- Проектирование системы управления с повторяющими шагами

Содержание
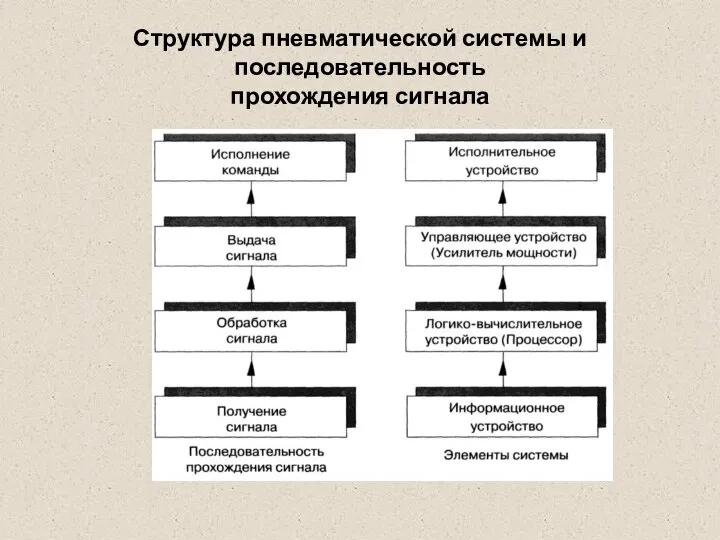
- 2. Структура пневматической системы и последовательность прохождения сигнала
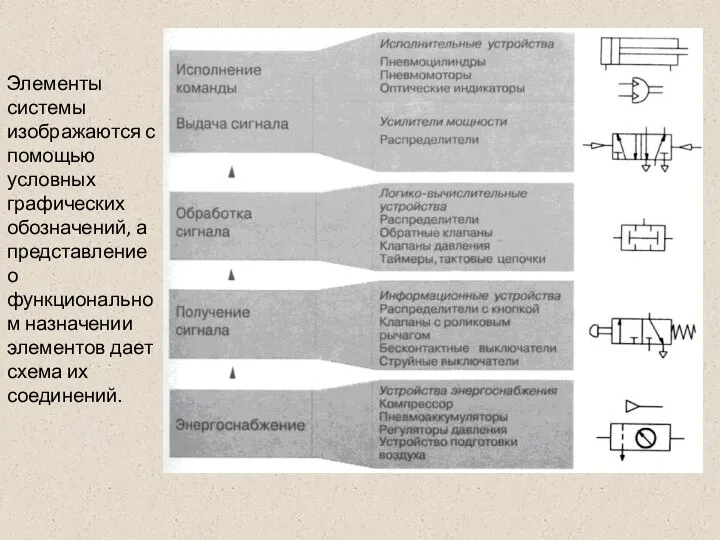
- 3. Элементы системы изображаются с помощью условных графических обозначений, а представление о функциональном назначении элементов дает схема
- 4. Принципиальная схема пневматической системы управления
- 5. Построение диаграммы (циклограммы) приводов Входными сигналами в пневмосистемах могут быть сигналы от конечных выключателей, датчиков, органов
- 6. Под шагом понимают процесс смены одного контролируемого датчиком положения исполнительного механизма на другое. Число шагов, необходимых
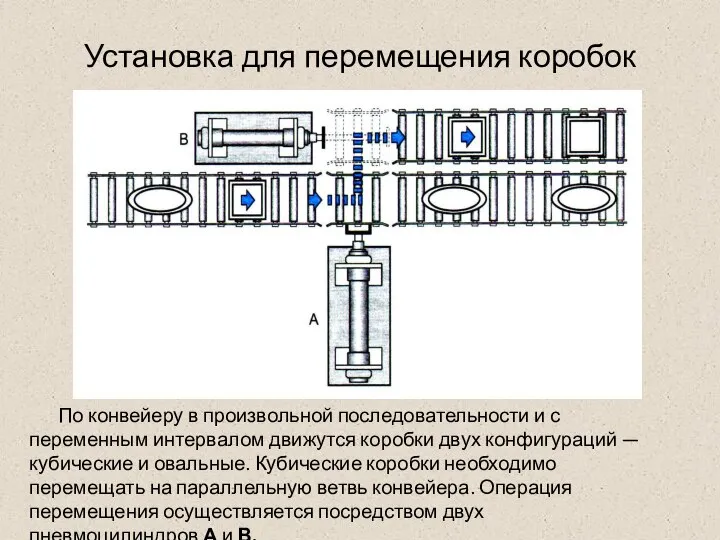
- 7. Установка для перемещения коробок По конвейеру в произвольной последовательности и с переменным интервалом движутся коробки двух
- 8. Когда кубическая коробка оказывается на транспортере (смещаемой секции конвейера), оператор кратковременно нажимает на пусковую пневмокнопку. При
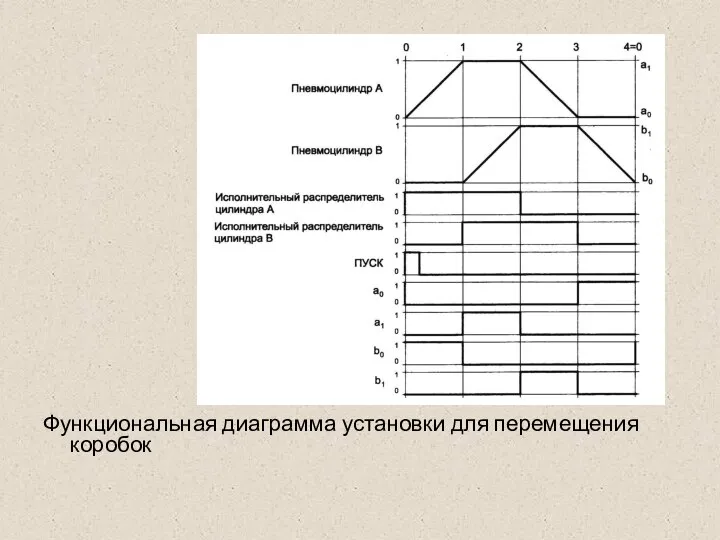
- 9. Функциональная диаграмма установки для перемещения коробок
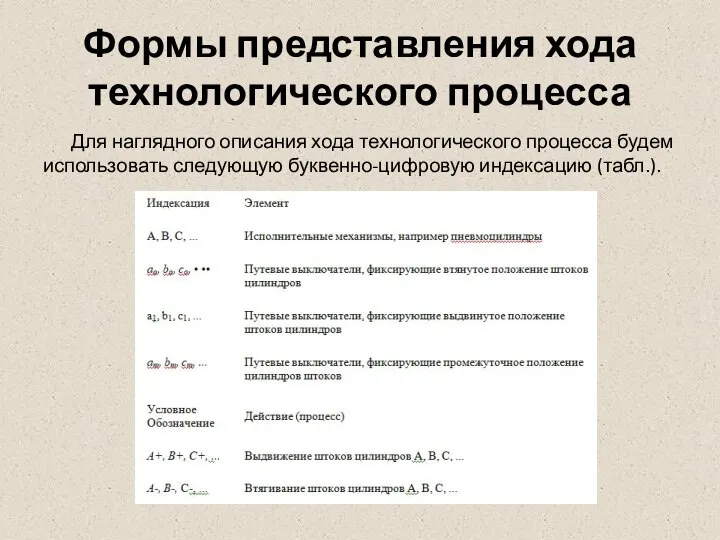
- 10. Формы представления хода технологического процесса Для наглядного описания хода технологического процесса будем использовать следующую буквенно-цифровую индексацию
