- Теория управления. Устойчивость

Содержание
- 2. Понятие устойчивости Термин «устойчивость» используется в численных методах, механике, экономике, социологии, психологии. Во всех этих науках
- 3. Равновесие и устойчивость Шарик на рисунке находится в устойчивом равновесии в положении А - если немного
- 4. Устойчивость системы Система «шарик-горка» - нелинейная. Для неё • устойчивость - не свойство системы, а свойство
- 5. Устойчивость системы
- 6. Виды устойчивости Известно несколько определений устойчивости, которые отличаются некоторыми деталями. Если рассматривать только выход системы при
- 7. Виды устойчивости (1) Внутренняя или математическая устойчивость означает, что не только выход, но и все внутренние
- 8. Устойчивость «вход-выход» Обычно для инженеров в первую очередь важно, чтобы система не «пошла вразнос», то есть,
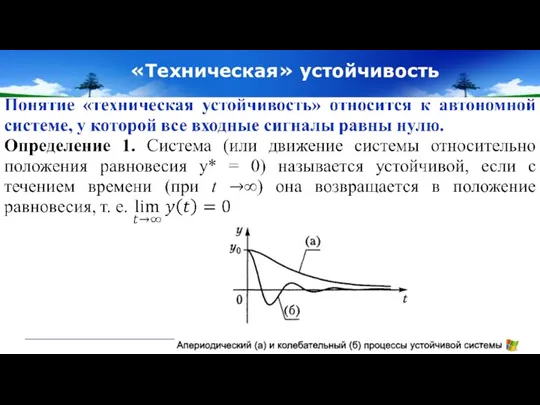
- 9. «Техническая» устойчивость
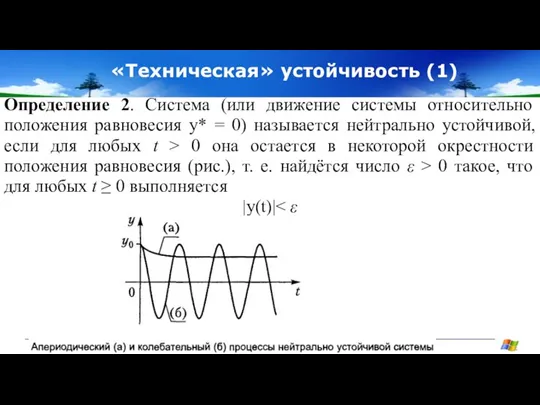
- 10. «Техническая» устойчивость (1) Определение 2. Система (или движение системы относительно положения равновесия у* = 0) называется
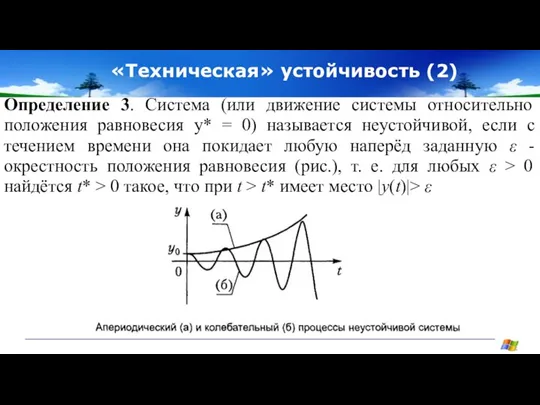
- 11. «Техническая» устойчивость (2) Определение 3. Система (или движение системы относительно положения равновесия у* = 0) называется
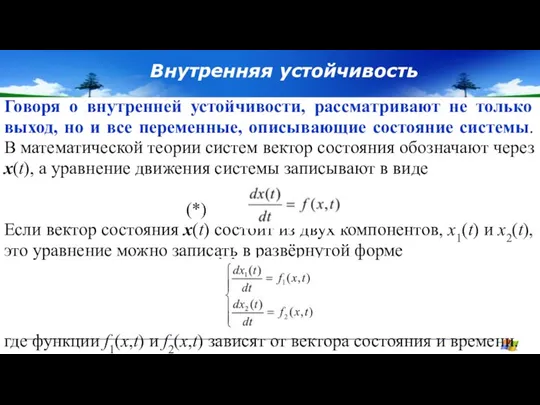
- 12. Внутренняя устойчивость Говоря о внутренней устойчивости, рассматривают не только выход, но и все переменные, описывающие состояние
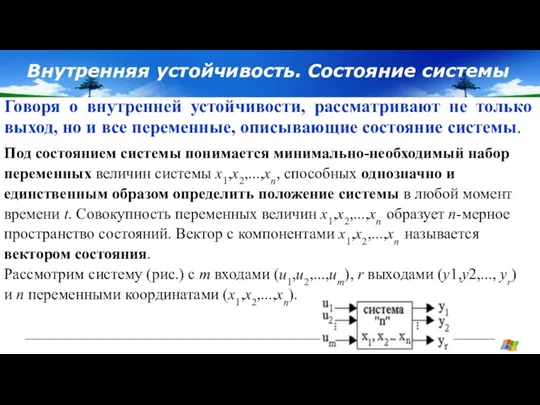
- 13. Внутренняя устойчивость. Состояние системы Говоря о внутренней устойчивости, рассматривают не только выход, но и все переменные,
- 14. Фазовое пространство При рассмотрении устойчивости полезным оказалось введение некоторых наглядных геометрических понятий и представлений. Основным из
- 15. Фазовый портрет типа устойчивый фокус Рис. Фазовый портрет а)расположение корней характеристического уравнения б) - переходный процесс;
- 16. Устойчивость движения Движение называется невозмущённым, если оно получено в результате рассмотрения идеализированной системы. Движение с учётом
- 17. Малые возмущения Уточним, что понимается под малыми возмущениями. Любые возмущения можно разделить на два типа: импульсные
