- Датчики положения и перемещения в робототехнике (ДПП). Основные понятия и определения

Содержание
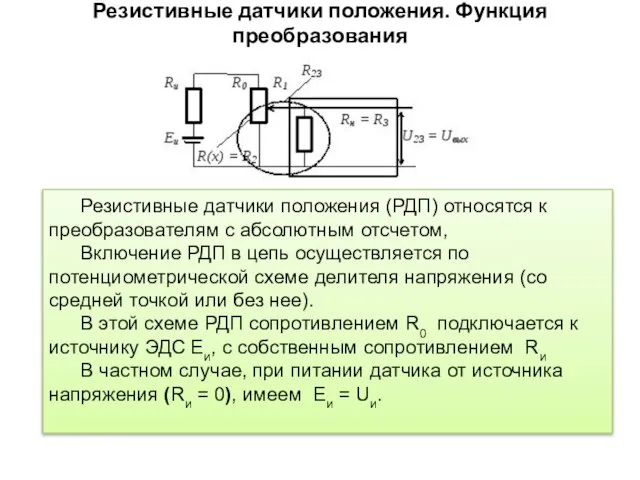
- 2. Резистивные датчики положения. Функция преобразования Резистивные датчики положения (РДП) относятся к преобразователям с абсолютным отсчетом, Включение
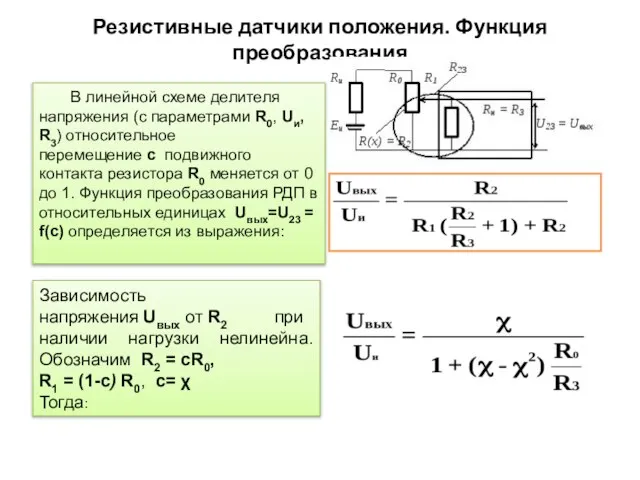
- 3. Резистивные датчики положения. Функция преобразования В линейной схеме делителя напряжения (с параметрами R0, Uи, R3) относительное
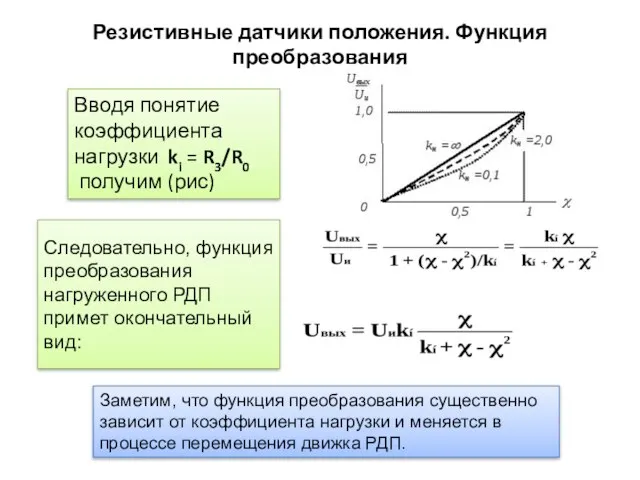
- 4. Резистивные датчики положения. Функция преобразования Вводя понятие коэффициента нагрузки ki = R3/R0 получим (рис) Следовательно, функция
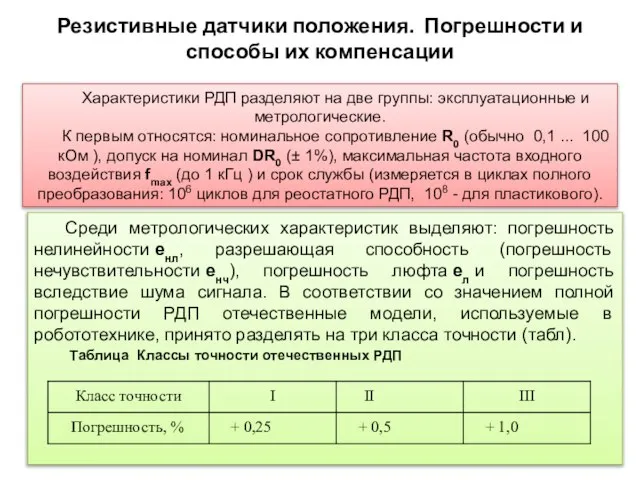
- 5. Резистивные датчики положения. Погрешности и способы их компенсации Характеристики РДП разделяют на две группы: эксплуатационные и
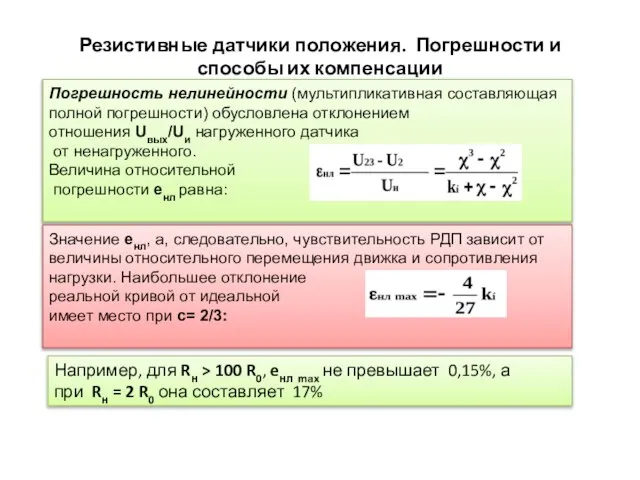
- 6. Погрешность нелинейности (мультипликативная составляющая полной погрешности) обусловлена отклонением отношения Uвых/Uи нагруженного датчика от ненагруженного. Величина относительной
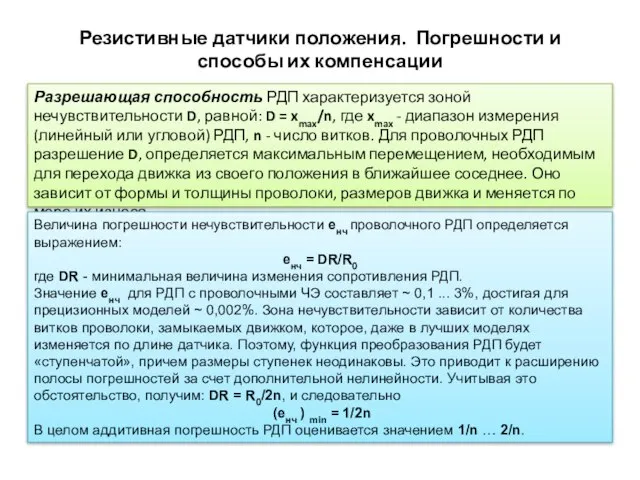
- 7. Резистивные датчики положения. Погрешности и способы их компенсации Разрешающая способность РДП характеризуется зоной нечувствительности D, равной:
- 9. Скачать презентацию
Слайд 2
Резистивные датчики положения. Функция преобразования
Резистивные датчики положения (РДП) относятся к преобразователям с
Резистивные датчики положения. Функция преобразования
Резистивные датчики положения (РДП) относятся к преобразователям с
Слайд 3Резистивные датчики положения. Функция преобразования
В линейной схеме делителя напряжения (с параметрами R0, Uи, R3)
Резистивные датчики положения. Функция преобразования
В линейной схеме делителя напряжения (с параметрами R0, Uи, R3)
Слайд 4Резистивные датчики положения. Функция преобразования
Вводя понятие коэффициента нагрузки ki = R3/R0
получим (рис)
Следовательно, функция
Резистивные датчики положения. Функция преобразования
Вводя понятие коэффициента нагрузки ki = R3/R0
получим (рис)
Следовательно, функция
Слайд 5
Резистивные датчики положения. Погрешности и способы их компенсации
Характеристики РДП разделяют на две
Резистивные датчики положения. Погрешности и способы их компенсации
Характеристики РДП разделяют на две
Слайд 6Погрешность нелинейности (мультипликативная составляющая полной погрешности) обусловлена отклонением отношения Uвых/Uи нагруженного датчика
от ненагруженного.
Величина
Погрешность нелинейности (мультипликативная составляющая полной погрешности) обусловлена отклонением отношения Uвых/Uи нагруженного датчика
