- Гибридные моделирующие комплексы

Содержание
- 2. В практике машинного моделирования сложных систем используется вычислительная техника трех типов: ЭВМ(электронная вычислительная машина), АВМ (аналоговая
- 3. Рассмотрим достоинства и недостатки этих трех типов вычислительных средств (АВМ, ЭВМ и ГВК) применительно к машинному
- 4. 5) операции сложения, вычитания, умножения, дифференцирования, интегрирования, генерирования непрерывных функций выполняются весьма эффективно, но имеются ограниченные
- 5. Характерные черты ЭВМ: 1) вся обработка промежуточной и результирующей информации в процессе моделирования системы S реализуется
- 6. 6) применяется ограниченное число арифметических операций(сложение, вычитание, умножение и деление), но с помощью численных методов можно
- 7. При этом цифровая часть ГВК дает возможность: 1) управлять аналоговой частью машинной модели Мм при высоком
- 8. Преимущества ГВК: 1) сочетает быстродействие АВМ и точность ЭВМ, что позволяет расширить класс моделируемых объектов; 2)
- 9. Говорить о преимуществах и недостатках ГВК можно применительно к машинному моделированию конкретного класса систем S. Для
- 10. Для сложных динамических объектов перспективным является моделирование на базе ГВК, которые реализуют преимущества цифрового и аналогового
- 11. Состав и структура технического обеспечения АЦМК определяется множеством задач, на решение которых он ориентирован. В общем
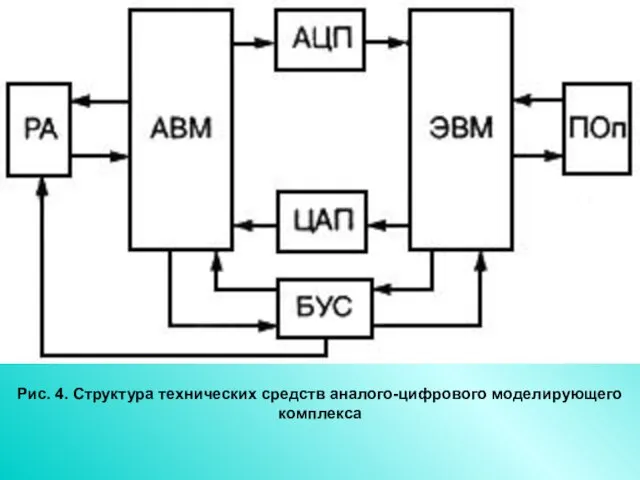
- 12. Рис. 4. Структура технических средств аналого-цифрового моделирующего комплекса
- 13. Преобразователи АЦП и ЦАП являются средствами организации информационных связей между АВМ и ЭВМ, т. е. средствами
- 14. Оператор управляет процессом моделирования с помощью средств, номенклатура которых определяется задачами, решаемыми на АЦМК. В состав
- 15. Аналого-ориентированные комплексы используются в тех случаях, когда не требуется высокая точность результатов и когда моделируемая система
- 16. К цифро-ориентированным комплексам можно отнести универсальные ЭВМ, где для отображения и регистрации результатов используются аналоговые средства
- 17. Сбалансированные (универсальные) комплексы являются самым мощным средством для решения задач аналого-цифрового моделирования. В их состав входят
- 18. Задача построения технического обеспечения АЦМК в настоящее время сводится к выбору стандартной аппаратуры, разработке информационных и
- 19. Современные АВМ, как правило, позволяют осуществлять цифровое управление. Принципиальных трудностей в построении технического обеспечения АЦМК нет.
- 20. Следует ответить на вопросы: требуется ли работа в реальном масштабе времени, какие устройства должны быть включены
- 21. Прежде всего нужно обосновать преимущества гибридного моделирования системы перед аналоговым или цифровым. При этом задачи, для
- 22. Сложность перечисленных вопросов заключается в том, что большинство из них взаимосвязаны. От правильности их решения зависит
- 23. Логическая компоновка подразумевает выбор минимального состава устройств, агрегатов и модулей из номенклатуры определенных семейств вычислительной техники,
- 24. Опишем вариант построения АЦМК для решения задачи моделирования системы S на базе управляющей ЭВМ, которая имеет
- 25. Рассмотрим особенности компоновки устройств организации информационных и управляющих связей между ЭВМ и АВМ. Вариант использования ЭВМ
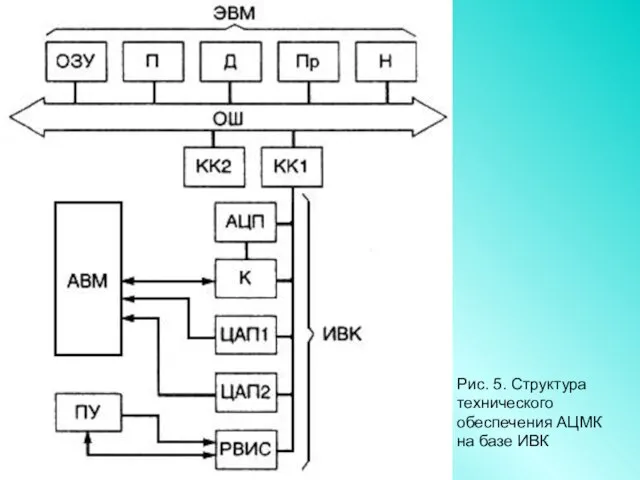
- 26. Пример 1. Рассмотрим возможности построения технического обеспечения АЦМК на базе ИВК (рис. 5.5). В данной структуре
- 27. Рис. 5. Структура технического обеспечения АЦМК на базе ИВК
- 28. Развитая операционная система современных ЭВМ позволяет реализовать на их основе процедуры генерации цифровой части модели Мм,
- 29. Программное обеспечение (ПО) АЦМК (рис. 6) строится по модульному принципу и включает в себя комплексы программ:
- 30. Рис. 6. Распределение задач моделирования по средствам АЦМК
- 31. Пример 2. Рассмотрим состав ПО АЦМК. В зависимости от вида модели конкретной системы S ППП пользователя
- 32. Решая задачу моделирования конкретной системы S, пользователь может отказаться от использования тех или иных программ. MONIT
- 33. Наиболее сложная часть ПО - комплекс программных средств ЭВМ. Не останавливаясь на рассмотрении операционной системы MODOS,
- 34. Использование модульной структуры и организации ПО моделирования позволяет в режиме генерации создавать ППМ конкретной системы S,
- 35. Тема КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ НА МИКРОУРОВНЕ
- 36. Объекты компьютерного моделирования на микроуровне
- 37. Микроуровень – это нижний иерархический уровень декомпозиции объектов проектирования по степени абстрагирования при составлении математического описания.