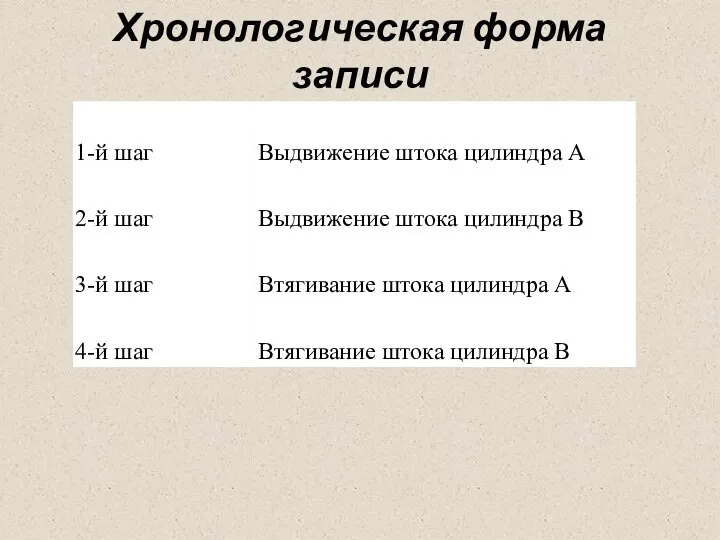
- 11. Хронологическая форма записи
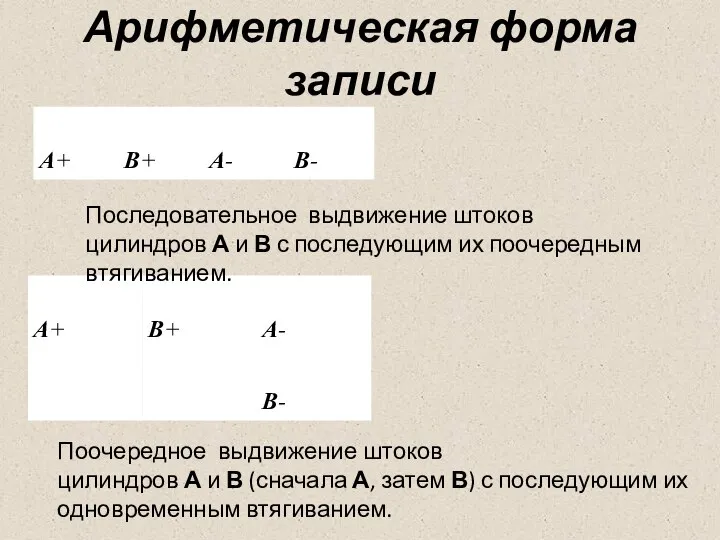
- 12. Арифметическая форма записи Поочередное выдвижение штоков цилиндров А и В (сначала А, затем В) с последующим
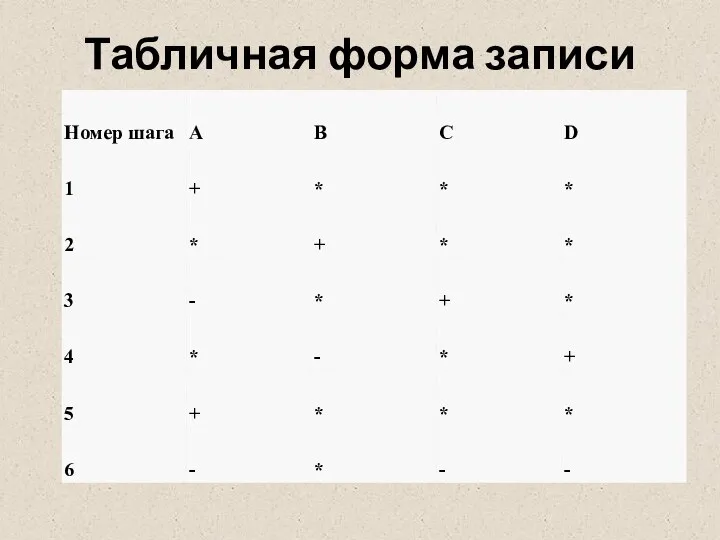
- 13. Табличная форма записи
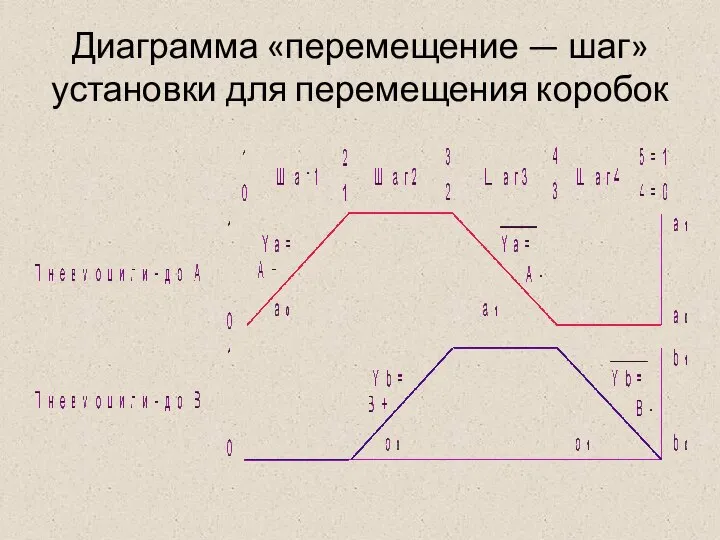
- 14. Диаграмма «перемещение — шаг» установки для перемещения коробок
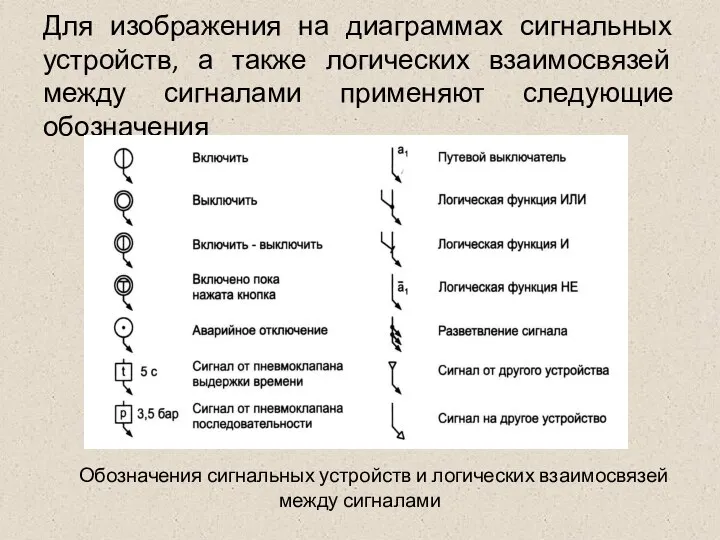
- 15. Для изображения на диаграммах сигнальных устройств, а также логических взаимосвязей между сигналами применяют следующие обозначения Обозначения
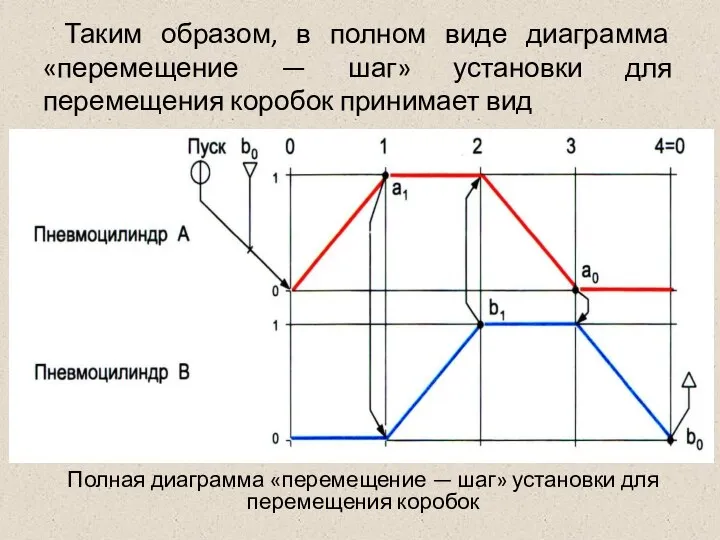
- 16. Таким образом, в полном виде диаграмма «перемещение — шаг» установки для перемещения коробок принимает вид Полная
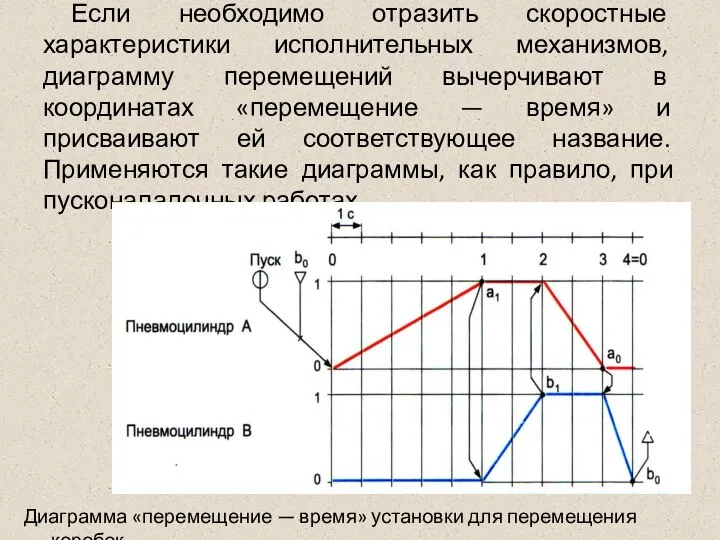
- 17. Если необходимо отразить скоростные характеристики исполнительных механизмов, диаграмму перемещений вычерчивают в координатах «перемещение — время» и
- 18. Методы проектирования пневматических САУ Проектирование циклических пневматических систем представляет собой комплекс работ, связанных с переходом от
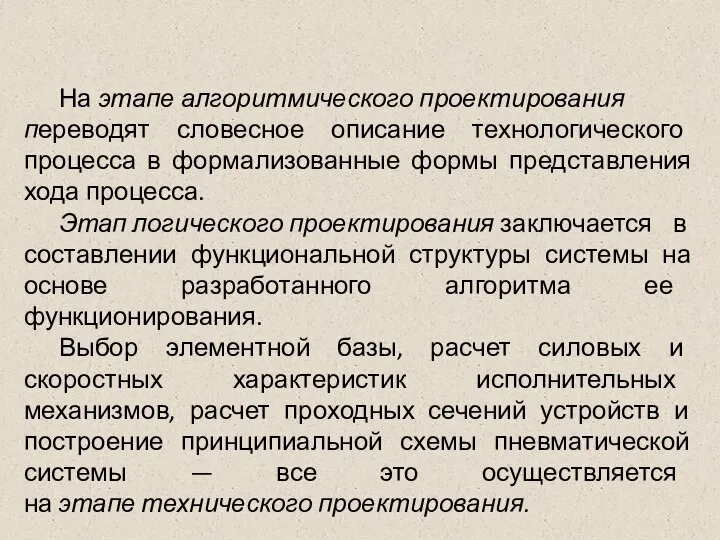
- 19. На этапе алгоритмического проектирования переводят словесное описание технологического процесса в формализованные формы представления хода процесса. Этап
