- ТMM структура. Лекция 1

Содержание
- 2. Теория механизмов и машин - это наука, изучающая структуру, кинематику и динамику механизмов и машин в
- 3. Основные задачи ТММ Изучение строения (структуры) механизма Определение положений механизмов и траекторий, описываемых отдельными точками Определение
- 4. Основные разделы курса ТММ структура механизмов и машин геометрия механизмов и их элементов кинематика механизмов динамика
- 5. Основные понятия и определения курса ТММ Машина – система твердых тел предназначенная для преобразования энергии, материалов
- 6. Классификация машин 1.Энергетические машины - преобразуют энергию одного вида в энергию другого вида.
- 7. Энергетические машины Двигатели преобразуют любой вид энергии в механическую Например, электродвигатели преобразуют электрическую энергию, двигатели внутреннего
- 8. Классификация машин 2. Рабочие машины - машины использующие механическую энергию для совершения работы по перемещению и
- 9. Рабочие машины Транспортные машины - используют механическую энергию для изменения положения объекта (его координат). Технологические машины
- 10. Классификация машин 2. Информационные машины - машины предназначенные для обработки и преобразования информации. .
- 11. Информационные машины Математические машины - преобразуют входную информацию в математическую модель исследуемого объекта. Контрольно-управляющие машины -
