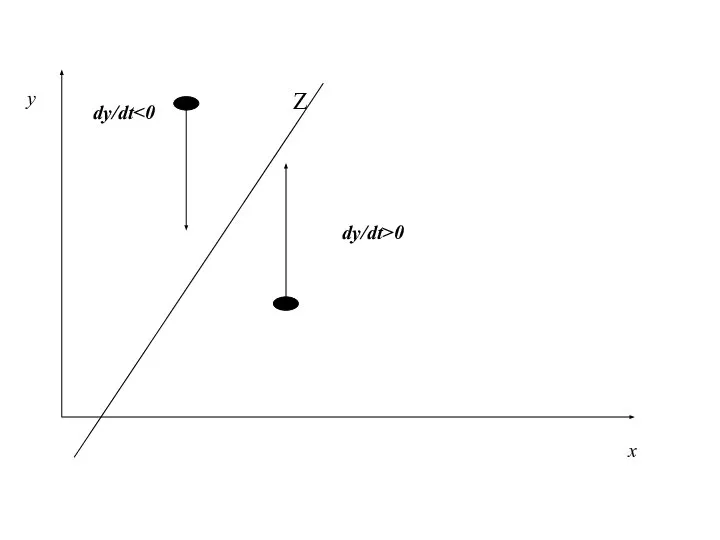
Слайд 31- точка равновесия. Стрелка показывает притяжение точек к прямой.
Если dx/dt=0, то прямая
- точка равновесия. Стрелка показывает притяжение точек к прямой.
Если dx/dt=0, то прямая
Слайд 32х
y
х
y
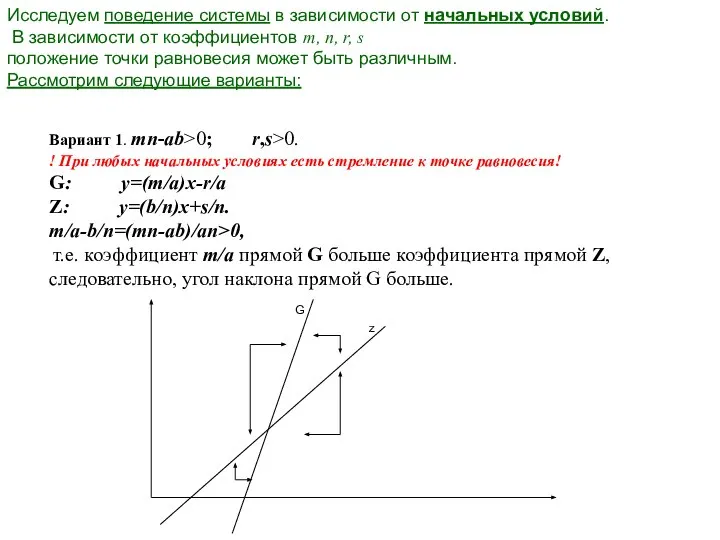
Слайд 33Исследуем поведение системы в зависимости от начальных условий.
В зависимости от коэффициентов
Исследуем поведение системы в зависимости от начальных условий.
В зависимости от коэффициентов
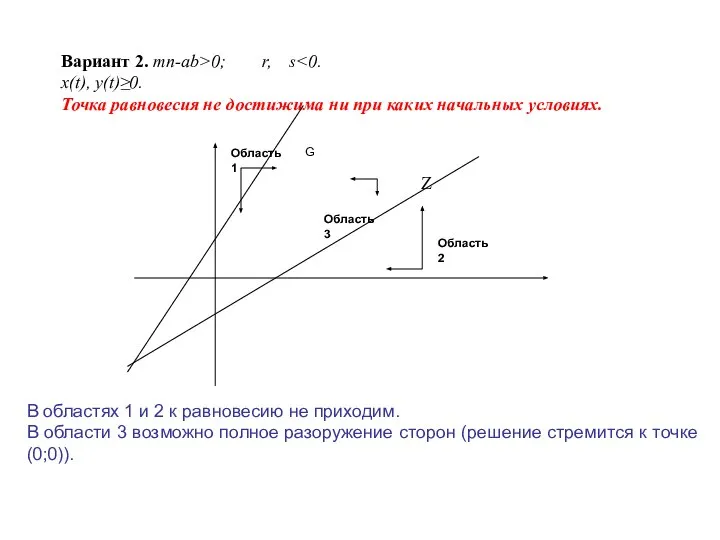
Слайд 34Вариант 2. mn-ab>0; r, s<0.
x(t), y(t)≥0.
