Тематика курсовых работ, предлагаемых сотрудниками кафедры и лабораторий прикладной механики и управления
- Тематика курсовых работ, предлагаемых сотрудниками кафедры и лабораторий прикладной механики и управления

Содержание
- 2. 2 Управляемые переходы в бистабильных системах и приложения Профессор Владимир Васильевич Александров [email protected] 1.Точечные и периодические
- 3. Лаборатория МОИДС vladimiralexandrov366@ hotmail.com АЛЕКСАНДРОВ ВЛАДИМИР ВАСИЛЬЕВИЧ -ЗАВ. КАФЕДРОЙ ПРИКЛАДНОЙ МЕХАНИКИ И УПРАВЛЕНИЯ Гальванический корректор –
- 4. Математическое обеспечение технологий виртуальной и дополненной реальностей Лаборатория МОИДС МГУ Панорамная система виртуальной реальности Математическое и
- 5. Профессор Болотин Юрий Владимирович [email protected] Предлагаемая тема курсовой: Навигация пешехода Детали можно обсудить в Zoom. Задача
- 6. Механические модели и интерпретация результатов биомедицинских исследований Доцент Кручинин Павел Анатольевич +7 905 7036017 [email protected] [email protected]
- 7. Спектральный анализ показаний силомоментных датчиков АПК «Многофункциональное кресло» (МГППУ, МГПУ, ИППИ, МГУ) Левый подлокотник Сиденье Правое
- 8. Механические модели и интерпретация результатов биомедицинских исследований Кручинина Анна Павовна, ассистент +7 90+7 903+7 903 +7
- 10. Скачать презентацию
Слайд 22
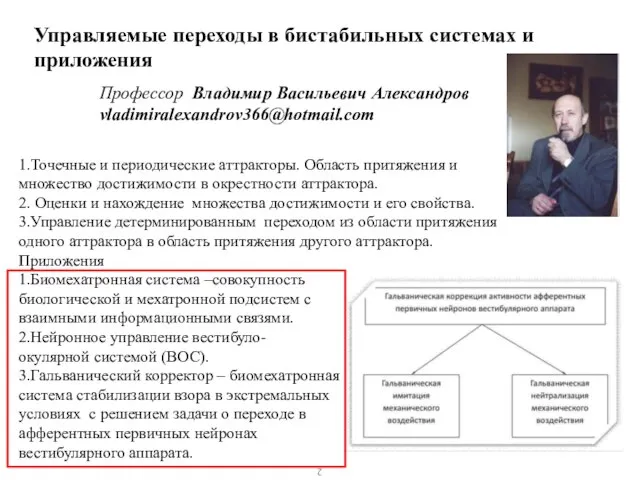
Управляемые переходы в бистабильных системах и приложения
Профессор Владимир Васильевич Александров [email protected]
1.Точечные
2
Управляемые переходы в бистабильных системах и приложения
Профессор Владимир Васильевич Александров [email protected]