от ненагруженного.
Величина
Слайд 7Резистивные датчики положения. Погрешности и способы их компенсации
Разрешающая способность РДП характеризуется зоной нечувствительности D,
Резистивные датчики положения. Погрешности и способы их компенсации
Разрешающая способность РДП характеризуется зоной нечувствительности D,
 Косинус Пи. Профессиональный живой переводчик в смартфоне
Косинус Пи. Профессиональный живой переводчик в смартфоне Воздушно-космическая деятельность
Воздушно-космическая деятельность Регистры x86-64. Компьютерные основы программирования. Представление программ, часть 4
Регистры x86-64. Компьютерные основы программирования. Представление программ, часть 4 Представление чисел в компьютере. Двоичная система счисления. Двоичная арифметика
Представление чисел в компьютере. Двоичная система счисления. Двоичная арифметика Информатика. Алгоритмический язык. Лекция 8
Информатика. Алгоритмический язык. Лекция 8 Презентация на тему Персональный компьютер
Презентация на тему Персональный компьютер  Лекция 4 информационные процессы
Лекция 4 информационные процессы Lection_5
Lection_5 Объект, Виды объектов
Объект, Виды объектов Разработка кроссплатформенного приложения WMT
Разработка кроссплатформенного приложения WMT презентация Информация и ее свойства
презентация Информация и ее свойства Архитектура Oracle. Процессы и потоки Windows (лекция 6)
Архитектура Oracle. Процессы и потоки Windows (лекция 6) Своя игра по информатике
Своя игра по информатике Виды и свойства информации
Виды и свойства информации Компьютерная графика
Компьютерная графика Как сдать экзамен
Как сдать экзамен Профессия оператор ЭВМ
Профессия оператор ЭВМ Доступные инструкции как пользоваться Сбербанк Онлайн для ваших близких старшего поколения
Доступные инструкции как пользоваться Сбербанк Онлайн для ваших близких старшего поколения Базовые алгоритмические конструкции
Базовые алгоритмические конструкции Разработка проектов приграничного сотрудничества
Разработка проектов приграничного сотрудничества ТЕМА: «ОПЕРАТОР ВЫБОРА CASE»
ТЕМА: «ОПЕРАТОР ВЫБОРА CASE» Письменные источники информации
Письменные источники информации Средства защиты информации
Средства защиты информации Доброе утро 3.0
Доброе утро 3.0 Пакет подготовки презентаций
Пакет подготовки презентаций Поиск в массиве
Поиск в массиве Использование компьютерной графики для реконструкции неочевидных обстоятельств в расследовании дорожно-транспортных происшествий
Использование компьютерной графики для реконструкции неочевидных обстоятельств в расследовании дорожно-транспортных происшествий Лекция 1 для МиКвКС
Лекция 1 для МиКвКС