- 18. Малые возмущения (1)
- 19. Непрерывно действующие возмущения Такие возмущения действуют на систему постоянно (рис.). Непрерывное возмущение можно представить в виде
- 20. ε-окрестность движения При анализе устойчивости вводится понятие ε-окрестности невозмущённого движения. С этой целью рассматривается траектория невозмущённого
- 21. Определение устойчивости по Ляпунову Формальное определение внутренней устойчивости было введено в работах А.М. Ляпунова, поэтому такое
- 23. Устойчивость по Ляпунову Фактически это означает, что чем меньше начальное отклонение, тем меньше траектория движения отклоняется
- 24. Пример устойчивой системы Рассмотрим маятник на рисунке ниже (а), состоящий из подвешенного металлического стержня и шарика.
- 25. Устойчивость по Ляпунову (1) Положение равновесия неустойчиво, если для него не выполняется условие устойчивости Ляпунова. Это
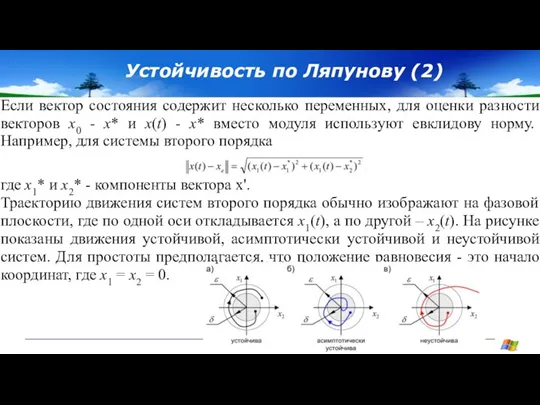
- 26. Устойчивость по Ляпунову (2) Если вектор состояния содержит несколько переменных, для оценки разности векторов х0 -
- 27. Особенности устойчивости линейных систем Автономная линейная система может иметь единственное положение равновесия (в котором все сигналы
- 28. Условия устойчивости линейных систем Для того, чтобы получить условия устойчивости, рассмотрим уравнение движения линейной системы, на
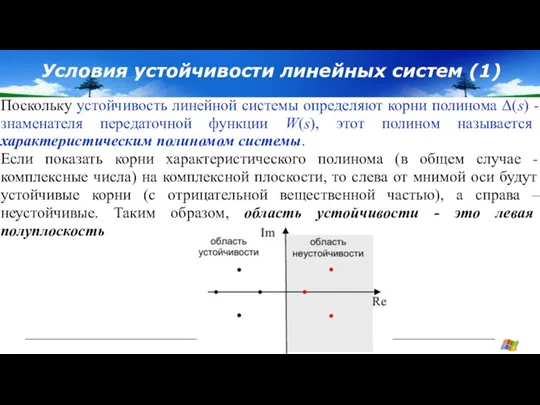
- 29. Условия устойчивости линейных систем (1) Поскольку устойчивость линейной системы определяют корни полинома Δ(s) - знаменателя передаточной
- 30. Нейтрально устойчивая система Предположим, что один из корней полинома Δ(s) равен нулю (скажем, α1 = 0),
- 31. Нейтрально устойчивая система (1) Допустим, что характеристический полином имеет пару чисто мнимых корней: α1 = jω
- 32. Движение в пространстве состояний Рассмотрим систему (рис.) с m входами (u1,u2,...,um), r выходами (y1,y2,..., yr) и
- 33. Модель системы в пространстве состояний В общем случае, рассматриваемая система может быть определена следующей векторно-матричной формой
- 34. Устойчивость внутренних процессов Теперь посмотрим, как определить внутреннюю устойчивость линейной системы, то есть, устойчивость внутренних процессов.