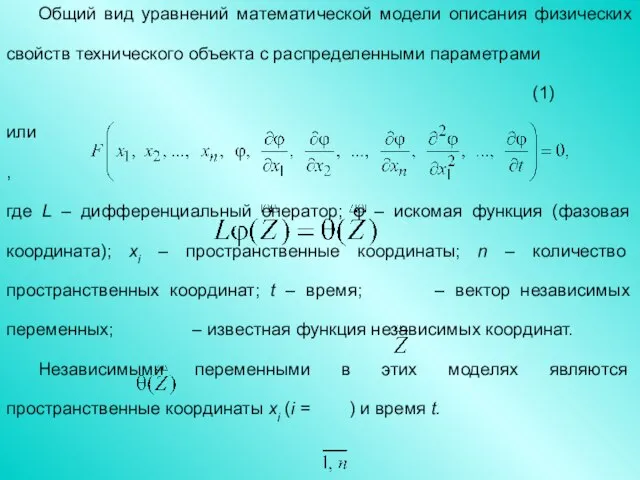
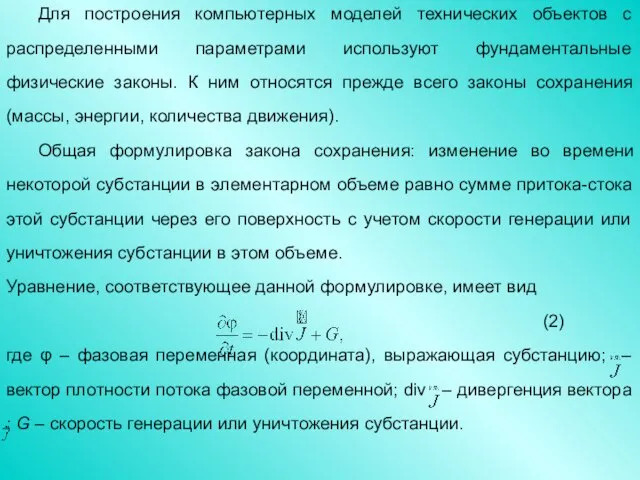
- 38. Общий вид уравнений математической модели описания физических свойств технического объекта с распределенными параметрами (1) или ,
- 39. Если уравнение содержит одну фазовую переменную, система описывается одним уравнением вида (1), если несколько фазовых переменных,
- 40. Уравнение (1) имеет множество решений. Для получения единственного решения необходимо задать краевые условия, включающие граничные и
- 41. Существует несколько стандартных способов задания граничных условий. Для теплового объекта, представляющего собой твердое гомогенное (однородное) тело,
- 42. Объекты с распределенными параметрами могут быть различной физической природы: электрические, механические, тепловые, гидравлические, магнитные и др.
- 43. При анализе гидравлических и пневматических систем определяют режимы течения сплошных потоков жидкостей и газов, характеризуемые скоростями
- 44. Основы построения компьютерных моделей элементов систем на микроуровне
- 45. Для построения компьютерных моделей технических объектов с распределенными параметрами используют фундаментальные физические законы. К ним относятся
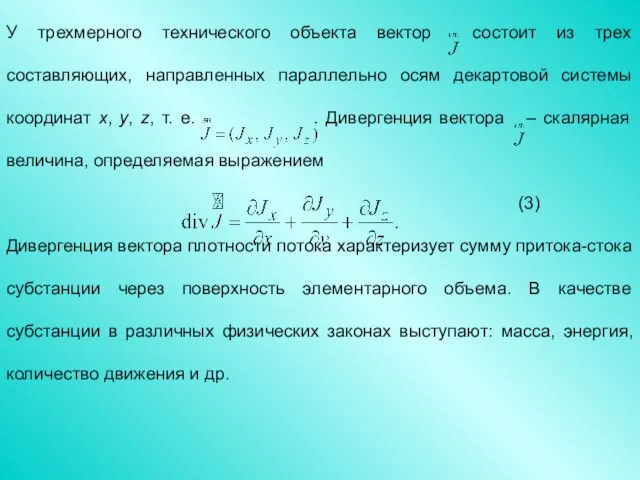
- 46. У трехмерного технического объекта вектор состоит из трех составляющих, направленных параллельно осям декартовой системы координат х,
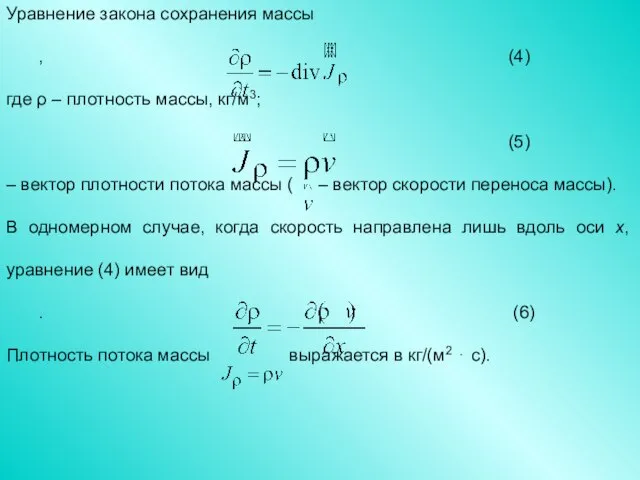
- 47. Уравнение закона сохранения массы , (4) где ρ – плотность массы, кг/м3; (5) – вектор плотности
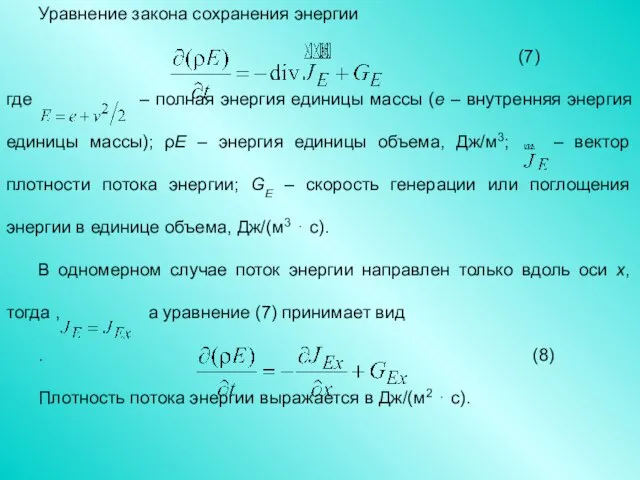
- 48. Уравнение закона сохранения энергии (7) где – полная энергия единицы массы (е – внутренняя энергия единицы
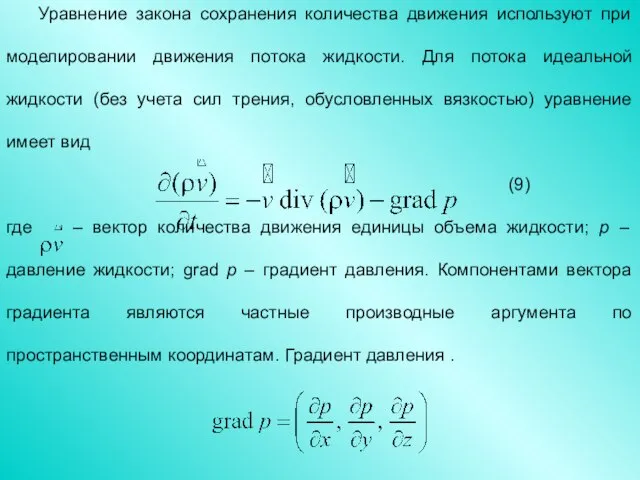
- 49. Уравнение закона сохранения количества движения используют при моделировании движения потока жидкости. Для потока идеальной жидкости (без
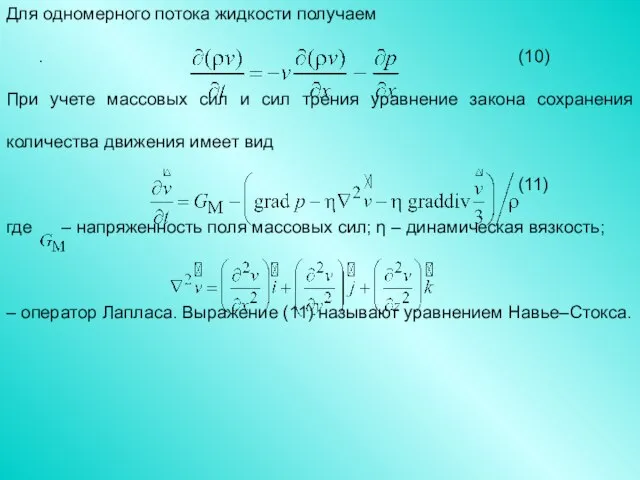
- 50. Для одномерного потока жидкости получаем . (10) При учете массовых сил и сил трения уравнение закона
- 51. Модели механических подсистем на микроуровне
