- Учебно-исследовательская работа студентов. Процесс регулирования. Регулятор Уатта

Содержание
- 2. Задачи УИРС 1. Динамическая система (планетарная система). Среда моделирования 2. Статическая логическая система – модель текста
- 3. Домашнее задание – 4 штуки 1. Собрать, оттестировать и сдать проект «Модель Солнечной системы». Работающий проект
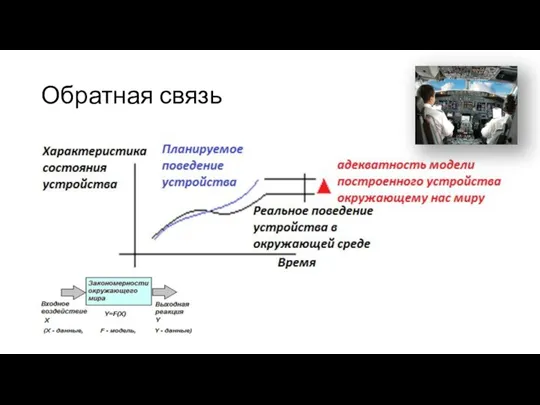
- 4. Процесс регулирования. Регулятор Уатта Регулирование - поддержание постоянных или плановых параметров процесса
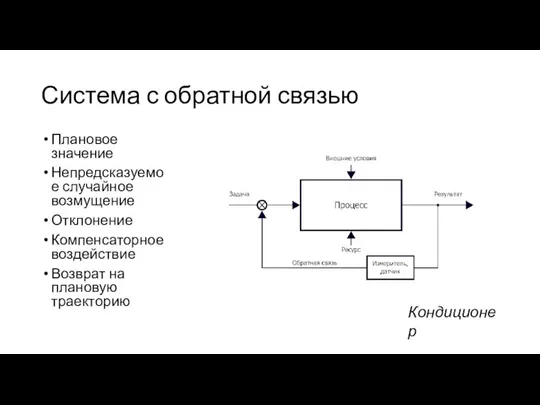
- 5. Система с обратной связью Плановое значение Непредсказуемое случайное возмущение Отклонение Компенсаторное воздействие Возврат на плановую траекторию
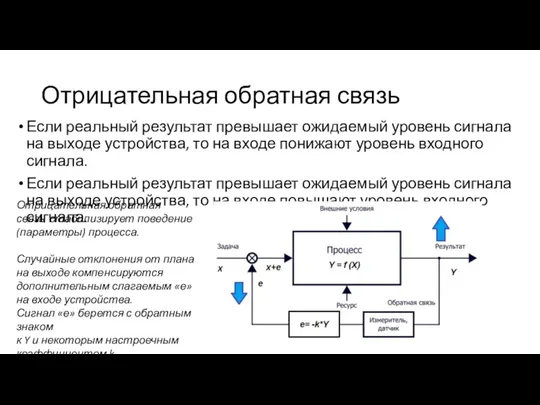
- 6. Отрицательная обратная связь Если реальный результат превышает ожидаемый уровень сигнала на выходе устройства, то на входе
- 7. Регулирование Возврат летательного аппарата на плановую (расчетную) траекторию
- 8. Обратная связь
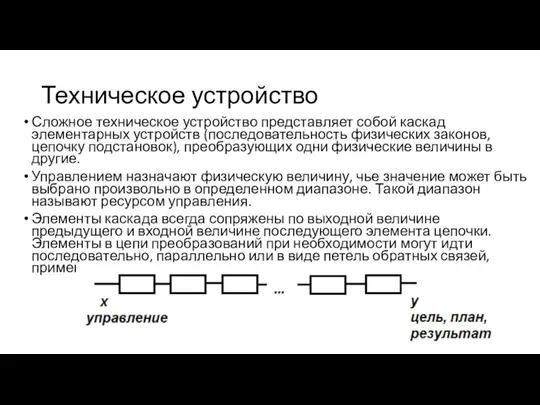
- 9. Техническое устройство Сложное техническое устройство представляет собой каскад элементарных устройств (последовательность физических законов, цепочку подстановок), преобразующих
- 10. Управление Там, где не справляется регулирование Расчет плановой траектории достижения цели заново Иногда отклонение от плана
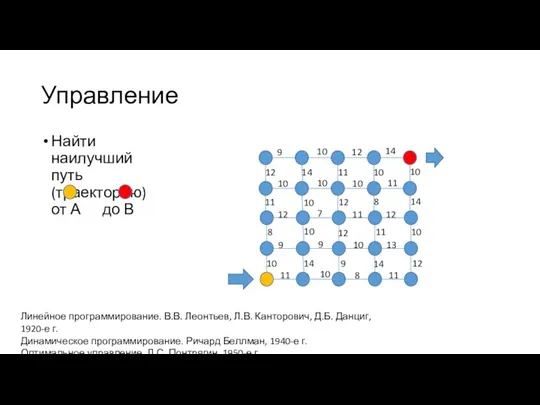
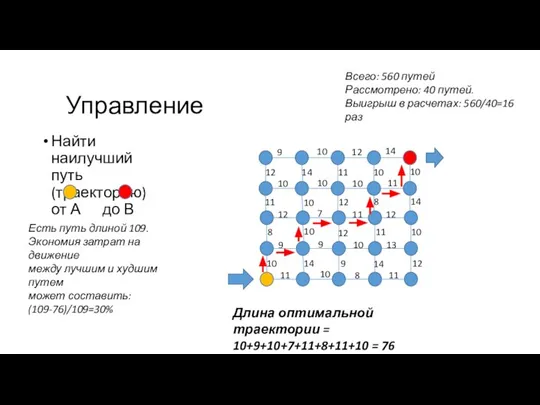
- 11. Управление Найти наилучший путь (траекторию) от А до В 14 10 11 14 10 12 10
- 12. 14 10 10 14 14 10 11 14 10 12 10 8 11 14 11 12
- 13. 14 10 10 14 14 10 11 14 10 12 10 8 11 14 11 12
- 14. 14 10 11 14 10 12 10 8 11 14 11 12 12 9 14 10
- 15. 14 10 11 14 10 12 10 8 11 14 11 12 12 9 14 10
- 16. 14 10 11 14 10 12 10 8 11 14 11 12 12 9 14 10
- 17. 14 10 11 14 10 12 10 8 11 14 11 12 12 9 14 10
- 18. 14 10 11 14 10 12 10 8 11 14 11 12 12 9 14 10
