- Управляемость. Тема 6

Содержание
- 2. ОПРЕДЕЛЕНИЯ. Управление автомобилем является главной производственной функцией водителя. Основным назначением автотранспортных средств является перемещение грузов или
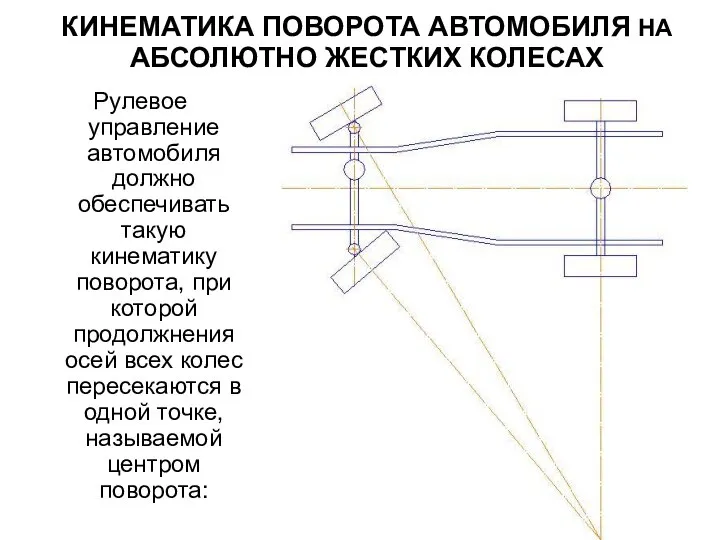
- 3. Рулевое управление автомобиля должно обеспечивать такую кинематику поворота, при которой продолжнения осей всех колес пересекаются в
- 4. СИЛОВОЙ УВОД ШИНЫ В обычном понимании шина едет прямо, однако, т.к. она не твердая а эластичная,
- 5. НА СОПРОТИВЛЕНИЕ СИЛОВОМУ УВОДУ ШИНЫ ВЛИЯЮТ СЛЕДУЮЩИЕ ФАКТОРЫ: Конструкция шины (например радиальная жестче диагональной, но и
- 6. Соотношение ширины профиля шины и ширины диска. Чем шире диск, тем лучше шина сопротивляется силовому уводу.
- 7. КИНЕМАТИЧЕСКИЙ УВОД КОЛЕСА Крен кузова может вызвать наклон колеса по отношению к плоскости дороги. Зависимая подвеска
- 8. ВЛИЯНИЕ ТИПА ПРИВОДА НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ Передний привод Склонен к недостаточной повроачиваемости. Т.к. наличие тяги на
- 12. Процесс поворота состоит из входа в поворот, движения с постоянным радиусом (этот этап может отсутствовать) и
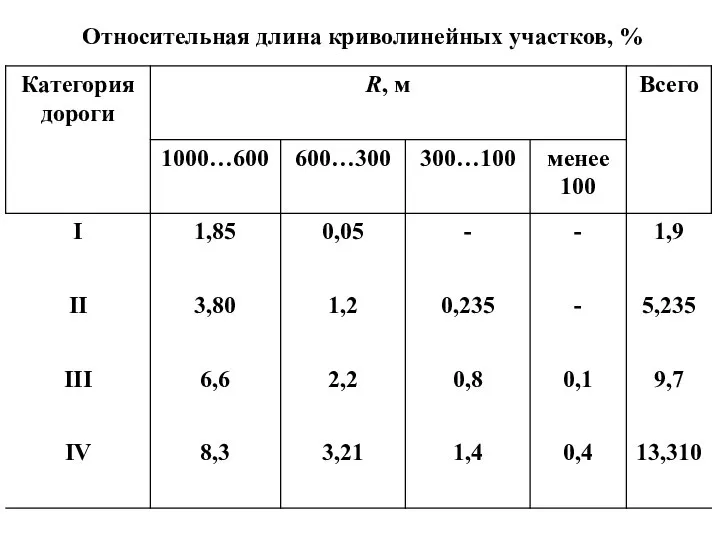
- 13. Относительная длина криволинейных участков, %