- 52. Надежность работы ПрМ определяется рациональным выбором геометрических параметров входящих в их состав механических элементов. Форма и
- 53. Современные методы анализа напряженно-деформированного состояния несущих элементов различных технических систем базируются на использовании моделей с распределенными
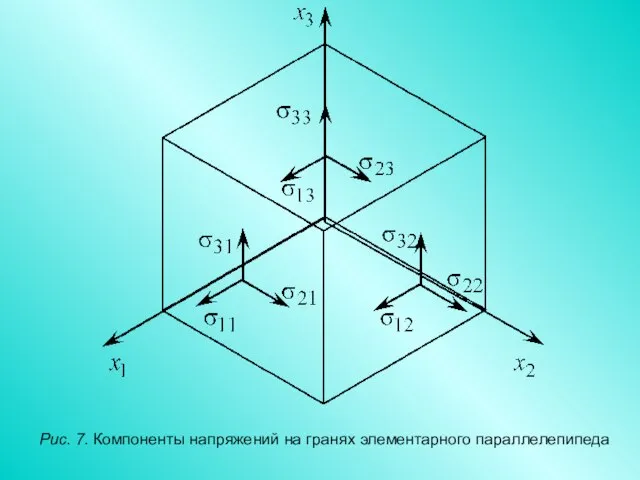
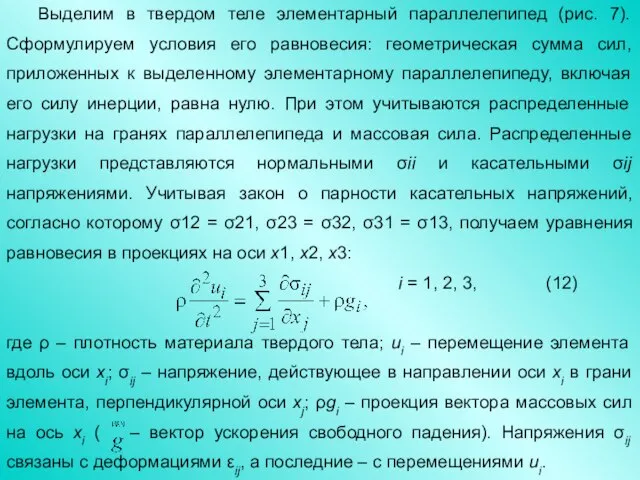
- 54. Рис. 7. Компоненты напряжений на гранях элементарного параллелепипеда
- 55. Выделим в твердом теле элементарный параллелепипед (рис. 7). Сформулируем условия его равновесия: геометрическая сумма сил, приложенных
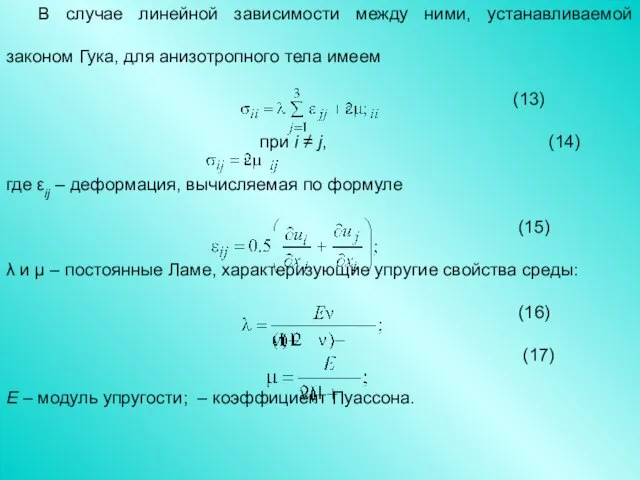
- 56. В случае линейной зависимости между ними, устанавливаемой законом Гука, для анизотропного тела имеем (13) при i
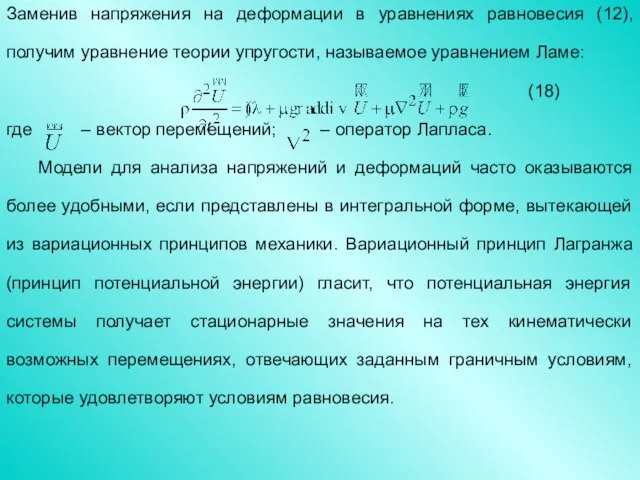
- 57. Заменив напряжения на деформации в уравнениях равновесия (12), получим уравнение теории упругости, называемое уравнением Ламе: (18)
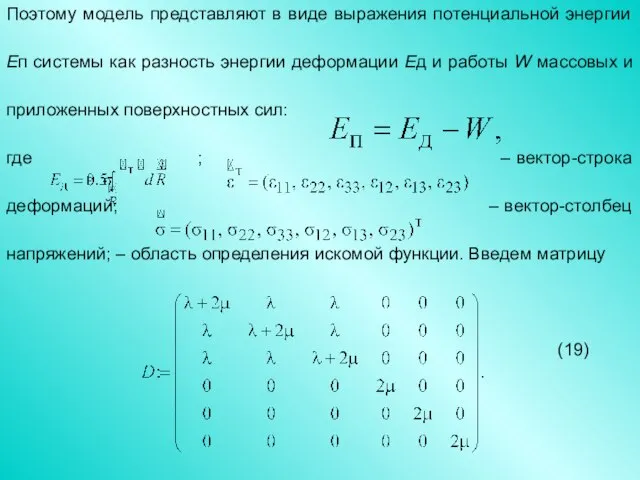
- 58. Поэтому модель представляют в виде выражения потенциальной энергии Еп системы как разность энергии деформации Ед и
- 59. Используя матрицу (19), уравнения (13) и (14) можно записать в лаконичной форме (20) При использовании принципа
- 60. Модели тепловых систем на микроуровне
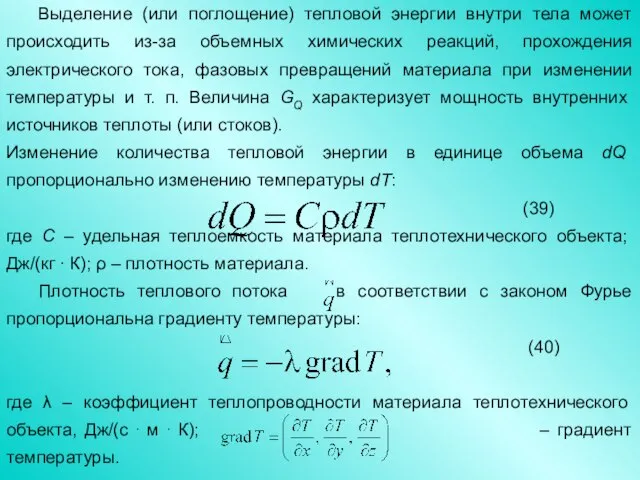
- 61. Теплообмен может осуществляться теплопроводностью, конвекцией и тепловым излучением. Температурным полем называется совокупность значений температуры для всех
- 62. Уравнение теплопроводности может быть получено на основе закона сохранения энергии. Применительно к тепловой системе закон сохранения
- 63. Выделение (или поглощение) тепловой энергии внутри тела может происходить из-за объемных химических реакций, прохождения электрического тока,
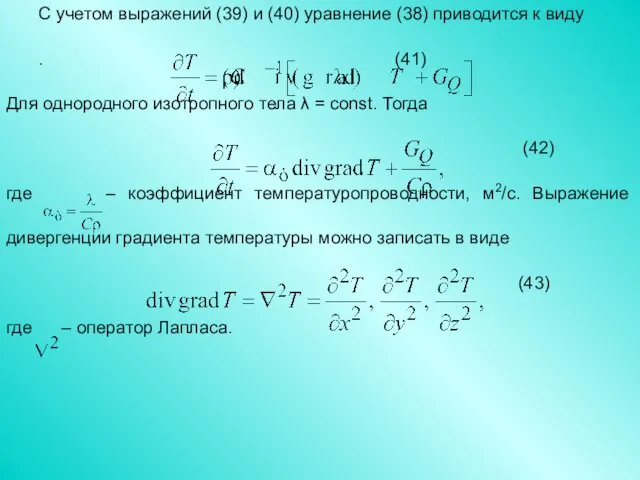
- 64. С учетом выражений (39) и (40) уравнение (38) приводится к виду . (41) Для однородного изотропного
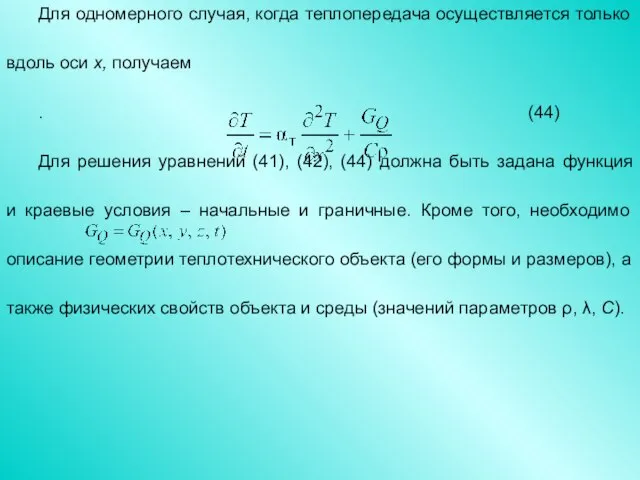
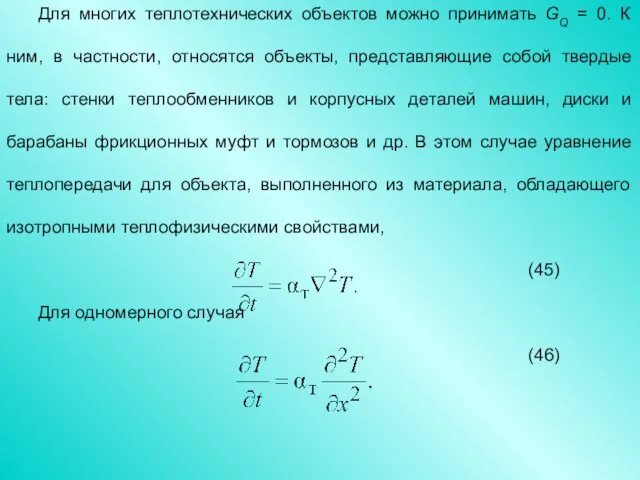
- 65. Для одномерного случая, когда теплопередача осуществляется только вдоль оси х, получаем . (44) Для решения уравнений