Точка равновесия не достижима ни при каких
x(t), y(t)≥0.
Точка равновесия не достижима ни при каких
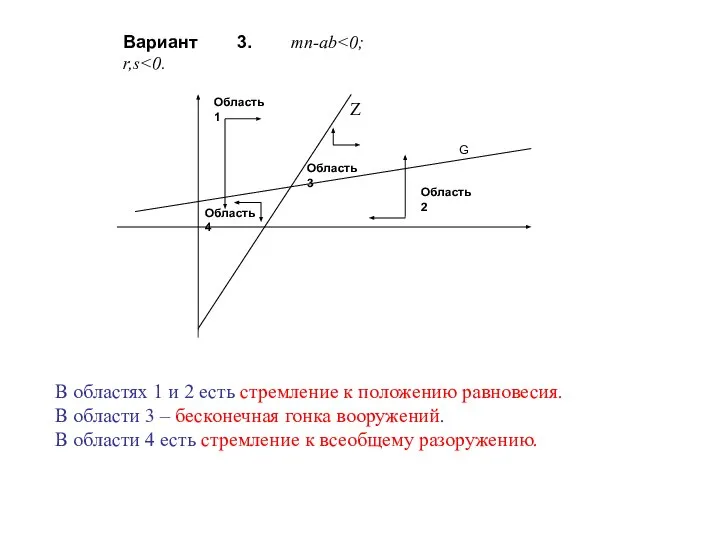
Слайд 35Вариант 3. mn-ab<0; r,s<0.
В областях 1 и 2 есть стремление к положению
Вариант 3. mn-ab<0; r,s<0.
В областях 1 и 2 есть стремление к положению
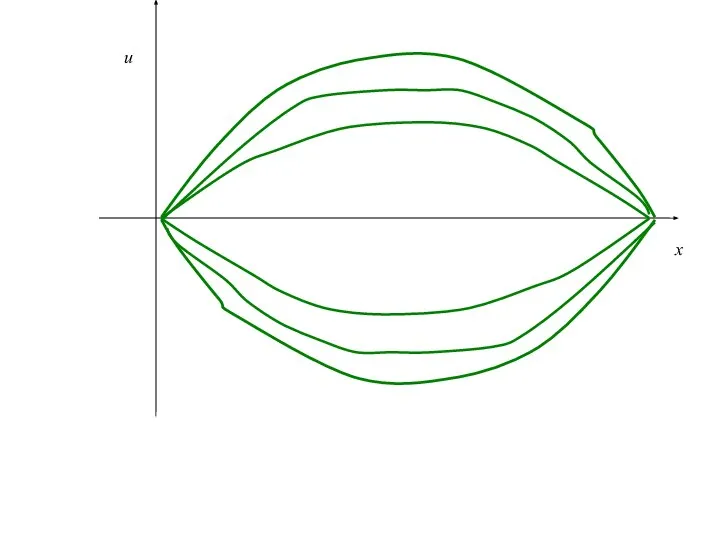
Слайд 36ПРОВЕРКА АДЕКВАТНОСТИ МОДЕЛИ делалась на реальных данных.
Рассматривались 2 блока:
х –
ПРОВЕРКА АДЕКВАТНОСТИ МОДЕЛИ делалась на реальных данных.
Рассматривались 2 блока:
х –
Слайд 37Таблица 1. Затраты на вооружение.
Таблица 1. Затраты на вооружение.
Слайд 38Δz/Δt
z
10
230
250
210
20
30
Вывод: в эту модель хорошо укладываются реальные данные.
