- Операционные системы для разработчиков программного обеспечения. (Лекция 2)

Содержание
- 2. План курса Введение Что такое ОС? Зачем они нужны? Основные идеи и принципы ОС Ядро ОС,
- 3. План лекции Многозадачность Понятие и виды многозадачности Потоки и процессы IPC в Windows и POSIX Средства
- 4. Перед началом… Где смотреть описание функций API ОС? для Microsoft Windows: MSDN (Microsoft Developer Network): https://docs.microsoft.com/en-us/windows/win32/
- 5. Многозадачность, типы, потоки и процессы, механизмы синхронизации: мьютекс, семафор, барьер, IPC Многозадачность
- 6. Многозадачность Одновременное выполнение нескольких подпрограмм (потоков) ОС сама переключает подпрограммы вытесняющая: ОС не ждёт завершения подпрограммы
- 7. Многозадачность Невытесняющая многозадачность (tickless-система) совместная, кооперативная многозадачность планировщик вызывается по окончанию очередной задачи (-) одна «повисшая»
- 8. Потоки и процессы Процесс – выполняется в отдельном виртуальном адресном пространстве и имеет приоритет исполнения. Поток
- 9. Создание процесса POSIX
- 10. Замещение тела процесса POSIX Новая программа загружается в память вместо старой, вызвавшей exec(). Старой программе больше
- 11. POSIX: функция system() : int system(const char *command);
- 12. POSIX: функция spawn() Функция spawn() запускает исполнимый файл и передает управление обратно вызвавшему процессу Подождать завершение
- 13. Создание процесса Windows
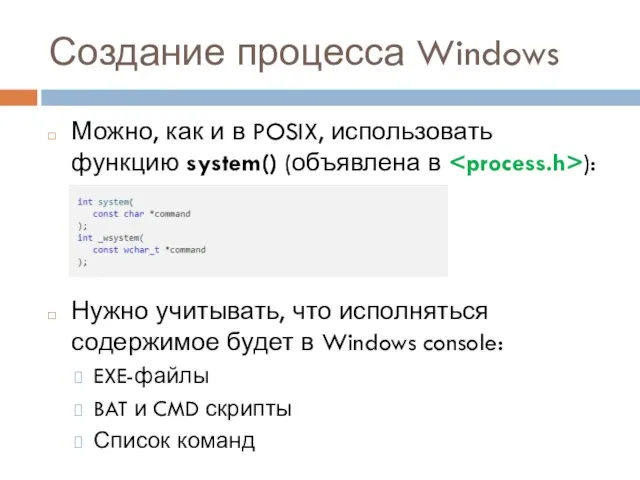
- 14. Создание процесса Windows Можно, как и в POSIX, использовать функцию system() (объявлена в ): Нужно учитывать,
