- Теорія лінійних систем автоматичного керування. Лекція 2

Содержание
- 2. Лекція №2 Фундаментальні принципи автоматичного керування. Класифікація автоматичних систем. В залежності від того, який з вище
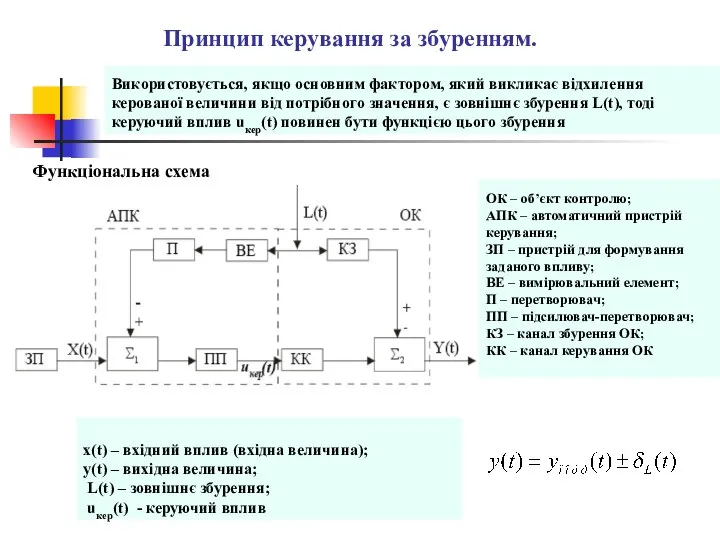
- 3. Принцип керування за збуренням. Функціональна схема ОК – об’єкт контролю; АПК – автоматичний пристрій керування; ЗП
- 4. В САК з принципом керування за збуренням керуючий вплив є функцією зовнішнього збурення, алгоритм керування: (1.2)
- 5. ПЕРЕВАГИ ТА НЕДОЛІКИ ПРИНЦИПУ КЕРУВАННЯ ЗА ЗБУРЕННЯМ Переваги принципу керування: Так як керуючий вплив безпосередньо залежить
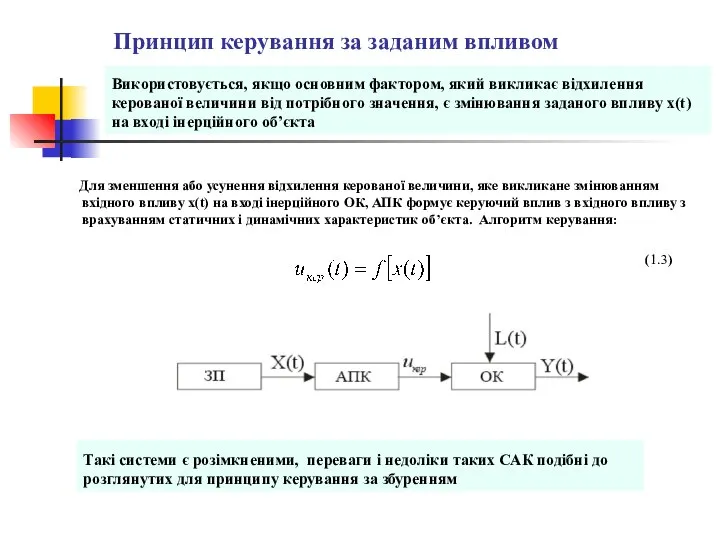
- 6. Принцип керування за заданим впливом Використовується, якщо основним фактором, який викликає відхилення керованої величини від потрібного
- 7. Принцип керування за відхиленням Для зменшення відхилення δ(t) вимірюється вихідна величина у(t), порівнюється з потрібним значенням
- 8. Алгоритм керування (1.4) Переваги В САК відбувається зменшення відхилення, незалежно від факторів, якими воно викликане. Такі
- 9. Принцип комбінованого керування ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗБУРЕННЯМ І ЗА ВІДХИЛЕННЯМ Для реалізації такого принципу керування
- 10. Принцип комбінованого керування ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗАДАНИМ ВПЛИВОМ І ЗА ВІДХИЛЕННЯМ Алгоритм керування (1.6)
- 11. За математичним описом системи бувають: лінійні, описуються лінійними диференціальними рівняннями за будь-яких (довільних) відхиленнях керованої величини
- 12. За кількістю керованих величин: одновимірні; багатовимірні. За наявністю місцевих зворотних зв’язків: одноконтурні, якщо є тільки один
- 13. За характером процесів, що протікають в системах: детерміновані, якщо процеси – детерміновані, тобто чіткого визначені, описуються
- 14. За характером параметрів елементів САК: САК зі сталими параметрами (описуються диференційними рівняннями зі сталими коефіцієнтами); САК
- 16. Скачать презентацию
Слайд 2Лекція №2
Фундаментальні принципи автоматичного керування.