Δz/Δt
z
10
230
250
210
20
30
Вывод: в эту модель хорошо укладываются реальные данные.
Слайд 39Моделирование прогиба балки
Моделирование прогиба балки

Слайд 40
На свободный конец балки единичной длины и постоянной жесткости (ЕJ=1, Е
На свободный конец балки единичной длины и постоянной жесткости (ЕJ=1, Е
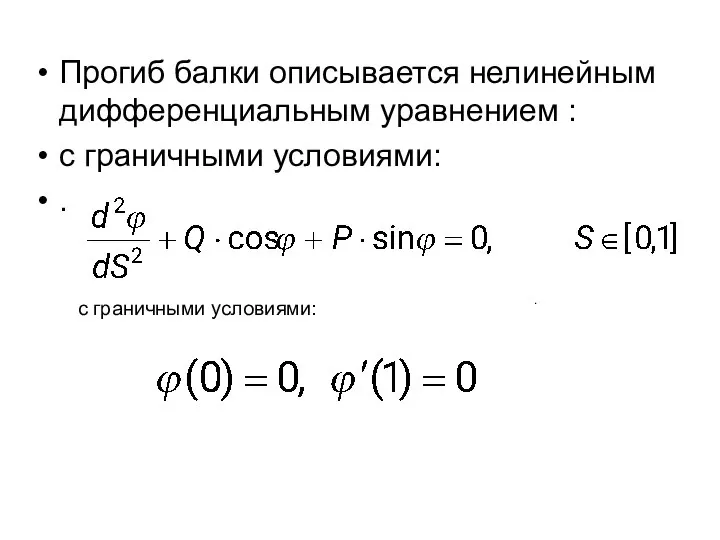
Слайд 41Прогиб балки описывается нелинейным дифференциальным уравнением :
с граничными условиями:
.
с граничными условиями:
.
Прогиб балки описывается нелинейным дифференциальным уравнением :
с граничными условиями:
.
с граничными условиями:
.
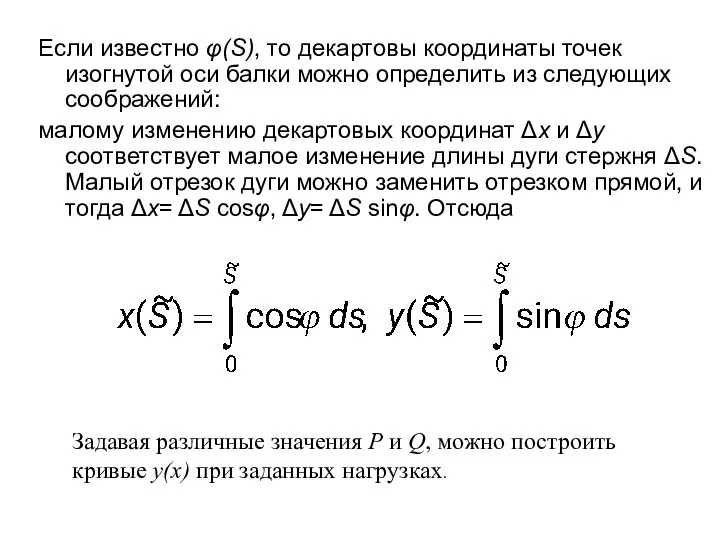
Слайд 42Если известно φ(S), то декартовы координаты точек изогнутой оси балки можно определить
Если известно φ(S), то декартовы координаты точек изогнутой оси балки можно определить
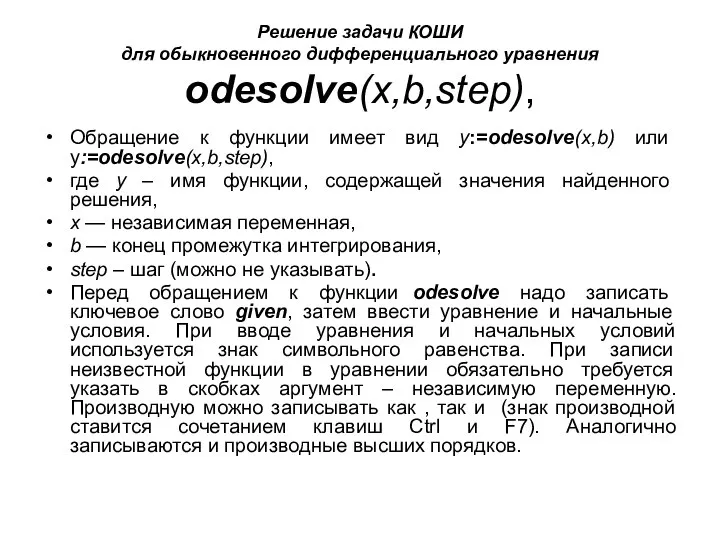