1.Точечные
Слайд 3 Лаборатория МОИДС
vladimiralexandrov366@ hotmail.com АЛЕКСАНДРОВ ВЛАДИМИР ВАСИЛЬЕВИЧ -ЗАВ. КАФЕДРОЙ ПРИКЛАДНОЙ МЕХАНИКИ
Лаборатория МОИДС
vladimiralexandrov366@ hotmail.com АЛЕКСАНДРОВ ВЛАДИМИР ВАСИЛЬЕВИЧ -ЗАВ. КАФЕДРОЙ ПРИКЛАДНОЙ МЕХАНИКИ

Слайд 4Математическое обеспечение технологий виртуальной и дополненной реальностей
Лаборатория МОИДС МГУ
Панорамная система виртуальной
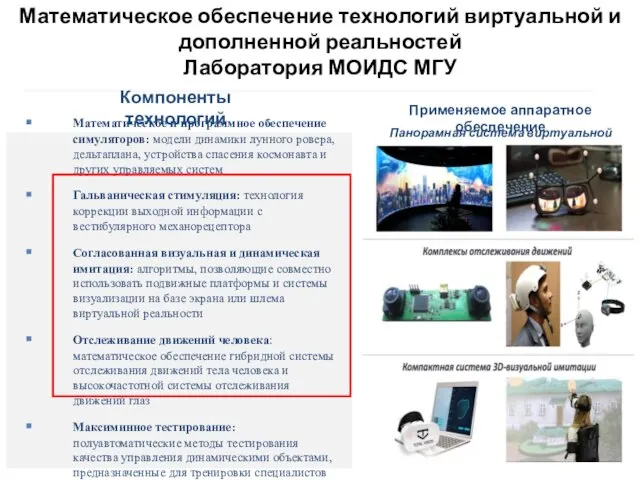
Математическое обеспечение технологий виртуальной и дополненной реальностей
Лаборатория МОИДС МГУ
Панорамная система виртуальной
Слайд 5Профессор Болотин Юрий Владимирович [email protected]
Предлагаемая тема курсовой: Навигация пешехода
Детали можно обсудить в
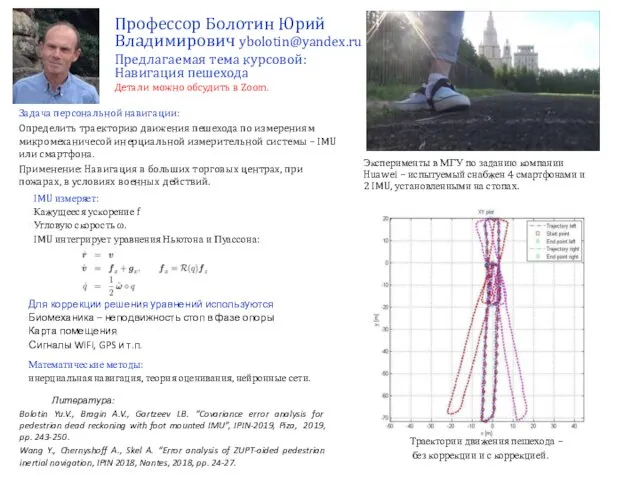
Профессор Болотин Юрий Владимирович [email protected]
Предлагаемая тема курсовой: Навигация пешехода
Детали можно обсудить в
Слайд 6
Механические модели и интерпретация результатов биомедицинских исследований
Доцент Кручинин Павел Анатольевич
+7
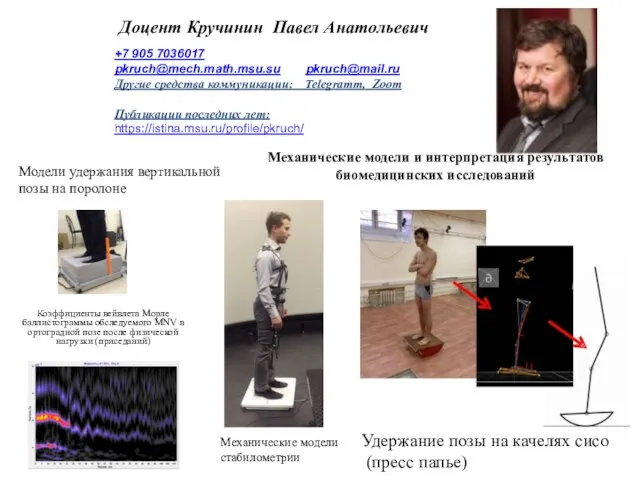
Механические модели и интерпретация результатов биомедицинских исследований
Доцент Кручинин Павел Анатольевич
+7
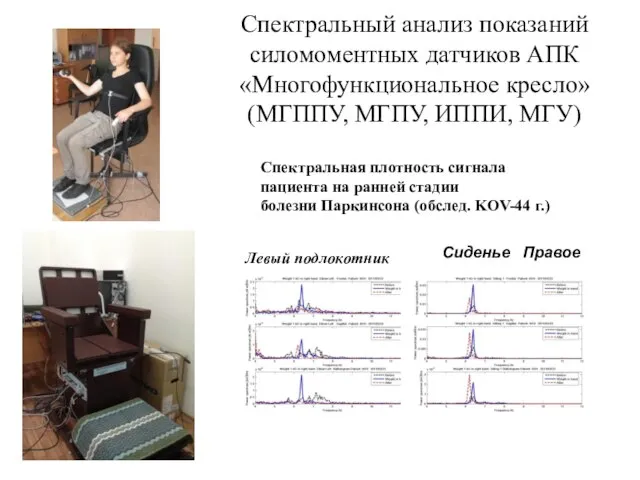
Слайд 7Спектральный анализ показаний силомоментных датчиков АПК «Многофункциональное кресло»
(МГППУ, МГПУ, ИППИ, МГУ)
Левый подлокотник
Сиденье
Правое
Спектральная
Спектральный анализ показаний силомоментных датчиков АПК «Многофункциональное кресло»
(МГППУ, МГПУ, ИППИ, МГУ)
Левый подлокотник
Сиденье
Правое
Спектральная
Слайд 8
Механические модели и интерпретация результатов биомедицинских исследований
Кручинина