- 19. 14 11 14 10 12 10 8 11 14 11 12 12 9 14 10 10
- 20. Управление Найти наилучший путь (траекторию) от А до В 14 10 11 14 10 12 10
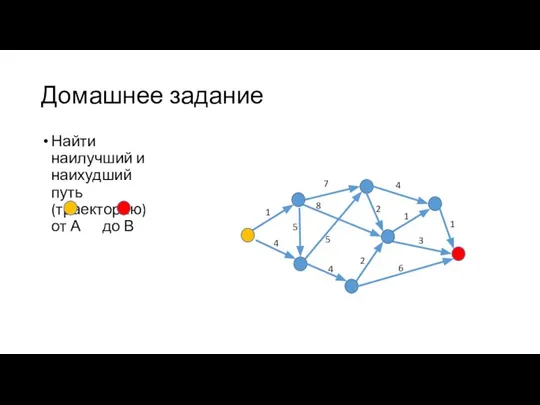
- 21. Домашнее задание Найти наилучший и наихудший путь (траекторию) от А до В 4 3 6 8
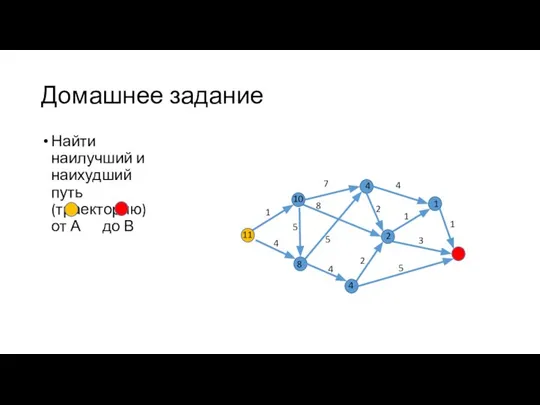
- 22. Домашнее задание Найти наилучший и наихудший путь (траекторию) от А до В 4 3 5 8
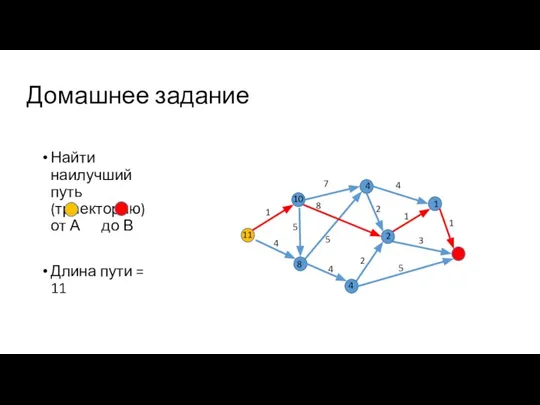
- 23. Домашнее задание Найти наилучший путь (траекторию) от А до В Длина пути = 11 4 3
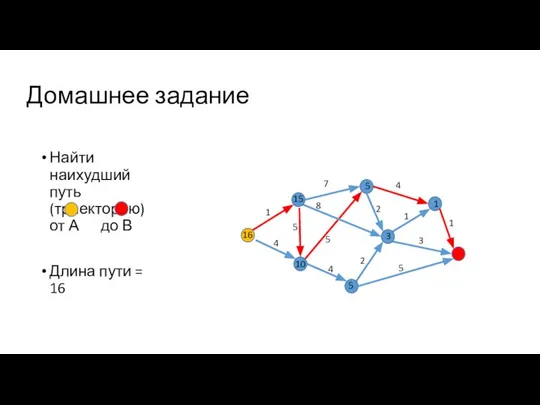
- 24. Домашнее задание Найти наихудший путь (траекторию) от А до В Длина пути = 16 4 3
- 26. Скачать презентацию
Слайд 2Задачи УИРС
1. Динамическая система (планетарная система). Среда моделирования
2. Статическая логическая система –
Задачи УИРС
1. Динамическая система (планетарная система). Среда моделирования
2. Статическая логическая система –
Слайд 3Домашнее задание – 4 штуки
1. Собрать, оттестировать и сдать проект «Модель Солнечной
Домашнее задание – 4 штуки
1. Собрать, оттестировать и сдать проект «Модель Солнечной
Слайд 4Процесс регулирования.
Регулятор Уатта
Регулирование - поддержание постоянных или плановых параметров процесса
Процесс регулирования.
Регулятор Уатта
Регулирование - поддержание постоянных или плановых параметров процесса

Слайд 5Система с обратной связью
Плановое значение
Непредсказуемое случайное возмущение
Отклонение
Компенсаторное воздействие
Возврат на плановую траекторию
Кондиционер
Система с обратной связью
Плановое значение
Непредсказуемое случайное возмущение
Отклонение
Компенсаторное воздействие
Возврат на плановую траекторию
Кондиционер
Слайд 6Отрицательная обратная связь
Если реальный результат превышает ожидаемый уровень сигнала на выходе устройства,
Отрицательная обратная связь
Если реальный результат превышает ожидаемый уровень сигнала на выходе устройства,