Слайд 43Решение задачи КОШИ
для обыкновенного дифференциального уравнения
odesolve(x,b,step),
Обращение к функции имеет вид y:=odesolve(x,b) или
Решение задачи КОШИ
для обыкновенного дифференциального уравнения
odesolve(x,b,step),
Обращение к функции имеет вид y:=odesolve(x,b) или
Слайд 44
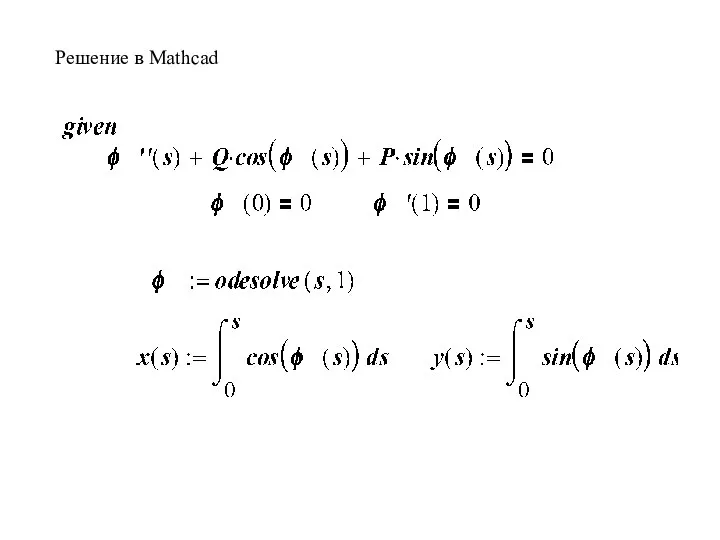
Решение в Mathcad
Решение в Mathcad
Слайд 45Применение метода конечных разностей
дифференциальная задача сводится к решению системы алгебраических уравнений.
Применение метода конечных разностей
дифференциальная задача сводится к решению системы алгебраических уравнений.
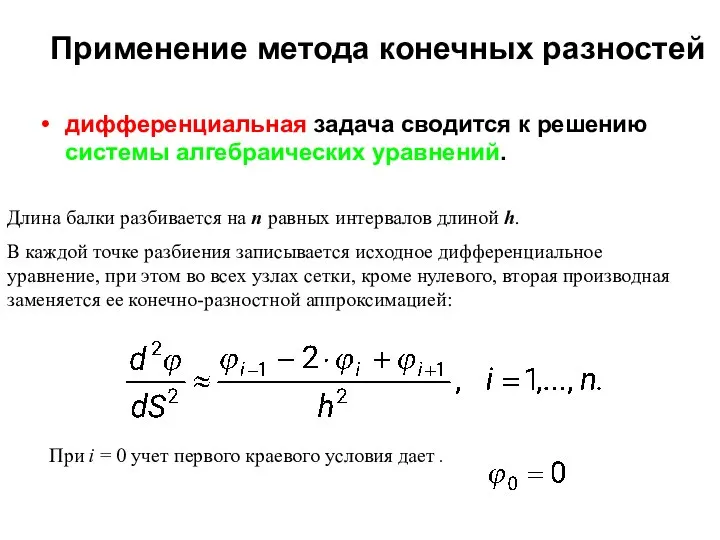
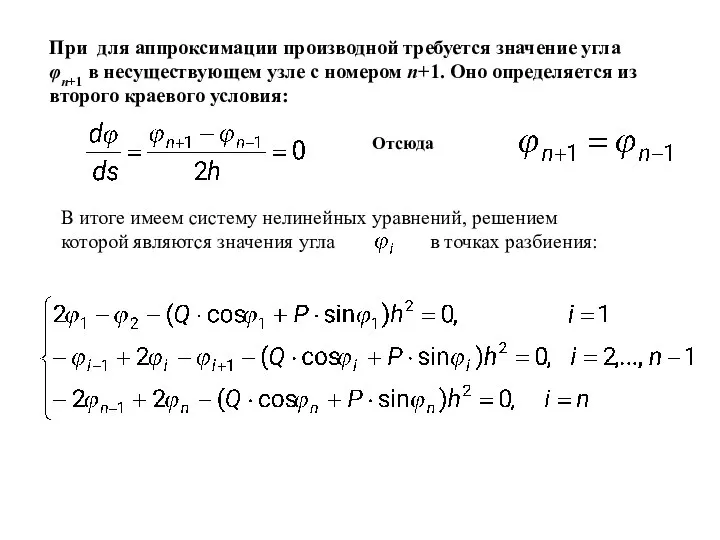
Слайд 46При для аппроксимации производной требуется значение угла φn+1 в несуществующем узле с
При для аппроксимации производной требуется значение угла φn+1 в несуществующем узле с