- 12. Классификация машин 4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны изменять программу
- 13. Кибернетические машины
- 14. Механизм - система тел, предназначенная для преобразования движения одного или нескольких твердых тел в требуемые движения
- 15. Классификация механизмов по конструктивным признакам 1. Рычажные механизмы
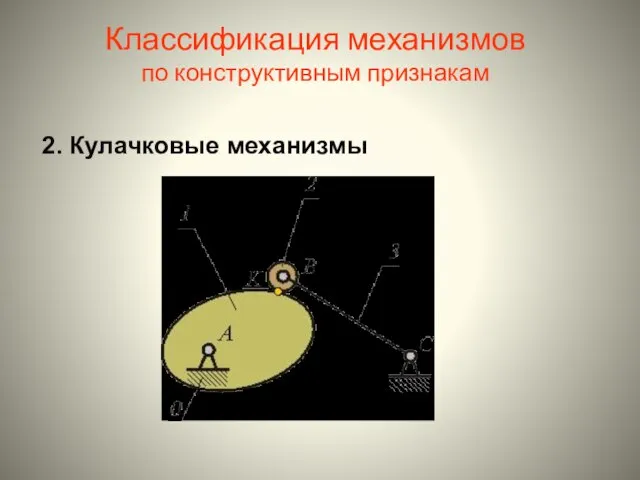
- 16. 2. Кулачковые механизмы Классификация механизмов по конструктивным признакам
- 17. Классификация механизмов по конструктивным признакам 3. Зубчатые механизмы
- 18. Классификация механизмов по конструктивным признакам 4. Фрикционные механизмы
- 19. Классификация механизмов по конструктивным признакам 5. Гидравлические и пневматические механизмы
- 20. Классификация механизмов по конструктивным признакам 6. Механизмы с гибкими звеньями Цепная передача Ременная передача
- 21. Плоские У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных плоскостях. Классификация механизмов по
- 22. Машинный агрегат – совокупность взаимосвязанных механизмов Основные понятия и определения курса ТММ
- 23. Кулачковый механизм Рычажный механизм Зубчатый механизм Планетарный механизм Цепная передача Ременная передача Машинный агрегат
- 24. Звено - это твердое тело, входящее в состав механизма Классификация звеньев 1.Неподвижное звено - стойка. 2.Подвижные
- 25. В рычажных механизмах имеются следующие подвижные звенья: кривошип совершает полный оборот относительно стойки; коромысло совершает неполный
