- Определение перемещений. Лекция 6

Содержание
- 2. 1. Понятие о перемещениях При воздействии нагрузки, температуры и других факторов сооружения меняют свою форму, а
- 3. Методы определения перемещений основаны на вычислении работ внешних и внутренних сил. 2. Действительные работы внешних и
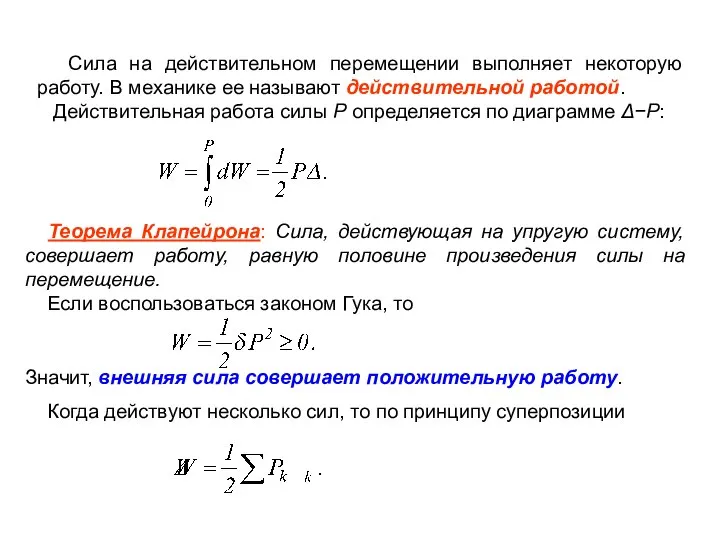
- 4. Сила на действительном перемещении выполняет некоторую работу. В механике ее называют действительной работой. Действительная работа силы
- 5. В идеально-упругой системе работа внешних сил W полностью переходит в потенциальную энергию деформации U: W =U.
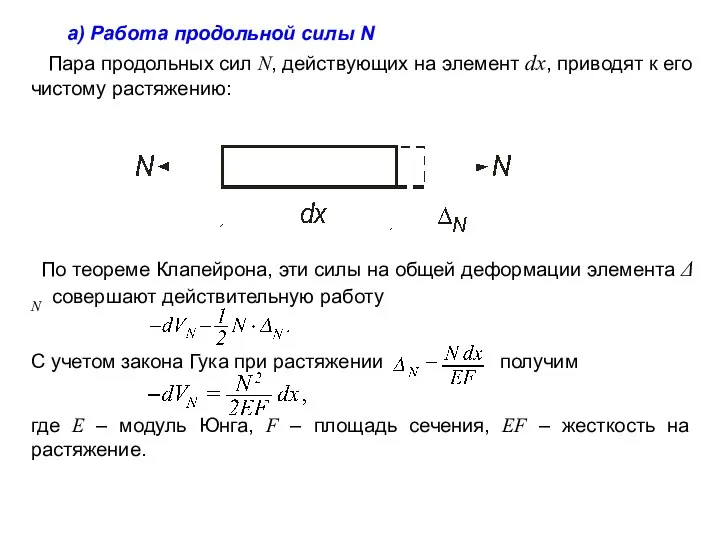
- 6. а) Работа продольной силы N Пара продольных сил N, действующих на элемент dx, приводят к его
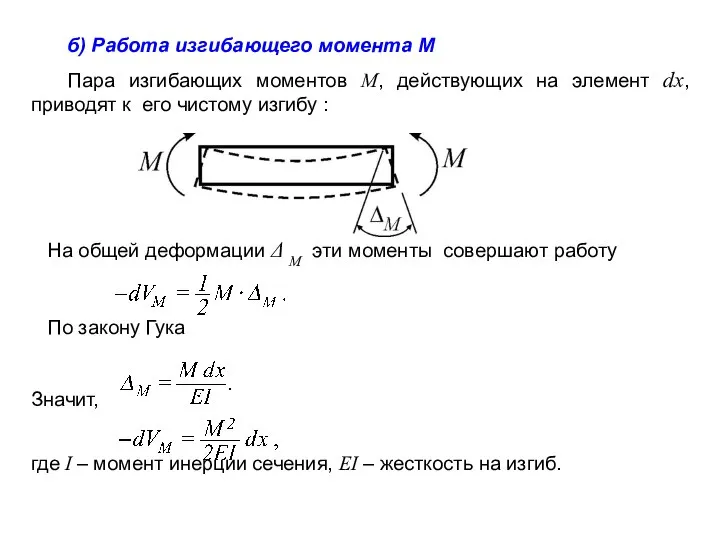
- 7. б) Работа изгибающего момента M Пара изгибающих моментов M, действующих на элемент dx, приводят к его
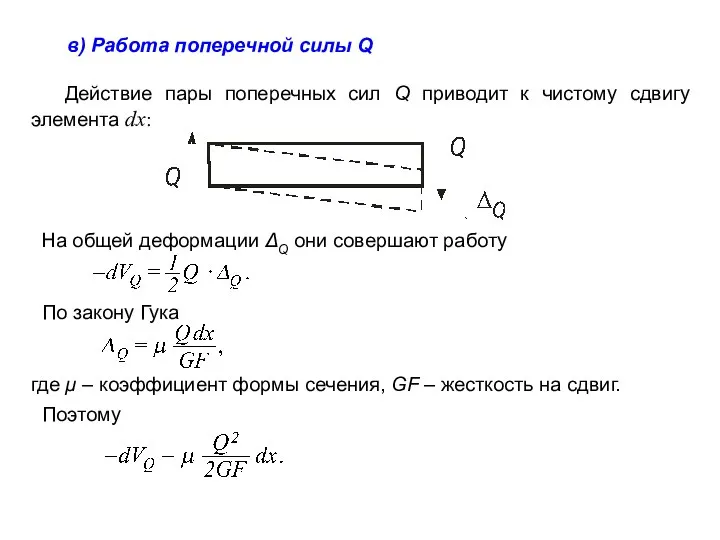