Анна Павовна, ассистент
+7
Механические модели и интерпретация результатов биомедицинских исследований
Кручинина
Анна Павовна, ассистент
+7

 Фрактальная размерность проводников и полупроводников
Фрактальная размерность проводников и полупроводников Проектирование участка механической обработки детали Вал тихоходный на базе предприятия ПАО Кузнецов
Проектирование участка механической обработки детали Вал тихоходный на базе предприятия ПАО Кузнецов Состав и строение атома
Состав и строение атома Исследование возникновения и развития скольжения в поликристаллических образцах алюминия с помощью лазерной методики
Исследование возникновения и развития скольжения в поликристаллических образцах алюминия с помощью лазерной методики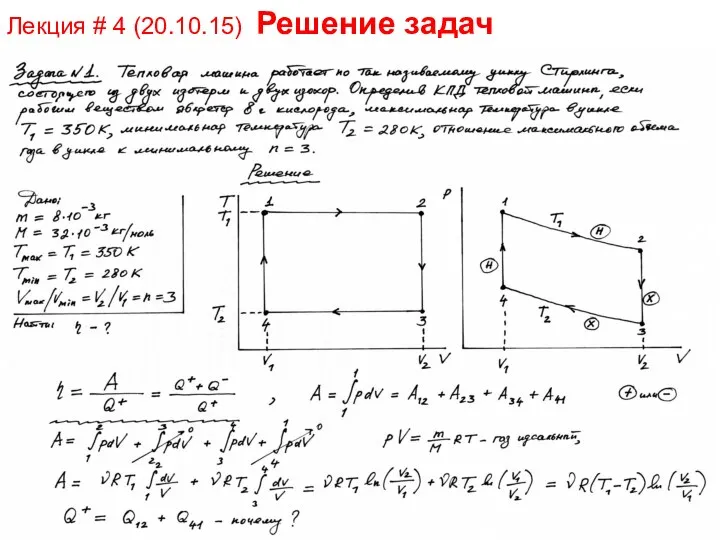 Решение задач. (Лекция 4)
Решение задач. (Лекция 4) Устройства беспроводной передачи энергии
Устройства беспроводной передачи энергии Физические принципы подъема затонувших судов
Физические принципы подъема затонувших судов Предмет физики. Основные этапы истории физики
Предмет физики. Основные этапы истории физики Презентация на тему Электромагнитные явления
Презентация на тему Электромагнитные явления  Construcţia generală a tunului cal.152 mm 2A36. Mecanismele de ochire şi de echilibrare
Construcţia generală a tunului cal.152 mm 2A36. Mecanismele de ochire şi de echilibrare Выбор линейных реакторов
Выбор линейных реакторов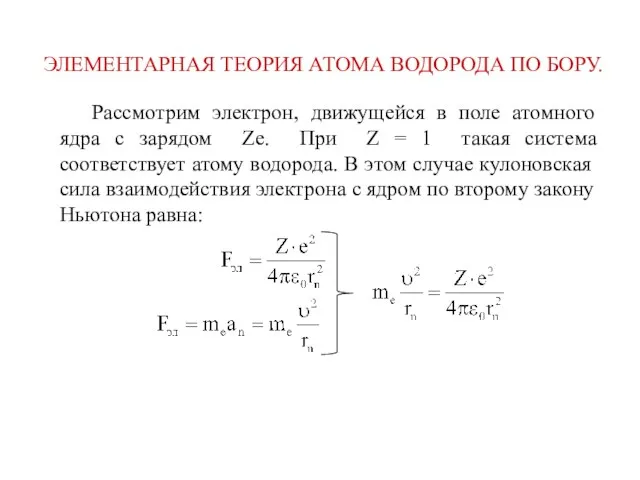 Элементарная теория атома водорода по бору
Элементарная теория атома водорода по бору Пластическая и упругая деформация