- 20. Метод составления логических уравнений Пользуясь диаграммой «перемещение — шаг», можно описать состояния системы управления перед выполнением
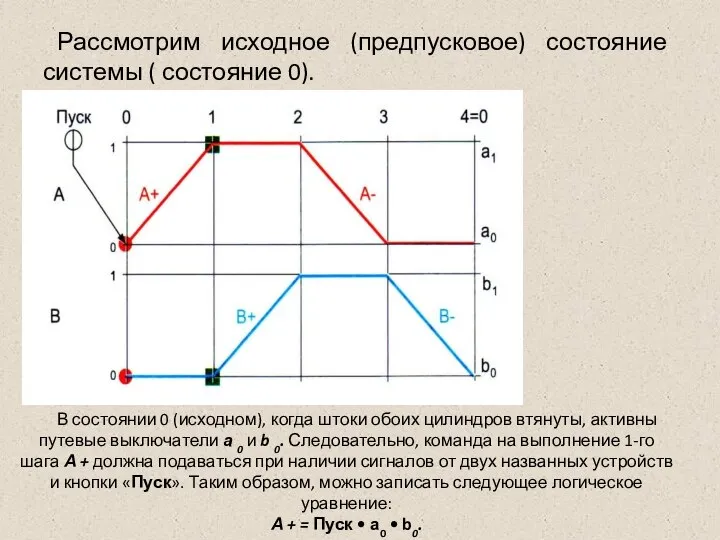
- 21. Рассмотрим исходное (предпусковое) состояние системы ( состояние 0). В состоянии 0 (исходном), когда штоки обоих цилиндров
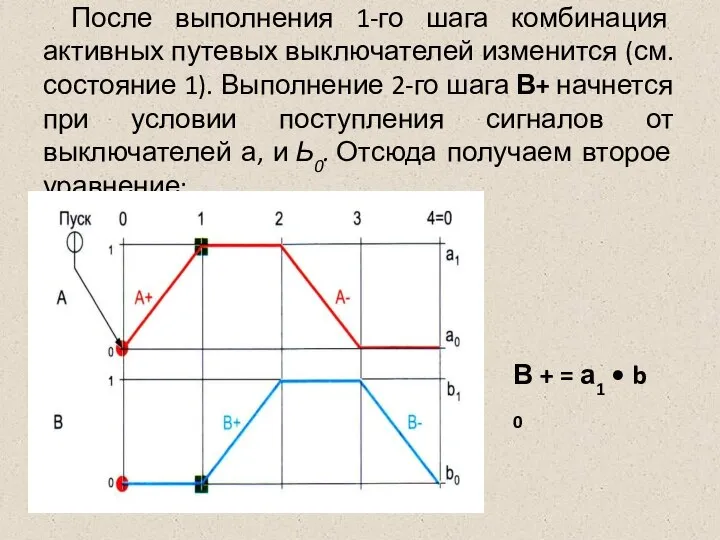
- 22. После выполнения 1-го шага комбинация активных путевых выключателей изменится (см. состояние 1). Выполнение 2-го шага В+
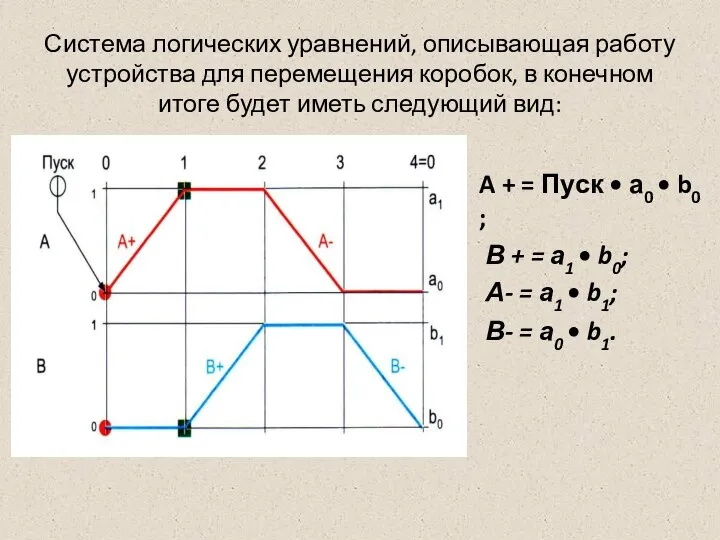
- 23. Система логических уравнений, описывающая работу устройства для перемещения коробок, в конечном итоге будет иметь следующий вид:
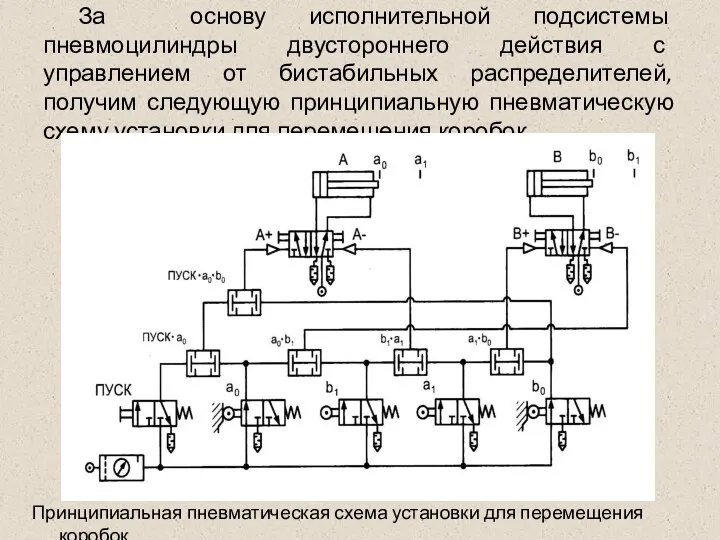
- 24. За основу исполнительной подсистемы пневмоцилиндры двустороннего действия с управлением от бистабильных распределителей, получим следующую принципиальную пневматическую
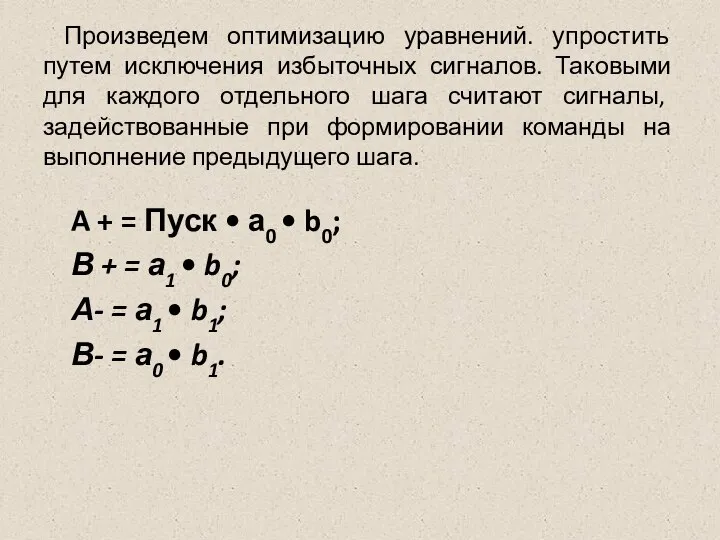
- 25. Произведем оптимизацию уравнений. упростить путем исключения избыточных сигналов. Таковыми для каждого отдельного шага считают сигналы, задействованные
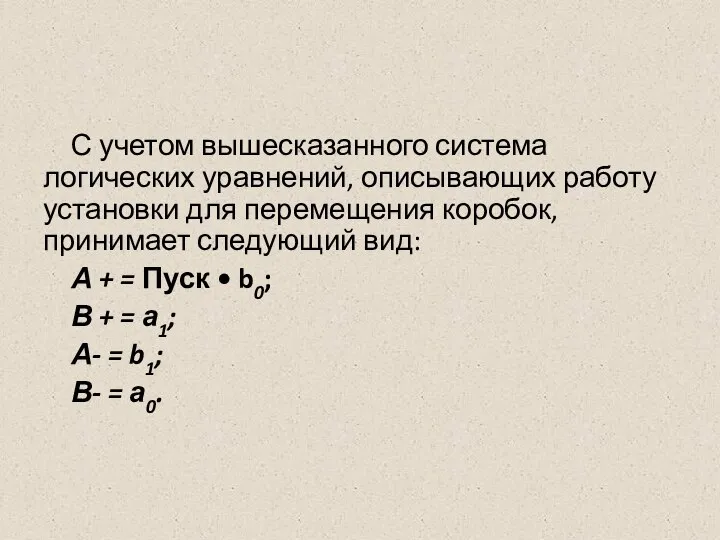
- 26. С учетом вышесказанного система логических уравнений, описывающих работу установки для перемещения коробок, принимает следующий вид: А