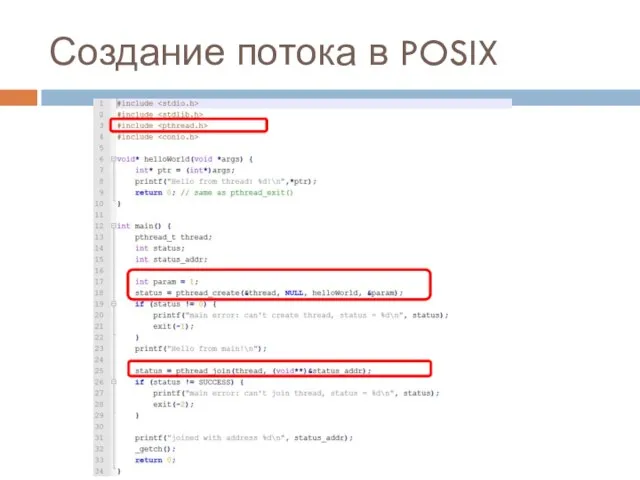
- 15. Создание потока в POSIX
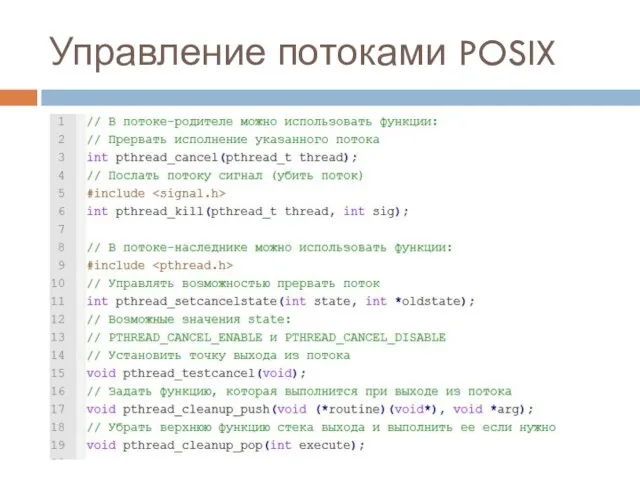
- 16. Управление потоками POSIX
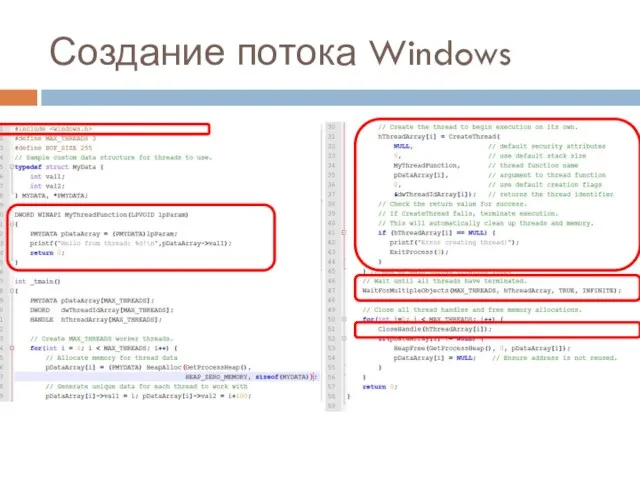
- 17. Создание потока Windows
- 18. Управление потоками Windows
- 19. IPC Межпроцессное взаимодействие (inter-process communication, IPC) — обмен данными между потоками одного или разных процессов. Реализуется
- 20. Работа с файлами
- 21. Сигналы в POSIX Сигналы могут быть посланы: ядром системы для информирования приложения об ошибках или событиях
- 22. Неименованный канал (pipe) Доступен только связанным процессам – родительскому и дочернему Использует стратегию работы с данными
- 23. Именованный канал (named pipe) В POSIX именованный канал существует независимо от использующих его процессов и имеет
- 24. Разделяемая память в POSIX Область памяти, одновременно доступная в разных процессах Самый быстрый IPC В POSIX
- 25. Разделяемая память в Windows CreateFileMapping() для создания глобально именованной области, с указанием размера OpenFileMapping() для открытия
- 26. Сокеты Беркли Сокеты впервые появились в ОС Berkeley UNIX 4.2 BSD (1983 г) Сокет в POSIX-системе
- 27. Операции с сокетами
- 28. Сторонние средства IPC/RPC DCE/RPC (Distributed Computing Environment / Remote Procedure Calls) — бинарный протокол на базе
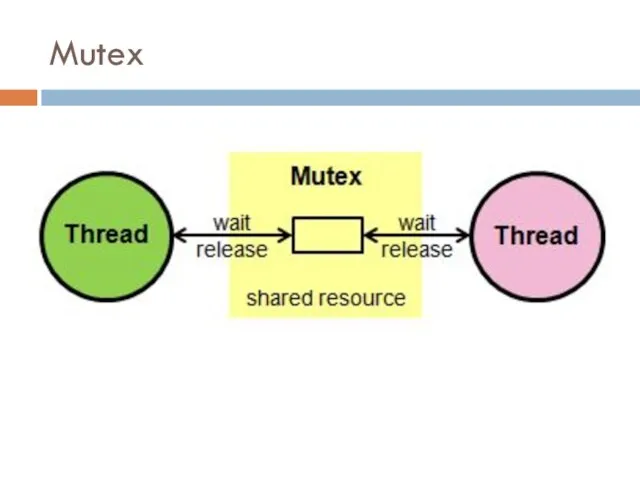
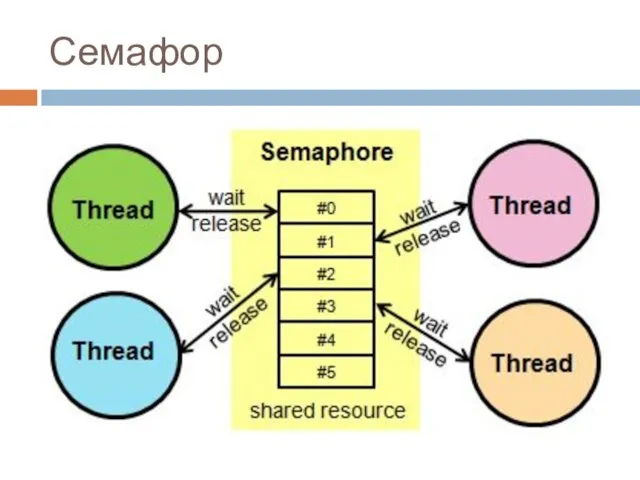
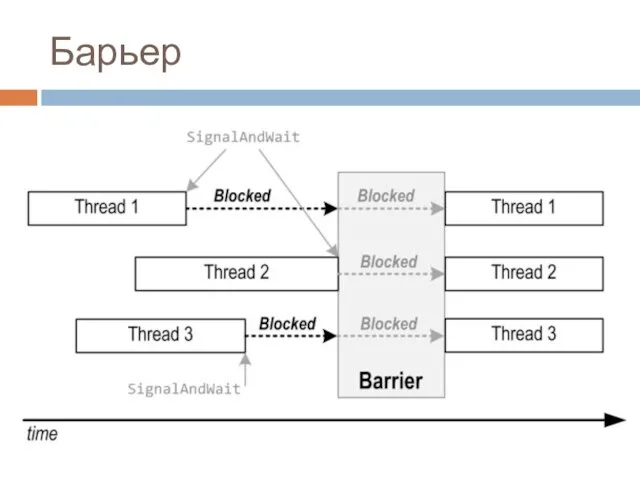
- 29. Механизмы синхронизации При работе с общей памятью из разных потоков или процессов необходимо использовать механизмы синхронизации.