- 66. Для многих теплотехнических объектов можно принимать GQ = 0. К ним, в частности, относятся объекты, представляющие
- 67. При описании граничных условий в зависимости от наличия информации о теплообмене на граничной поверхности принимают различные
- 68. Учитывая формулу (40), можно отметить, что граничные условия второго рода характеризуют распределение плотности теплового потока на
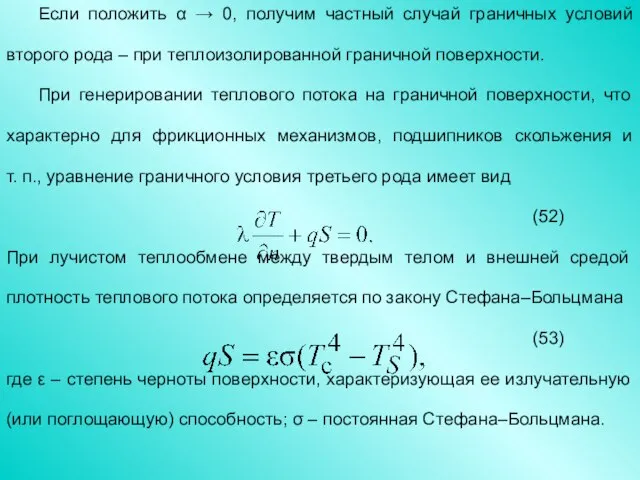
- 69. Граничные условия третьего рода позволяют конкретизировать характеристики теплообмена с внешней средой. При этом задается распределение плотности
- 70. Уравнение (50) выражает закон Ньютона. Принимая во внимание, что, согласно выражению (40), модуль вектора плотности теплового
- 71. Если положить α → 0, получим частный случай граничных условий второго рода – при теплоизолированной граничной
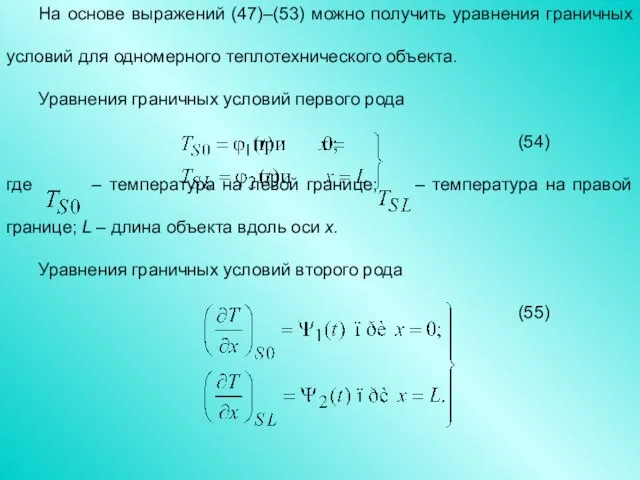
- 72. На основе выражений (47)–(53) можно получить уравнения граничных условий для одномерного теплотехнического объекта. Уравнения граничных условий
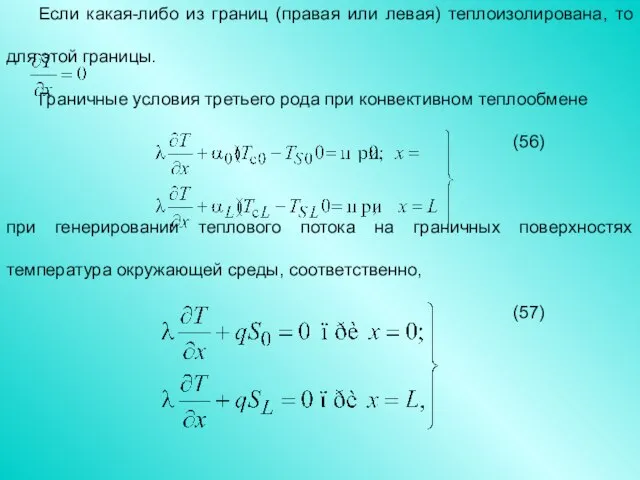
- 73. Если какая-либо из границ (правая или левая) теплоизолирована, то для этой границы. Граничные условия третьего рода
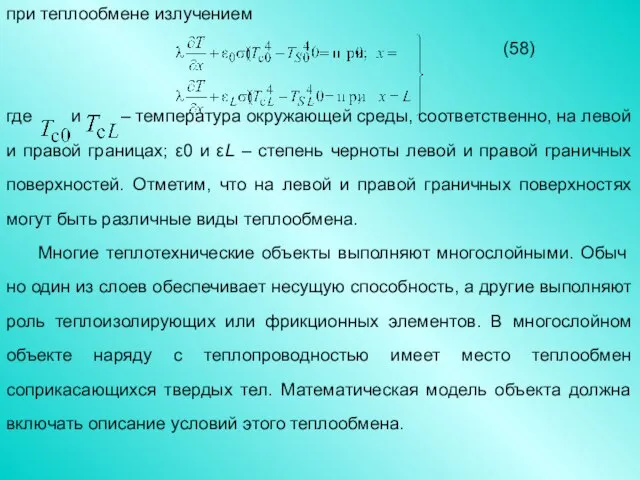
- 74. при теплообмене излучением (58) где и – температура окружающей среды, соответственно, на левой и правой границах;
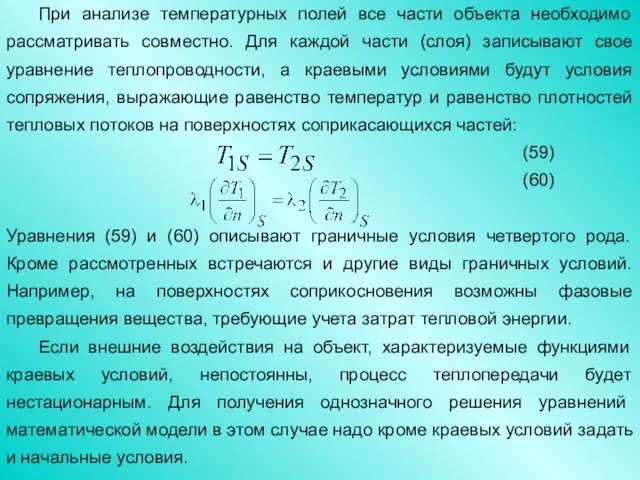
- 75. При анализе температурных полей все части объекта необходимо рассматривать совместно. Для каждой части (слоя) записывают свое
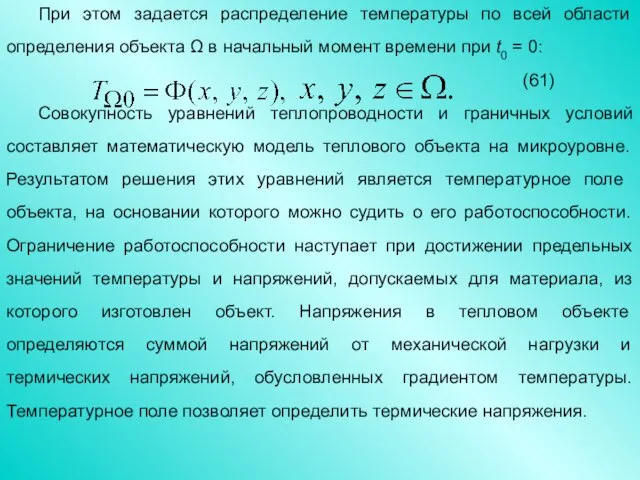
- 76. При этом задается распределение температуры по всей области определения объекта Ω в начальный момент времени при
- 77. Пример разработки модели
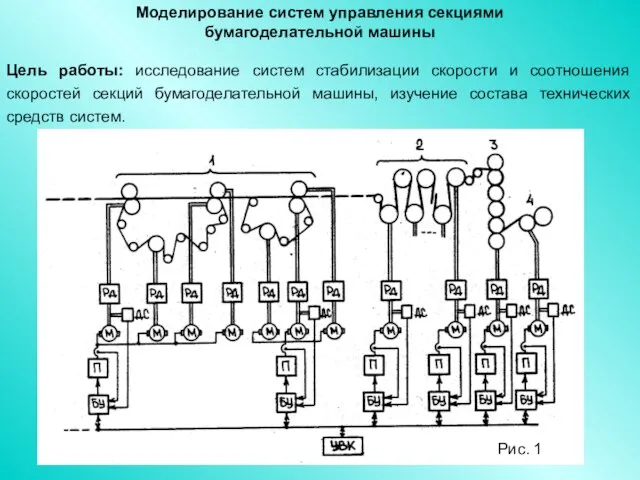
- 78. Моделирование систем управления секциями бумагоделательной машины Цель работы: исследование систем стабилизации скорости и соотношения скоростей секций
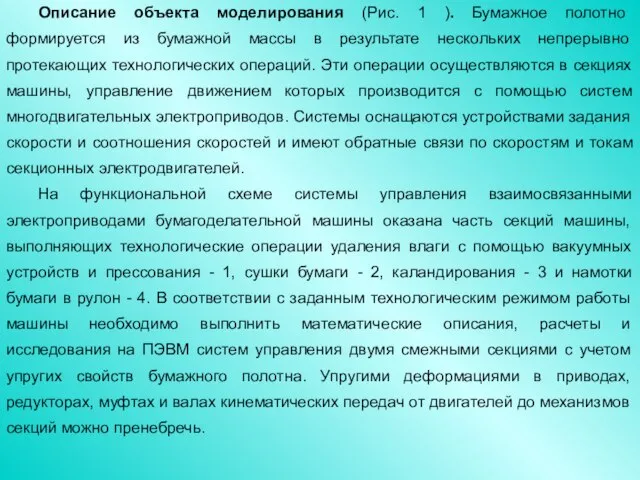
