- Матем.схемы сети Петри

Содержание
- 2. 1 Особенности сетей Петри и области их применения Теория сетей Петри зародилась в 1962 году. Сети
- 3. Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория информационных систем) фирмы Applied Data
- 4. 2) Сети Петри позволяют описывать как типовые ситуации в дискретных подсистемах, так и общую динамику работы
- 5. 2 Основные определения. Способы задания сетей Петри Сеть Петри – это двудольный ориентированный мультиграф, все множество
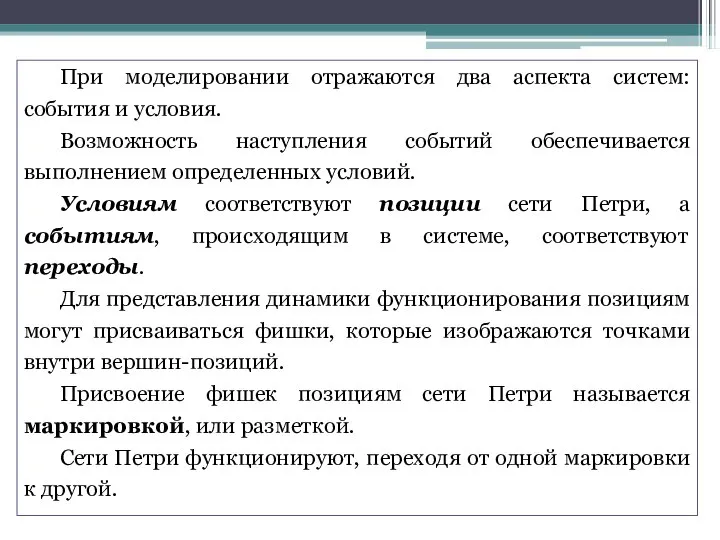
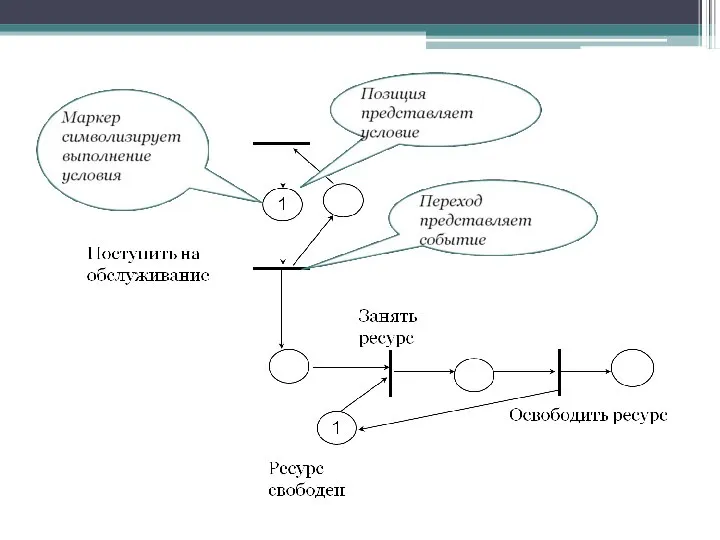
- 6. При моделировании отражаются два аспекта систем: события и условия. Возможность наступления событий обеспечивается выполнением определенных условий.
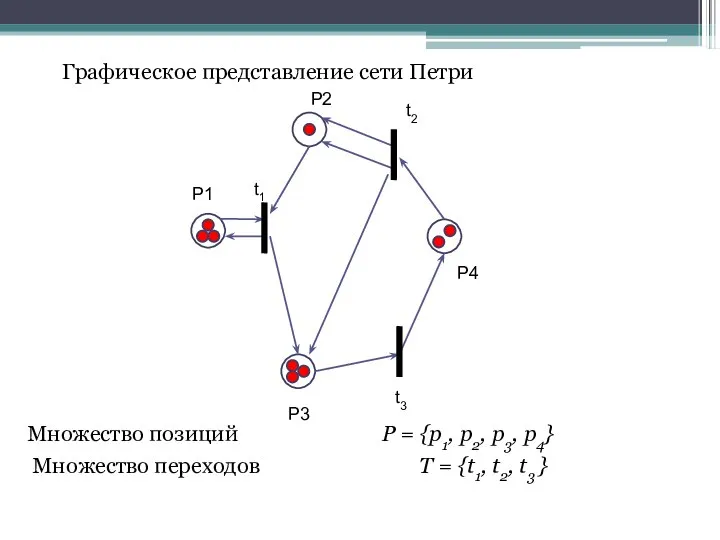
- 8. Графическое представление сети Петри Множество позиций P = {p1, p2, p3, p4} Множество переходов T =
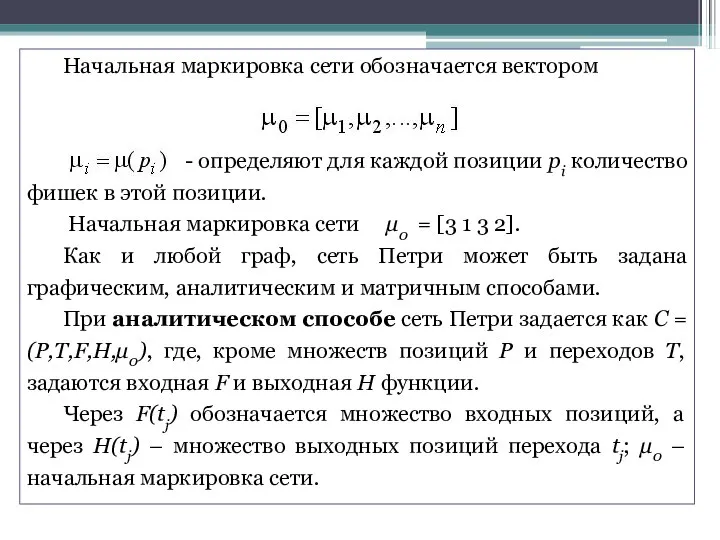
- 9. Начальная маркировка сети обозначается вектором - определяют для каждой позиции pi количество фишек в этой позиции.