Пластическая и упругая деформация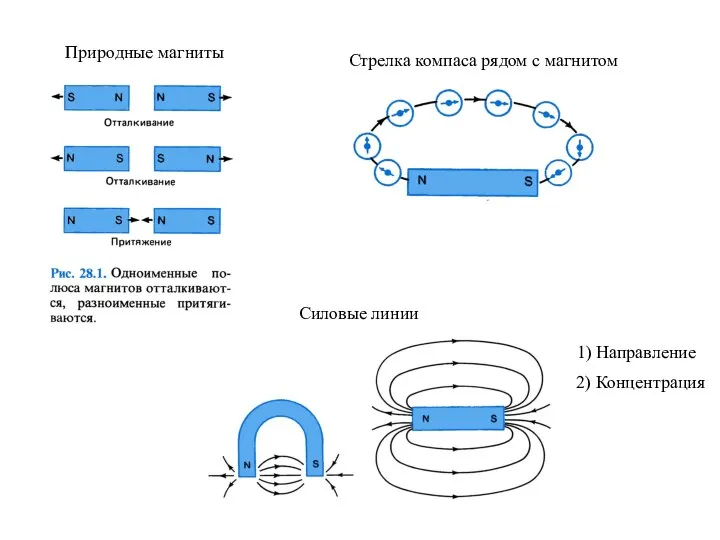 Природные магниты
Природные магниты Работа силы упругости. Потенциальная энергия упруго деформированного тела
Работа силы упругости. Потенциальная энергия упруго деформированного тела Реактивное движение
Реактивное движение Презентация на тему Амперметр
Презентация на тему Амперметр  Наноматериалы для промышленности
Наноматериалы для промышленности Роль домашнего демонстрационного физического эксперимента в формировании интереса школьников к урокам физики
Роль домашнего демонстрационного физического эксперимента в формировании интереса школьников к урокам физики Энтропия. Употребление в различных дисциплинах
Энтропия. Употребление в различных дисциплинах Резисторы. Последовательное и параллельное соединение резисторов
Резисторы. Последовательное и параллельное соединение резисторов Машины и оборудование для свайных работ. Машины для дробления, сортировки и мойки каменных материалов. Тема 5
Машины и оборудование для свайных работ. Машины для дробления, сортировки и мойки каменных материалов. Тема 5 Цилиндрические зубчатые передачи
Цилиндрические зубчатые передачи Последовательное и параллельное соединение проводников
Последовательное и параллельное соединение проводников Прямолинейное равномерное движение. Скорость движения
Прямолинейное равномерное движение. Скорость движения Паралельне з’єднання провідників. Урок 51
Паралельне з’єднання провідників. Урок 51 Электромагнитные волны
Электромагнитные волны Ускорение. Движение с постоянным ускорением. Уравнение движения. (10 класс)
Ускорение. Движение с постоянным ускорением. Уравнение движения. (10 класс)