- Основные понятия теории механизмов и машин

Содержание
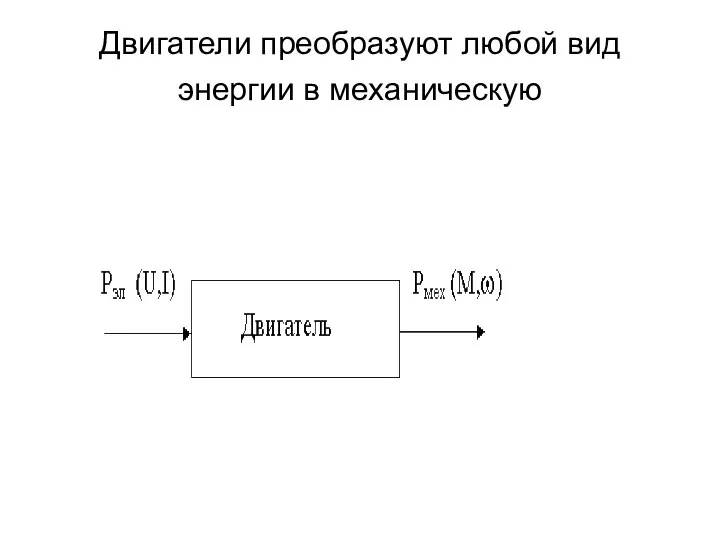
- 2. Двигатели преобразуют любой вид энергии в механическую
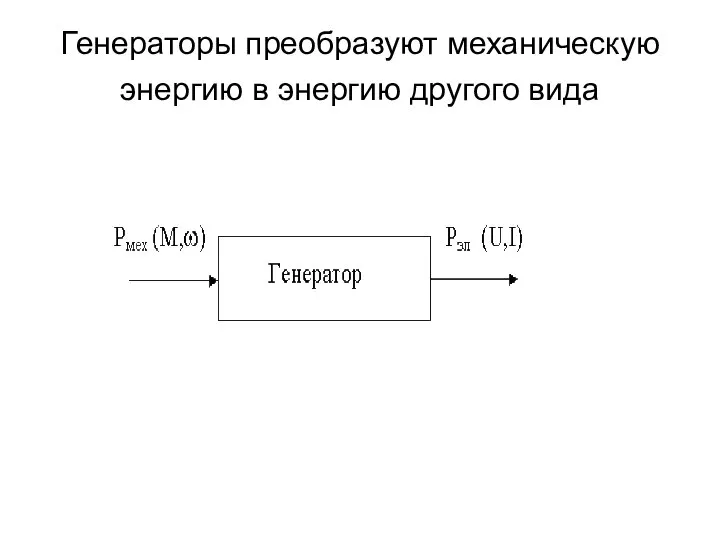
- 3. Генераторы преобразуют механическую энергию в энергию другого вида
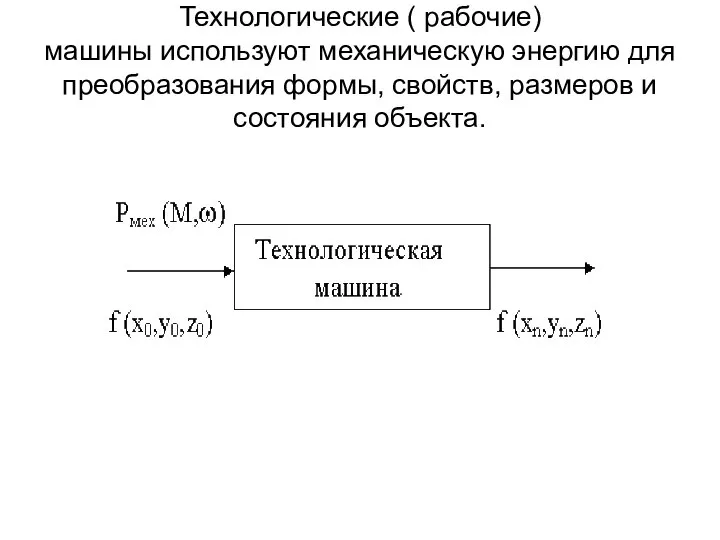
- 4. Технологические ( рабочие) машины используют механическую энергию для преобразования формы, свойств, размеров и состояния объекта.