- 26. Кинематическая пара - это подвижное соединение двух звеньев Элементы механизма
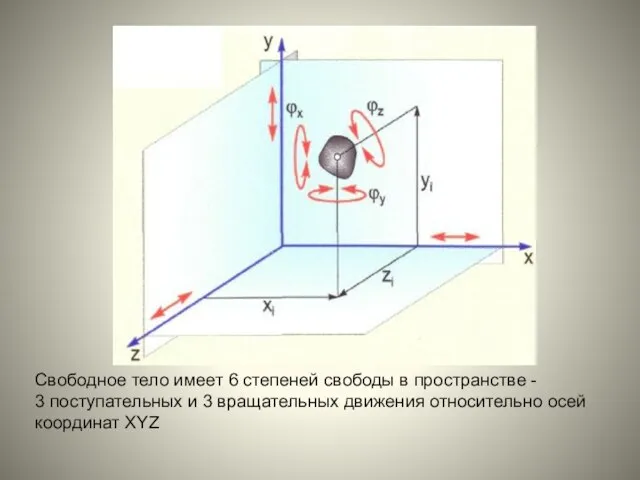
- 27. Свободное тело имеет 6 степеней свободы в пространстве - 3 поступательных и 3 вращательных движения относительно
- 28. Классификация кинематических пар по числу степеней свободы H и числу условий связи S Возможные независимые движения
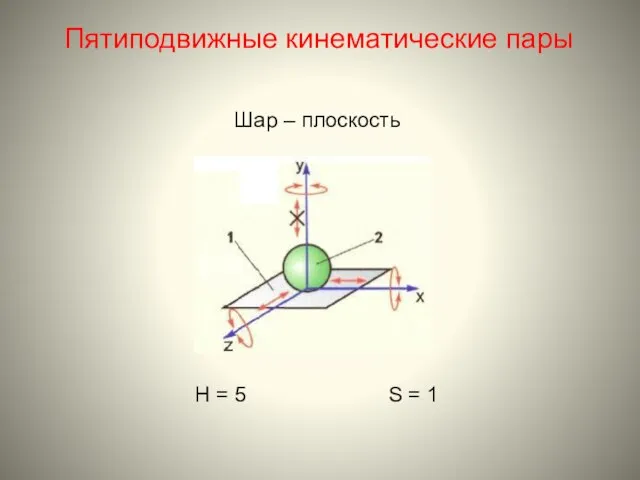
- 29. Пятиподвижные кинематические пары Шар – плоскость H = 5 S = 1
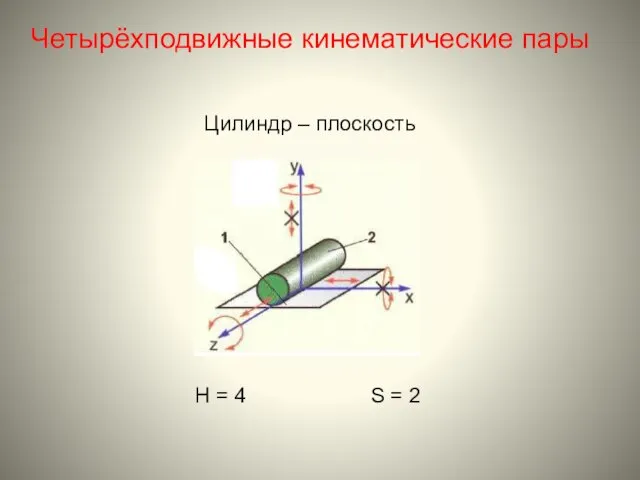
- 30. Четырёхподвижные кинематические пары Цилиндр – плоскость H = 4 S = 2
- 31. Трёхподвижные кинематические пары Сферическая H = 3 S = 3
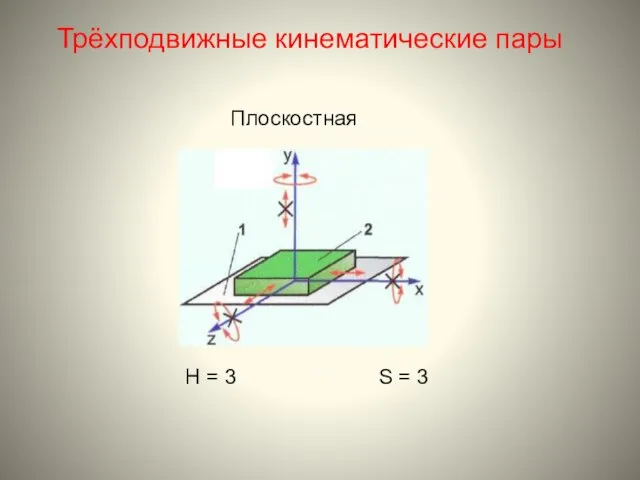
- 32. Трёхподвижные кинематические пары Плоскостная H = 3 S = 3
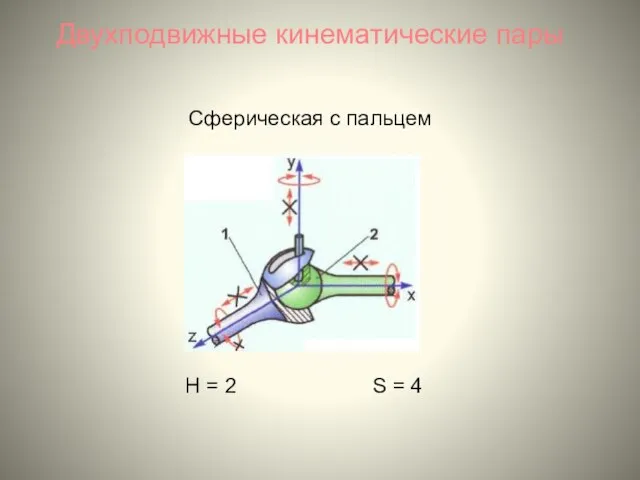
- 33. Двухподвижные кинематические пары Сферическая с пальцем H = 2 S = 4
- 34. Двухподвижные кинематические пары Цилиндрическая H = 2 S = 4
- 35. Одноподвижные кинематические пары Поступательная H = 1 S = 5
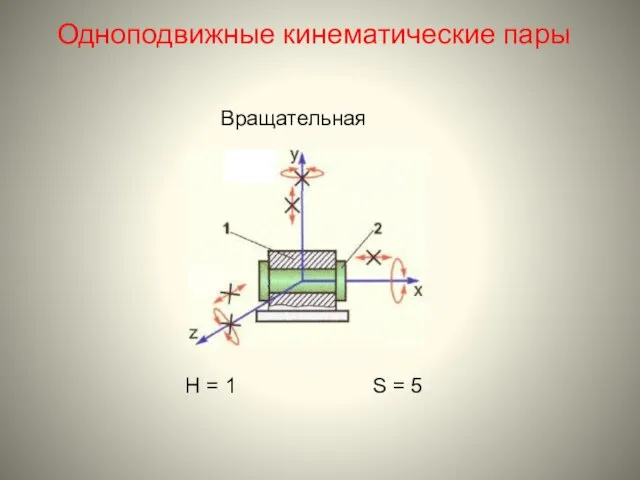
- 36. Одноподвижные кинематические пары Вращательная H = 1 S = 5
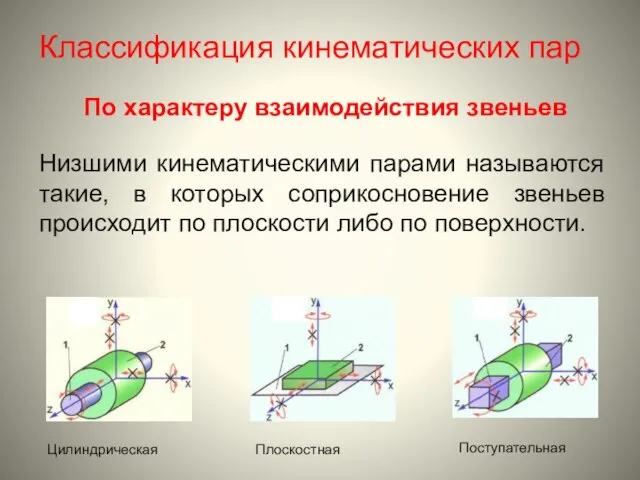
- 37. Классификация кинематических пар По характеру взаимодействия звеньев Низшими кинематическими парами называются такие, в которых соприкосновение звеньев
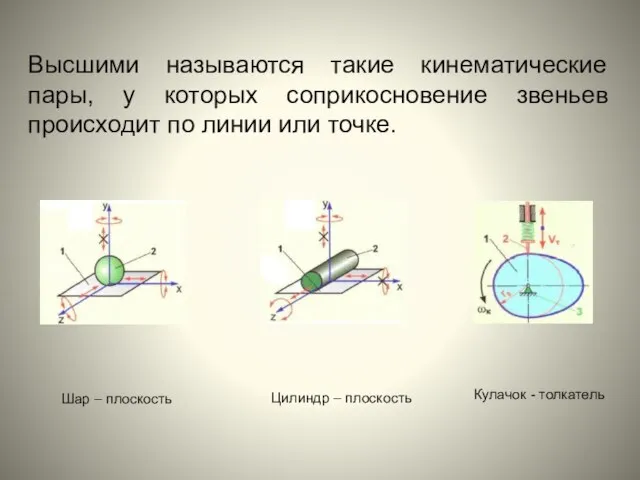