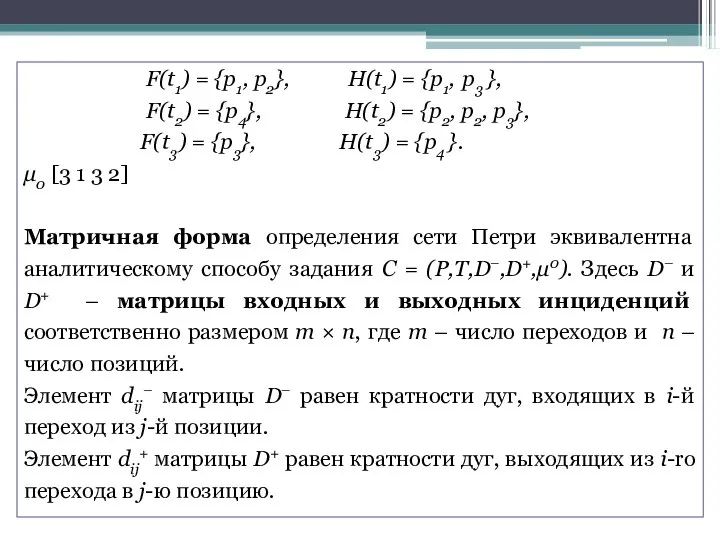
- 10. F(t1) = {p1, p2}, H(t1) = {p1, p3 }, F(t2) = {p4}, H(t2) = {p2, p2,
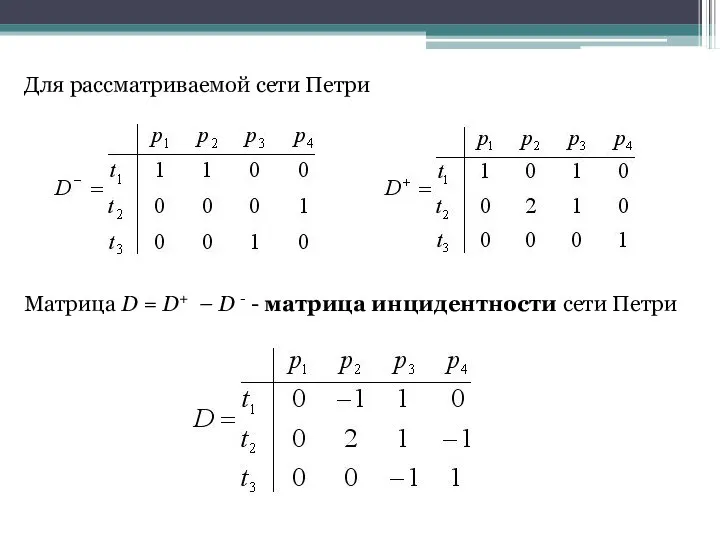
- 11. Для рассматриваемой сети Петри Матрица D = D+ – D - - матрица инцидентности сети Петри
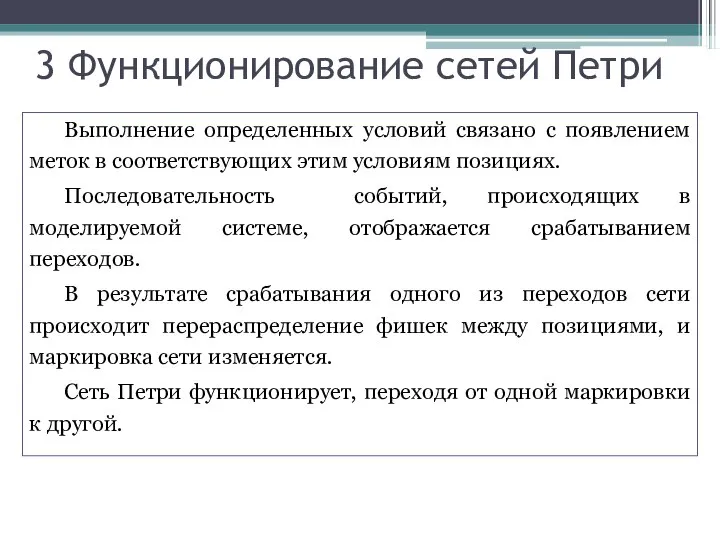
- 12. 3 Функционирование сетей Петри Выполнение определенных условий связано с появлением меток в соответствующих этим условиям позициях.