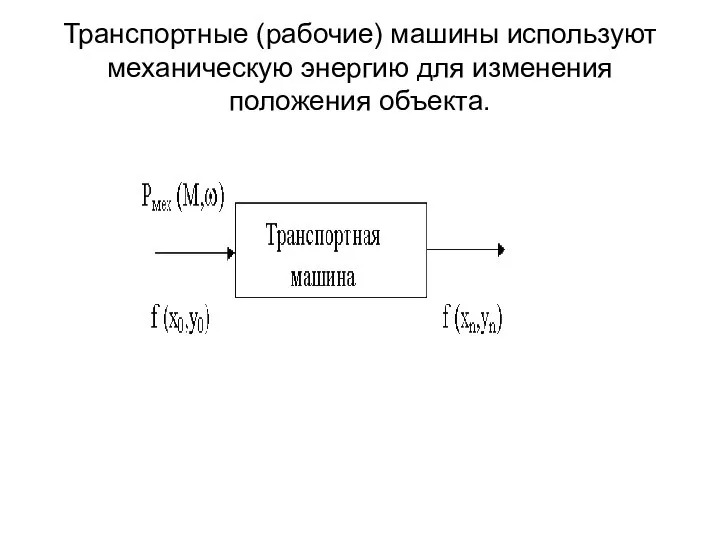
- 5. Транспортные (рабочие) машины используют механическую энергию для изменения положения объекта.
- 6. Машинный агрегат - развитое машинное устройство, состоящее из двигателя, передаточных механизмов и рабочей машины. Деталь –
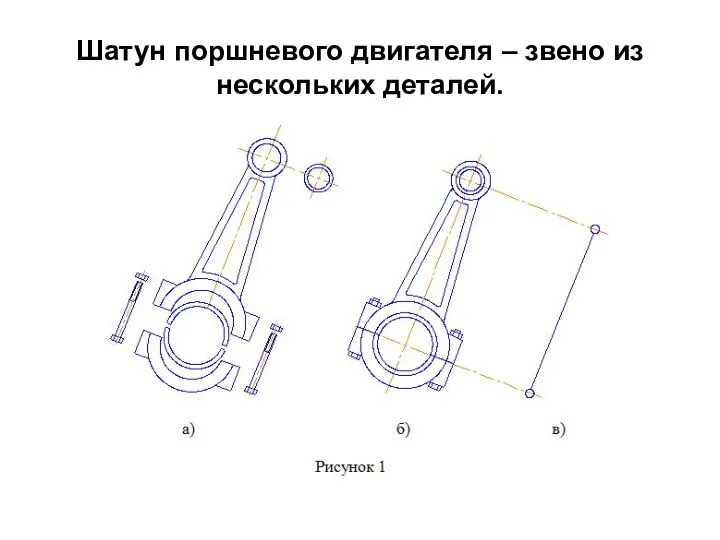
- 7. Шатун поршневого двигателя – звено из нескольких деталей.