- 38. Высшими называются такие кинематические пары, у которых соприкосновение звеньев происходит по линии или точке. Шар –
- 39. Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар. Элементы механизма
- 40. Классификация кинематических цепей Незамкнутые - это кинематические цепи, которые имеют звенья, входящие только в одну кинематическую
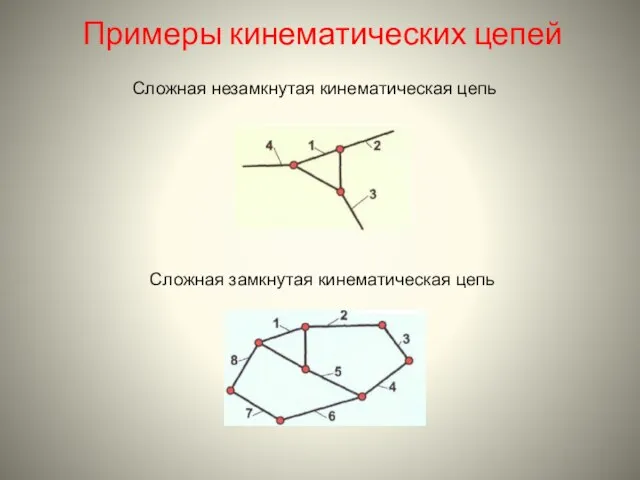
- 41. Примеры кинематических цепей Сложная незамкнутая кинематическая цепь Сложная замкнутая кинематическая цепь
- 43. Скачать презентацию
Слайд 3Основные задачи ТММ
Изучение строения (структуры) механизма
Определение положений механизмов и траекторий, описываемых
Основные задачи ТММ
Изучение строения (структуры) механизма
Определение положений механизмов и траекторий, описываемых
Слайд 4Основные разделы курса ТММ
структура механизмов и машин
геометрия механизмов и их элементов
кинематика механизмов
динамика
Основные разделы курса ТММ
структура механизмов и машин
геометрия механизмов и их элементов
кинематика механизмов
динамика
Слайд 5Основные понятия и определения курса ТММ
Машина – система твердых тел предназначенная для
Основные понятия и определения курса ТММ
Машина – система твердых тел предназначенная для
Слайд 6Классификация машин
1.Энергетические машины - преобразуют энергию одного вида в энергию другого вида.
Классификация машин
1.Энергетические машины - преобразуют энергию одного вида в энергию другого вида.