- 30. Mutex
- 31. Семафор
- 32. Барьер
- 33. Синхронизация в POSIX Семафоры (#include ) – для синхронизации процессов Неименованный: int sem_init(sem_t *sem, int pshared,
- 34. Синхронизация в Windows Для синхронизации процессов используются именованные примитивы: Мьютексы: HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpMutexAttributes, BOOL bInitialOwner, LPCTSTR
- 35. Принцип устройства таймера, работа с датой и временем Таймеры
- 36. Таймеры ОС Аппаратные таймеры ограниченное число таймеров всего два программируемых события (будильника) на один таймер ограниченная
- 37. Работа со временем в ОС Аппаратно время отсчитывается RTC (realtime clock) В настольных компьютерах размещены на
- 38. Время в POSIX Ожидание (#include ): unsigned sleep(unsigned seconds); int usleep(useconds_t useconds); #include : int nanosleep(const
- 39. Время в Windows Ожидание: VOID Sleep(DWORD dwMilliseconds); DWORD SleepEx(DWORD dwMilliseconds, BOOL bAlertable); Получить время: #include :
- 40. Предопределенные макросы компиляторов, средства автоматизации сборки, функции библиотек Boost и QT для реализации IPC и работы
- 41. Макросы компиляторов Кроссплатформенный код на C/C++ обычно пишется с использованием макросов, определяющих ОС, компилятор, аппаратное обеспечение
- 42. Автоматизация сборки Система автоматизации сборки решает множество задач разработки ПО: Компиляция объектных модулей Определение ОС или
- 43. Boost и QT Boost.Threads Boost.Process Boost.Interprocess Boost.Filesystem Boost.Date_Time QThread QProcess QSharedMemory, QTcpSocket, QTcpServer,… QFile QDateTime https://www.boost.org/doc/libs/1_78_0/?view=categorized
- 44. С++11 и С++17 С++11: std::thread из std::mutex, std::recursive_mutex, std::condition_variable std::shared_ptr std::atomic С++17: std::filesystem из boost::filesystem Далее:
- 46. Скачать презентацию
Слайд 3План лекции
Многозадачность
Понятие и виды многозадачности
Потоки и процессы
IPC в Windows и POSIX
Средства IPC
Механизмы
План лекции
Многозадачность
Понятие и виды многозадачности
Потоки и процессы
IPC в Windows и POSIX
Средства IPC
Механизмы
Слайд 4Перед началом…
Где смотреть описание функций API ОС?
для Microsoft Windows:
MSDN (Microsoft Developer Network):
https://docs.microsoft.com/en-us/windows/win32/
Перед началом…
Где смотреть описание функций API ОС?