- 79. Описание объекта моделирования (Рис. 1 ). Бумажное полотно формируется из бумажной массы в результате нескольких непрерывно
- 80. Рис. 2
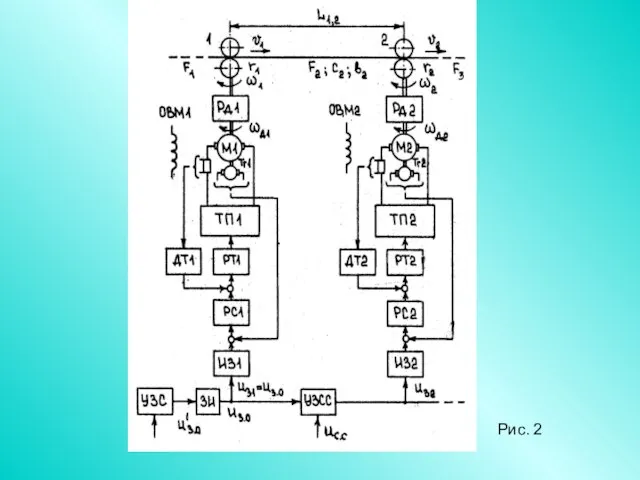
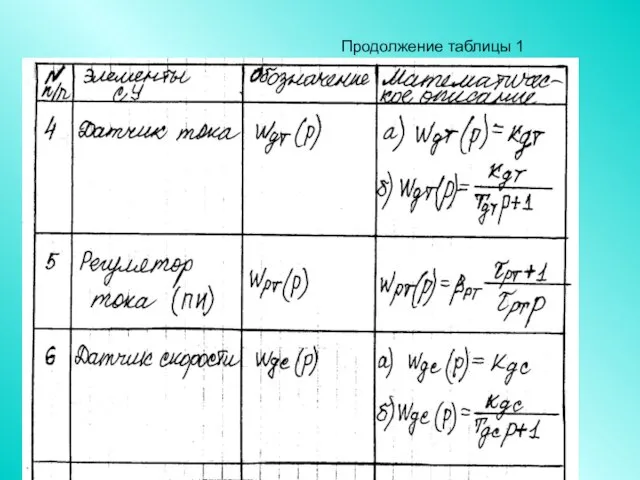
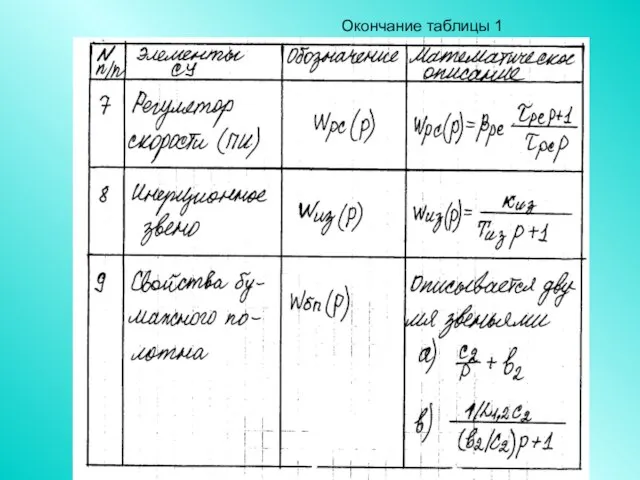
- 81. Функциональная схема системы управления двумя смежными секциями показана на рис. 2. Механизмы секций машины представлены в
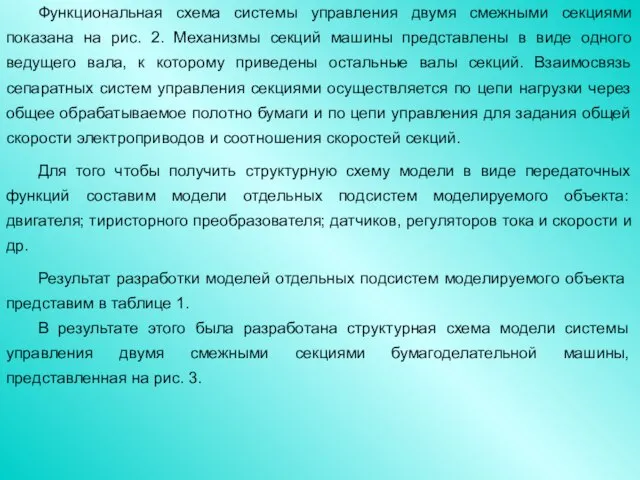
- 82. Таблица 1
- 83. Продолжение таблицы 1
- 84. Окончание таблицы 1
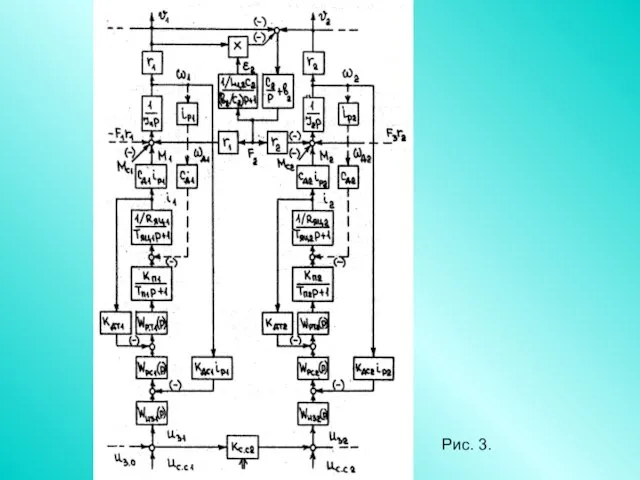
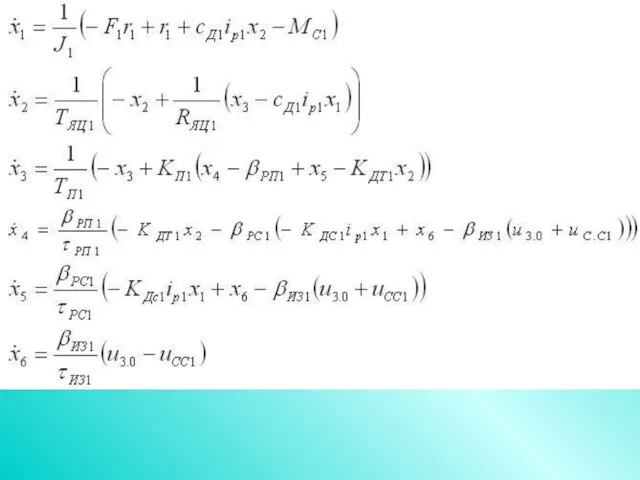
- 85. Рис. 3.
- 86. Исходными данными к выполнению работы являются данные секций и режим работы машины, состав технических средств (комплектных
- 90. Скачать презентацию
Слайд 2 В практике машинного моделирования сложных систем используется вычислительная техника трех типов: ЭВМ(электронная
В практике машинного моделирования сложных систем используется вычислительная техника трех типов: ЭВМ(электронная
Слайд 3 Рассмотрим достоинства и недостатки этих трех типов вычислительных средств (АВМ, ЭВМ и
Рассмотрим достоинства и недостатки этих трех типов вычислительных средств (АВМ, ЭВМ и
Слайд 4 5) операции сложения, вычитания, умножения, дифференцирования, интегрирования, генерирования непрерывных функций выполняются весьма
5) операции сложения, вычитания, умножения, дифференцирования, интегрирования, генерирования непрерывных функций выполняются весьма
Слайд 5 Характерные черты ЭВМ:
1) вся обработка промежуточной и результирующей информации в процессе
Характерные черты ЭВМ:
1) вся обработка промежуточной и результирующей информации в процессе
Слайд 6 6) применяется ограниченное число арифметических операций(сложение, вычитание, умножение и деление), но с
6) применяется ограниченное число арифметических операций(сложение, вычитание, умножение и деление), но с
Слайд 7 При этом цифровая часть ГВК дает возможность:
1) управлять аналоговой частью машинной
При этом цифровая часть ГВК дает возможность:
1) управлять аналоговой частью машинной
Слайд 8 Преимущества ГВК:
1) сочетает быстродействие АВМ и точность ЭВМ, что позволяет расширить