- 8. Кинематическая схема – это условное изображение звеньев и всего механизма, выполненное строго в масштабе. Масштаб -
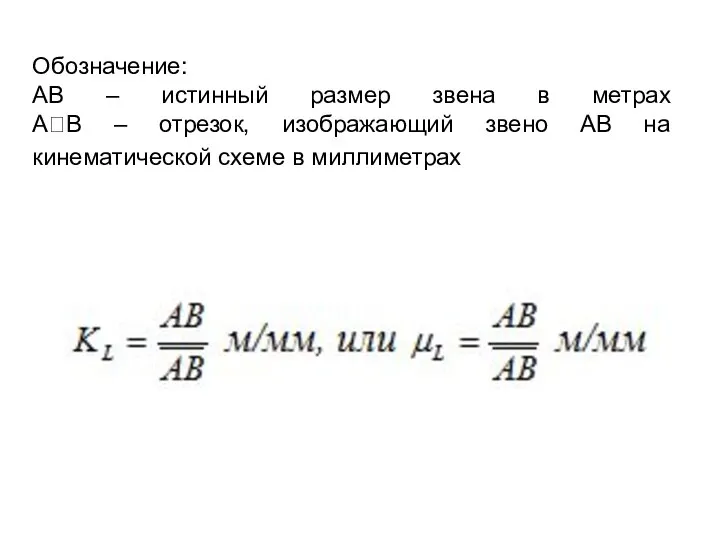
- 9. Обозначение: AB – истинный размер звена в метрах AB – отрезок, изображающий звено АВ на кинематической
- 10. Виды звеньев: кривошип – звено, совершающее вращательное движение вокруг неподвижной оси и делающее при этом полный
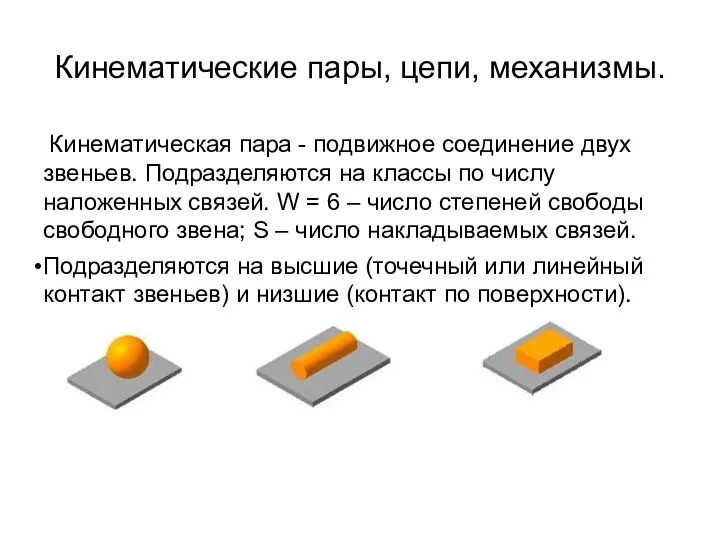
- 11. Кинематические пары, цепи, механизмы. Кинематическая пара - подвижное соединение двух звеньев. Подразделяются на классы по числу
- 12. Кинематическая цепь – это сочетание звеньев (входных – заданных и выходных - искомых), соединенных в кинематические
- 13. Виды механизмов: механизмы двигателей и преобразователей; передаточные механизмы; исполнительные механизмы; механизмы управления, контроля и регулирования; механизмы
- 14. Структурный анализ и синтез механизмов. Определение числа степеней свободы кинематической цепи. Число входных звеньев для превращения
- 15. Число степеней свободы кинематической цепи определяется как разность общего числа степенeй свободы равного 6k и числа