- 35. Устойчивость внутренних процессов . Сначала для простоты будем считать, что матрица А имеет вид Тогда уравнение
- 36. Устойчивость внутренних процессов (1) Если все корни характеристического полинома устойчивы (имеют отрицательные вещественные части, расположены в
- 37. Устойчивость линеаризованных систем Устойчивость нелинейной системы можно во многих случаях оценивать с помощью линеаризованной системы. Для
- 38. Устойчивость экономики в форме модели Самуэльсона — Хикса Характеристическое уравнение (полином) модели Самуэльсона—Хикса имеет следующий вид
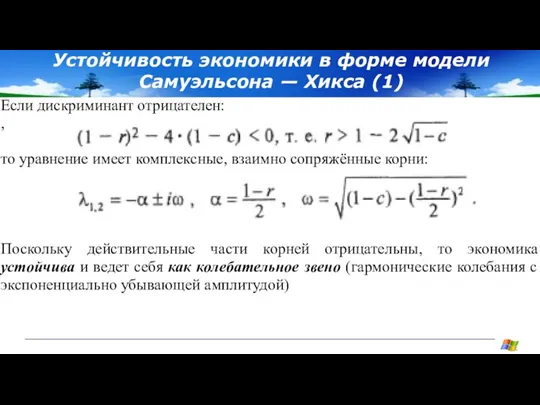
- 39. Устойчивость экономики в форме модели Самуэльсона — Хикса (1) Если дискриминант отрицателен: , то уравнение имеет
- 41. Скачать презентацию
Слайд 2Понятие устойчивости
Термин «устойчивость» используется в численных методах, механике, экономике, социологии, психологии.
Понятие устойчивости
Термин «устойчивость» используется в численных методах, механике, экономике, социологии, психологии.
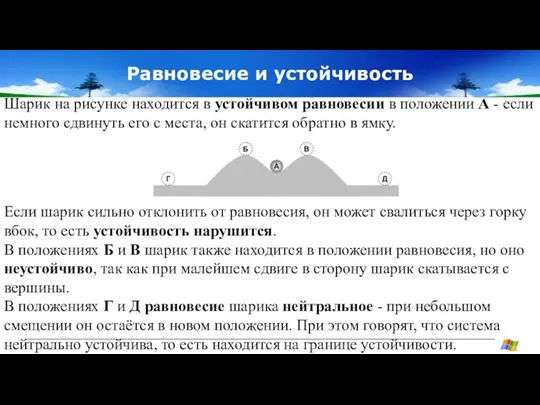
Слайд 3Равновесие и устойчивость
Шарик на рисунке находится в устойчивом равновесии в положении А
Равновесие и устойчивость
Шарик на рисунке находится в устойчивом равновесии в положении А
Слайд 4Устойчивость системы
Система «шарик-горка» - нелинейная. Для неё
• устойчивость - не свойство системы,
Устойчивость системы
Система «шарик-горка» - нелинейная. Для неё
• устойчивость - не свойство системы,
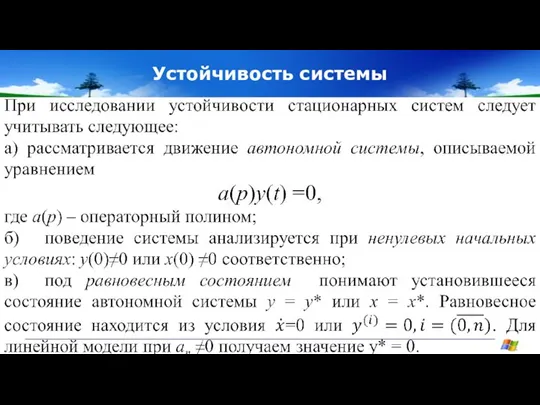
Слайд 5Устойчивость системы
Устойчивость системы
Слайд 6Виды устойчивости
Известно несколько определений устойчивости, которые отличаются некоторыми деталями.
Если рассматривать только
Виды устойчивости
Известно несколько определений устойчивости, которые отличаются некоторыми деталями.