- 8. в) Работа поперечной силы Q Действие пары поперечных сил Q приводит к чистому сдвигу элемента dx:
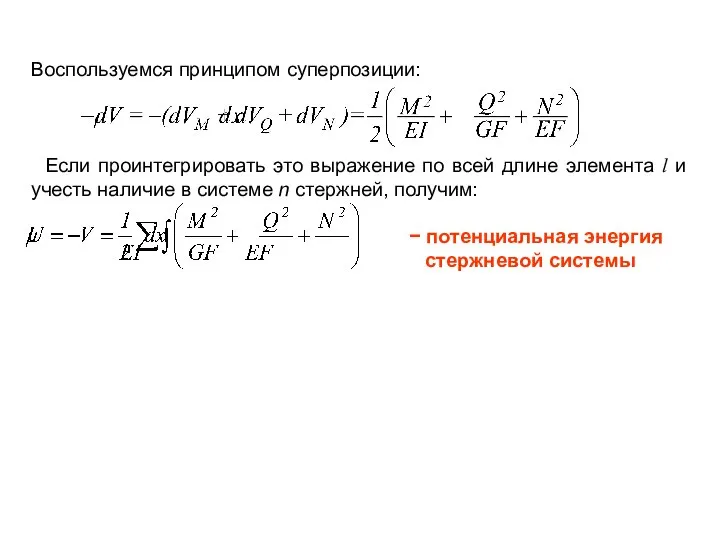
- 9. Воспользуемся принципом суперпозиции: Если проинтегрировать это выражение по всей длине элемента l и учесть наличие в
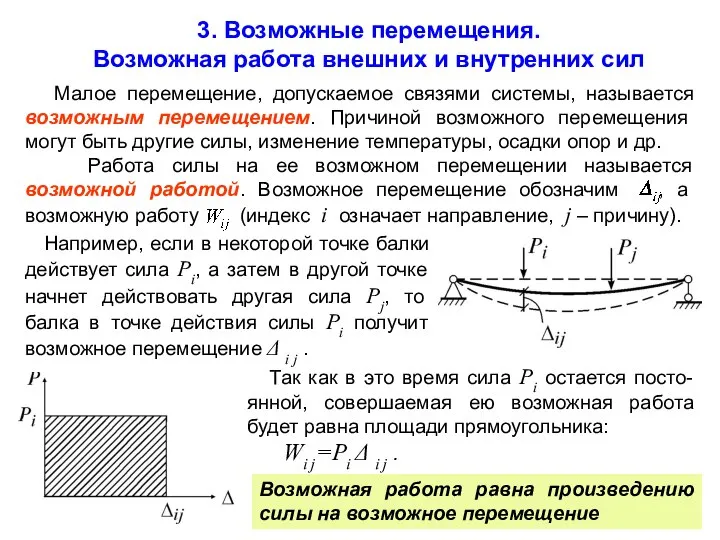
- 10. Малое перемещение, допускаемое связями системы, называется возможным перемещением. Причиной возможного перемещения могут быть другие силы, изменение
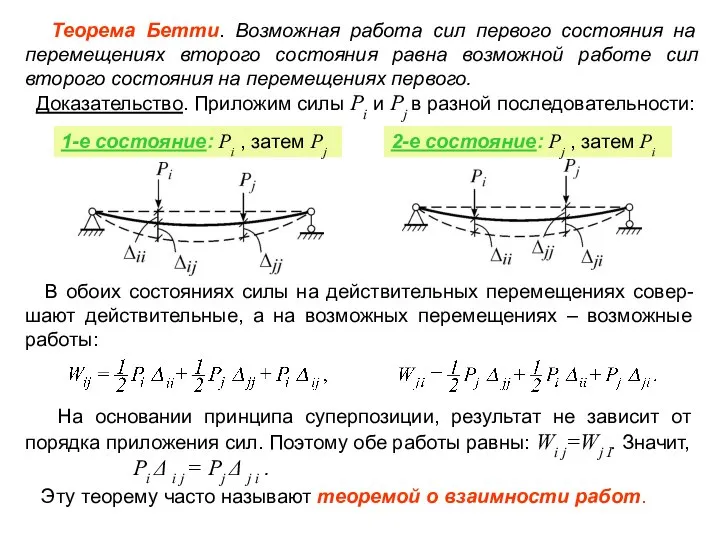
- 11. Теорема Бетти. Возможная работа сил первого состояния на перемещениях второго состояния равна возможной работе сил второго
- 12. Определим возможную работу внутренних сил. Для этого рассмотрим два состояния системы: 1) действие силы Pi −
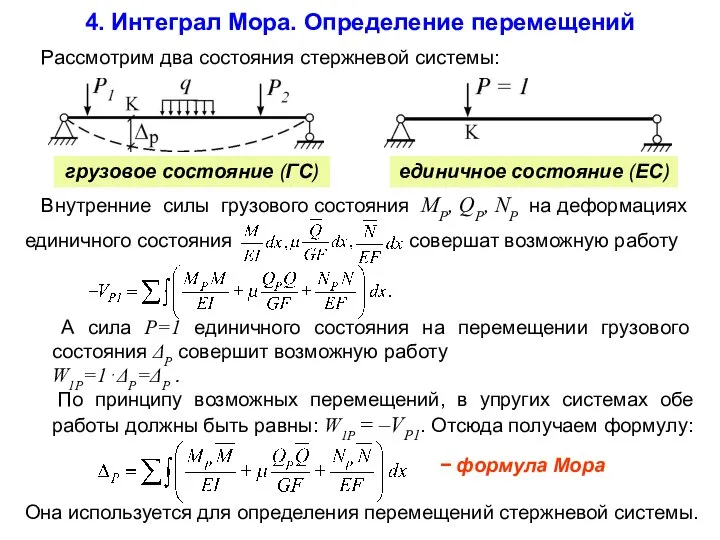
- 13. Внутренние силы грузового состояния MP, QP, NP на деформациях единичного состояния совершат возможную работу 4. Интеграл
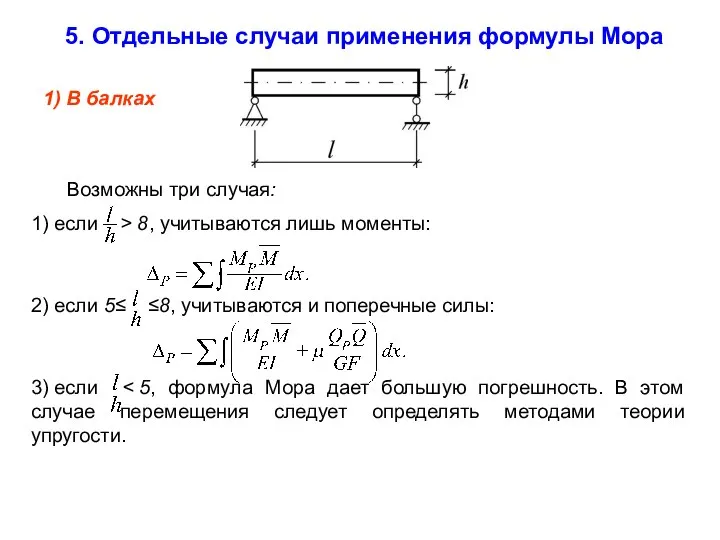