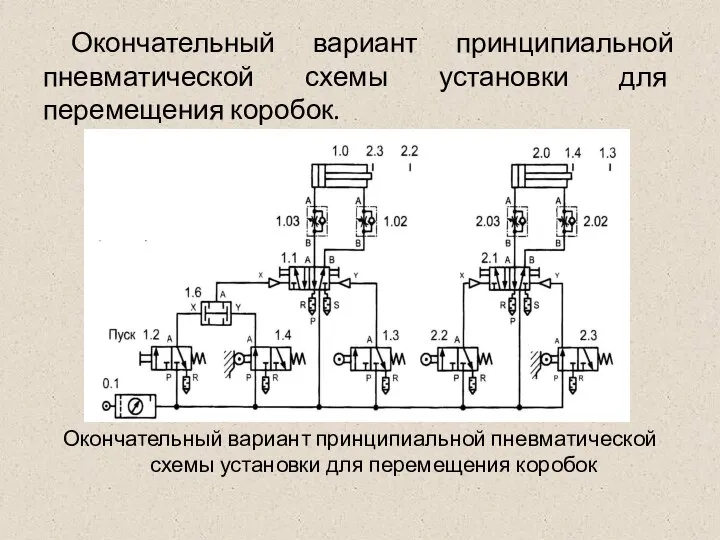
- 27. Окончательный вариант принципиальной пневматической схемы установки для перемещения коробок. Окончательный вариант принципиальной пневматической схемы установки для
- 28. Следует иметь в виду, что рассмотренный выше способ упрощения системы логических уравнений далеко не всегда применим,
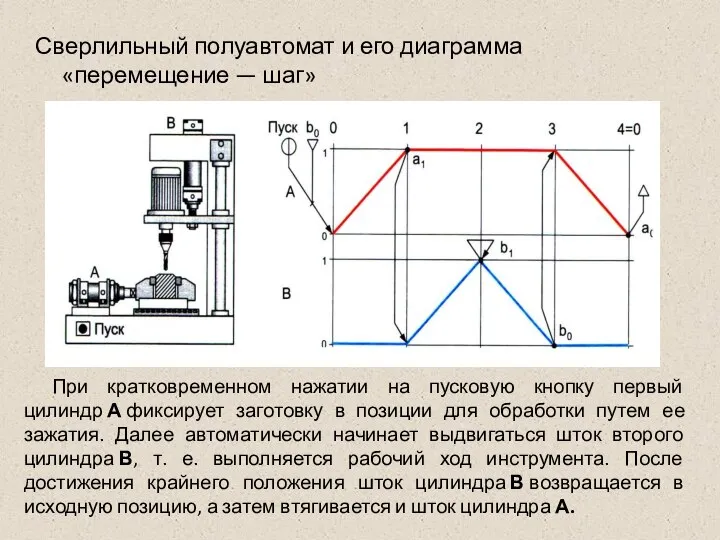
- 29. Сверлильный полуавтомат и его диаграмма «перемещение — шаг» При кратковременном нажатии на пусковую кнопку первый цилиндр
- 30. Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения) A + = Пуск • а0 •
- 31. Вводят дополнительные сигналы Х1 и Х2, в результате чего эти уравнения запишутся следующим образом: В +
- 32. Упрощение системы уравнений, содержащей совпадающие шаги, следует проводить только после дополнения правых частей соответствующих уравнений
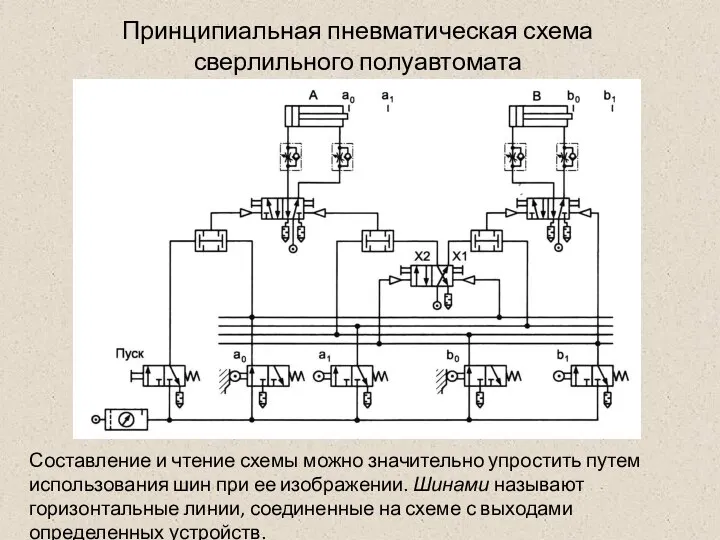
- 33. Принципиальная пневматическая схема сверлильного полуавтомата Составление и чтение схемы можно значительно упростить путем использования шин при
- 35. Скачать презентацию
Слайд 3Элементы системы изображаются с помощью условных графических обозначений, а представление о функциональном
Элементы системы изображаются с помощью условных графических обозначений, а представление о функциональном