Если рассматривать только
Слайд 7Виды устойчивости (1)
Внутренняя или математическая устойчивость означает, что не только выход, но
Виды устойчивости (1)
Внутренняя или математическая устойчивость означает, что не только выход, но
Слайд 8Устойчивость «вход-выход»
Обычно для инженеров в первую очередь важно, чтобы система не «пошла
Устойчивость «вход-выход»
Обычно для инженеров в первую очередь важно, чтобы система не «пошла
Слайд 9«Техническая» устойчивость
«Техническая» устойчивость
Слайд 10«Техническая» устойчивость (1)
Определение 2. Система (или движение системы относительно положения равновесия у*
«Техническая» устойчивость (1)
Определение 2. Система (или движение системы относительно положения равновесия у*
Слайд 11«Техническая» устойчивость (2)
Определение 3. Система (или движение системы относительно положения равновесия у*
«Техническая» устойчивость (2)
Определение 3. Система (или движение системы относительно положения равновесия у*
Слайд 12Внутренняя устойчивость
Говоря о внутренней устойчивости, рассматривают не только выход, но и все
Внутренняя устойчивость
Говоря о внутренней устойчивости, рассматривают не только выход, но и все
Слайд 13Внутренняя устойчивость. Состояние системы
Говоря о внутренней устойчивости, рассматривают не только выход, но
Внутренняя устойчивость. Состояние системы
Говоря о внутренней устойчивости, рассматривают не только выход, но
Слайд 14Фазовое пространство
При рассмотрении устойчивости полезным оказалось введение некоторых наглядных геометрических понятий и
Фазовое пространство
При рассмотрении устойчивости полезным оказалось введение некоторых наглядных геометрических понятий и
Слайд 15Фазовый портрет типа устойчивый фокус
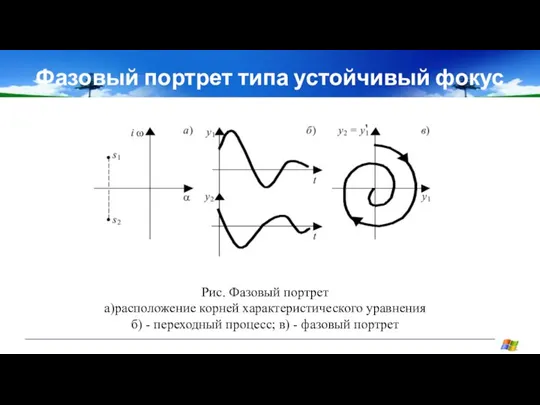
Рис. Фазовый портрет
а)расположение корней характеристического уравнения
б) - переходный
Фазовый портрет типа устойчивый фокус
Рис. Фазовый портрет
а)расположение корней характеристического уравнения
б) - переходный
Слайд 16Устойчивость движения
Движение называется невозмущённым, если оно получено в результате рассмотрения идеализированной системы.
Движение
Устойчивость движения
Движение называется невозмущённым, если оно получено в результате рассмотрения идеализированной системы.
Движение
Слайд 17Малые возмущения
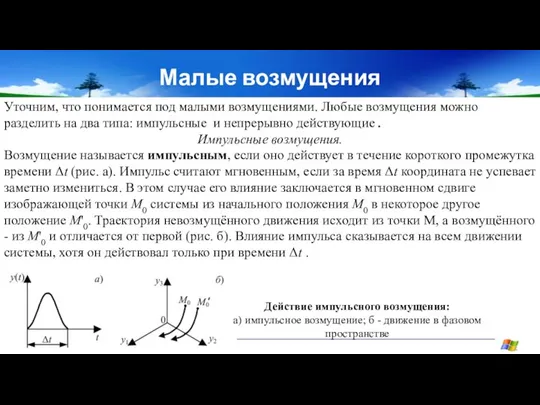
Уточним, что понимается под малыми возмущениями. Любые возмущения можно разделить на
Малые возмущения
Уточним, что понимается под малыми возмущениями. Любые возмущения можно разделить на
Слайд 18Малые возмущения (1)
Малые возмущения (1)
Слайд 19Непрерывно действующие возмущения
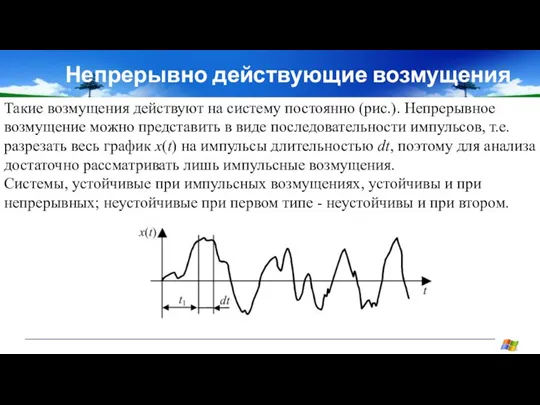
Такие возмущения действуют на систему постоянно (рис.). Непрерывное возмущение можно
Непрерывно действующие возмущения
Такие возмущения действуют на систему постоянно (рис.). Непрерывное возмущение можно
Слайд 20ε-окрестность движения
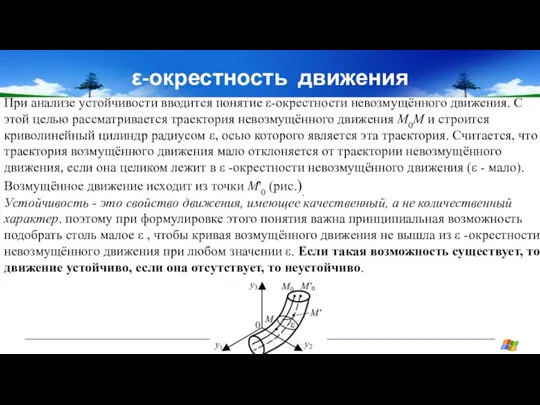
При анализе устойчивости вводится понятие ε-окрестности невозмущённого движения. С этой целью
ε-окрестность движения
При анализе устойчивости вводится понятие ε-окрестности невозмущённого движения. С этой целью
Слайд 21Определение устойчивости по Ляпунову
Формальное определение внутренней устойчивости было введено в работах А.М.