- 14. Возможны три случая: 1) если > 8, учитываются лишь моменты: 2) если 5≤ ≤8, учитываются и
- 16. Скачать презентацию
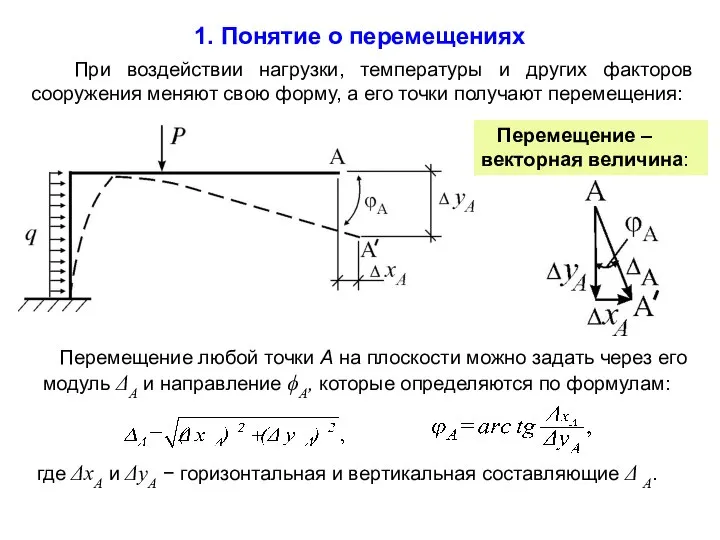
Слайд 3 Методы определения перемещений основаны на вычислении работ внешних и внутренних сил.
Методы определения перемещений основаны на вычислении работ внешних и внутренних сил.
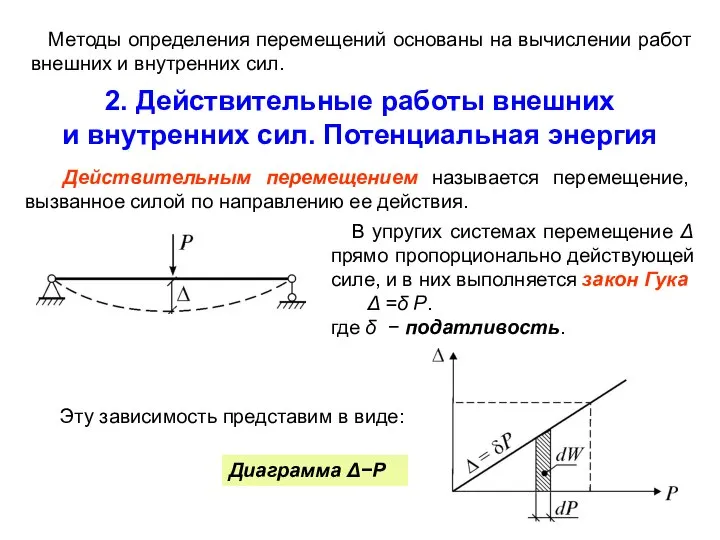
Слайд 4 Сила на действительном перемещении выполняет некоторую работу. В механике ее называют
Сила на действительном перемещении выполняет некоторую работу. В механике ее называют
Слайд 5 В идеально-упругой системе работа внешних сил W полностью переходит в потенциальную
В идеально-упругой системе работа внешних сил W полностью переходит в потенциальную
Слайд 6 а) Работа продольной силы N
Пара продольных сил N, действующих на элемент
а) Работа продольной силы N
Пара продольных сил N, действующих на элемент
Слайд 7 б) Работа изгибающего момента M
Пара изгибающих моментов M, действующих на элемент
б) Работа изгибающего момента M
Пара изгибающих моментов M, действующих на элемент
Слайд 8 в) Работа поперечной силы Q
Действие пары поперечных сил Q приводит к чистому
в) Работа поперечной силы Q
Действие пары поперечных сил Q приводит к чистому
Слайд 9Воспользуемся принципом суперпозиции:
Если проинтегрировать это выражение по всей длине элемента l
Воспользуемся принципом суперпозиции:
Если проинтегрировать это выражение по всей длине элемента l
Слайд 10 Малое перемещение, допускаемое связями системы, называется возможным перемещением. Причиной возможного перемещения
Малое перемещение, допускаемое связями системы, называется возможным перемещением. Причиной возможного перемещения
Слайд 11 Теорема Бетти. Возможная работа сил первого состояния на перемещениях второго состояния
Теорема Бетти. Возможная работа сил первого состояния на перемещениях второго состояния
Слайд 12 Определим возможную работу внутренних сил.