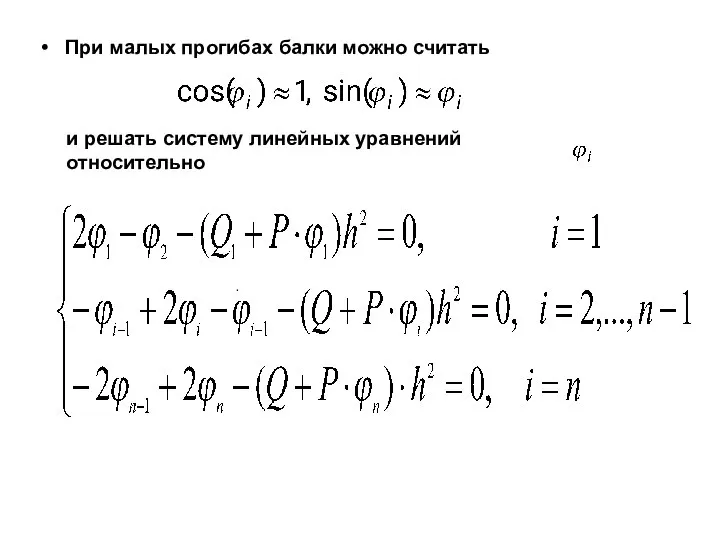
Слайд 47При малых прогибах балки можно считать
и решать систему линейных уравнений относительно
При малых прогибах балки можно считать
и решать систему линейных уравнений относительно
Слайд 48Решение уравнений в частных производных
Уравнения в частных производных используются при моделировании
Решение уравнений в частных производных Уравнения в частных производных используются при моделировании
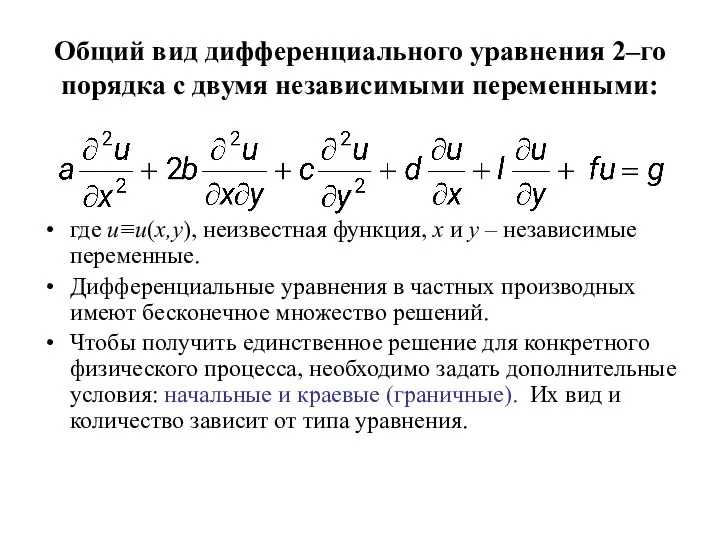
Слайд 49Общий вид дифференциального уравнения 2–го порядка с двумя независимыми переменными:
где u≡u(x,y), неизвестная
Общий вид дифференциального уравнения 2–го порядка с двумя независимыми переменными:
где u≡u(x,y), неизвестная
Слайд 50ТИПЫ уравнений в частных производных
Тип уравнения определяется по виду коэффициентов и соотношениям
ТИПЫ уравнений в частных производных
