- Решение задач динамики машин с учетом сил упругости

Содержание
- 2. Для решения задач динамики с учетом упругости звеньев прибегают к приближенному решению, когда машину или исследуемый
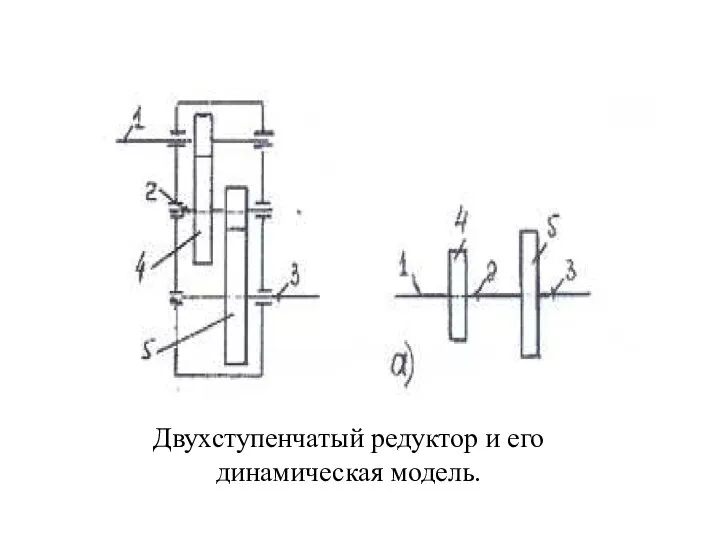
- 3. Двухступенчатый редуктор и его динамическая модель.
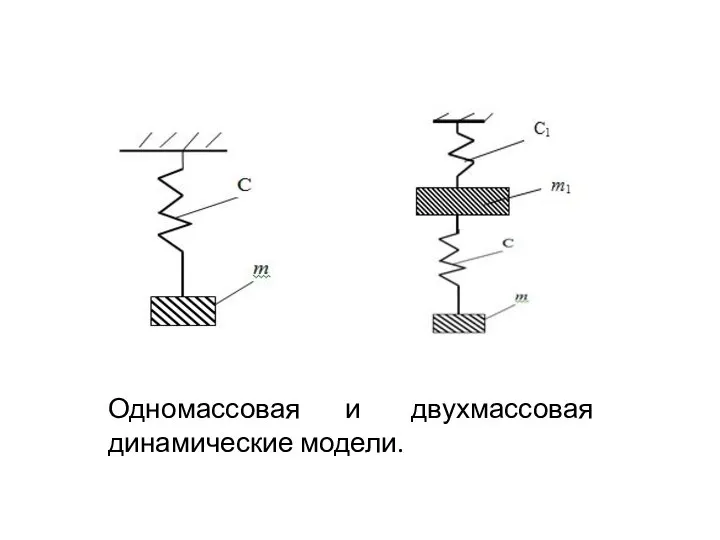
- 4. Одномассовая и двухмассовая динамические модели.