для Microsoft Windows:
MSDN (Microsoft Developer Network):
https://docs.microsoft.com/en-us/windows/win32/
Слайд 5Многозадачность, типы, потоки и процессы, механизмы синхронизации: мьютекс, семафор, барьер, IPC
Многозадачность
Многозадачность, типы, потоки и процессы, механизмы синхронизации: мьютекс, семафор, барьер, IPC
Многозадачность
Слайд 6Многозадачность
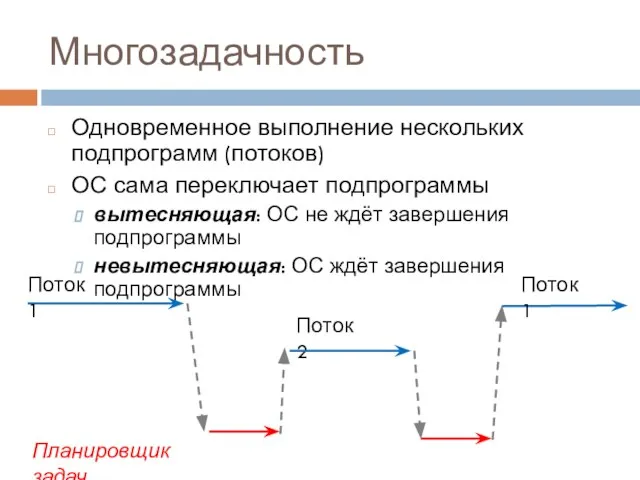
Одновременное выполнение нескольких подпрограмм (потоков)
ОС сама переключает подпрограммы
вытесняющая: ОС не ждёт завершения
Многозадачность
Одновременное выполнение нескольких подпрограмм (потоков)
ОС сама переключает подпрограммы
вытесняющая: ОС не ждёт завершения
Слайд 7Многозадачность
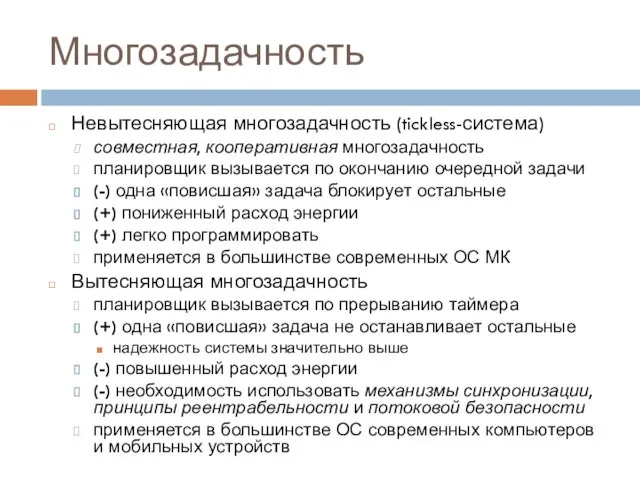
Невытесняющая многозадачность (tickless-система)
совместная, кооперативная многозадачность
планировщик вызывается по окончанию очередной задачи
(-) одна «повисшая»
Многозадачность
Невытесняющая многозадачность (tickless-система)
совместная, кооперативная многозадачность
планировщик вызывается по окончанию очередной задачи
(-) одна «повисшая»
Слайд 8Потоки и процессы
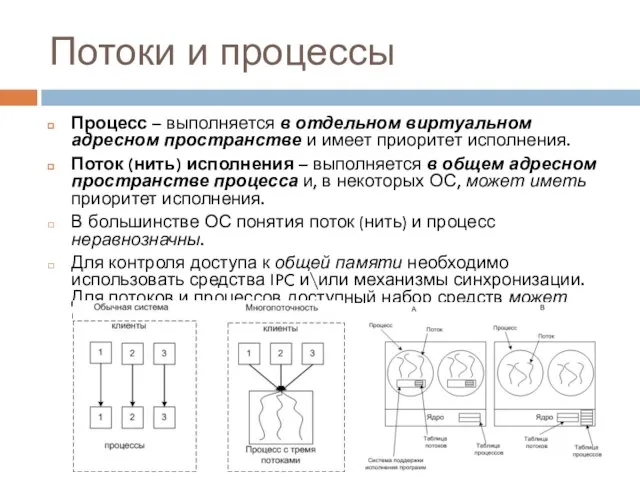
Процесс – выполняется в отдельном виртуальном адресном пространстве и имеет
Потоки и процессы
Процесс – выполняется в отдельном виртуальном адресном пространстве и имеет
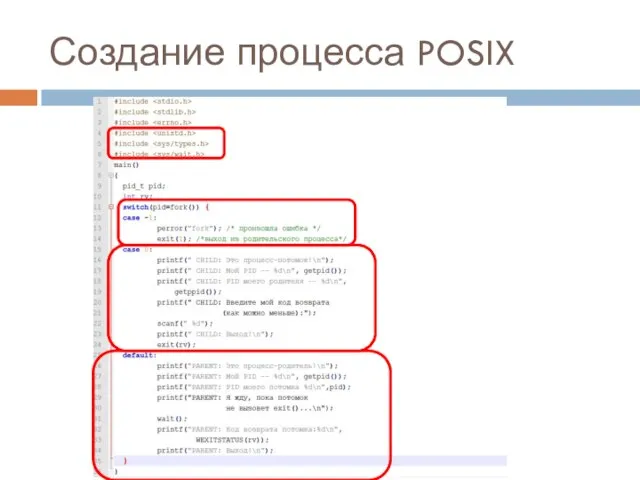
Слайд 9Создание процесса POSIX
Создание процесса POSIX
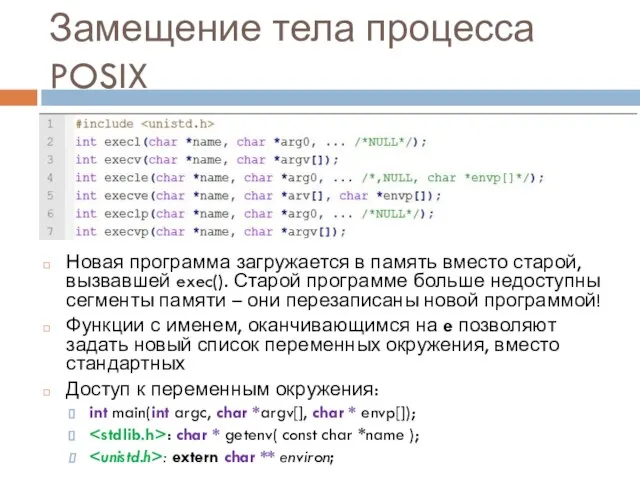
Слайд 10Замещение тела процесса POSIX
Новая программа загружается в память вместо старой, вызвавшей exec().