Слайд 7Регулирование
Возврат летательного аппарата на плановую (расчетную) траекторию
Регулирование
Возврат летательного аппарата на плановую (расчетную) траекторию

Слайд 8Обратная связь
Обратная связь
Слайд 9Техническое устройство
Сложное техническое устройство представляет собой каскад элементарных устройств (последовательность физических законов,
Техническое устройство
Сложное техническое устройство представляет собой каскад элементарных устройств (последовательность физических законов,
Слайд 10Управление
Там, где не справляется регулирование
Расчет плановой траектории достижения цели заново
Иногда отклонение от
Управление
Там, где не справляется регулирование
Расчет плановой траектории достижения цели заново
Иногда отклонение от
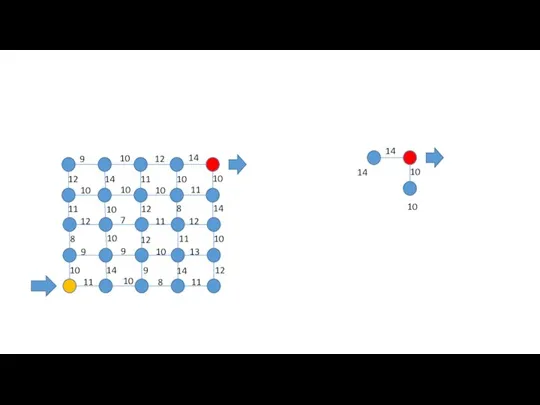
Слайд 11Управление
Найти наилучший путь (траекторию) от А до В
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
10
10
12
11
7
12
13
10
9
9
11
8
10
11
Линейное программирование. В.В. Леонтьев,
Управление
Найти наилучший путь (траекторию) от А до В
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
10
10
12
11
7
12
13
10
9
9
11
8
10
11
Линейное программирование. В.В. Леонтьев,
Слайд 1214
10
10
14
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
10
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
10
14
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
10
10
12
11
7
12
13
10
9
9
11
8
10
11
Слайд 1314
10
10
14
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
14
10
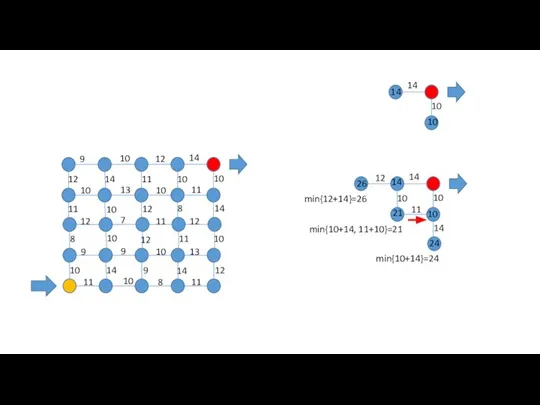
min{10+14, 11+10}=21
min{10+14}=24
min{12+14}=26
26
24
21
14
10
10
14
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
14
10
min{10+14, 11+10}=21
min{10+14}=24
min{12+14}=26
26
24
21
Слайд 1414
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
14
10
26
24
21
14
10
11
14
10
10
8
11
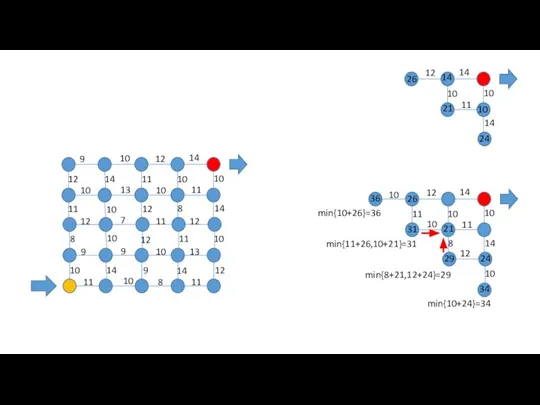
min{11+26,10+21}=31