- 16. Число связей определяется как сумма произведений класса звена S на число звеньев pi каждого класса: S1=p1,
- 17. Для плоскости (плоского механизма) последняя формула запишется: W=3k–p4–2p5–3 или W=3n–2p5–p4, где n = k – 1
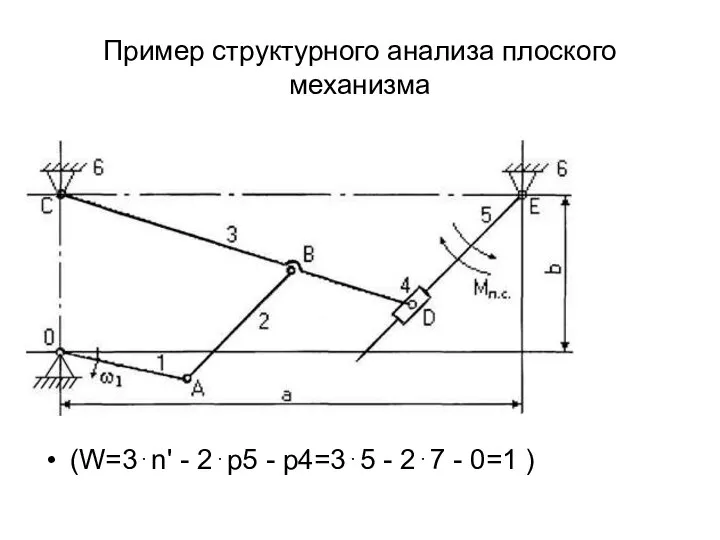
- 18. Пример структурного анализа плоского механизма (W=3⋅n' - 2⋅p5 - p4=3⋅5 - 2⋅7 - 0=1 )
- 19. Кинематический анализ (графический, графоаналитический - метод планов скоростей и ускорений - и аналитический) - это исследование
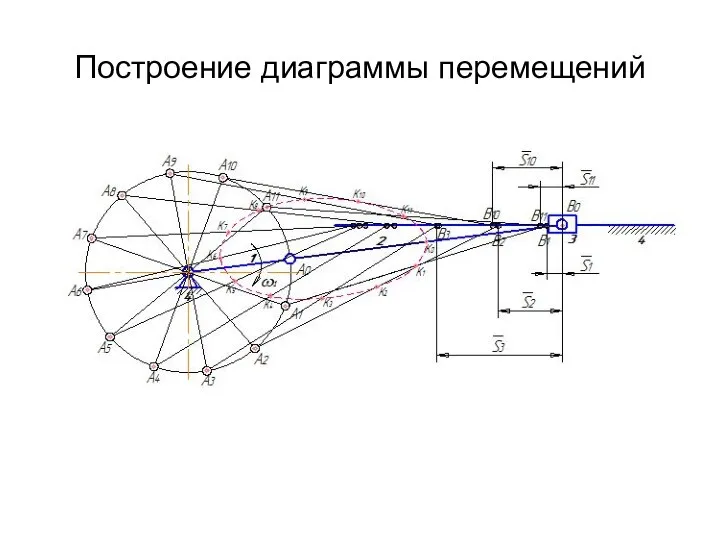
- 20. Построение диаграммы перемещений
- 21. Динамика механизмов и машин. Задачи динамики изучение сил, действующих на звенья механизма, и определение неизвестных сил
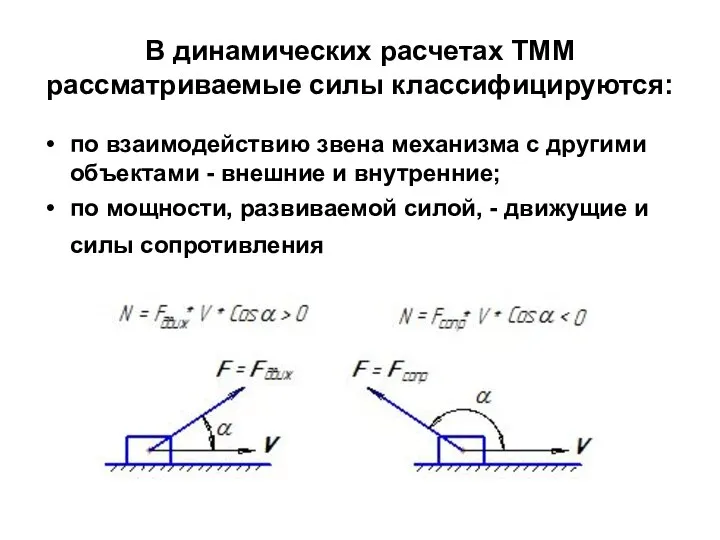
- 22. В динамических расчетах ТММ рассматриваемые силы классифицируются: по взаимодействию звена механизма с другими объектами - внешние
- 23. Силовой расчет сводится к определению неизвестных сил, действующих на звенья механизма. Применяется метод кинетостатики. Метод основан
- 24. Трение в динамических расчетах
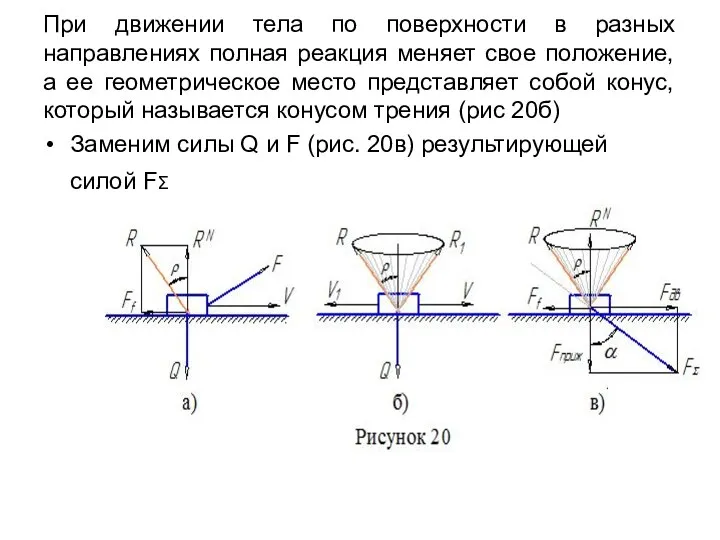
- 25. При движении тела по поверхности в разных направлениях полная реакция меняет свое положение, а ее геометрическое