Замещение тела процесса POSIX
Новая программа загружается в память вместо старой, вызвавшей exec().
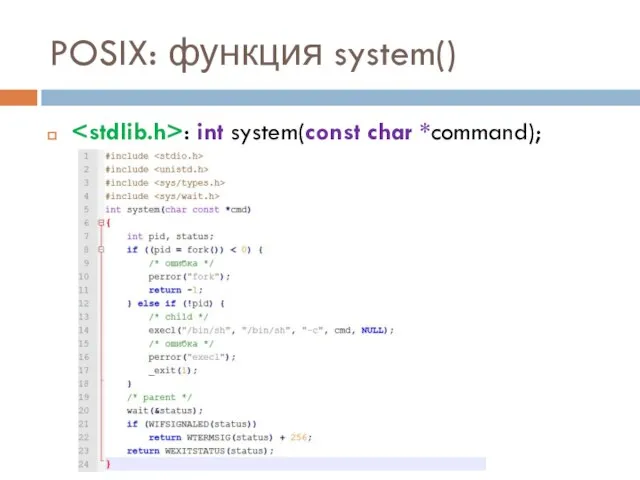
Слайд 11POSIX: функция system()
: int system(const char *command);
POSIX: функция system()
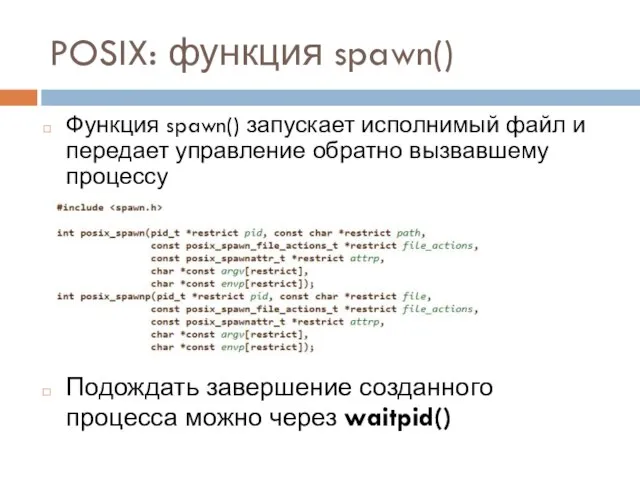
Слайд 12POSIX: функция spawn()
Функция spawn() запускает исполнимый файл и передает управление обратно вызвавшему
POSIX: функция spawn()
Функция spawn() запускает исполнимый файл и передает управление обратно вызвавшему
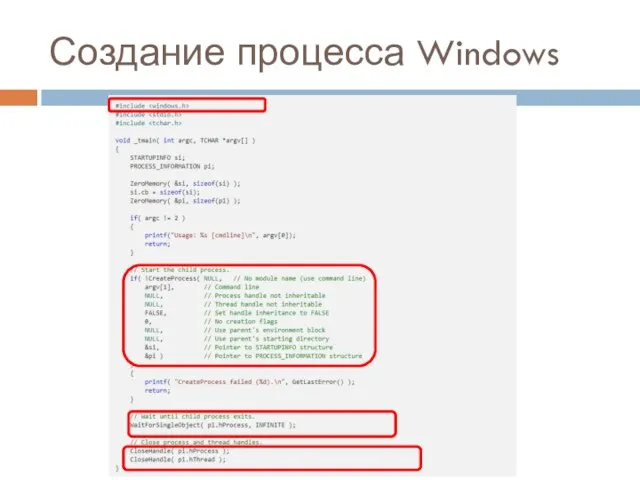
Слайд 13Создание процесса Windows
Создание процесса Windows
Слайд 14Создание процесса Windows
Можно, как и в POSIX, использовать функцию system() (объявлена в
Создание процесса Windows
Можно, как и в POSIX, использовать функцию system() (объявлена в
Слайд 15Создание потока в POSIX
Создание потока в POSIX
Слайд 16Управление потоками POSIX
Управление потоками POSIX
Слайд 17Создание потока Windows
Создание потока Windows
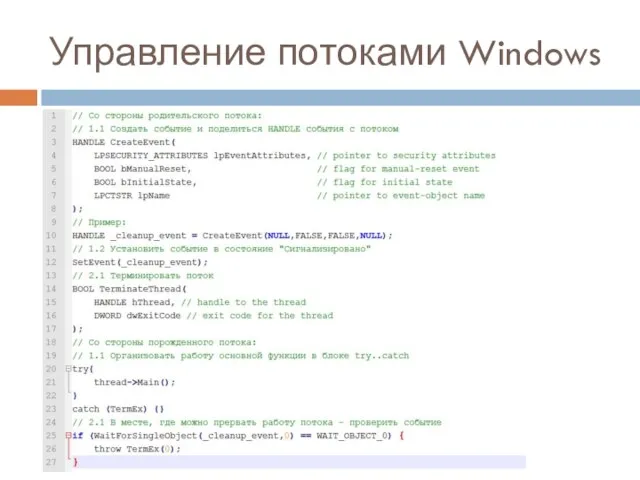
Слайд 18Управление потоками Windows
Управление потоками Windows
Слайд 19IPC
Межпроцессное взаимодействие (inter-process communication, IPC) — обмен данными между потоками одного или