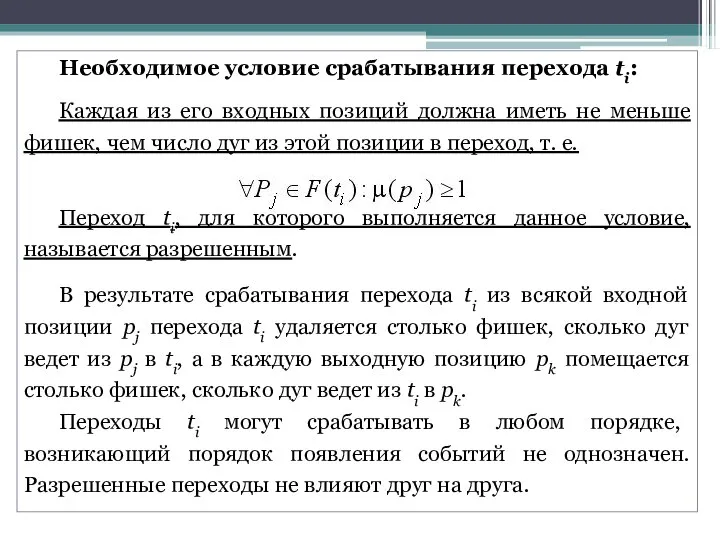
- 13. Необходимое условие срабатывания перехода ti: Каждая из его входных позиций должна иметь не меньше фишек, чем
- 14. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3
- 15. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3
- 16. При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными являются все переходы t1, t2,
- 17. Переход t1 [μ0] ≥ [100]* D– = [100] · [3 1 3 2] ≥ [1100] –
- 18. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
- 19. Переход t2 [μ0] ≥ [010]* D– = [010] · [3132] ≥ [0001] – условие выполняется, переход
- 20. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
- 21. Переход t3 [μ0] ≥ [001]* D– = [001] · [3132] ≥ [0010] – условие выполняется, переход
- 22. P1 P2 P3 P4 t1 t2 t3 P1 P2 P3 P4 t1 t2 t3 Начальная маркировка
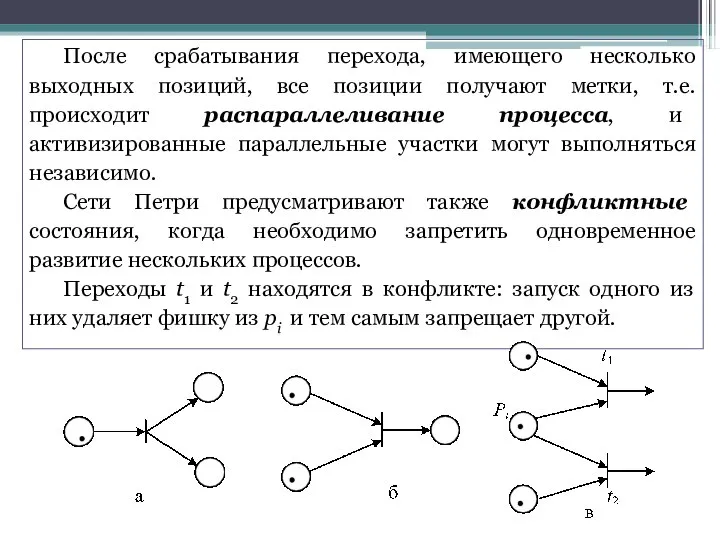
- 23. После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки, т.e. происходит распараллеливание процесса, и
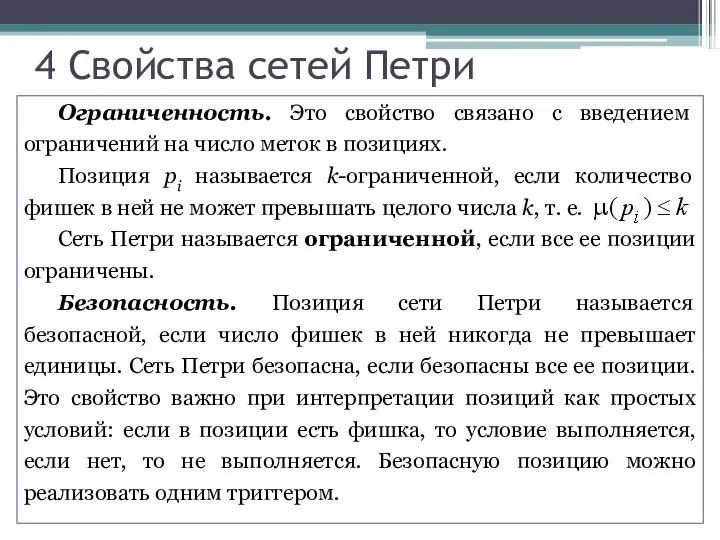