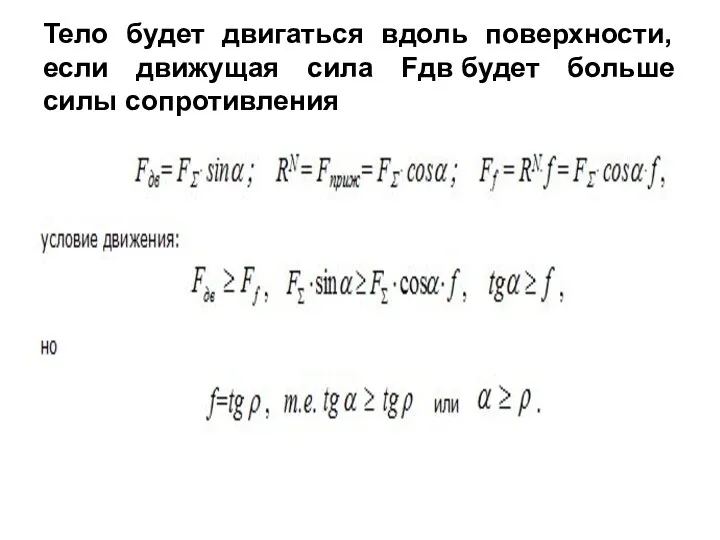
- 26. Тело будет двигаться вдоль поверхности, если движущая сила Fдв будет больше силы сопротивления
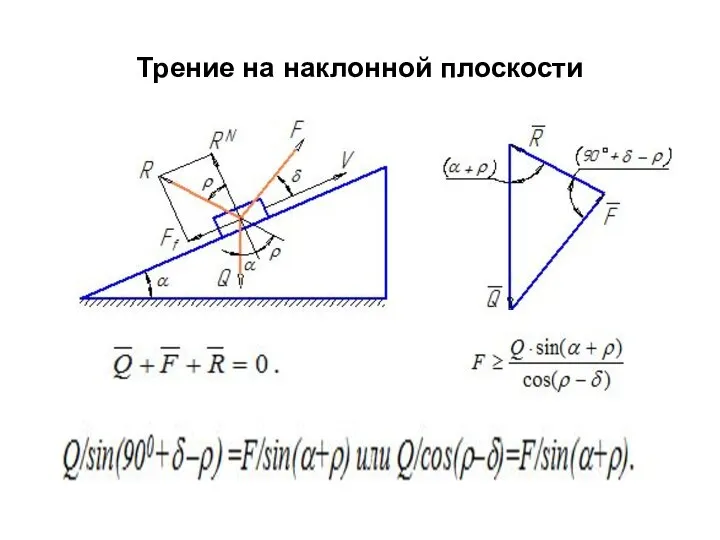
- 27. Трение на наклонной плоскости
- 29. Скачать презентацию
Слайд 3Генераторы преобразуют механическую энергию в энергию другого вида
Генераторы преобразуют механическую энергию в энергию другого вида
Слайд 4Технологические ( рабочие) машины используют механическую энергию для преобразования формы, свойств, размеров и
Технологические ( рабочие) машины используют механическую энергию для преобразования формы, свойств, размеров и
Слайд 5Транспортные (рабочие) машины используют механическую энергию для изменения положения объекта.
Транспортные (рабочие) машины используют механическую энергию для изменения положения объекта.
Слайд 6Машинный агрегат - развитое машинное устройство, состоящее из двигателя, передаточных механизмов и
Машинный агрегат - развитое машинное устройство, состоящее из двигателя, передаточных механизмов и
Слайд 7Шатун поршневого двигателя – звено из нескольких деталей.
Шатун поршневого двигателя – звено из нескольких деталей.