Для этого рассмотрим два состояния системы:
Определим возможную работу внутренних сил.
Для этого рассмотрим два состояния системы:
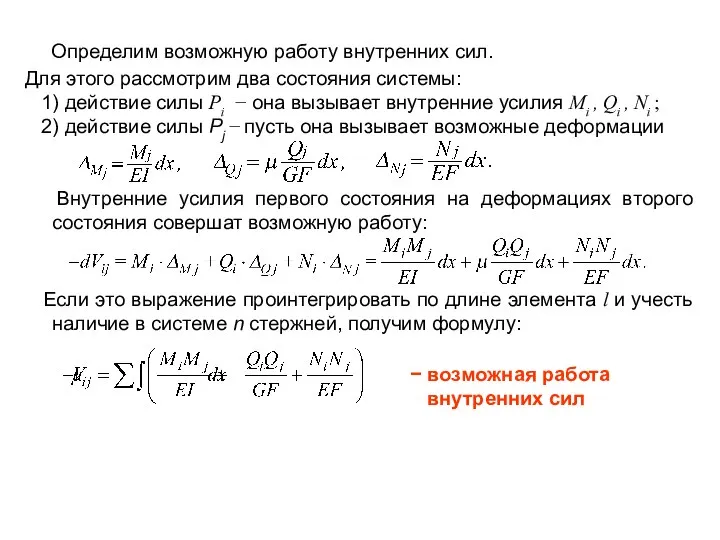
Слайд 13 Внутренние силы грузового состояния MP, QP, NP на деформациях
единичного состояния совершат
Внутренние силы грузового состояния MP, QP, NP на деформациях
единичного состояния совершат
Слайд 14Возможны три случая:
1) если > 8, учитываются лишь моменты:
2) если 5≤ ≤8, учитываются и поперечные
Возможны три случая:
1) если > 8, учитываются лишь моменты:
2) если 5≤ ≤8, учитываются и поперечные
 Лесопильное производство. Требования к дереворежущему инструменту и материалу из которого он изготовлен
Лесопильное производство. Требования к дереворежущему инструменту и материалу из которого он изготовлен Презентация на тему Механические свойства твердых тел
Презентация на тему Механические свойства твердых тел  Простые механизмы
Простые механизмы Интерактивные лабораторные работы по физике
Интерактивные лабораторные работы по физике Расчет режимов резания
Расчет режимов резания Входные геоэлектрические модели геологических сред с наличием зоны ГРП
Входные геоэлектрические модели геологических сред с наличием зоны ГРП Електризація тіл. Види електризації
Електризація тіл. Види електризації Энергия. 7 класс
Энергия. 7 класс Демонстрационный вариант контрольных измерительных материалов для проведения в 2015 году государственного экзамена по физике
Демонстрационный вариант контрольных измерительных материалов для проведения в 2015 году государственного экзамена по физике Как сохранить энергию?