- 24. Ограниченность. Это свойство связано с введением ограничений на число меток в позициях. Позиция pi называется k-ограниченной,
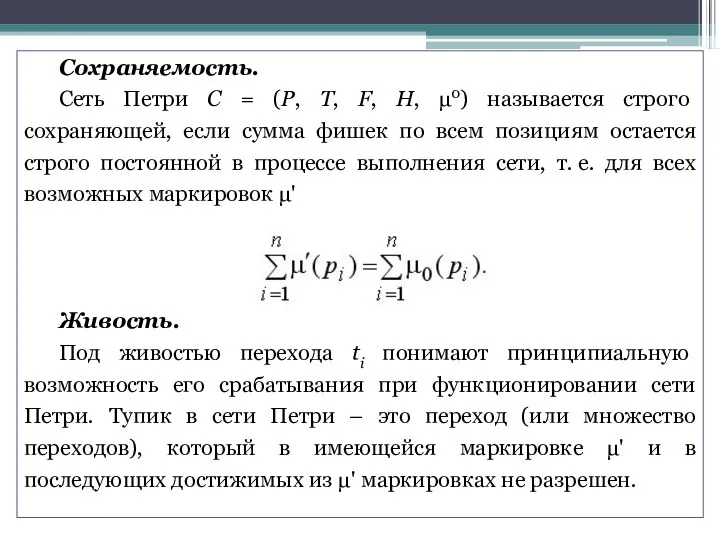
- 25. Сохраняемость. Сеть Петри С = (P, T, F, H, μ0) называется строго сохраняющей, если сумма фишек
- 26. Достижимость. Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в системе. Пусть проверяемая ситуация описывается
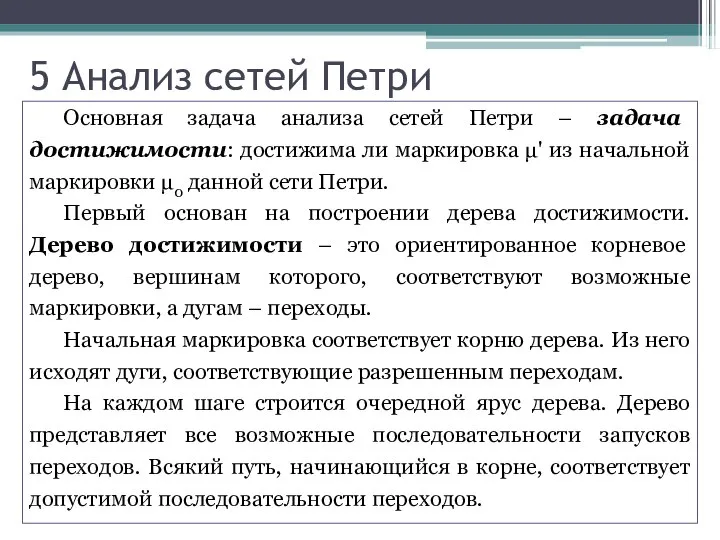
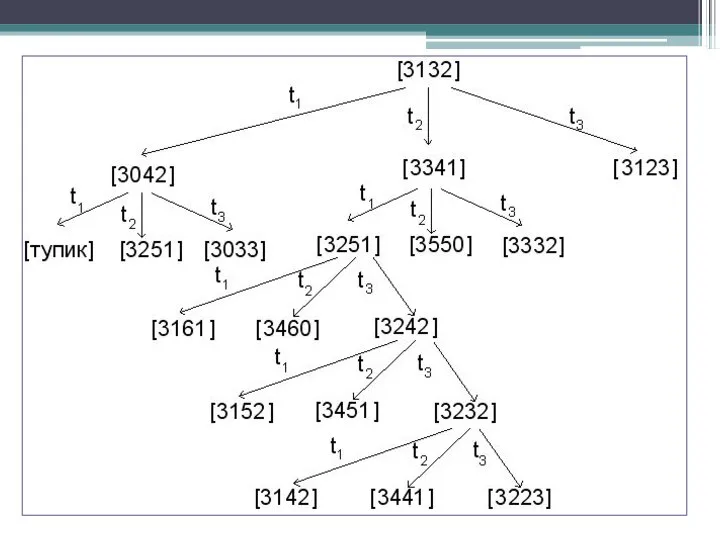
- 27. 5 Анализ сетей Петри Основная задача анализа сетей Петри – задача достижимости: достижима ли маркировка μ'
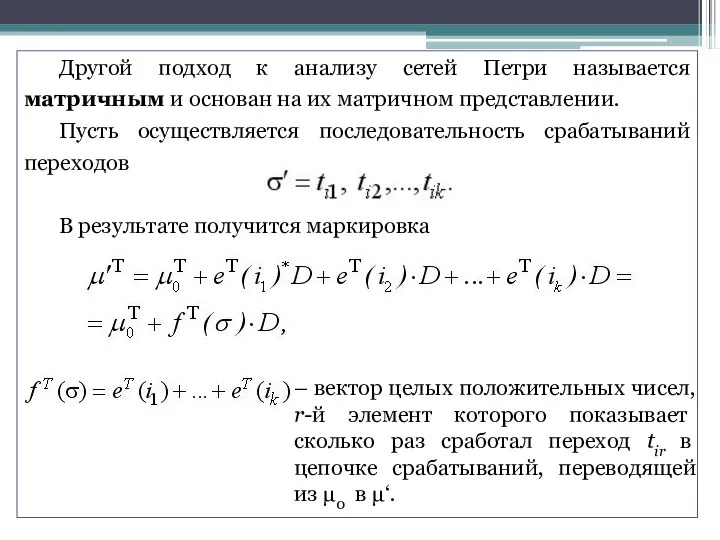
- 29. Другой подход к анализу сетей Петри называется матричным и основан на их матричном представлении. Пусть осуществляется
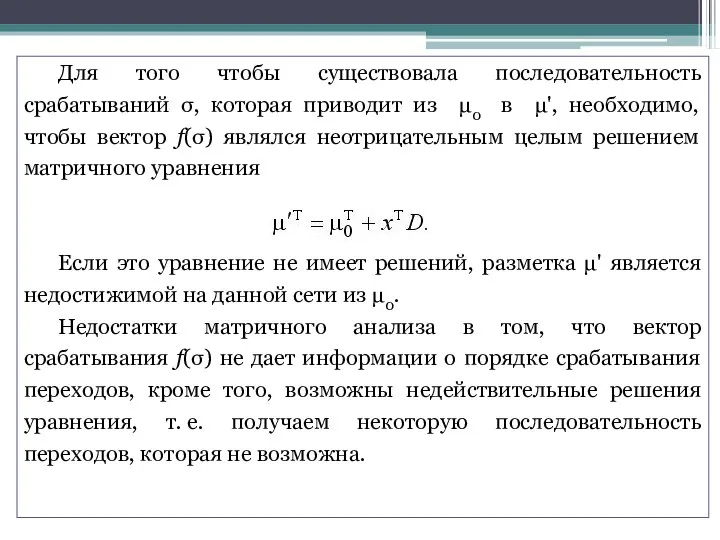
- 30. Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0 в μ', необходимо, чтобы вектор
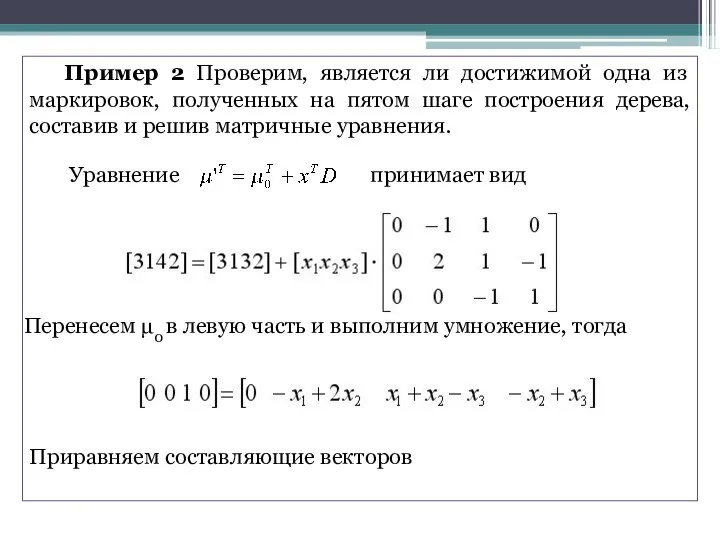
- 31. Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на пятом шаге построения дерева, составив
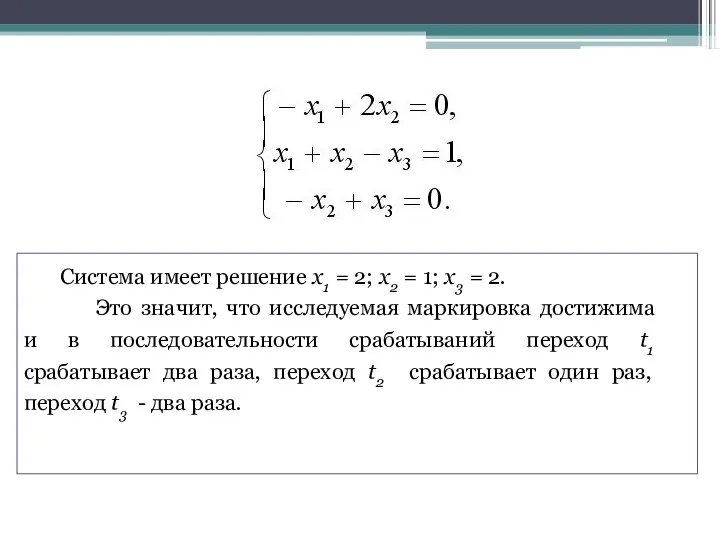