- 14. Движение автомобиля как механической системы может определяться траекторией какой-либо ее точки (направляющая точка), углом поворота некоторой
- 15. Поэтому при изучении управляемости ограничиваются рассмотрением законов изменения курсового угла γ, а также бокового смещения у
- 16. У подавляющего большинства автомобилей изменение курсовых и боковых параметров движения осуществляется в результате поворота рулевого колеса
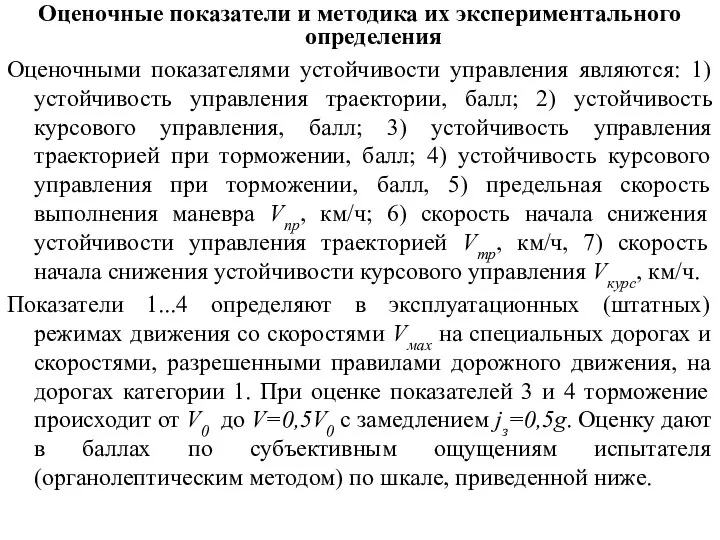
- 17. Оценочные показатели и методика их экспериментального определения Оценочными показателями устойчивости управления являются: 1) устойчивость управления траектории,
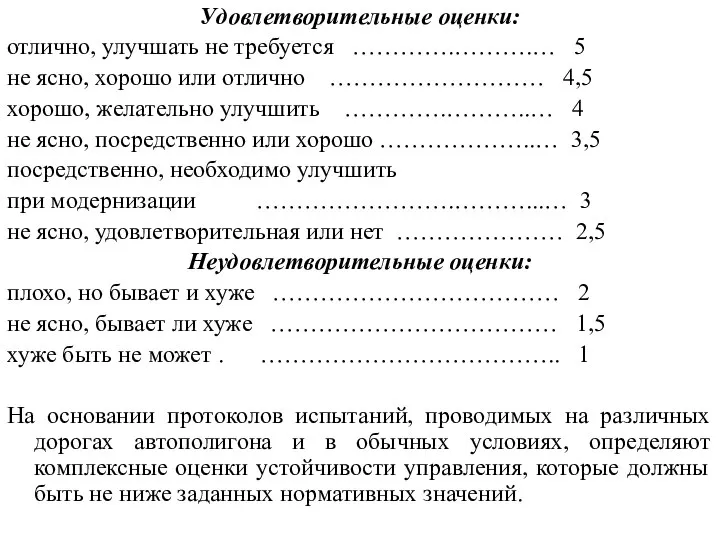
- 18. Удовлетворительные оценки: отлично, улучшать не требуется ………….……….… 5 не ясно, хорошо или отлично ……………………… 4,5 хорошо,
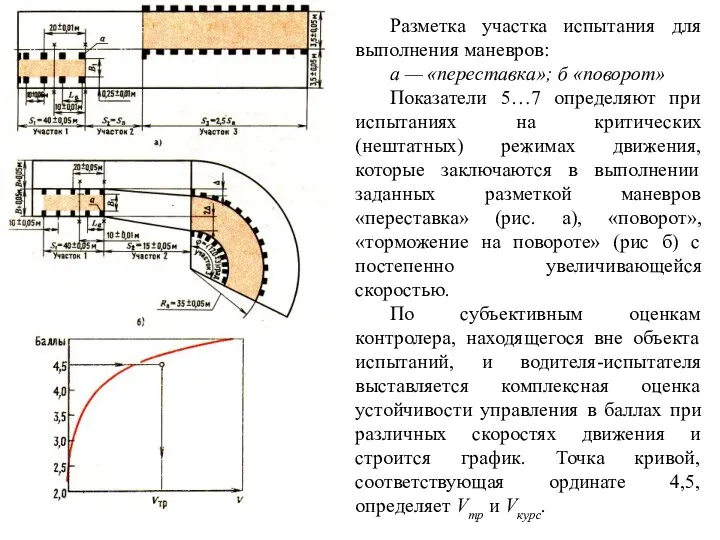
- 20. Разметка участка испытания для выполнения маневров: а — «переставка»; б «поворот» Показатели 5…7 определяют при испытаниях
- 21. Кроме этого, имеется целый ряд показателей и характеристик, из которого для оценки управляемости могут быть выделены
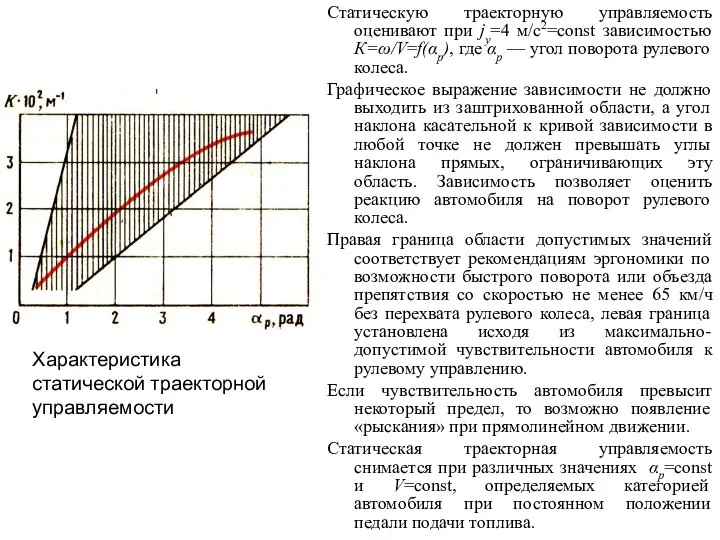
- 22. Статическую траекторную управляемость оценивают при jy=4 м/c2=const зависимостью К=ω/V=f(αp), где αp — угол поворота рулевого колеса.