Слайд 7Энергетические машины
Двигатели преобразуют любой вид энергии в механическую
Например, электродвигатели преобразуют
Энергетические машины
Двигатели преобразуют любой вид энергии в механическую
Например, электродвигатели преобразуют
Слайд 8Классификация машин
2. Рабочие машины - машины использующие механическую энергию для совершения работы
Классификация машин
2. Рабочие машины - машины использующие механическую энергию для совершения работы

Слайд 9Рабочие машины
Транспортные машины - используют механическую энергию для изменения положения объекта
Рабочие машины
Транспортные машины - используют механическую энергию для изменения положения объекта
Слайд 10Классификация машин
2. Информационные машины - машины предназначенные для обработки и преобразования информации.
Классификация машин
2. Информационные машины - машины предназначенные для обработки и преобразования информации.

Слайд 11Информационные машины
Математические машины - преобразуют входную информацию в математическую модель исследуемого
Информационные машины
Математические машины - преобразуют входную информацию в математическую модель исследуемого
Слайд 12Классификация машин
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны
Классификация машин
4. Кибернетические машины - машины управляющие рабочими или энергетическими машинами, которые способны
Слайд 13Кибернетические машины
Кибернетические машины

Слайд 14Механизм - система тел, предназначенная для преобразования движения одного или нескольких твердых
Механизм - система тел, предназначенная для преобразования движения одного или нескольких твердых
Слайд 15Классификация механизмов
по конструктивным признакам
1. Рычажные механизмы
Классификация механизмов
по конструктивным признакам
1. Рычажные механизмы

Слайд 162. Кулачковые механизмы
Классификация механизмов
по конструктивным признакам
2. Кулачковые механизмы
Классификация механизмов
по конструктивным признакам
Слайд 17Классификация механизмов
по конструктивным признакам
3. Зубчатые механизмы
Классификация механизмов
по конструктивным признакам
3. Зубчатые механизмы

Слайд 18Классификация механизмов
по конструктивным признакам
4. Фрикционные механизмы
Классификация механизмов
по конструктивным признакам
4. Фрикционные механизмы

Слайд 19Классификация механизмов
по конструктивным признакам
5. Гидравлические и пневматические механизмы
Классификация механизмов
по конструктивным признакам
5. Гидравлические и пневматические механизмы

Слайд 20Классификация механизмов
по конструктивным признакам
6. Механизмы с гибкими звеньями
Цепная передача
Ременная передача
Классификация механизмов
по конструктивным признакам
6. Механизмы с гибкими звеньями
Цепная передача
Ременная передача

Слайд 21Плоские
У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных
Плоские
У плоского механизма точки его звеньев описывают траектории, лежащие в параллельных
Слайд 22Машинный агрегат – совокупность взаимосвязанных механизмов
Основные понятия и определения курса ТММ
Машинный агрегат – совокупность взаимосвязанных механизмов
Основные понятия и определения курса ТММ
Слайд 23Кулачковый механизм
Рычажный механизм
Зубчатый механизм
Планетарный механизм
Цепная
передача
Ременная
передача
Машинный агрегат
Кулачковый механизм
Рычажный механизм
Зубчатый механизм
Планетарный механизм
Цепная
передача
Ременная
передача
Машинный агрегат

Слайд 24Звено - это твердое тело, входящее в состав механизма
Классификация звеньев
1.Неподвижное звено -
Звено - это твердое тело, входящее в состав механизма
Классификация звеньев
1.Неподвижное звено -
Слайд 25В рычажных механизмах имеются следующие
подвижные звенья:
кривошип совершает полный оборот относительно стойки;
коромысло
В рычажных механизмах имеются следующие
подвижные звенья:
кривошип совершает полный оборот относительно стойки;
коромысло
Слайд 26Кинематическая пара - это подвижное соединение двух звеньев
Элементы механизма
Кинематическая пара - это подвижное соединение двух звеньев
Элементы механизма
Слайд 27Свободное тело имеет 6 степеней свободы в пространстве -
3 поступательных и 3
Свободное тело имеет 6 степеней свободы в пространстве -
3 поступательных и 3
Слайд 28Классификация кинематических пар по числу степеней свободы H и числу условий связи
Классификация кинематических пар по числу степеней свободы H и числу условий связи
Слайд 29Пятиподвижные кинематические пары
Шар – плоскость
H = 5 S = 1
Пятиподвижные кинематические пары
Шар – плоскость
H = 5 S = 1
Слайд 30Четырёхподвижные кинематические пары
Цилиндр – плоскость
H = 4 S = 2
Четырёхподвижные кинематические пары
Цилиндр – плоскость
H = 4 S = 2
Слайд 31Трёхподвижные кинематические пары
Сферическая
H = 3 S = 3
Трёхподвижные кинематические пары
Сферическая
H = 3 S = 3