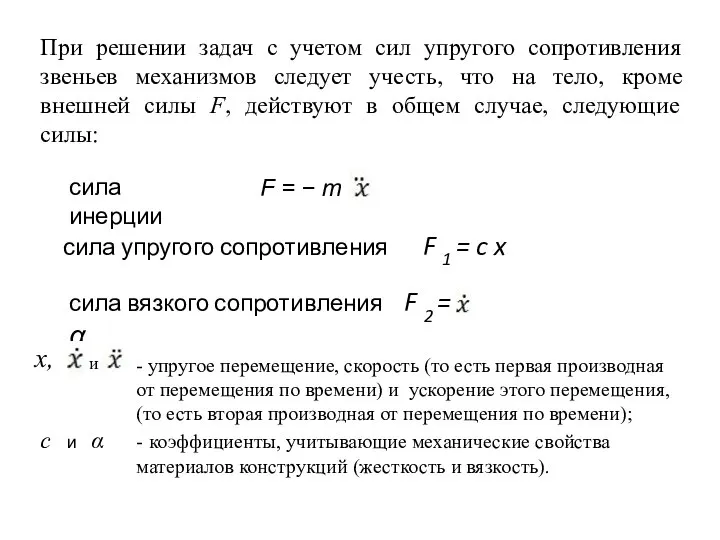
- 5. При решении задач с учетом сил упругого сопротивления звеньев механизмов следует учесть, что на тело, кроме
- 6. Учитывая изложенные выше зависимости и принятые допущения, получаем уравнение движения масс с учетом сил упругости или,
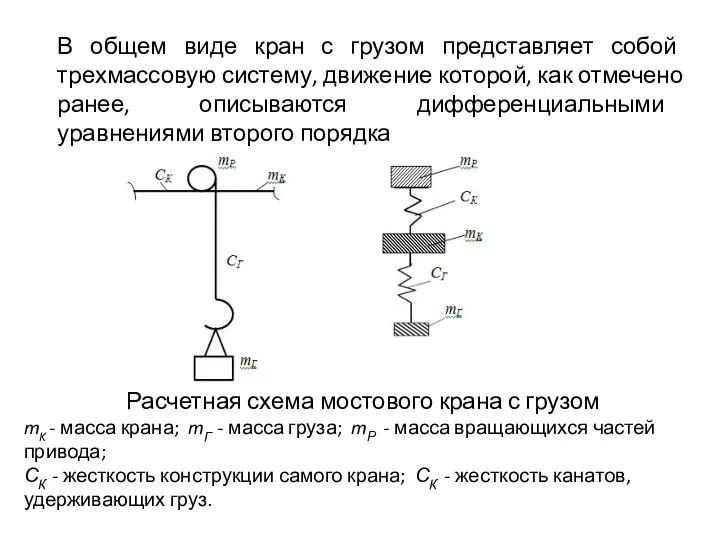
- 7. В общем виде кран с грузом представляет собой трехмассовую систему, движение которой, как отмечено ранее, описываются
- 8. Динамическая нагрузка при подъеме груза В процессе подъема возможны два варианта: подъем «с веса» и подъем
- 9. В начальный момент подъема нагрузка на грузозахватное устройство РГЗ составит РГЗ = QГ + Рдин ≥
- 10. Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании, канаты провисают, и в
- 11. Динамическая нагрузка, также как в первом случае, зависит от жесткости опорной конструкции СК , но при