- 23. Контрольные вопросы Какие основные понятия и определения используют при изучении раздела Управляемость? Что такое управляемость автомобиля?
- 25. Скачать презентацию
Слайд 2ОПРЕДЕЛЕНИЯ.
Управление автомобилем является главной производственной функцией водителя. Основным назначением автотранспортных средств
ОПРЕДЕЛЕНИЯ.
Управление автомобилем является главной производственной функцией водителя. Основным назначением автотранспортных средств
Слайд 3Рулевое управление автомобиля должно обеспечивать такую кинематику поворота, при которой продолжнения осей
Рулевое управление автомобиля должно обеспечивать такую кинематику поворота, при которой продолжнения осей
Слайд 4СИЛОВОЙ УВОД ШИНЫ
В обычном понимании шина едет прямо, однако, т.к. она не
СИЛОВОЙ УВОД ШИНЫ
В обычном понимании шина едет прямо, однако, т.к. она не
Слайд 5НА СОПРОТИВЛЕНИЕ СИЛОВОМУ УВОДУ ШИНЫ ВЛИЯЮТ СЛЕДУЮЩИЕ ФАКТОРЫ:
Конструкция шины (например радиальная жестче
НА СОПРОТИВЛЕНИЕ СИЛОВОМУ УВОДУ ШИНЫ ВЛИЯЮТ СЛЕДУЮЩИЕ ФАКТОРЫ:
Конструкция шины (например радиальная жестче
Слайд 6Соотношение ширины профиля шины и ширины диска. Чем шире диск, тем лучше
Соотношение ширины профиля шины и ширины диска. Чем шире диск, тем лучше
Слайд 7КИНЕМАТИЧЕСКИЙ УВОД КОЛЕСА
Крен кузова может вызвать наклон колеса по отношению к плоскости
КИНЕМАТИЧЕСКИЙ УВОД КОЛЕСА Крен кузова может вызвать наклон колеса по отношению к плоскости
Слайд 8ВЛИЯНИЕ ТИПА ПРИВОДА НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
Передний привод
Склонен к недостаточной повроачиваемости. Т.к. наличие
ВЛИЯНИЕ ТИПА ПРИВОДА НА УПРАВЛЯЕМОСТЬ АВТОМОБИЛЯ
Передний привод
Склонен к недостаточной повроачиваемости. Т.к. наличие



Слайд 12Процесс поворота состоит из входа в поворот, движения с постоянным радиусом (этот
Процесс поворота состоит из входа в поворот, движения с постоянным радиусом (этот
Слайд 13 Относительная длина криволинейных участков, %
Относительная длина криволинейных участков, %
Слайд 14Движение автомобиля как механической системы может определяться траекторией какой-либо ее точки (направляющая
Движение автомобиля как механической системы может определяться траекторией какой-либо ее точки (направляющая
Слайд 15Поэтому при изучении управляемости ограничиваются рассмотрением законов изменения курсового угла γ, а
Поэтому при изучении управляемости ограничиваются рассмотрением законов изменения курсового угла γ, а
Слайд 16У подавляющего большинства автомобилей изменение курсовых и боковых параметров движения осуществляется в
У подавляющего большинства автомобилей изменение курсовых и боковых параметров движения осуществляется в
Слайд 17Оценочные показатели и методика их экспериментального определения
Оценочными показателями устойчивости управления являются: 1)
Оценочные показатели и методика их экспериментального определения
Оценочными показателями устойчивости управления являются: 1)
Слайд 18Удовлетворительные оценки:
отлично, улучшать не требуется ………….……….… 5
не ясно, хорошо или отлично
Удовлетворительные оценки:
отлично, улучшать не требуется ………….……….… 5
не ясно, хорошо или отлично

Слайд 20Разметка участка испытания для выполнения маневров:
а — «переставка»; б «поворот»
Показатели 5…7
Разметка участка испытания для выполнения маневров:
а — «переставка»; б «поворот»
Показатели 5…7
Слайд 21Кроме этого, имеется целый ряд показателей и характеристик, из которого для оценки
Кроме этого, имеется целый ряд показателей и характеристик, из которого для оценки

Слайд 22Статическую траекторную управляемость оценивают при jy=4 м/c2=const зависимостью К=ω/V=f(αp), где αp —
Статическую траекторную управляемость оценивают при jy=4 м/c2=const зависимостью К=ω/V=f(αp), где αp —
Слайд 23Контрольные вопросы
Какие основные понятия и определения используют при изучении раздела Управляемость?