Преимущества ГВК:
1) сочетает быстродействие АВМ и точность ЭВМ, что позволяет расширить
Слайд 9 Говорить о преимуществах и недостатках ГВК можно применительно к машинному моделированию конкретного
Говорить о преимуществах и недостатках ГВК можно применительно к машинному моделированию конкретного
Слайд 10 Для сложных динамических объектов перспективным является моделирование на базе ГВК, которые реализуют
Для сложных динамических объектов перспективным является моделирование на базе ГВК, которые реализуют
Слайд 11 Состав и структура технического обеспечения АЦМК определяется множеством задач, на решение которых
Состав и структура технического обеспечения АЦМК определяется множеством задач, на решение которых
Слайд 12Рис. 4. Структура технических средств аналого-цифрового моделирующего комплекса
Рис. 4. Структура технических средств аналого-цифрового моделирующего комплекса
Слайд 13 Преобразователи АЦП и ЦАП являются средствами организации информационных связей между АВМ и
Преобразователи АЦП и ЦАП являются средствами организации информационных связей между АВМ и
Слайд 14 Оператор управляет процессом моделирования с помощью средств, номенклатура которых определяется задачами, решаемыми
Оператор управляет процессом моделирования с помощью средств, номенклатура которых определяется задачами, решаемыми
Слайд 15 Аналого-ориентированные комплексы используются в тех случаях, когда не требуется высокая точность результатов
Аналого-ориентированные комплексы используются в тех случаях, когда не требуется высокая точность результатов
Слайд 16 К цифро-ориентированным комплексам можно отнести универсальные ЭВМ, где для отображения и регистрации
К цифро-ориентированным комплексам можно отнести универсальные ЭВМ, где для отображения и регистрации
Слайд 17 Сбалансированные (универсальные) комплексы являются самым мощным средством для решения задач аналого-цифрового моделирования.
Сбалансированные (универсальные) комплексы являются самым мощным средством для решения задач аналого-цифрового моделирования.