- 12. В первом случае – подъем «с веса» динамическая деформация самого крана мало отличается от статической. Поэтому
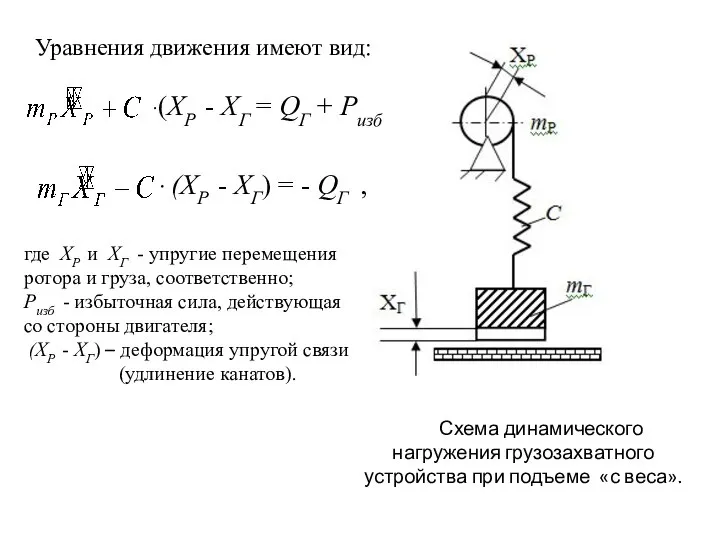
- 13. Схема динамического нагружения грузозахватного устройства при подъеме «с веса». ∙(ХР - ХГ = QГ + Ризб
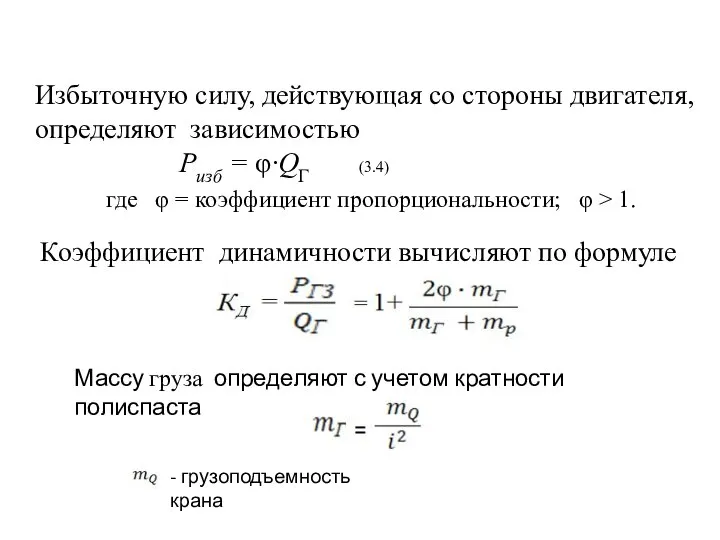
- 14. Избыточную силу, действующая со стороны двигателя, определяют зависимостью Ризб = φ∙QГ (3.4) где φ = коэффициент
- 15. При торможении опускающегося груза величину Рдин и коэффициент динамичности определяют по тем же формулам, но под
- 16. Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании, канаты провисают, нагрузка на
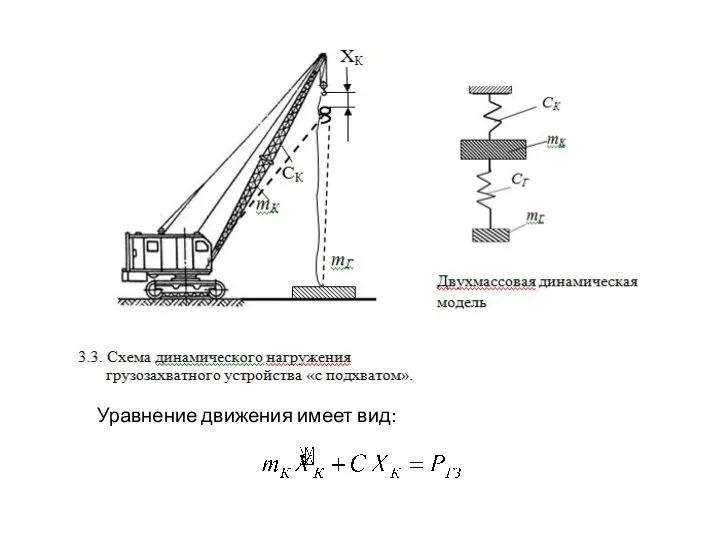
- 17. Уравнение движения имеет вид:
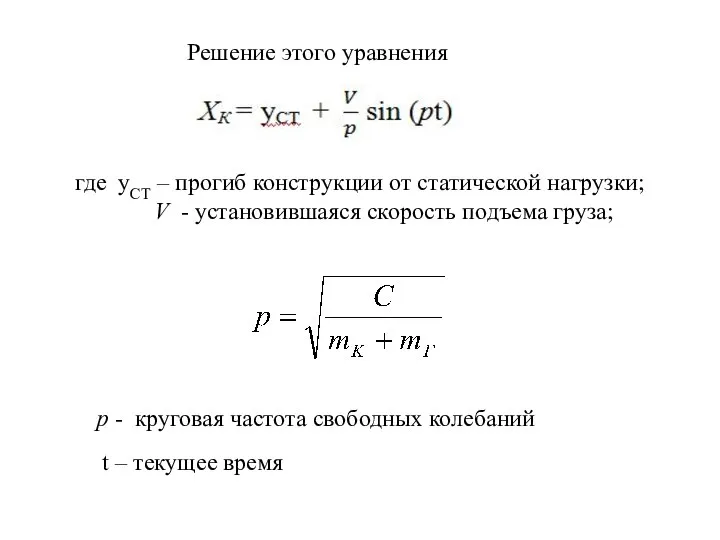
- 18. Решение этого уравнения где уСТ – прогиб конструкции от статической нагрузки; V - установившаяся скорость подъема
- 20. Скачать презентацию
Слайд 3Двухступенчатый редуктор и его динамическая модель.