- 32. Система имеет решение x1 = 2; x2 = 1; x3 = 2. Это значит, что исследуемая
- 33. 6 Подклассы и расширения сетей Петри К подклассу автоматных графов относят сети Петри, в которых каждый
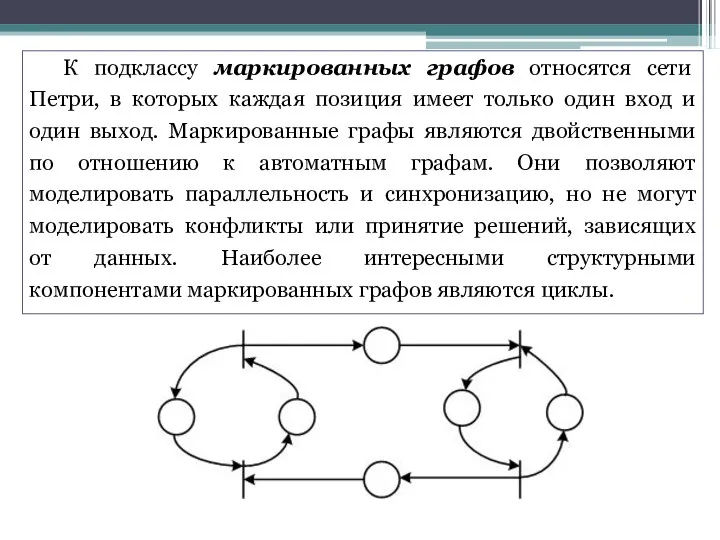
- 34. К подклассу маркированных графов относятся сети Петри, в которых каждая позиция имеет только один вход и
- 35. К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством: если при любой маркировке μ
- 37. Скачать презентацию
Слайд 3Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория информационных
Работа Петри привлекла внимание сотрудников из проекта Information System Theory (Теория информационных
Слайд 42) Сети Петри позволяют описывать как типовые ситуации в дискретных подсистемах, так
Слайд 5
2 Основные определения. Способы задания сетей Петри
Сеть Петри – это двудольный ориентированный
2 Основные определения. Способы задания сетей Петри
Сеть Петри – это двудольный ориентированный
Слайд 6При моделировании отражаются два аспекта систем: события и условия.