Слайд 4Принципиальная схема пневматической системы управления
Принципиальная схема пневматической системы управления

Слайд 5Построение диаграммы (циклограммы) приводов
Входными сигналами в пневмосистемах могут быть сигналы от конечных
Построение диаграммы (циклограммы) приводов
Входными сигналами в пневмосистемах могут быть сигналы от конечных
Слайд 6Под шагом понимают процесс смены одного контролируемого датчиком положения исполнительного механизма на другое.
Число
Под шагом понимают процесс смены одного контролируемого датчиком положения исполнительного механизма на другое. Число
Слайд 7Установка для перемещения коробок
По конвейеру в произвольной последовательности и с переменным интервалом
Установка для перемещения коробок
По конвейеру в произвольной последовательности и с переменным интервалом
Слайд 8Когда кубическая коробка оказывается на транспортере (смещаемой секции конвейера), оператор кратковременно нажимает
Когда кубическая коробка оказывается на транспортере (смещаемой секции конвейера), оператор кратковременно нажимает
Слайд 9Функциональная диаграмма установки для перемещения коробок
Функциональная диаграмма установки для перемещения коробок
Слайд 10Формы представления хода технологического процесса
Для наглядного описания хода технологического процесса будем использовать
Формы представления хода технологического процесса
Для наглядного описания хода технологического процесса будем использовать
Слайд 11Хронологическая форма записи
Хронологическая форма записи
Слайд 12Арифметическая форма записи
Поочередное выдвижение штоков цилиндров А и В (сначала А, затем В) с последующим их одновременным втягиванием.
Последовательное
Арифметическая форма записи
Поочередное выдвижение штоков цилиндров А и В (сначала А, затем В) с последующим их одновременным втягиванием.
Последовательное
Слайд 13Табличная форма записи
Табличная форма записи
Слайд 14Диаграмма «перемещение — шаг» установки для перемещения коробок
Диаграмма «перемещение — шаг» установки для перемещения коробок
Слайд 15Для изображения на диаграммах сигнальных устройств, а также логических взаимосвязей между сигналами
Для изображения на диаграммах сигнальных устройств, а также логических взаимосвязей между сигналами
Слайд 16Таким образом, в полном виде диаграмма «перемещение — шаг» установки для перемещения
Таким образом, в полном виде диаграмма «перемещение — шаг» установки для перемещения
Слайд 17Если необходимо отразить скоростные характеристики исполнительных механизмов, диаграмму перемещений вычерчивают в координатах
Если необходимо отразить скоростные характеристики исполнительных механизмов, диаграмму перемещений вычерчивают в координатах
Слайд 18Методы проектирования пневматических САУ
Проектирование циклических пневматических систем представляет собой комплекс работ, связанных
Методы проектирования пневматических САУ
Проектирование циклических пневматических систем представляет собой комплекс работ, связанных
Слайд 19На этапе алгоритмического проектирования переводят словесное описание технологического процесса в формализованные формы представления хода процесса.
Этап логического проектирования заключается
На этапе алгоритмического проектирования переводят словесное описание технологического процесса в формализованные формы представления хода процесса.
Этап логического проектирования заключается
Слайд 20Метод составления логических уравнений
Пользуясь диаграммой «перемещение — шаг», можно описать состояния системы
Метод составления логических уравнений
Пользуясь диаграммой «перемещение — шаг», можно описать состояния системы
Слайд 21Рассмотрим исходное (предпусковое) состояние системы ( состояние 0).
В состоянии 0 (исходном), когда
Рассмотрим исходное (предпусковое) состояние системы ( состояние 0).
В состоянии 0 (исходном), когда
Слайд 22После выполнения 1-го шага комбинация активных путевых выключателей изменится (см. состояние 1).
После выполнения 1-го шага комбинация активных путевых выключателей изменится (см. состояние 1).