Определение устойчивости по Ляпунову
Формальное определение внутренней устойчивости было введено в работах А.М.
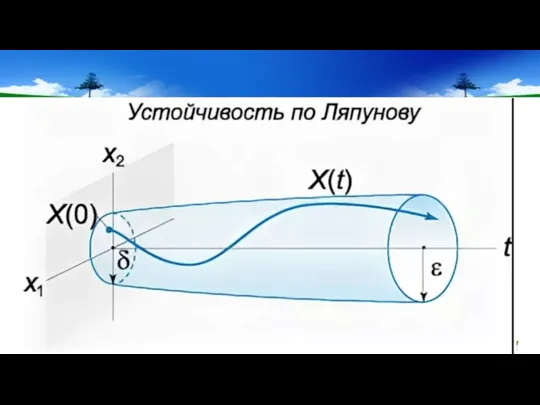
Слайд 23Устойчивость по Ляпунову
Фактически это означает, что чем меньше начальное отклонение, тем меньше
Устойчивость по Ляпунову
Фактически это означает, что чем меньше начальное отклонение, тем меньше
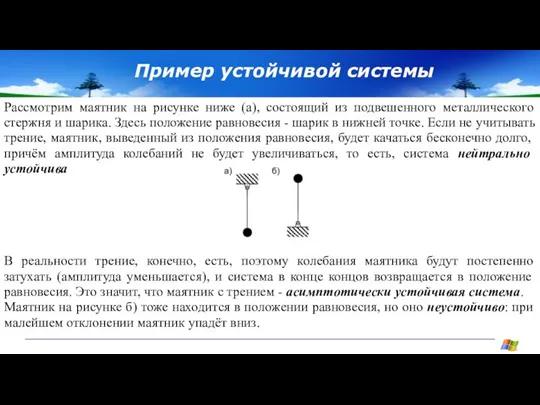
Слайд 24Пример устойчивой системы
Рассмотрим маятник на рисунке ниже (а), состоящий из подвешенного металлического
Пример устойчивой системы
Рассмотрим маятник на рисунке ниже (а), состоящий из подвешенного металлического
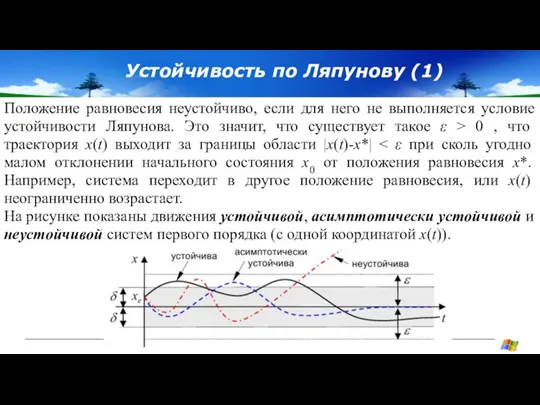
Слайд 25Устойчивость по Ляпунову (1)
Положение равновесия неустойчиво, если для него не выполняется условие
Устойчивость по Ляпунову (1)
Положение равновесия неустойчиво, если для него не выполняется условие
Слайд 26Устойчивость по Ляпунову (2)
Если вектор состояния содержит несколько переменных, для оценки разности
Устойчивость по Ляпунову (2)
Если вектор состояния содержит несколько переменных, для оценки разности
Слайд 27Особенности устойчивости линейных систем
Автономная линейная система может иметь единственное положение равновесия (в
Особенности устойчивости линейных систем
Автономная линейная система может иметь единственное положение равновесия (в
Слайд 28Условия устойчивости линейных систем
Для того, чтобы получить условия устойчивости, рассмотрим уравнение движения
Условия устойчивости линейных систем
Для того, чтобы получить условия устойчивости, рассмотрим уравнение движения
Слайд 29Условия устойчивости линейных систем (1)