Возможность наступления событий
При моделировании отражаются два аспекта систем: события и условия.
Возможность наступления событий
Слайд 8Графическое представление сети Петри
Множество позиций P = {p1, p2, p3, p4}
Множество
Графическое представление сети Петри
Множество позиций P = {p1, p2, p3, p4}
Множество
Слайд 9Начальная маркировка сети обозначается вектором
- определяют для каждой позиции pi количество фишек
Начальная маркировка сети обозначается вектором
- определяют для каждой позиции pi количество фишек
Слайд 10 F(t1) = {p1, p2}, H(t1) = {p1, p3 },
F(t2) = {p4},
F(t1) = {p1, p2}, H(t1) = {p1, p3 },
F(t2) = {p4},
Слайд 11Для рассматриваемой сети Петри
Матрица D = D+ – D - -
Для рассматриваемой сети Петри
Матрица D = D+ – D - -
Слайд 123 Функционирование сетей Петри
Выполнение определенных условий связано с появлением меток в соответствующих
3 Функционирование сетей Петри
Выполнение определенных условий связано с появлением меток в соответствующих
Слайд 13Необходимое условие срабатывания перехода ti:
Каждая из его входных позиций должна иметь
Необходимое условие срабатывания перехода ti:
Каждая из его входных позиций должна иметь
Слайд 14P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Слайд 15P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
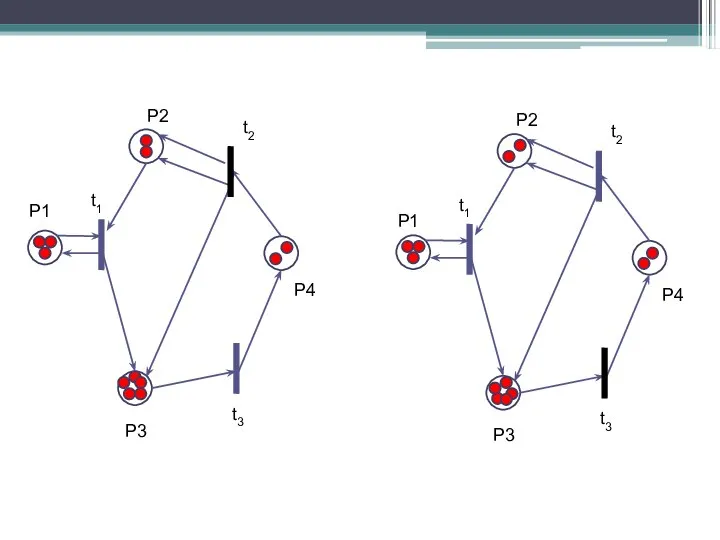
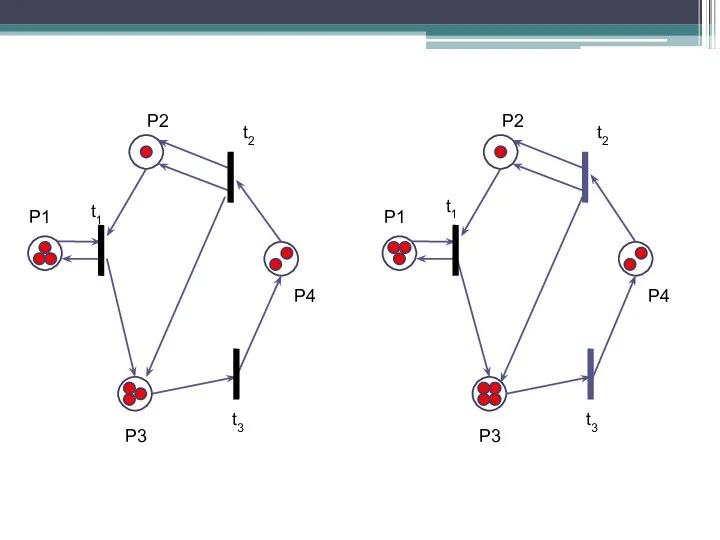
Слайд 16При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными являются
При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными являются