Тип уравнения определяется по виду коэффициентов и соотношениям
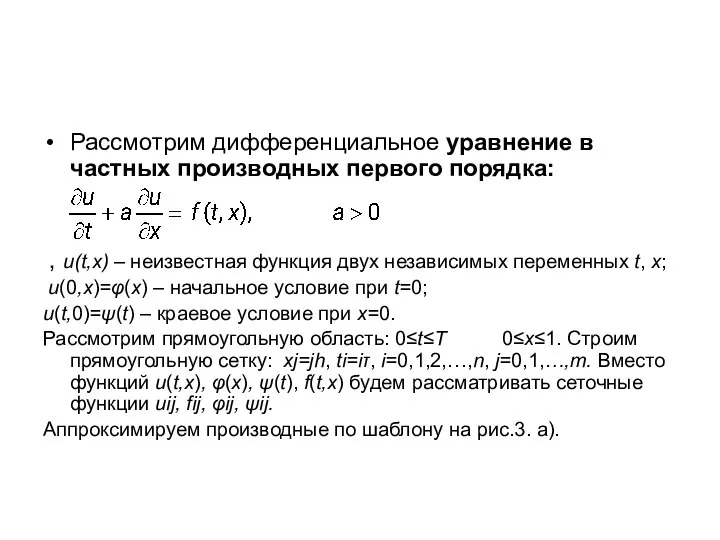
Слайд 51Рассмотрим дифференциальное уравнение в частных производных первого порядка:
, u(t,x) – неизвестная функция
Рассмотрим дифференциальное уравнение в частных производных первого порядка:
, u(t,x) – неизвестная функция
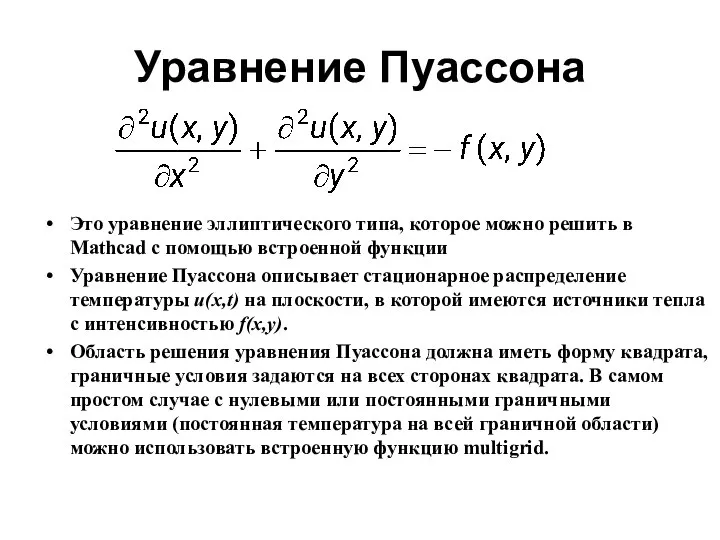
Слайд 52Уравнение Пуассона
Это уравнение эллиптического типа, которое можно решить в Mathcad с
Уравнение Пуассона
Это уравнение эллиптического типа, которое можно решить в Mathcad с
Слайд 53Функция multigrid (f, r) имеет два аргумента:
f – имя матрицы, задающей
Функция multigrid (f, r) имеет два аргумента:
f – имя матрицы, задающей
Слайд 54Пример 2. Решить уравнение Пуассона, если при , m = 32 ,
Пример 2. Решить уравнение Пуассона, если при , m = 32 ,
Слайд 55Аппроксимация частных производных
функция двух переменных.