min{10+26}=36
26
12
31
10
36
12
21
24
min{8+21,12+24}=29
min{10+24}=34
29
34
10
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
14
10
26
24
21
14
10
11
14
10
10
8
11
min{11+26,10+21}=31
min{10+26}=36
26
12
31
10
36
12
21
24
min{8+21,12+24}=29
min{10+24}=34
29
34
10
Слайд 1514
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
10
8
11
26
12
31
10
36
12
21
24
29
34
14
10
11
14
10
12
10
8
11
11
12
14
12
10
9
10
13
12
11
13
45
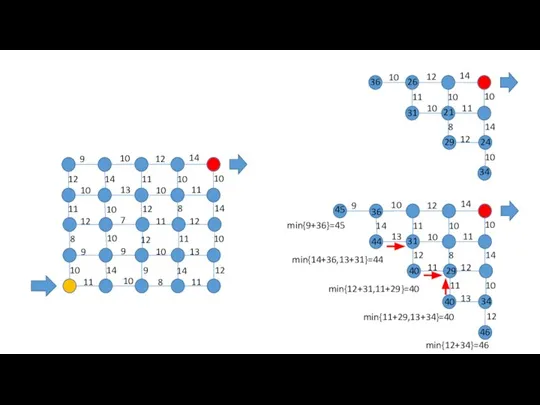
min{14+36,13+31}=44
min{12+31,11+29}=40
min{11+29,13+34}=40
min{12+34}=46
10
34
36
31
29
min{9+36}=45
44
40
40
46
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
10
8
11
26
12
31
10
36
12
21
24
29
34
14
10
11
14
10
12
10
8
11
11
12
14
12
10
9
10
13
12
11
13
45
min{14+36,13+31}=44
min{12+31,11+29}=40
min{11+29,13+34}=40
min{12+34}=46
10
34
36
31
29
min{9+36}=45
44
40
40
46
Слайд 1614
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
10
8
11
11
12
14
12
10
9
10
13
12
11
13
45
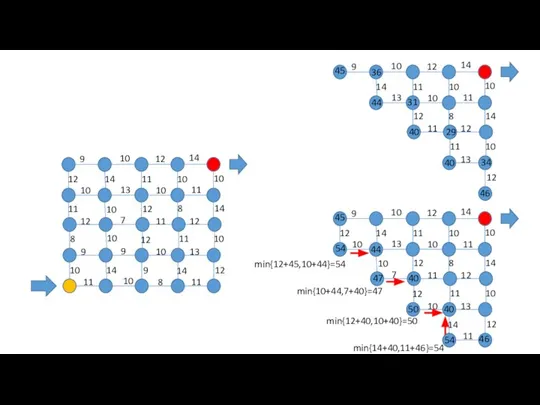
min{12+45,10+44}=54
min{10+44,7+40}=47
min{12+40,10+40}=50
min{14+40,11+46}=54
34
36
31
29
44
40
40
46
14
10
11
14
10
12
10
8
11
14
11
12
12
50
14
10
44
12
46
54
47
12
10
9
10
13
10
12
11
7
45
13
10
40
11
40
54
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
14
10
11
14
10
12
10
8
11
11
12
14
12
10
9
10
13
12
11
13
45
min{12+45,10+44}=54
min{10+44,7+40}=47
min{12+40,10+40}=50
min{14+40,11+46}=54
34
36
31
29
44
40
40
46
14
10
11
14
10
12
10
8
11
14
11
12
12
50
14
10
44
12
46
54
47
12
10
9
10
13
10
12
11
7
45
13
10
40
11
40
54
Слайд 1714
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
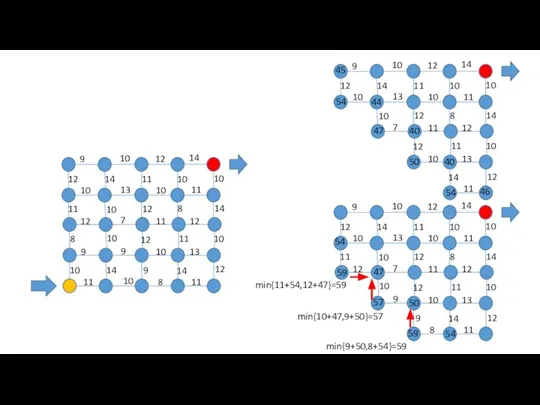
min{11+54,12+47}=59
min{10+47,9+50}=57
min{9+50,8+54}=59
14
10
11
14
10
12
10
8
11
14
11
12
12
50
14
10
44
12
46
54
47
12
10
9
10
13
10
12
11
7
45
13
10
40
11
40
54
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
12