Класифікація автоматичних систем.
В залежності від того, який з
Лекція №2
Фундаментальні принципи автоматичного керування.
Класифікація автоматичних систем.
В залежності від того, який з
Слайд 3Принцип керування за збуренням.
Функціональна схема
ОК – об’єкт контролю;
АПК – автоматичний пристрій керування;
ЗП
Принцип керування за збуренням.
Функціональна схема
ОК – об’єкт контролю; АПК – автоматичний пристрій керування; ЗП
Слайд 4В САК з принципом керування за збуренням керуючий вплив є функцією зовнішнього
В САК з принципом керування за збуренням керуючий вплив є функцією зовнішнього
Слайд 5
ПЕРЕВАГИ ТА НЕДОЛІКИ ПРИНЦИПУ КЕРУВАННЯ ЗА ЗБУРЕННЯМ
Переваги принципу керування:
Так
ПЕРЕВАГИ ТА НЕДОЛІКИ ПРИНЦИПУ КЕРУВАННЯ ЗА ЗБУРЕННЯМ
Переваги принципу керування:
Так
Слайд 6Принцип керування за заданим впливом
Використовується, якщо основним фактором, який викликає відхилення керованої
Принцип керування за заданим впливом
Використовується, якщо основним фактором, який викликає відхилення керованої
Слайд 7
Принцип керування за відхиленням
Для зменшення відхилення δ(t) вимірюється вихідна величина у(t),
Принцип керування за відхиленням
Для зменшення відхилення δ(t) вимірюється вихідна величина у(t),

Слайд 8Алгоритм керування
(1.4)
Переваги
В САК відбувається зменшення відхилення, незалежно від факторів, якими воно
Алгоритм керування
(1.4)
Переваги
В САК відбувається зменшення відхилення, незалежно від факторів, якими воно
Слайд 9
Принцип комбінованого керування
ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗБУРЕННЯМ І ЗА ВІДХИЛЕННЯМ
Для
Принцип комбінованого керування
ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗБУРЕННЯМ І ЗА ВІДХИЛЕННЯМ
Для

Слайд 10
Принцип комбінованого керування
ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗАДАНИМ ВПЛИВОМ І ЗА ВІДХИЛЕННЯМ
Алгоритм
Принцип комбінованого керування
ПОЄДНАННЯ ПРИНЦИПІВ КЕРУВАННЯ ЗА ЗАДАНИМ ВПЛИВОМ І ЗА ВІДХИЛЕННЯМ
Алгоритм

Слайд 11За математичним описом системи бувають:
лінійні, описуються лінійними диференціальними рівняннями за будь-яких (довільних)
За математичним описом системи бувають:
лінійні, описуються лінійними диференціальними рівняннями за будь-яких (довільних)
Слайд 12За кількістю керованих величин:
одновимірні;
багатовимірні.
За наявністю місцевих зворотних зв’язків:
одноконтурні, якщо є тільки один
За кількістю керованих величин:
одновимірні;
багатовимірні.