Поскольку устойчивость линейной системы определяют корни полинома Δ(s)
Условия устойчивости линейных систем (1)
Поскольку устойчивость линейной системы определяют корни полинома Δ(s)
Слайд 30Нейтрально устойчивая система
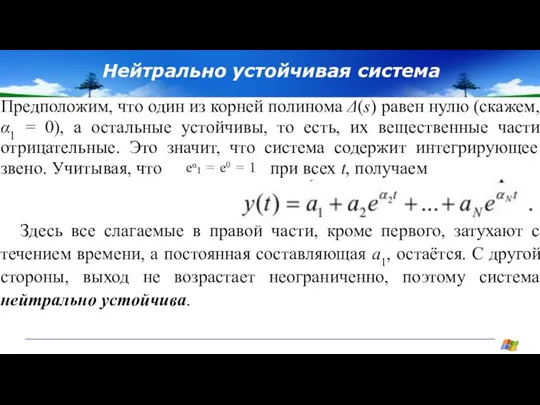
Предположим, что один из корней полинома Δ(s) равен нулю (скажем,
Нейтрально устойчивая система
Предположим, что один из корней полинома Δ(s) равен нулю (скажем,
Слайд 31Нейтрально устойчивая система (1)
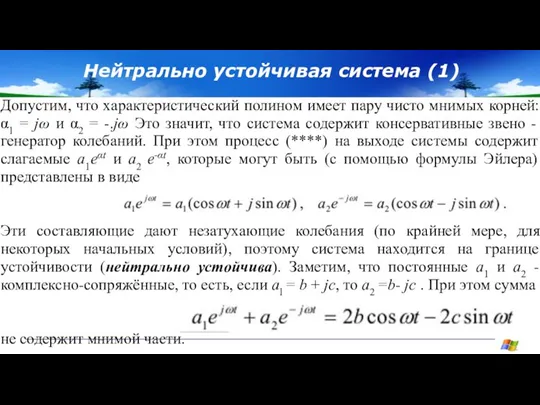
Допустим, что характеристический полином имеет пару чисто мнимых корней:
Нейтрально устойчивая система (1)
Допустим, что характеристический полином имеет пару чисто мнимых корней:
Слайд 32Движение в пространстве состояний
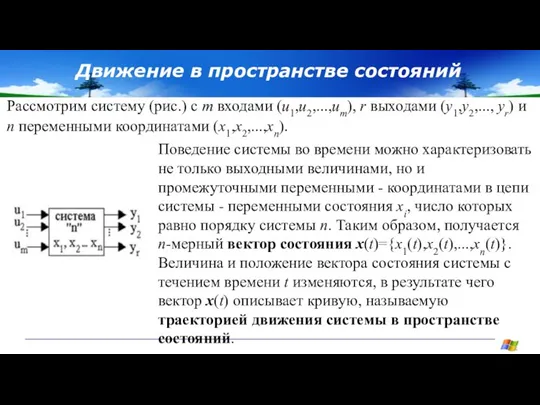
Рассмотрим систему (рис.) с m входами (u1,u2,...,um), r выходами
Движение в пространстве состояний
Рассмотрим систему (рис.) с m входами (u1,u2,...,um), r выходами
Слайд 33Модель системы в пространстве состояний
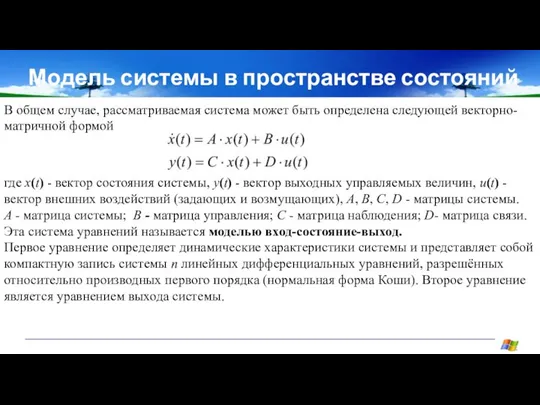
В общем случае, рассматриваемая система может быть определена
Модель системы в пространстве состояний
В общем случае, рассматриваемая система может быть определена
Слайд 34Устойчивость внутренних процессов
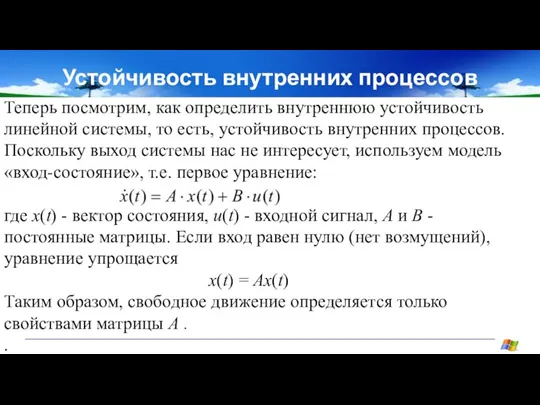
Теперь посмотрим, как определить внутреннюю устойчивость линейной системы, то есть,
Устойчивость внутренних процессов
Теперь посмотрим, как определить внутреннюю устойчивость линейной системы, то есть,
Слайд 35Устойчивость внутренних процессов
.
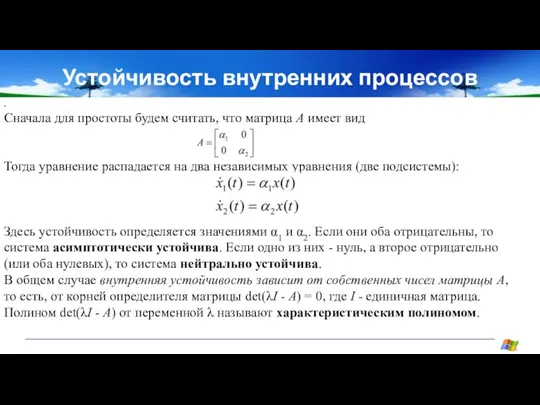
Сначала для простоты будем считать, что матрица А имеет вид
Тогда
Устойчивость внутренних процессов
.