Слайд 18 Задача построения технического обеспечения АЦМК в настоящее время сводится к выбору стандартной
Задача построения технического обеспечения АЦМК в настоящее время сводится к выбору стандартной
Слайд 19 Современные АВМ, как правило, позволяют осуществлять цифровое управление. Принципиальных трудностей в построении
Современные АВМ, как правило, позволяют осуществлять цифровое управление. Принципиальных трудностей в построении
Слайд 20 Следует ответить на вопросы: требуется ли работа в реальном масштабе времени, какие
Следует ответить на вопросы: требуется ли работа в реальном масштабе времени, какие
Слайд 21 Прежде всего нужно обосновать преимущества гибридного моделирования системы перед аналоговым или цифровым.
Прежде всего нужно обосновать преимущества гибридного моделирования системы перед аналоговым или цифровым.
Слайд 22 Сложность перечисленных вопросов заключается в том, что большинство из них взаимосвязаны. От
Сложность перечисленных вопросов заключается в том, что большинство из них взаимосвязаны. От
Слайд 23 Логическая компоновка подразумевает выбор минимального состава устройств, агрегатов и модулей из номенклатуры
Логическая компоновка подразумевает выбор минимального состава устройств, агрегатов и модулей из номенклатуры
Слайд 24 Опишем вариант построения АЦМК для решения задачи моделирования системы S на базе
Опишем вариант построения АЦМК для решения задачи моделирования системы S на базе
Слайд 25 Рассмотрим особенности компоновки устройств организации информационных и управляющих связей между ЭВМ и
Рассмотрим особенности компоновки устройств организации информационных и управляющих связей между ЭВМ и
Слайд 26 Пример 1. Рассмотрим возможности построения технического обеспечения АЦМК на базе ИВК (рис.
Пример 1. Рассмотрим возможности построения технического обеспечения АЦМК на базе ИВК (рис.
Слайд 27Рис. 5. Структура технического обеспечения АЦМК на базе ИВК
Рис. 5. Структура технического обеспечения АЦМК на базе ИВК
Слайд 28 Развитая операционная система современных ЭВМ позволяет реализовать на их основе процедуры генерации
Развитая операционная система современных ЭВМ позволяет реализовать на их основе процедуры генерации
Слайд 29 Программное обеспечение (ПО) АЦМК (рис. 6) строится по модульному принципу и включает
Программное обеспечение (ПО) АЦМК (рис. 6) строится по модульному принципу и включает
Слайд 30Рис. 6. Распределение задач моделирования по средствам АЦМК
Рис. 6. Распределение задач моделирования по средствам АЦМК

Слайд 31Пример 2. Рассмотрим состав ПО АЦМК. В зависимости от вида модели конкретной
Пример 2. Рассмотрим состав ПО АЦМК. В зависимости от вида модели конкретной
Слайд 32 Решая задачу моделирования конкретной системы S, пользователь может отказаться от использования тех
Решая задачу моделирования конкретной системы S, пользователь может отказаться от использования тех
Слайд 33 Наиболее сложная часть ПО - комплекс программных средств ЭВМ. Не останавливаясь на
Наиболее сложная часть ПО - комплекс программных средств ЭВМ. Не останавливаясь на
Слайд 34 Использование модульной структуры и организации ПО моделирования позволяет в режиме генерации создавать
Использование модульной структуры и организации ПО моделирования позволяет в режиме генерации создавать
Слайд 35Тема
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
НА МИКРОУРОВНЕ
Тема
КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
НА МИКРОУРОВНЕ
Слайд 36Объекты компьютерного моделирования на микроуровне
Объекты компьютерного моделирования на микроуровне
Слайд 37 Микроуровень – это нижний иерархический уровень декомпозиции объектов проектирования по степени абстрагирования
Микроуровень – это нижний иерархический уровень декомпозиции объектов проектирования по степени абстрагирования
Слайд 38 Общий вид уравнений математической модели описания физических свойств технического объекта с распределенными
Общий вид уравнений математической модели описания физических свойств технического объекта с распределенными
Слайд 39 Если уравнение содержит одну фазовую переменную, система описывается одним уравнением вида (1),
Если уравнение содержит одну фазовую переменную, система описывается одним уравнением вида (1),
Слайд 40 Уравнение (1) имеет множество решений. Для получения единственного решения необходимо задать краевые
Уравнение (1) имеет множество решений. Для получения единственного решения необходимо задать краевые
Слайд 41 Существует несколько стандартных способов задания граничных условий. Для теплового объекта, представляющего собой
Существует несколько стандартных способов задания граничных условий. Для теплового объекта, представляющего собой
Слайд 42 Объекты с распределенными параметрами могут быть различной физической природы: электрические, механические, тепловые,
Объекты с распределенными параметрами могут быть различной физической природы: электрические, механические, тепловые,
Слайд 43 При анализе гидравлических и пневматических систем определяют режимы течения сплошных потоков жидкостей
При анализе гидравлических и пневматических систем определяют режимы течения сплошных потоков жидкостей
Слайд 44Основы построения компьютерных моделей
элементов систем на микроуровне
Основы построения компьютерных моделей
элементов систем на микроуровне
Слайд 45 Для построения компьютерных моделей технических объектов с распределенными параметрами используют фундаментальные физические
Для построения компьютерных моделей технических объектов с распределенными параметрами используют фундаментальные физические
Слайд 46У трехмерного технического объекта вектор состоит из трех составляющих, направленных параллельно осям
У трехмерного технического объекта вектор состоит из трех составляющих, направленных параллельно осям
Слайд 47Уравнение закона сохранения массы
, (4)
где ρ – плотность массы, кг/м3;
(5)
– вектор
Уравнение закона сохранения массы
, (4)
где ρ – плотность массы, кг/м3;
(5)
– вектор
Слайд 48 Уравнение закона сохранения энергии
(7)
где – полная энергия единицы массы (е –
Уравнение закона сохранения энергии
(7)
где – полная энергия единицы массы (е –
Слайд 49 Уравнение закона сохранения количества движения используют при моделировании движения потока жидкости. Для
Уравнение закона сохранения количества движения используют при моделировании движения потока жидкости. Для
Слайд 50Для одномерного потока жидкости получаем
. (10)
При учете массовых сил и сил трения
Для одномерного потока жидкости получаем
. (10)
При учете массовых сил и сил трения
Слайд 51Модели механических подсистем на микроуровне
Модели механических подсистем на микроуровне
Слайд 52 Надежность работы ПрМ определяется рациональным выбором геометрических параметров входящих в их состав
Надежность работы ПрМ определяется рациональным выбором геометрических параметров входящих в их состав
Слайд 53 Современные методы анализа напряженно-деформированного состояния несущих элементов различных технических систем базируются на
Современные методы анализа напряженно-деформированного состояния несущих элементов различных технических систем базируются на
Слайд 54Рис. 7. Компоненты напряжений на гранях элементарного параллелепипеда
Рис. 7. Компоненты напряжений на гранях элементарного параллелепипеда
Слайд 55 Выделим в твердом теле элементарный параллелепипед (рис. 7). Сформулируем условия его равновесия:
Выделим в твердом теле элементарный параллелепипед (рис. 7). Сформулируем условия его равновесия:
Слайд 56 В случае линейной зависимости между ними, устанавливаемой законом Гука, для анизотропного тела