За наявністю місцевих зворотних зв’язків:
одноконтурні, якщо є тільки один
Слайд 13За характером процесів, що протікають в системах:
детерміновані, якщо процеси – детерміновані, тобто
За характером процесів, що протікають в системах:
детерміновані, якщо процеси – детерміновані, тобто
Слайд 14За характером параметрів елементів САК:
САК зі сталими параметрами (описуються диференційними рівняннями зі
За характером параметрів елементів САК:
САК зі сталими параметрами (описуються диференційними рівняннями зі
 Сложение сил. Равнодействующая сил
Сложение сил. Равнодействующая сил Квантовая теория теплоемкости
Квантовая теория теплоемкости Физико-химические параметры самораспространяющегося высокотемпературного синтеза
Физико-химические параметры самораспространяющегося высокотемпературного синтеза Самоиндукция, индуктивность
Самоиндукция, индуктивность Динамика. Законы Ньютона: область применимости
Динамика. Законы Ньютона: область применимости Сравнительная характеристика движения частиц
Сравнительная характеристика движения частиц Работа и энергия. Закон сохранения энергии в механике. Лекция 2
Работа и энергия. Закон сохранения энергии в механике. Лекция 2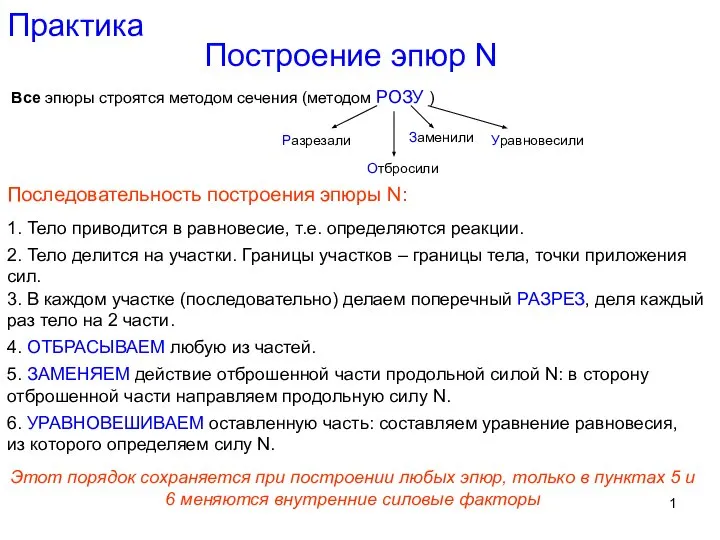 Практика. Построение эпюр N
Практика. Построение эпюр N Фотоны. Эффект Комптона
Фотоны. Эффект Комптона Магнитное поле прямого тока и катушки с током
Магнитное поле прямого тока и катушки с током Распределение Максвелла
Распределение Максвелла Оптимизация деталей ГТД
Оптимизация деталей ГТД Теоретическая механика. Модуль 1. Раздел 1 – статика
Теоретическая механика. Модуль 1. Раздел 1 – статика Механические колебания. 9 класс
Механические колебания. 9 класс Определение показателя преломления стекла. Лабораторная работа
Определение показателя преломления стекла. Лабораторная работа Дефлектор
Дефлектор Исследование изображений, даваемых линзой
Исследование изображений, даваемых линзой Свойства жидкости
Свойства жидкости Измерение температуры
Измерение температуры Презентация по физике "Электростатика. Электрические взаимодействия. Исторический очерк" -
Презентация по физике "Электростатика. Электрические взаимодействия. Исторический очерк" -  Презентация на тему Состояние невесомости
Презентация на тему Состояние невесомости  Теплопроводность
Теплопроводность Камера Обскура
Камера Обскура Необычные виды транспорта. Поезд на магнитной подушке
Необычные виды транспорта. Поезд на магнитной подушке Урок физики по теме: Приходите ко мне в гости, я вас чаем угощу
Урок физики по теме: Приходите ко мне в гости, я вас чаем угощу Архимедова сила. 7 класс
Архимедова сила. 7 класс Движение тел. Материальная точка
Движение тел. Материальная точка Главные центральные оси сечения
Главные центральные оси сечения