Сначала для простоты будем считать, что матрица А имеет вид
Тогда
Слайд 36Устойчивость внутренних процессов (1)
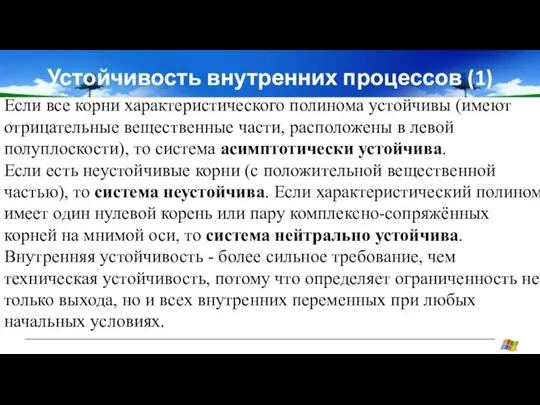
Если все корни характеристического полинома устойчивы (имеют отрицательные вещественные
Устойчивость внутренних процессов (1)
Если все корни характеристического полинома устойчивы (имеют отрицательные вещественные
Слайд 37Устойчивость линеаризованных систем
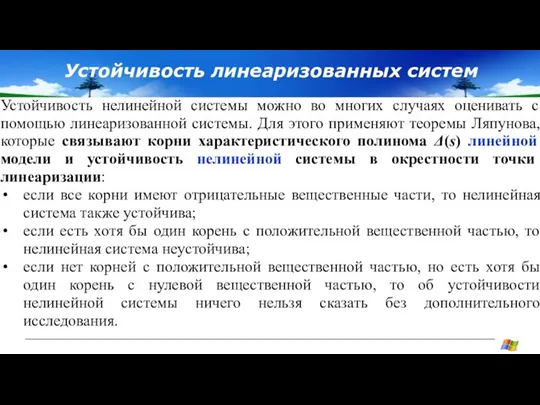
Устойчивость нелинейной системы можно во многих случаях оценивать с помощью
Устойчивость линеаризованных систем
Устойчивость нелинейной системы можно во многих случаях оценивать с помощью
Слайд 38Устойчивость экономики в форме модели Самуэльсона — Хикса
Характеристическое уравнение (полином) модели
Устойчивость экономики в форме модели Самуэльсона — Хикса
Характеристическое уравнение (полином) модели
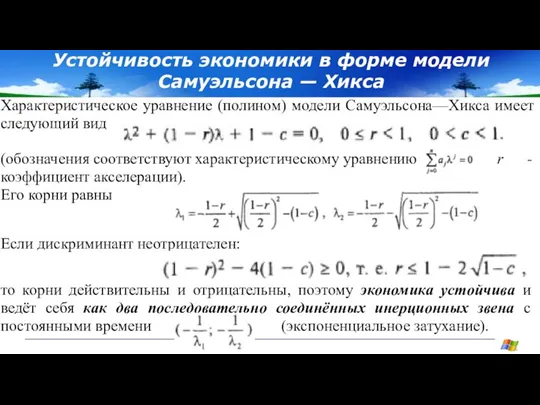
Слайд 39Устойчивость экономики в форме модели Самуэльсона — Хикса (1)
Если дискриминант отрицателен:
,
то уравнение
Устойчивость экономики в форме модели Самуэльсона — Хикса (1)
Если дискриминант отрицателен:
,
то уравнение
 Средства радиосвязи. Тема 2
Средства радиосвязи. Тема 2 Тепловые двигатели
Тепловые двигатели Радиационная гигиена
Радиационная гигиена Технология. Ядерная энергия
Технология. Ядерная энергия Тепловые двигатели
Тепловые двигатели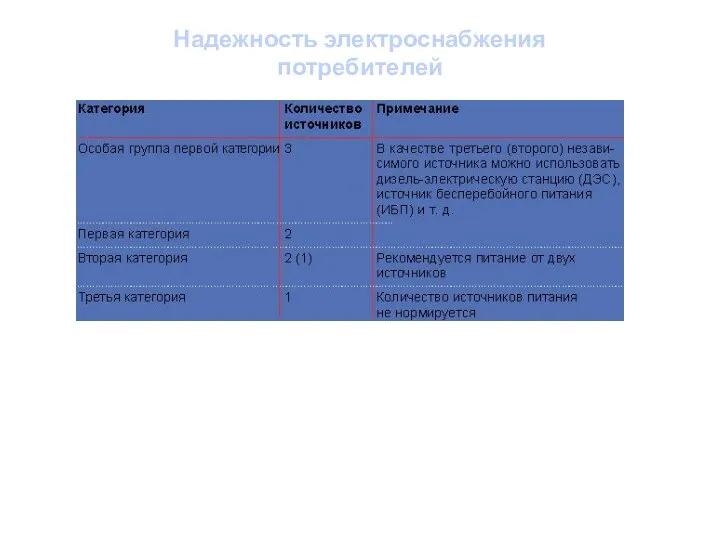 Надежность электроснабжения потребителей
Надежность электроснабжения потребителей Единая система допусков и посадок деталей и узлов машин, принципы её построения
Единая система допусков и посадок деталей и узлов машин, принципы её построения Дифракция механических волн
Дифракция механических волн Основы молекулярной физики
Основы молекулярной физики Магнитное поле электрического тока. Действие магнитного поля на проводники с током