Слайд 8Кинематическая схема – это условное изображение звеньев и всего механизма, выполненное строго
Кинематическая схема – это условное изображение звеньев и всего механизма, выполненное строго
Слайд 9Обозначение:
AB – истинный размер звена в метрах
AB – отрезок, изображающий звено АВ
Обозначение: AB – истинный размер звена в метрах AB – отрезок, изображающий звено АВ
Слайд 10Виды звеньев:
кривошип – звено, совершающее вращательное движение вокруг неподвижной оси и делающее при
Виды звеньев:
кривошип – звено, совершающее вращательное движение вокруг неподвижной оси и делающее при
Слайд 11Кинематические пары, цепи, механизмы.
Кинематическая пара - подвижное соединение двух звеньев. Подразделяются
Кинематические пары, цепи, механизмы.
Кинематическая пара - подвижное соединение двух звеньев. Подразделяются
Слайд 12Кинематическая цепь – это сочетание звеньев (входных – заданных и выходных - искомых),
Кинематическая цепь – это сочетание звеньев (входных – заданных и выходных - искомых),
Слайд 13Виды механизмов:
механизмы двигателей и преобразователей;
передаточные механизмы;
исполнительные механизмы;
механизмы управления, контроля и регулирования;
механизмы подачи,
Виды механизмов:
механизмы двигателей и преобразователей;
передаточные механизмы;
исполнительные механизмы;
механизмы управления, контроля и регулирования;
механизмы подачи,
Слайд 14Структурный анализ и синтез механизмов. Определение числа степеней свободы кинематической цепи.
Число входных
Структурный анализ и синтез механизмов. Определение числа степеней свободы кинематической цепи.
Число входных
Слайд 15Число степеней свободы кинематической цепи определяется как разность общего числа степенeй свободы
Число степеней свободы кинематической цепи определяется как разность общего числа степенeй свободы
Слайд 16Число связей определяется как сумма произведений класса звена S на число звеньев
Число связей определяется как сумма произведений класса звена S на число звеньев
Слайд 17Для плоскости (плоского механизма) последняя формула запишется:
W=3k–p4–2p5–3 или
W=3n–2p5–p4, где n = k
Для плоскости (плоского механизма) последняя формула запишется:
W=3k–p4–2p5–3 или
W=3n–2p5–p4, где n = k
Слайд 18Пример структурного анализа плоского механизма
(W=3⋅n' - 2⋅p5 - p4=3⋅5 - 2⋅7 - 0=1 )
Пример структурного анализа плоского механизма
(W=3⋅n' - 2⋅p5 - p4=3⋅5 - 2⋅7 - 0=1 )
Слайд 19Кинематический анализ (графический, графоаналитический - метод планов скоростей и ускорений - и
Кинематический анализ (графический, графоаналитический - метод планов скоростей и ускорений - и
Слайд 20Построение диаграммы перемещений
Построение диаграммы перемещений
Слайд 21Динамика механизмов и машин. Задачи динамики
изучение сил, действующих на звенья механизма, и определение неизвестных
Динамика механизмов и машин. Задачи динамики
изучение сил, действующих на звенья механизма, и определение неизвестных
Слайд 22В динамических расчетах ТММ рассматриваемые силы классифицируются:
по взаимодействию звена механизма с другими
В динамических расчетах ТММ рассматриваемые силы классифицируются:
по взаимодействию звена механизма с другими
Слайд 23Силовой расчет сводится к определению неизвестных сил, действующих на звенья механизма.
Применяется метод
Силовой расчет сводится к определению неизвестных сил, действующих на звенья механизма.