IPC
Межпроцессное взаимодействие (inter-process communication, IPC) — обмен данными между потоками одного или
Слайд 20Работа с файлами
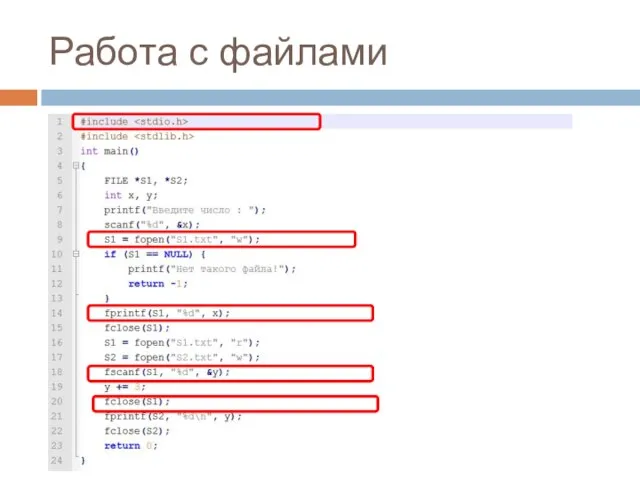
Работа с файлами
Слайд 21Сигналы в POSIX
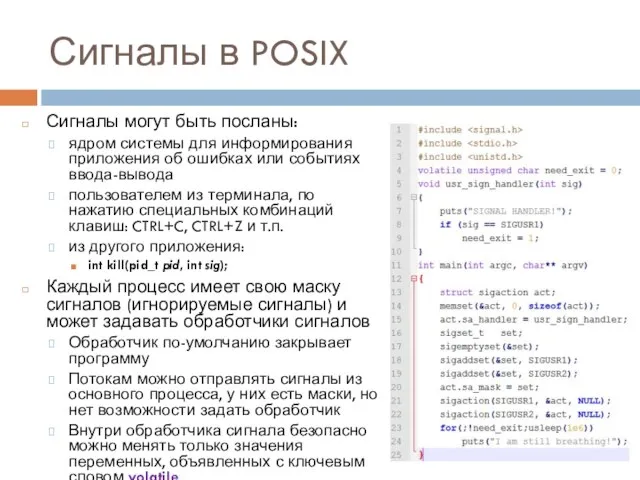
Сигналы могут быть посланы:
ядром системы для информирования приложения об ошибках
Сигналы в POSIX
Сигналы могут быть посланы:
ядром системы для информирования приложения об ошибках
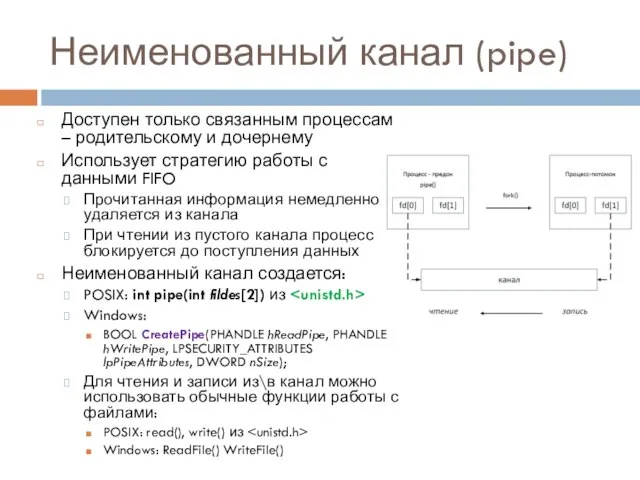
Слайд 22Неименованный канал (pipe)
Доступен только связанным процессам – родительскому и дочернему
Использует стратегию работы
Неименованный канал (pipe)
Доступен только связанным процессам – родительскому и дочернему
Использует стратегию работы
Слайд 23Именованный канал (named pipe)
В POSIX именованный канал существует независимо от использующих его
Именованный канал (named pipe)
В POSIX именованный канал существует независимо от использующих его
Слайд 24Разделяемая память в POSIX
Область памяти, одновременно доступная в разных процессах
Самый быстрый IPC
В
Разделяемая память в POSIX
Область памяти, одновременно доступная в разных процессах
Самый быстрый IPC
В
Слайд 25Разделяемая память в Windows