11
12
10
9
10
13
10
12
11
7
12
13
10
9
11
8
59
54
47
50
54
59
57
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
min{11+54,12+47}=59
min{10+47,9+50}=57
min{9+50,8+54}=59
14
10
11
14
10
12
10
8
11
14
11
12
12
50
14
10
44
12
46
54
47
12
10
9
10
13
10
12
11
7
45
13
10
40
11
40
54
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
12
11
12
10
9
10
13
10
12
11
7
12
13
10
9
11
8
59
54
47
50
54
59
57
Слайд 1814
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
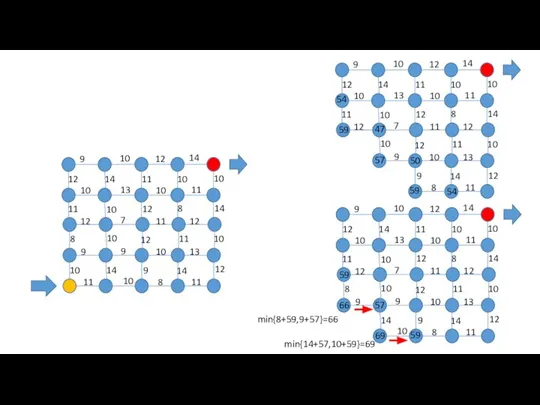
min{8+59,9+57}=66
min{14+57,10+59}=69
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
12
11
12
10
9
10
13
10
12
11
7
12
13
10
9
11
8
59
54
47
50
54
59
57
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
57
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
59
69
59
66
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
min{8+59,9+57}=66
min{14+57,10+59}=69
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
12
11
12
10
9
10
13
10
12
11
7
12
13
10
9
11
8
59
54
47
50
54
59
57
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
57
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
59
69
59
66
Слайд 1914
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
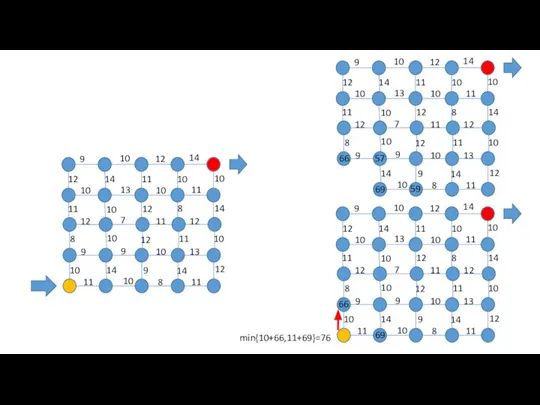
min{10+66,11+69}=76
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
57
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
59
69
59
66
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
10
66
66
69
14
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
min{10+66,11+69}=76
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
57
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
59
69
59
66
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
10
13
10
12
11
7
12
13
10
9
9
11
8
10
11
10
66
66
69
Слайд 20Управление
Найти наилучший путь (траекторию) от А до В
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