Слайд 23Система логических уравнений, описывающая работу устройства для перемещения коробок, в конечном итоге
Система логических уравнений, описывающая работу устройства для перемещения коробок, в конечном итоге
Слайд 24За основу исполнительной подсистемы пневмоцилиндры двустороннего действия с управлением от бистабильных распределителей,
За основу исполнительной подсистемы пневмоцилиндры двустороннего действия с управлением от бистабильных распределителей,
Слайд 25Произведем оптимизацию уравнений. упростить путем исключения избыточных сигналов. Таковыми для каждого отдельного
Произведем оптимизацию уравнений. упростить путем исключения избыточных сигналов. Таковыми для каждого отдельного
Слайд 26С учетом вышесказанного система логических уравнений, описывающих работу установки для перемещения коробок,
С учетом вышесказанного система логических уравнений, описывающих работу установки для перемещения коробок,
Слайд 27Окончательный вариант принципиальной пневматической схемы установки для перемещения коробок.
Окончательный вариант принципиальной пневматической
Окончательный вариант принципиальной пневматической схемы установки для перемещения коробок.
Окончательный вариант принципиальной пневматической
Слайд 28Следует иметь в виду, что рассмотренный выше способ упрощения системы логических уравнений
Следует иметь в виду, что рассмотренный выше способ упрощения системы логических уравнений
Слайд 29Сверлильный полуавтомат и его диаграмма «перемещение — шаг»
При кратковременном нажатии на пусковую
Сверлильный полуавтомат и его диаграмма «перемещение — шаг»
При кратковременном нажатии на пусковую
Слайд 30Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения)
A + = Пуск • а0 • b0;
B + = а1 • b0;
B - = а1 • b1;
А- = a1 • b0.
Уравнения, описывающие работу станка-полуавтомата, будут иметь вид (без упрощения)
A + = Пуск • а0 • b0;
B + = а1 • b0;
B - = а1 • b1;
А- = a1 • b0.
Слайд 31Вводят дополнительные сигналы Х1 и Х2, в результате чего эти уравнения запишутся следующим образом:
В + = а1 • b0 • Х1;
A- = а1 • b0 • Х2.
Два дополнительных сигнала Х1 и Х2 можно
Вводят дополнительные сигналы Х1 и Х2, в результате чего эти уравнения запишутся следующим образом:
В + = а1 • b0 • Х1;
A- = а1 • b0 • Х2.
Два дополнительных сигнала Х1 и Х2 можно
Слайд 32Упрощение системы уравнений, содержащей совпадающие шаги, следует проводить только после дополнения правых
Упрощение системы уравнений, содержащей совпадающие шаги, следует проводить только после дополнения правых
Слайд 33Принципиальная пневматическая схема сверлильного полуавтомата
Составление и чтение схемы можно значительно упростить путем
Принципиальная пневматическая схема сверлильного полуавтомата
Составление и чтение схемы можно значительно упростить путем
 Сила тока
Сила тока Первый закон термодинамики
Первый закон термодинамики Рефрактометры в квалиметрии молочной промышленности
Рефрактометры в квалиметрии молочной промышленности Величины, характеризующие колебания. Физика. 9 класс
Величины, характеризующие колебания. Физика. 9 класс Общие сведения о системах первичного электроснабжения РЭС
Общие сведения о системах первичного электроснабжения РЭС Амплитудная цилиндрическая дифракционная линза. Расчет, изготовление с помощью фотолитографии и жидкостного травления
Амплитудная цилиндрическая дифракционная линза. Расчет, изготовление с помощью фотолитографии и жидкостного травления Изменение в агрегатных состояний вещества
Изменение в агрегатных состояний вещества Статика. Динамика
Статика. Динамика Температура и ее измерение
Температура и ее измерение Надпровідність
Надпровідність Зависимость спектральной плотности интенсивности излучения от частоты
Зависимость спектральной плотности интенсивности излучения от частоты Пример планового техобслуживания автомобиля
Пример планового техобслуживания автомобиля Насыщенный и ненасыщенный пар. Влажность воздуха
Насыщенный и ненасыщенный пар. Влажность воздуха Видатні вчені фізики. (8 клас)
Видатні вчені фізики. (8 клас) Индивидуальный проект. Использование энергии магнитного поля
Индивидуальный проект. Использование энергии магнитного поля Проведение виртуальных лабораторных работ по физике
Проведение виртуальных лабораторных работ по физике Презентация на тему Давление твёрдых тел, жидкостей и газов
Презентация на тему Давление твёрдых тел, жидкостей и газов  Презентация на тему Внутренняя энергия (10 класс)
Презентация на тему Внутренняя энергия (10 класс)  Электроемкость.Конденсаторы
Электроемкость.Конденсаторы Обзор способов получения диоксида титана
Обзор способов получения диоксида титана Механическая работа. Единицы работы
Механическая работа. Единицы работы Дифракция света
Дифракция света Основные понятия, единицы термины в области радиационной безопасности
Основные понятия, единицы термины в области радиационной безопасности Расчет на прочность при кручении
Расчет на прочность при кручении Направление тока и направление линий его магнитного поля
Направление тока и направление линий его магнитного поля Закон Джоуля-Ленца
Закон Джоуля-Ленца Волосяной гигрометр
Волосяной гигрометр Механическое движение
Механическое движение