Что такое
Контрольные вопросы
Какие основные понятия и определения используют при изучении раздела Управляемость?
Что такое
 Презентация на тему Постулаты Бора (11 класс)
Презентация на тему Постулаты Бора (11 класс)  Ток в электролитах
Ток в электролитах Молекулярная физика и термодинамика
Молекулярная физика и термодинамика Презентация на тему Механические колебания и волны. Звук
Презентация на тему Механические колебания и волны. Звук 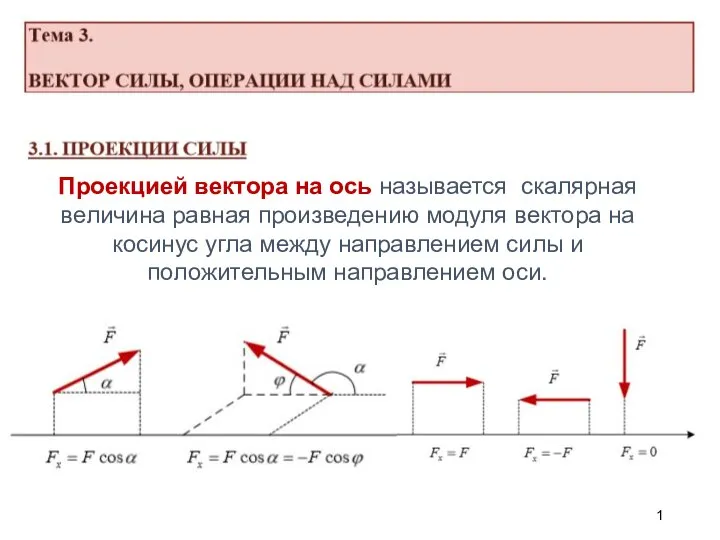 Вектор силы, операции над силами
Вектор силы, операции над силами Презентация на тему Спектры и спектральный анализ
Презентация на тему Спектры и спектральный анализ  Акустичне явище грім
Акустичне явище грім Презентация на тему Снег
Презентация на тему Снег  Соломаха
Соломаха Методическая разработка по применению первого закона термодинамики к решению графических задач
Методическая разработка по применению первого закона термодинамики к решению графических задач Механика. Обобщающий урок. 10 класс
Механика. Обобщающий урок. 10 класс Размерность
Размерность Основа классической динамики – три закона Ньютона (1686 год)
Основа классической динамики – три закона Ньютона (1686 год) Подвеска автомобиля
Подвеска автомобиля Основы теории сплавов. Типы сплавов. Диаграммы состояния сплавов, принцип их построения. (Лекция 2)
Основы теории сплавов. Типы сплавов. Диаграммы состояния сплавов, принцип их построения. (Лекция 2) Квантовая механика
Квантовая механика Изучение характера движения тела, скатывающегося по наклонной плоскости
Изучение характера движения тела, скатывающегося по наклонной плоскости Физика
Физика Ресорне підвішування
Ресорне підвішування Распространение радиоволн
Распространение радиоволн Профилактика отечественного котла после 5 лет эксплуатации
Профилактика отечественного котла после 5 лет эксплуатации Построение изображеия в линзах и формула линзы. 11 класс
Построение изображеия в линзах и формула линзы. 11 класс Генератор виброакустической помехи
Генератор виброакустической помехи Попов – основатель радиовещания
Попов – основатель радиовещания Уплотняющие и опорные органы сельскохозяйственных машин
Уплотняющие и опорные органы сельскохозяйственных машин Развитие двигателя внутреннего сгорания
Развитие двигателя внутреннего сгорания задачи на равноускоренное движение (1)
задачи на равноускоренное движение (1) Задачи по технической механике. Сложение ускорений
Задачи по технической механике. Сложение ускорений