CreateFileMapping() для создания глобально именованной области, с указанием размера
OpenFileMapping()
Разделяемая память в Windows
CreateFileMapping() для создания глобально именованной области, с указанием размера
OpenFileMapping()
Слайд 26Сокеты Беркли
Сокеты впервые появились в ОС
Berkeley UNIX 4.2 BSD (1983 г)
Сокет
Сокеты Беркли
Сокеты впервые появились в ОС
Berkeley UNIX 4.2 BSD (1983 г)
Сокет
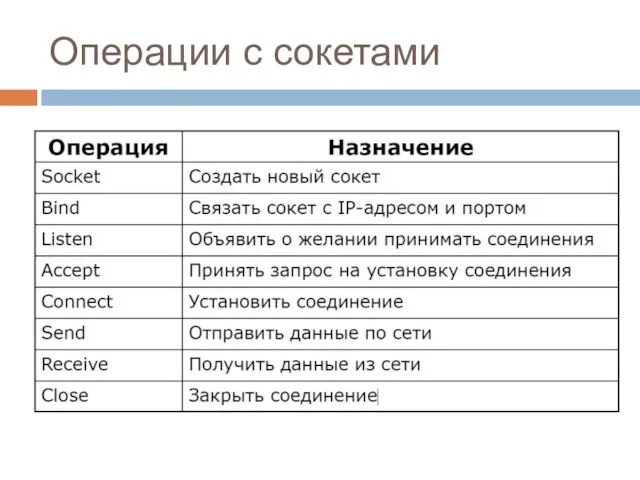
Слайд 27Операции с сокетами
Операции с сокетами
Слайд 28Сторонние средства IPC/RPC
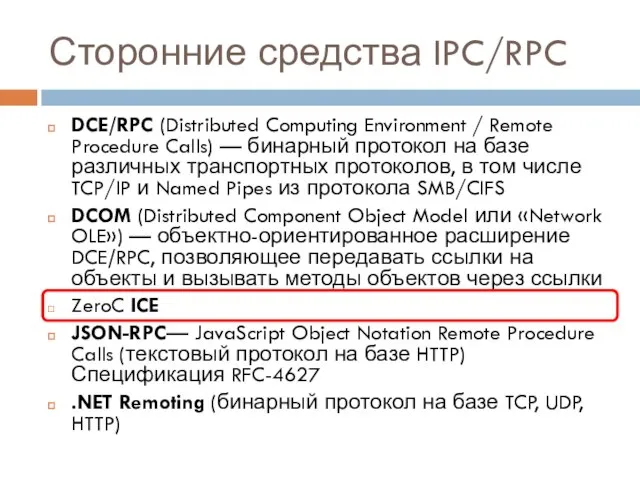
DCE/RPC (Distributed Computing Environment / Remote Procedure Calls) — бинарный
Сторонние средства IPC/RPC
DCE/RPC (Distributed Computing Environment / Remote Procedure Calls) — бинарный
Слайд 29Механизмы синхронизации
При работе с общей памятью из разных потоков или процессов необходимо
Механизмы синхронизации
При работе с общей памятью из разных потоков или процессов необходимо
Слайд 30Mutex
Mutex
Слайд 31Семафор
Семафор
Слайд 32Барьер
Барьер
Слайд 33Синхронизация в POSIX
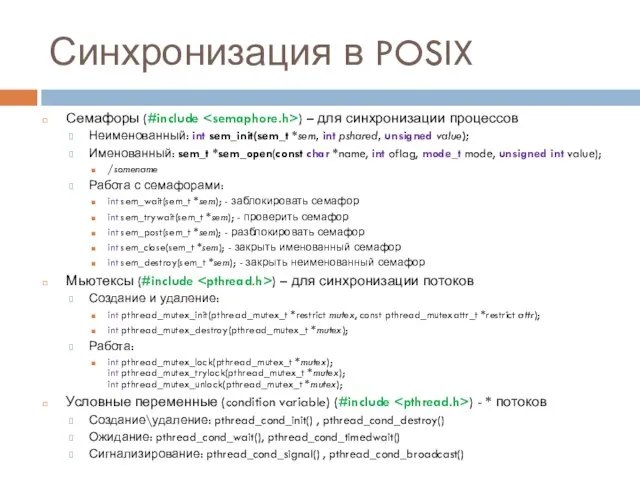
Семафоры (#include ) – для синхронизации процессов
Неименованный: int sem_init(sem_t *sem,