Пусть область решения заменена сеткой,
Аппроксимация частных производных
функция двух переменных.
Пусть область решения заменена сеткой,
Слайд 56Шаблон «крест»
Шаг по переменной t равен τ.
по переменной x шаг равен
Шаблон «крест»
Шаг по переменной t равен τ.
по переменной x шаг равен
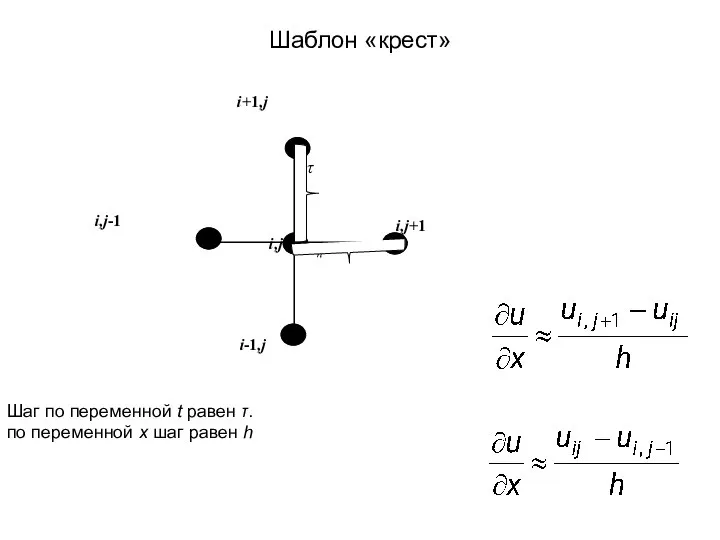
Слайд 57По этому шаблону частные производные функции
в узле (i,j) можно аппроксимировать следующим
По этому шаблону частные производные функции
в узле (i,j) можно аппроксимировать следующим
Слайд 58Дифференциальное уравнение в частных производных первого порядка:
,u(t,x) – неизвестная функция двух независимых
Дифференциальное уравнение в частных производных первого порядка:
,u(t,x) – неизвестная функция двух независимых
Слайд 59Аппроксимируем производные по шаблону на рис
Запишем исходное уравнение в каждом внутреннем
Аппроксимируем производные по шаблону на рис
Запишем исходное уравнение в каждом внутреннем
Слайд 60Отсюда
где i=0,1,2,…,n; j=0,1,2,…, m
Вычисления идут по слоям. На нулевом слое u0j=φj
Отсюда
где i=0,1,2,…,n; j=0,1,2,…, m
Вычисления идут по слоям. На нулевом слое u0j=φj
Слайд 61Схема устойчива при 0≤τ≤h/a, при этом u(t,x), φ(х), ψ(t) должны быть дважды
Схема устойчива при 0≤τ≤h/a, при этом u(t,x), φ(х), ψ(t) должны быть дважды
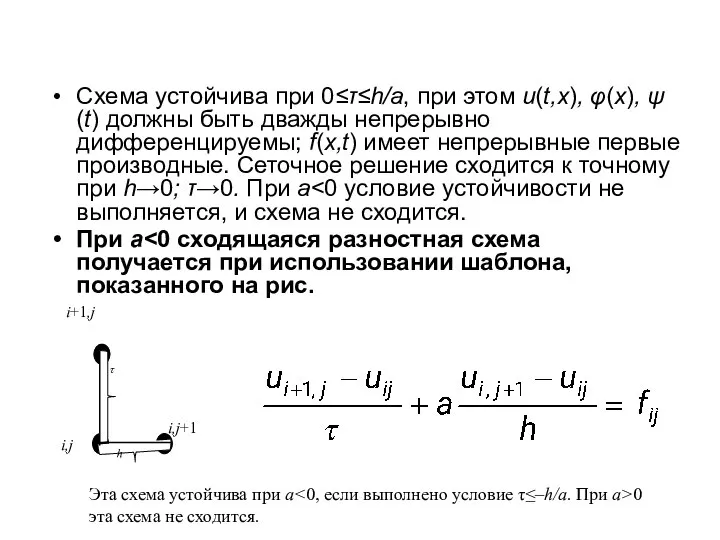
Слайд 62При использовании шаблона, изображенного на рис, получается неявная разностная схема. Вычисления можно
При использовании шаблона, изображенного на рис, получается неявная разностная схема. Вычисления можно
Слайд 63Пример.