Длина оптимальной траектории =
Управление
Найти наилучший путь (траекторию) от А до В
14
10
11
14
10
12
10
8
11
14
11
12
12
9
14
10
10
14
12
11
8
10
12
10
9
Длина оптимальной траектории =
Слайд 21Домашнее задание
Найти наилучший и наихудший путь (траекторию) от А до В
4
3
6
8
1
2
5
1
1
4
5
7
2
4
Домашнее задание
Найти наилучший и наихудший путь (траекторию) от А до В
4
3
6
8
1
2
5
1
1
4
5
7
2
4
Слайд 22Домашнее задание
Найти наилучший и наихудший путь (траекторию) от А до В
4
3
5
8
1
2
5
1
1
4
5
7
2
4
1
4
2
8
4
10
11
Домашнее задание
Найти наилучший и наихудший путь (траекторию) от А до В
4
3
5
8
1
2
5
1
1
4
5
7
2
4
1
4
2
8
4
10
11
Слайд 23Домашнее задание
Найти наилучший путь (траекторию) от А до В
Длина пути =
Домашнее задание
Найти наилучший путь (траекторию) от А до В
Длина пути =
Слайд 24Домашнее задание
Найти наихудший путь (траекторию) от А до В
Длина пути = 16
4
3
5
8
1
2
5
1
1
4
5
7
2
4
1
5
3
10
5
15
16
Домашнее задание
Найти наихудший путь (траекторию) от А до В
Длина пути = 16
4
3
5
8
1
2
5
1
1
4
5
7
2
4
1
5
3
10
5
15
16
 Анализ установившихся и переходных режимов в системе электроснабжения 220/110 кВ
Анализ установившихся и переходных режимов в системе электроснабжения 220/110 кВ Общие сведения о системах первичного электроснабжения РЭС
Общие сведения о системах первичного электроснабжения РЭС Моделирование. Уравнения параболического типа. Лекция 4
Моделирование. Уравнения параболического типа. Лекция 4 Технологии и средства технического обслуживания машин и оборудования в агробизнесе
Технологии и средства технического обслуживания машин и оборудования в агробизнесе Исследование равновесия газ-твердое статическим методом
Исследование равновесия газ-твердое статическим методом Переходные процессы в линейных электрических цепях
Переходные процессы в линейных электрических цепях Рулевое управление и передняя подвеска