Двухступенчатый редуктор и его динамическая модель.
Слайд 4Одномассовая и двухмассовая динамические модели.
Одномассовая и двухмассовая динамические модели.
Слайд 5При решении задач с учетом сил упругого сопротивления звеньев механизмов следует учесть,
При решении задач с учетом сил упругого сопротивления звеньев механизмов следует учесть,
Слайд 6Учитывая изложенные выше зависимости и принятые допущения, получаем уравнение движения масс с
Учитывая изложенные выше зависимости и принятые допущения, получаем уравнение движения масс с
Слайд 7В общем виде кран с грузом представляет собой трехмассовую систему, движение которой,
В общем виде кран с грузом представляет собой трехмассовую систему, движение которой,
Слайд 8Динамическая нагрузка при подъеме груза
В процессе подъема возможны два варианта: подъем «с
Динамическая нагрузка при подъеме груза
В процессе подъема возможны два варианта: подъем «с
Слайд 9В начальный момент подъема нагрузка на грузозахватное устройство РГЗ составит
РГЗ = QГ
В начальный момент подъема нагрузка на грузозахватное устройство РГЗ составит
РГЗ = QГ
Слайд 10Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании,
Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании,
Слайд 11Динамическая нагрузка, также как в первом случае, зависит от жесткости опорной конструкции
Динамическая нагрузка, также как в первом случае, зависит от жесткости опорной конструкции
Слайд 12В первом случае – подъем «с веса» динамическая деформация самого крана мало
В первом случае – подъем «с веса» динамическая деформация самого крана мало
Слайд 13 Схема динамического нагружения грузозахватного устройства при подъеме «с веса».
∙(ХР - ХГ
Схема динамического нагружения грузозахватного устройства при подъеме «с веса».
∙(ХР - ХГ
Слайд 14Избыточную силу, действующая со стороны двигателя, определяют зависимостью
Ризб = φ∙QГ (3.4)
где φ
Избыточную силу, действующая со стороны двигателя, определяют зависимостью
Ризб = φ∙QГ (3.4)
где φ
Слайд 15При торможении опускающегося груза величину Рдин и коэффициент динамичности определяют по тем
При торможении опускающегося груза величину Рдин и коэффициент динамичности определяют по тем
Слайд 16Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании,
Во втором случае – подъем «с подхватом» груз лежит на каком-либо основании,
Слайд 17Уравнение движения имеет вид:
Уравнение движения имеет вид:
Слайд 18Решение этого уравнения
где уСТ – прогиб конструкции от статической нагрузки;
V
Решение этого уравнения
где уСТ – прогиб конструкции от статической нагрузки;
V
 Трансформатор в физике
Трансформатор в физике Модель надёжности ветропарка с учётом погодных условий