![При начальной маркировке μ0 =[3 1 3 2] сети Петри разрешенными являются](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1121354/slide-15.jpg)
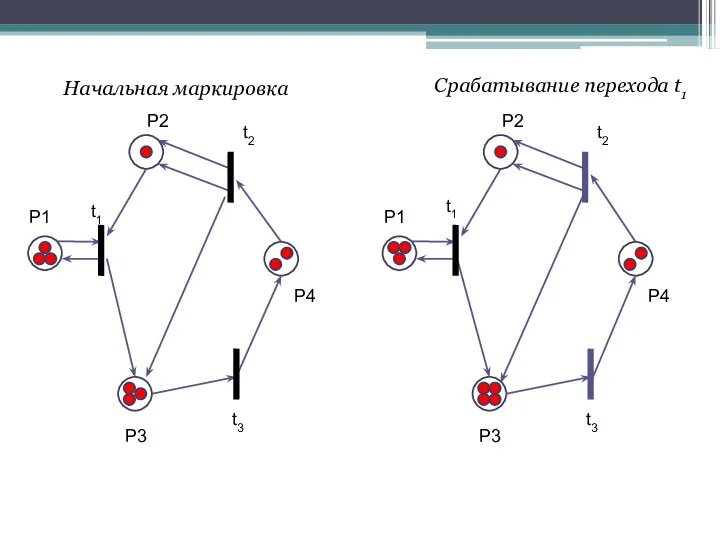
Слайд 17Переход t1
[μ0] ≥ [100]* D– = [100] ·
[3 1 3 2] ≥
Переход t1
[μ0] ≥ [100]* D– = [100] ·
[3 1 3 2] ≥
![Переход t1 [μ0] ≥ [100]* D– = [100] · [3 1 3](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1121354/slide-16.jpg)
Слайд 18P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t1
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t1
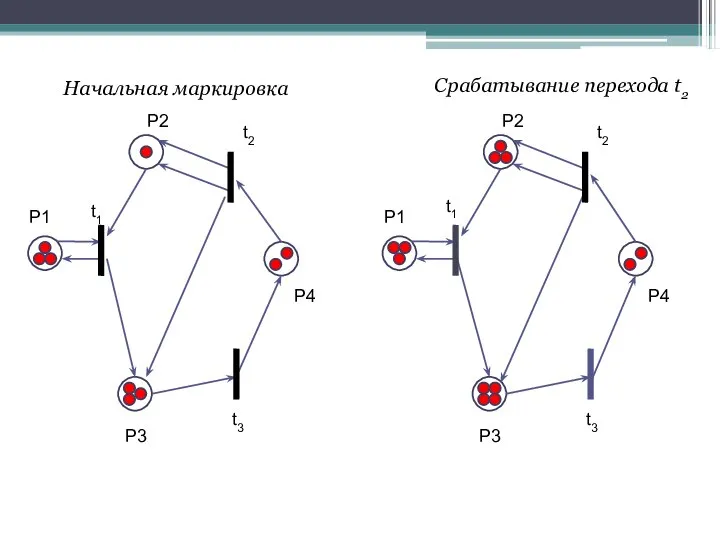
Слайд 19Переход t2
[μ0] ≥ [010]* D– = [010] ·
[3132] ≥ [0001] –
Переход t2
[μ0] ≥ [010]* D– = [010] ·
[3132] ≥ [0001] –
![Переход t2 [μ0] ≥ [010]* D– = [010] · [3132] ≥ [0001]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1121354/slide-18.jpg)
Слайд 20P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t2
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t2
Слайд 21Переход t3
[μ0] ≥ [001]* D– = [001] ·
[3132] ≥ [0010] –
Переход t3
[μ0] ≥ [001]* D– = [001] ·
[3132] ≥ [0010] –
![Переход t3 [μ0] ≥ [001]* D– = [001] · [3132] ≥ [0010]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/1121354/slide-20.jpg)
Слайд 22P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t3
P1
P2
P3
P4
t1
t2
t3
P1
P2
P3
P4
t1
t2
t3
Начальная маркировка
Срабатывание перехода t3
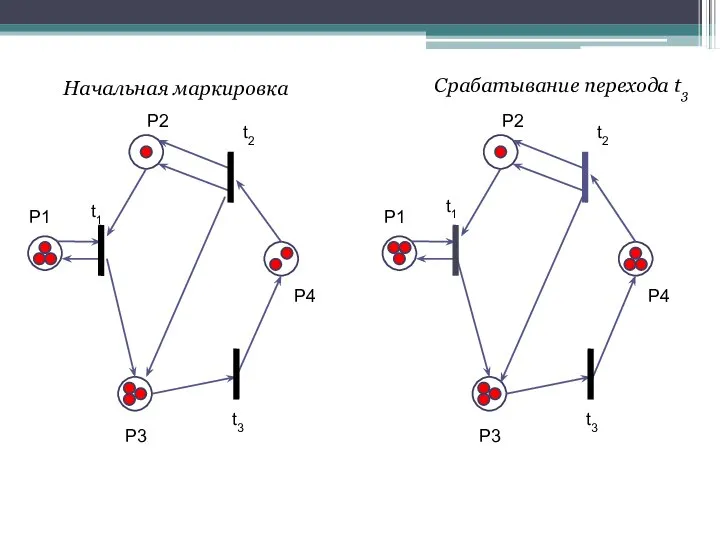
Слайд 23После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки, т.e.