Рулевое управление и передняя подвеска Исследование фазового равновесия
Исследование фазового равновесия з-н сохр.имп
з-н сохр.имп Электрический ток в различных средах
Электрический ток в различных средах Финишные методы обработки
Финишные методы обработки Исследование параметров и характеристик полупроводниковых диодов. Лабораторная работа
Исследование параметров и характеристик полупроводниковых диодов. Лабораторная работа Формульный диктант Кинематика, законы Ньютона, сохранения, статика
Формульный диктант Кинематика, законы Ньютона, сохранения, статика Презентация на тему Условия плавания тел
Презентация на тему Условия плавания тел  Лазерные технологии
Лазерные технологии Элементарные частицы
Элементарные частицы Норийные ковши, скребки, ролики (пластиковые) для цепных транспортеров
Норийные ковши, скребки, ролики (пластиковые) для цепных транспортеров Современные теплообменные системы
Современные теплообменные системы Температура. Виды термометров
Температура. Виды термометров Ознакомление со статистическими закономерностями на механической модели
Ознакомление со статистическими закономерностями на механической модели Дифракция волн
Дифракция волн Метрология. Измерение электрической мощности. Точность измерений
Метрология. Измерение электрической мощности. Точность измерений Презентация на тему Электростатика Лекция
Презентация на тему Электростатика Лекция  Электроизмерительные приборы
Электроизмерительные приборы Освещение. Свет и тень
Освещение. Свет и тень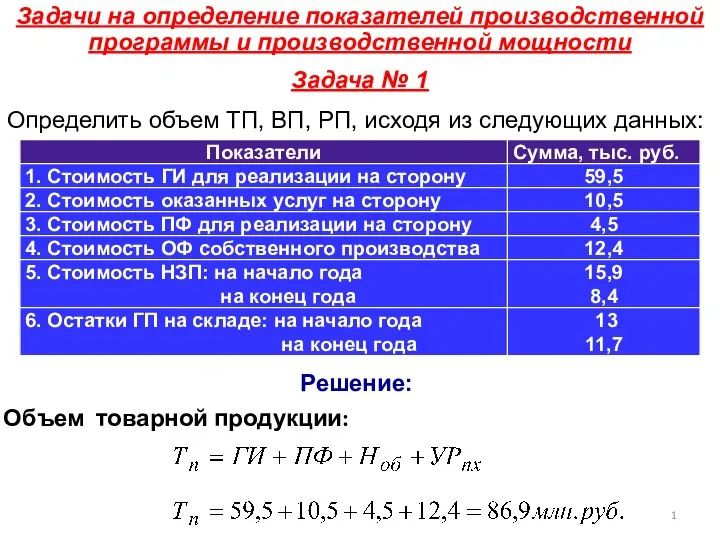 Задачи на определение показателей производственной программы и производственной мощности
Задачи на определение показателей производственной программы и производственной мощности Презентация на тему Физика атомного ядра
Презентация на тему Физика атомного ядра  Электромагнетизм. Магнитное поле. Сила Лоренца
Электромагнетизм. Магнитное поле. Сила Лоренца