Применяется метод
Слайд 24Трение в динамических расчетах
Трение в динамических расчетах
Слайд 25При движении тела по поверхности в разных направлениях полная реакция меняет свое
При движении тела по поверхности в разных направлениях полная реакция меняет свое
Слайд 26Тело будет двигаться вдоль поверхности, если движущая сила Fдв будет больше силы сопротивления
Тело будет двигаться вдоль поверхности, если движущая сила Fдв будет больше силы сопротивления
Слайд 27Трение на наклонной плоскости
Трение на наклонной плоскости
 Решение задач по кинематики
Решение задач по кинематики Тормозная система
Тормозная система Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6
Второе начало термодинамики. Принцип действия тепловой машины и ее КПД. Лекция 6 Применение аккумуляторов. 8 класс
Применение аккумуляторов. 8 класс Планета Воды
Планета Воды Применение полярных координат для определения местоположения материальной точки
Применение полярных координат для определения местоположения материальной точки Теоретическая механика
Теоретическая механика Внутренняя энергия макроскопической системы. Тепловое равновесие
Внутренняя энергия макроскопической системы. Тепловое равновесие Мгновенное превращение воды в лед
Мгновенное превращение воды в лед Кристаллы. Образование кристаллов
Кристаллы. Образование кристаллов Магнитное поле
Магнитное поле Оптические датчики тока и напряжения
Оптические датчики тока и напряжения Механическое движение
Механическое движение Валы и опоры. Классификация муфты
Валы и опоры. Классификация муфты Флот начала XX века
Флот начала XX века pril_4
pril_4 Работа и мощность. Решение задач
Работа и мощность. Решение задач Резьбовые соединения
Резьбовые соединения Тепловые явления
Тепловые явления Кинематика
Кинематика Физика и якутский фольклор
Физика и якутский фольклор Тела, вещества, частицы. Твердые, жидкие и газообразные
Тела, вещества, частицы. Твердые, жидкие и газообразные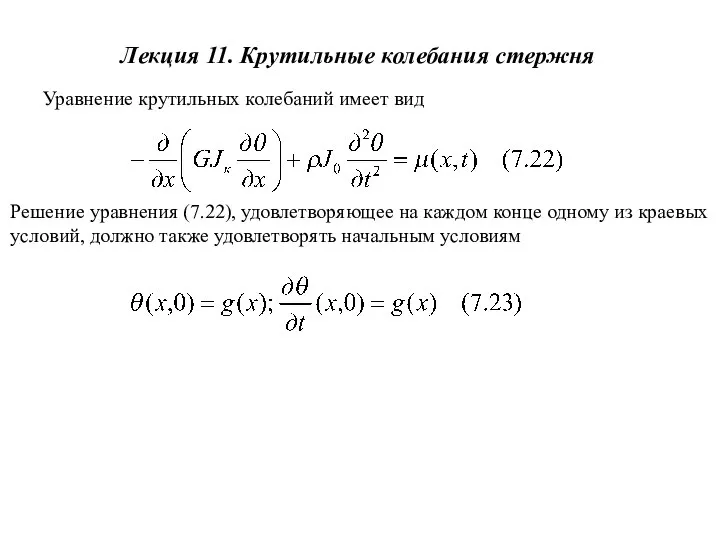 Лекция 11. Крутильные колебания стержня
Лекция 11. Крутильные колебания стержня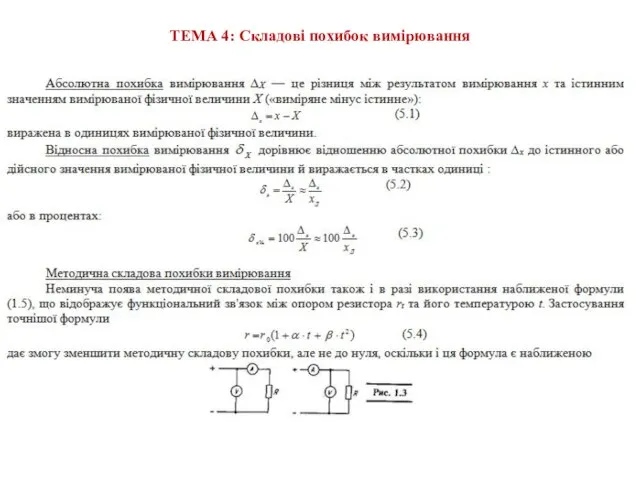 Складові похибок вимірювання. Тема 4
Складові похибок вимірювання. Тема 4 Валоповоротное устройство турбины
Валоповоротное устройство турбины Сила. Маса. Другий та третій закони Ньютона
Сила. Маса. Другий та третій закони Ньютона Баллистика. Повторение. Равномерное движение
Баллистика. Повторение. Равномерное движение Презентация на тему Физика в космосе
Презентация на тему Физика в космосе