Слайд 32Трёхподвижные кинематические пары
Плоскостная
H = 3 S = 3
Трёхподвижные кинематические пары
Плоскостная
H = 3 S = 3
Слайд 33Двухподвижные кинематические пары
Сферическая с пальцем
H = 2 S = 4
Двухподвижные кинематические пары
Сферическая с пальцем
H = 2 S = 4
Слайд 34Двухподвижные кинематические пары
Цилиндрическая
H = 2 S = 4
Двухподвижные кинематические пары
Цилиндрическая
H = 2 S = 4

Слайд 35Одноподвижные кинематические пары
Поступательная
H = 1 S = 5
Одноподвижные кинематические пары
Поступательная
H = 1 S = 5

Слайд 36Одноподвижные кинематические пары
Вращательная
H = 1 S = 5
Одноподвижные кинематические пары
Вращательная
H = 1 S = 5
Слайд 37Классификация кинематических пар
По характеру взаимодействия звеньев
Низшими кинематическими парами называются такие, в
Классификация кинематических пар
По характеру взаимодействия звеньев
Низшими кинематическими парами называются такие, в
Слайд 38Высшими называются такие кинематические пары, у которых соприкосновение звеньев происходит по линии
Высшими называются такие кинематические пары, у которых соприкосновение звеньев происходит по линии
Слайд 39Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
Элементы механизма
Кинематическая цепь - это система звеньев, соединённых с помощью кинематических пар.
Элементы механизма
Слайд 40Классификация кинематических цепей
Незамкнутые - это кинематические цепи, которые имеют звенья, входящие
Классификация кинематических цепей
Незамкнутые - это кинематические цепи, которые имеют звенья, входящие
Слайд 41 Примеры кинематических цепей
Сложная незамкнутая кинематическая цепь
Сложная замкнутая кинематическая цепь
Примеры кинематических цепей
Сложная незамкнутая кинематическая цепь
Сложная замкнутая кинематическая цепь
 Игровая встреча. Великие физики
Игровая встреча. Великие физики מה השעה?
מה השעה? Плотность
Плотность Электроемкость. Электроемкость конденсатора. Энергия конденсатора
Электроемкость. Электроемкость конденсатора. Энергия конденсатора Молекулярная физика
Молекулярная физика Технология проверки технического состояния направляющих и ведущих колёс
Технология проверки технического состояния направляющих и ведущих колёс Технологические характеристики грунтов. Определение трудности процессов разработки горных пород
Технологические характеристики грунтов. Определение трудности процессов разработки горных пород Презентация по физике "Последовательное соединенье проводников" -
Презентация по физике "Последовательное соединенье проводников" -  Как устроен атом
Как устроен атом Простые механизмы. Механическая работа
Простые механизмы. Механическая работа Магнитное поле
Магнитное поле Сверхпроводимость. Свойства
Сверхпроводимость. Свойства Презентация на тему Самоиндукция (9 класс)
Презентация на тему Самоиндукция (9 класс)  Свойства дискретно-временного преобразования Фурье
Свойства дискретно-временного преобразования Фурье Электрическая система. Процесс
Электрическая система. Процесс 11, задание и конспект по электростатике
11, задание и конспект по электростатике Дифференциальное уравнение теплопроводности
Дифференциальное уравнение теплопроводности Интерференция света
Интерференция света Свободное падение тел (9 класс)
Свободное падение тел (9 класс) Презентация на тему Рычаг
Презентация на тему Рычаг  Динамика точки в неинерциальной системе отсчета
Динамика точки в неинерциальной системе отсчета Практические занятия
Практические занятия Радиоэлектроника
Радиоэлектроника Силы в природе
Силы в природе Физика в космосе
Физика в космосе Однофазные цепи
Однофазные цепи Поверхностные и пространственные методы визуализации потока в аэродинамических трубах
Поверхностные и пространственные методы визуализации потока в аэродинамических трубах Казкі астранаўта
Казкі астранаўта