Как сохранить энергию? Исчезла сила тяжести и что же произошло
Исчезла сила тяжести и что же произошло Электричество и магнетизм. Лекция № 3
Электричество и магнетизм. Лекция № 3 Аморфные и нанокристаллические металлы и сплавы
Аморфные и нанокристаллические металлы и сплавы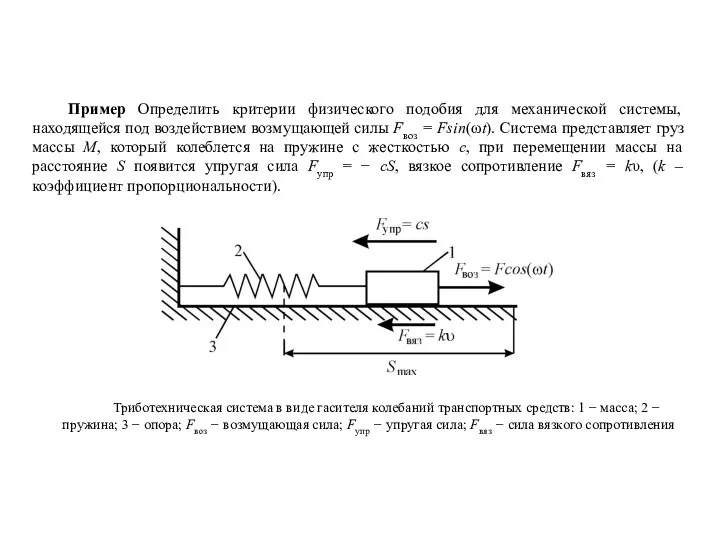 Определение критериев физического подобия для механической системы
Определение критериев физического подобия для механической системы Червячные передачи
Червячные передачи DZ-3
DZ-3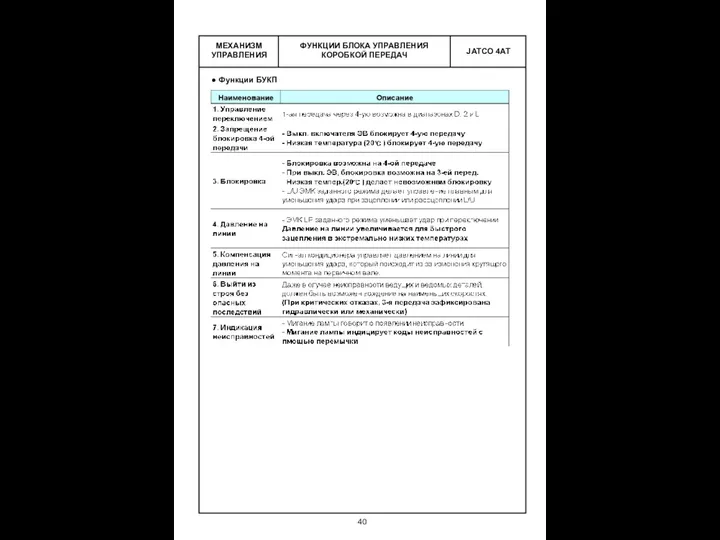 Механизм управления. Функции блока управления коробкой передач
Механизм управления. Функции блока управления коробкой передач Творческое объединение авиаторы
Творческое объединение авиаторы Регуляторы электрических режимов
Регуляторы электрических режимов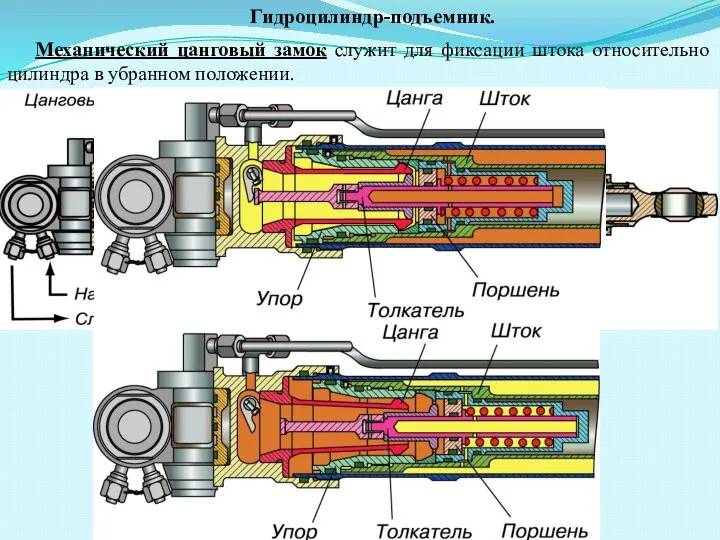 Гидроцилиндр-подъемник
Гидроцилиндр-подъемник Свободное падение тел
Свободное падение тел Определите вид движения
Определите вид движения Реле контроля земли
Реле контроля земли лекция 1 Введение. Кинематика материальной точки
лекция 1 Введение. Кинематика материальной точки Презентация на тему Сейсмограф
Презентация на тему Сейсмограф  Решение задач по статике
Решение задач по статике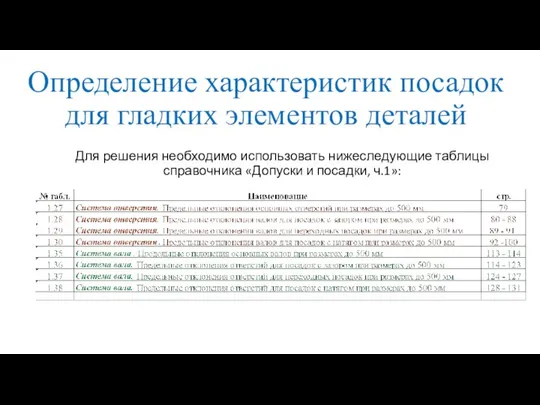 Определение характеристик посадок для гладких элементов деталей
Определение характеристик посадок для гладких элементов деталей Тест по теме: Электромагнитное поле
Тест по теме: Электромагнитное поле