Модель надёжности ветропарка с учётом погодных условий Критерии прочности намоточных труб при растяжении, кручении и сложном напряженном состоянии
Критерии прочности намоточных труб при растяжении, кручении и сложном напряженном состоянии Закон сохранения импульса. Законы Ньютона
Закон сохранения импульса. Законы Ньютона Дефекты в кристаллах
Дефекты в кристаллах Взаимодействие ионизирующего излучения с веществом
Взаимодействие ионизирующего излучения с веществом Сила
Сила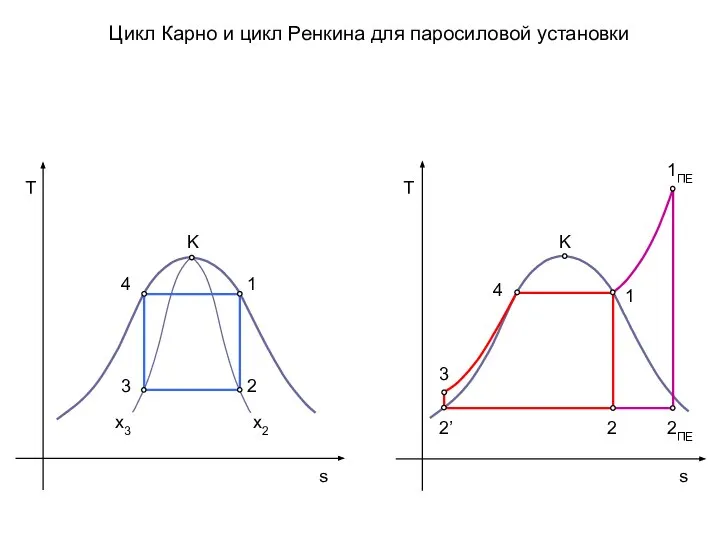 Цикл Карно и цикл Ренкина для паросиловой установки
Цикл Карно и цикл Ренкина для паросиловой установки Разработкой технологии дефектации прибора системы зажигания автомобиля ГАЗ-2752 Газель
Разработкой технологии дефектации прибора системы зажигания автомобиля ГАЗ-2752 Газель Идеальный газ. Параметры состояния газа
Идеальный газ. Параметры состояния газа Technical Service Bulletin. Модель Mighty. Замена клапана ЕГР
Technical Service Bulletin. Модель Mighty. Замена клапана ЕГР Гидравлический домкрат в быту
Гидравлический домкрат в быту Исследователи области света и цвета
Исследователи области света и цвета Солнечная энергия
Солнечная энергия Прикладная экспериментальная ядерная физика
Прикладная экспериментальная ядерная физика Потенциальная энергия заряженного тела в однородном электростатическом поле
Потенциальная энергия заряженного тела в однородном электростатическом поле Соединение резисторов звездой и треугольником. Расчёт цепей с помощью электрического потенциала
Соединение резисторов звездой и треугольником. Расчёт цепей с помощью электрического потенциала Экспериментальные методы исследования элементарных частиц (68)
Экспериментальные методы исследования элементарных частиц (68) Вторая жизнь солнечным батареям
Вторая жизнь солнечным батареям Презентация урока физики 8 класс. Тема: Агрегатные превращения веществ. Тип урока: обобщение изученного материала. Це
Презентация урока физики 8 класс. Тема: Агрегатные превращения веществ. Тип урока: обобщение изученного материала. Це Control of nonlinear dynamics of electromechanical systems
Control of nonlinear dynamics of electromechanical systems Презентация на тему Взаимодействие тел. Масса тела
Презентация на тему Взаимодействие тел. Масса тела  Инерция. Урок физики в 7 классе
Инерция. Урок физики в 7 классе Цепи синусоидального тока. Лекция 6
Цепи синусоидального тока. Лекция 6 Оптика
Оптика Повышение КПД ГТУ путём внедрения регенеративного цикла
Повышение КПД ГТУ путём внедрения регенеративного цикла Электромагнетизм. Магнитное поле проводника с током
Электромагнетизм. Магнитное поле проводника с током Нанотехнологии и Наноматериалы
Нанотехнологии и Наноматериалы