После срабатывания перехода, имеющего несколько выходных позиций, все позиции получают метки, т.e.
Слайд 24Ограниченность. Это свойство связано с введением ограничений на число меток в позициях.
Позиция
Ограниченность. Это свойство связано с введением ограничений на число меток в позициях.
Позиция
Слайд 25Сохраняемость.
Сеть Петри С = (P, T, F, H, μ0) называется строго
Сохраняемость.
Сеть Петри С = (P, T, F, H, μ0) называется строго
Слайд 26Достижимость.
Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в системе.
Достижимость.
Свойство достижимости используется при установлении возможности возникновения некоторой ситуации в системе.
Слайд 275 Анализ сетей Петри
Основная задача анализа сетей Петри – задача достижимости: достижима
5 Анализ сетей Петри
Основная задача анализа сетей Петри – задача достижимости: достижима
Слайд 29Другой подход к анализу сетей Петри называется матричным и основан на их
Другой подход к анализу сетей Петри называется матричным и основан на их
Слайд 30Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0 в
Для того чтобы существовала последовательность срабатываний σ, которая приводит из μ0 в
Слайд 31Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на пятом
Пример 2 Проверим, является ли достижимой одна из маркировок, полученных на пятом
Слайд 32Система имеет решение x1 = 2; x2 = 1; x3 = 2.
Это
Система имеет решение x1 = 2; x2 = 1; x3 = 2.
Это
Слайд 336 Подклассы и расширения сетей Петри
К подклассу автоматных графов относят сети Петри,
6 Подклассы и расширения сетей Петри
К подклассу автоматных графов относят сети Петри,
Слайд 34К подклассу маркированных графов относятся сети Петри, в которых каждая позиция имеет
К подклассу маркированных графов относятся сети Петри, в которых каждая позиция имеет
Слайд 35К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством: если
К подклассу устойчивых сетей Петри относятся сети, которые обладают следующим свойством: если
 Программное обеспечение персонального компьютера
Программное обеспечение персонального компьютера Создание и развитие систем программирования
Создание и развитие систем программирования Разработка проекта состава и содержание программно-аппаратных мер по обеспечению безопасности информации на объекте
Разработка проекта состава и содержание программно-аппаратных мер по обеспечению безопасности информации на объекте Переход от реального объекта к 3Д-анимации
Переход от реального объекта к 3Д-анимации Социальная сеть Facebook
Социальная сеть Facebook Сайт библиотеки, как инструмент в деятельности ШИБЦ для продвижения книги и чтения
Сайт библиотеки, как инструмент в деятельности ШИБЦ для продвижения книги и чтения Информационные технологии в дизайне
Информационные технологии в дизайне Меdиа школа
Меdиа школа Нейронні мережі
Нейронні мережі Содержательная линия Алгоритмизации и программирования
Содержательная линия Алгоритмизации и программирования Создание альтернативного сайта ОАО Гомельтранснефть Дружба
Создание альтернативного сайта ОАО Гомельтранснефть Дружба Использование интерактивных систем на курсах повышения квалификации по ИКТ
Использование интерактивных систем на курсах повышения квалификации по ИКТ Порождающие грамматики. (Лекция 2)
Порождающие грамматики. (Лекция 2) Общие сведения о языке программирования Паскаль
Общие сведения о языке программирования Паскаль Модели жизненного цикла информационных систем
Модели жизненного цикла информационных систем Информационные процессы. Информационная система (ИС). Лекция №1
Информационные процессы. Информационная система (ИС). Лекция №1 Как свернуть информацию и запомнить текстМастер-класс
Как свернуть информацию и запомнить текстМастер-класс Презентация работы в Олимп ОКС
Презентация работы в Олимп ОКС DIDO Wi Fi (Distributed Input Distributed Output)
DIDO Wi Fi (Distributed Input Distributed Output) Видеомонтаж. Мультимедийный контейнер
Видеомонтаж. Мультимедийный контейнер Баз данных для поиска информации об участниках ВОВ в интернете
Баз данных для поиска информации об участниках ВОВ в интернете Построение линейных базовых примитивов в AutoCAD
Построение линейных базовых примитивов в AutoCAD Графический редактор
Графический редактор Программирование на языке Python. Символьные строки
Программирование на языке Python. Символьные строки История развития вычислительной техники
История развития вычислительной техники Программа Trello и MalMath
Программа Trello и MalMath ESV RabbitMq via MassTransit. Сервисная шина предприятия. Брокер сообщений
ESV RabbitMq via MassTransit. Сервисная шина предприятия. Брокер сообщений Протоколы сети Internet TCPIP, РОР3SMTP, HTTP, FTP
Протоколы сети Internet TCPIP, РОР3SMTP, HTTP, FTP