Магнитное поле электрического тока. Действие магнитного поля на проводники с током Ознакомление со статистическими закономерностями на механической модели
Ознакомление со статистическими закономерностями на механической модели Решение задач на вычисление значения сопротивления силы тока, напряжения в цепи переменного тока
Решение задач на вычисление значения сопротивления силы тока, напряжения в цепи переменного тока Сила трения
Сила трения Двигатель внутреннего сгорания
Двигатель внутреннего сгорания Контрольная работа по теме МКТ
Контрольная работа по теме МКТ Династия ученых-физиков Кюри
Династия ученых-физиков Кюри Французский язык
Французский язык Выпуск первого автомобиля в г. Тольятти
Выпуск первого автомобиля в г. Тольятти Закон всемирного тяготения. Сила тяжести. Сила упругости. Сила трения. Подготовка к ОГЭ 9 класс
Закон всемирного тяготения. Сила тяжести. Сила упругости. Сила трения. Подготовка к ОГЭ 9 класс Гидравлика 2
Гидравлика 2 Плотность. Расчет массы и объема тела по его плотности
Плотность. Расчет массы и объема тела по его плотности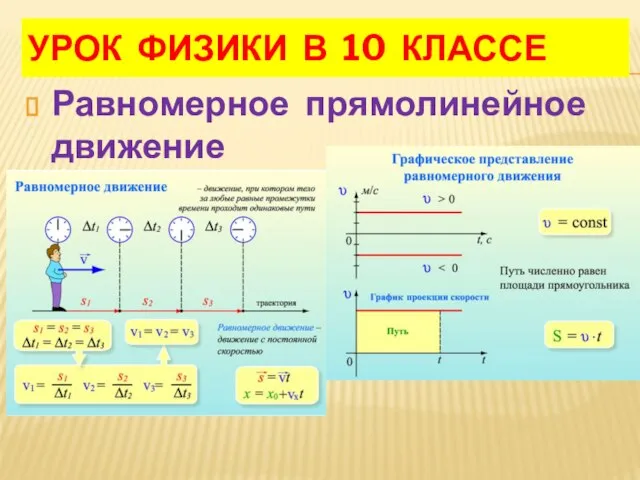 Урок физики в 10 классе. Равномерное прямолинейное движение
Урок физики в 10 классе. Равномерное прямолинейное движение Оптимальна обробка радіотеплових сигналів
Оптимальна обробка радіотеплових сигналів Модель Андерсона для описания магнитных примесей в металле
Модель Андерсона для описания магнитных примесей в металле Внутренняя энергия и работа в термодинамике
Внутренняя энергия и работа в термодинамике Методы инструментального выявления недостоверного учета электрической энергии
Методы инструментального выявления недостоверного учета электрической энергии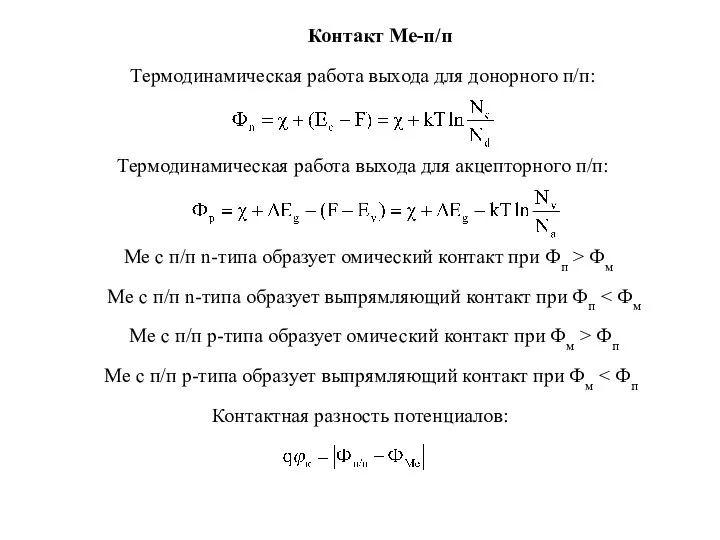 Me-полупроводник
Me-полупроводник Понятие об энтропии
Понятие об энтропии