В случае линейной зависимости между ними, устанавливаемой законом Гука, для анизотропного тела
Слайд 57Заменив напряжения на деформации в уравнениях равновесия (12), получим уравнение теории упругости,
Заменив напряжения на деформации в уравнениях равновесия (12), получим уравнение теории упругости,
Слайд 58Поэтому модель представляют в виде выражения потенциальной энергии Еп системы как разность
Поэтому модель представляют в виде выражения потенциальной энергии Еп системы как разность
Слайд 59Используя матрицу (19), уравнения (13) и (14) можно записать в лаконичной форме
Используя матрицу (19), уравнения (13) и (14) можно записать в лаконичной форме
Слайд 60Модели тепловых систем на микроуровне
Модели тепловых систем на микроуровне
Слайд 61 Теплообмен может осуществляться теплопроводностью, конвекцией и тепловым излучением. Температурным полем называется совокупность
Теплообмен может осуществляться теплопроводностью, конвекцией и тепловым излучением. Температурным полем называется совокупность
Слайд 62 Уравнение теплопроводности может быть получено на основе закона сохранения энергии. Применительно к
Уравнение теплопроводности может быть получено на основе закона сохранения энергии. Применительно к
Слайд 63 Выделение (или поглощение) тепловой энергии внутри тела может происходить из-за объемных химических
Выделение (или поглощение) тепловой энергии внутри тела может происходить из-за объемных химических
Слайд 64 С учетом выражений (39) и (40) уравнение (38) приводится к виду
. (41)
Для
С учетом выражений (39) и (40) уравнение (38) приводится к виду
. (41)
Для
Слайд 65 Для одномерного случая, когда теплопередача осуществляется только вдоль оси х, получаем
. (44)
Для
Для одномерного случая, когда теплопередача осуществляется только вдоль оси х, получаем
. (44)
Для
Слайд 66 Для многих теплотехнических объектов можно принимать GQ = 0. К ним, в
Для многих теплотехнических объектов можно принимать GQ = 0. К ним, в
Слайд 67 При описании граничных условий в зависимости от наличия информации о теплообмене на
При описании граничных условий в зависимости от наличия информации о теплообмене на
Слайд 68 Учитывая формулу (40), можно отметить, что граничные условия второго рода характеризуют распределение
Учитывая формулу (40), можно отметить, что граничные условия второго рода характеризуют распределение
Слайд 69 Граничные условия третьего рода позволяют конкретизировать характеристики теплообмена с внешней средой. При
Граничные условия третьего рода позволяют конкретизировать характеристики теплообмена с внешней средой. При
Слайд 70 Уравнение (50) выражает закон Ньютона. Принимая во внимание, что, согласно выражению (40),
Уравнение (50) выражает закон Ньютона. Принимая во внимание, что, согласно выражению (40),
Слайд 71 Если положить α → 0, получим частный случай граничных условий второго рода
Если положить α → 0, получим частный случай граничных условий второго рода
Слайд 72 На основе выражений (47)–(53) можно получить уравнения граничных условий для одномерного теплотехнического
На основе выражений (47)–(53) можно получить уравнения граничных условий для одномерного теплотехнического
Слайд 73 Если какая-либо из границ (правая или левая) теплоизолирована, то для этой границы.
Граничные
Если какая-либо из границ (правая или левая) теплоизолирована, то для этой границы.
Граничные
Слайд 74при теплообмене излучением
(58)
где и – температура окружающей среды, соответственно, на левой
при теплообмене излучением
(58)
где и – температура окружающей среды, соответственно, на левой
Слайд 75 При анализе температурных полей все части объекта необходимо рассматривать совместно. Для каждой
При анализе температурных полей все части объекта необходимо рассматривать совместно. Для каждой
Слайд 76 При этом задается распределение температуры по всей области определения объекта Ω в
При этом задается распределение температуры по всей области определения объекта Ω в
Слайд 77Пример разработки
модели
Пример разработки
модели
Слайд 78Моделирование систем управления секциями
бумагоделательной машины
Цель работы: исследование систем стабилизации скорости и соотношения
Моделирование систем управления секциями
бумагоделательной машины
Цель работы: исследование систем стабилизации скорости и соотношения
Слайд 79 Описание объекта моделирования (Рис. 1 ). Бумажное полотно формируется из бумажной массы
Описание объекта моделирования (Рис. 1 ). Бумажное полотно формируется из бумажной массы
Слайд 80Рис. 2
Рис. 2
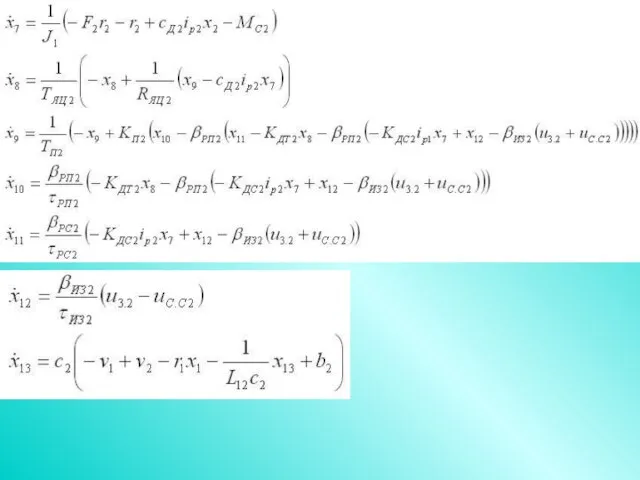
Слайд 81 Функциональная схема системы управления двумя смежными секциями показана на рис. 2. Механизмы
Функциональная схема системы управления двумя смежными секциями показана на рис. 2. Механизмы
Слайд 82Таблица 1
Таблица 1
Слайд 83Продолжение таблицы 1
Продолжение таблицы 1
Слайд 84Окончание таблицы 1
Окончание таблицы 1
Слайд 85Рис. 3.
Рис. 3.
Слайд 86 Исходными данными к выполнению работы являются данные секций и режим работы машины,
Исходными данными к выполнению работы являются данные секций и режим работы машины,

 Прием заявлений в загородные стационарные лагеря в летний период
Прием заявлений в загородные стационарные лагеря в летний период Основные понятия баз данных
Основные понятия баз данных Защита информации
Защита информации O Python. Лекция 1
O Python. Лекция 1 Технология автоматизации документооборота
Технология автоматизации документооборота Тенденции развития программного обеспечения
Тенденции развития программного обеспечения Дистанционное обучение
Дистанционное обучение Разработка программного обеспечения ИС Контроль содержания городских территорий
Разработка программного обеспечения ИС Контроль содержания городских территорий Регулярное ведение блога
Регулярное ведение блога Microsoft Office. Краткая характеристика изученных программ
Microsoft Office. Краткая характеристика изученных программ Интерактивный словарь (глоссарий) терминов по разработке, внедрению и адаптации программного обеспечения
Интерактивный словарь (глоссарий) терминов по разработке, внедрению и адаптации программного обеспечения Безопасность школьников в сети интернет
Безопасность школьников в сети интернет Правила расположения рук на клавиатуре
Правила расположения рук на клавиатуре Лекция 13. Адаптеры итераторов
Лекция 13. Адаптеры итераторов 04P_Hello_OCL_Windows
04P_Hello_OCL_Windows Мастер-класс Формирование навыков информационной компетентности школьников – условие становления духовной личности
Мастер-класс Формирование навыков информационной компетентности школьников – условие становления духовной личности Программирование на языке С
Программирование на языке С 5 Текст, ссылки и изображения
5 Текст, ссылки и изображения Аналитика результатов рекламной кампании. Подготовка отчетности
Аналитика результатов рекламной кампании. Подготовка отчетности Создание тематической карты в AutoCAD
Создание тематической карты в AutoCAD Описание системы
Описание системы Программа 600 баллов, или ловля голавля
Программа 600 баллов, или ловля голавля Прикладное программирование на PHP
Прикладное программирование на PHP Full-Stack Web Development with React (Онлайн, Coursera, ENG, ОК)
Full-Stack Web Development with React (Онлайн, Coursera, ENG, ОК) Системный анализ
Системный анализ Презентация о презентациях
Презентация о презентациях Списки и цикл for. Модуль 6. Учебный проект 2
Списки и цикл for. Модуль 6. Учебный проект 2 Solidworks как мощное средство проектирования, ядро интегрированного комплекса автоматизации предприятия
Solidworks как мощное средство проектирования, ядро интегрированного комплекса автоматизации предприятия