Пример.
Слайд 64 Уравнение колебания струны
Рассмотрим одномерное волновое уравнение, которое описывает, например, свободное колебание
Уравнение колебания струны
Рассмотрим одномерное волновое уравнение, которое описывает, например, свободное колебание
Слайд 65x
u
x
u
 Емкостное и индуктивное сопротивления переменного тока. Закон Ома для электрической цепи переменного тока
Емкостное и индуктивное сопротивления переменного тока. Закон Ома для электрической цепи переменного тока Prezentatsia_6
Prezentatsia_6 Электромагнитное поле
Электромагнитное поле Соединение проводников
Соединение проводников Работа газа и пара при расширении. Двигатель внутреннего сгорания. КПД
Работа газа и пара при расширении. Двигатель внутреннего сгорания. КПД Уничтожение полукруговой девиации магнитного компаса способом Эри
Уничтожение полукруговой девиации магнитного компаса способом Эри Теория движения военных колесных машин. Лекция 3
Теория движения военных колесных машин. Лекция 3 Модели атомов. Опыт Резерфорда
Модели атомов. Опыт Резерфорда Структура и содержание контрольных измерительных материалов ЕГЭ по физике
Структура и содержание контрольных измерительных материалов ЕГЭ по физике Квантовые свойства микрочастиц. Волны де Бройля. Волновая функция
Квантовые свойства микрочастиц. Волны де Бройля. Волновая функция Строение атома (8 класс)
Строение атома (8 класс) Физические явления и интересные факты
Физические явления и интересные факты Волновые процессы
Волновые процессы =?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?=
=?utf-8?B?0JrQstCw0L3RgtC+0LLRi9C1INC_0L7RgdGC0YPQu9Cw0YLRiyDQkdC+0YDQsC4ucHB0eA==?= Термодинамика и кинетика химических реакций
Термодинамика и кинетика химических реакций Разработка проекта устройства снижающего тяжесть последствий при потере устойчивости дорожных катков и компакторов
Разработка проекта устройства снижающего тяжесть последствий при потере устойчивости дорожных катков и компакторов Презентация _Механические передачи. 5 класс_
Презентация _Механические передачи. 5 класс_ Транспортная задача для маршрутизации перевозок
Транспортная задача для маршрутизации перевозок Все загадки света. Оптика
Все загадки света. Оптика Оптика. Законы отражения
Оптика. Законы отражения Голография и ее применение
Голография и ее применение Перемещение при прямолинейном равноускоренном движении. Урок 1
Перемещение при прямолинейном равноускоренном движении. Урок 1 Механика. Обобщающий урок. 10 класс
Механика. Обобщающий урок. 10 класс Практическое применение работы, совершаемой в магнитном поле
Практическое применение работы, совершаемой в магнитном поле Физика ФЭН 2022
Физика ФЭН 2022 Pезонанс прояви і застосування
Pезонанс прояви і застосування Задача о скатывании симметричного тела с наклонной плоскости без проскальзывания. 3 подхода
Задача о скатывании симметричного тела с наклонной плоскости без проскальзывания. 3 подхода Подшипники насосов и компрессоров
Подшипники насосов и компрессоров