Синхронизация в POSIX
Семафоры (#include
Неименованный: int sem_init(sem_t *sem,
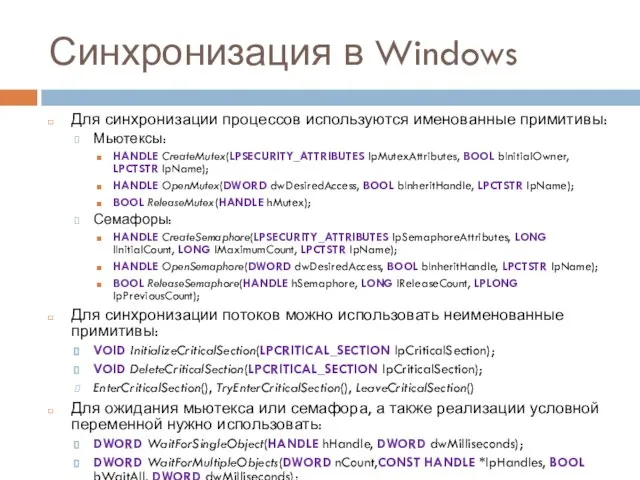
Слайд 34Синхронизация в Windows
Для синхронизации процессов используются именованные примитивы:
Мьютексы:
HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpMutexAttributes, BOOL
Синхронизация в Windows
Для синхронизации процессов используются именованные примитивы:
Мьютексы:
HANDLE CreateMutex(LPSECURITY_ATTRIBUTES lpMutexAttributes, BOOL
Слайд 35Принцип устройства таймера, работа с датой и временем
Таймеры
Принцип устройства таймера, работа с датой и временем
Таймеры
Слайд 36Таймеры ОС
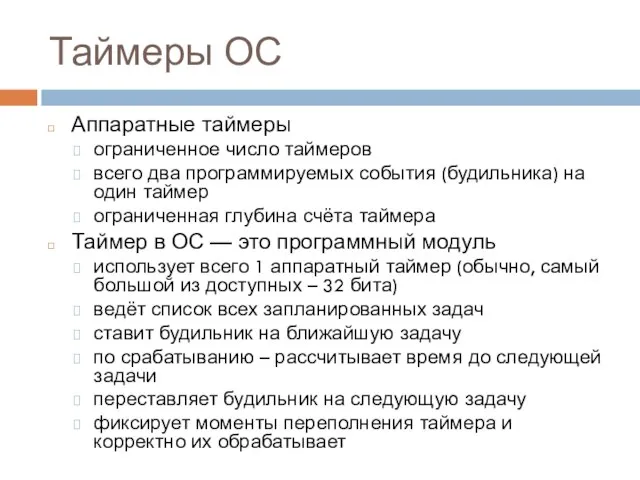
Аппаратные таймеры
ограниченное число таймеров
всего два программируемых события (будильника) на один таймер
ограниченная
Таймеры ОС
Аппаратные таймеры
ограниченное число таймеров
всего два программируемых события (будильника) на один таймер
ограниченная
Слайд 37Работа со временем в ОС
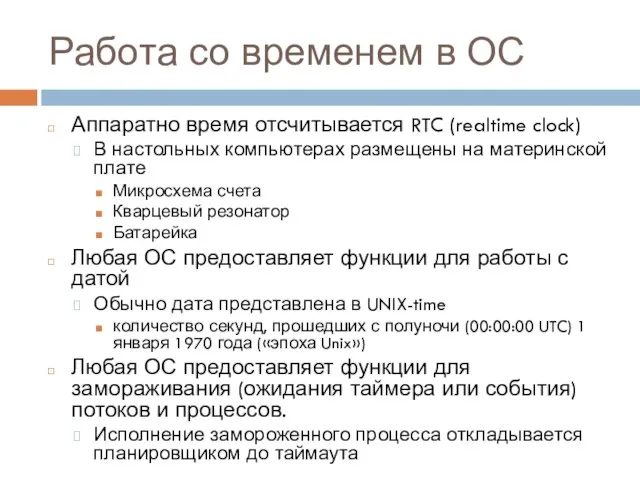
Аппаратно время отсчитывается RTC (realtime clock)
В настольных компьютерах
Работа со временем в ОС
Аппаратно время отсчитывается RTC (realtime clock)
В настольных компьютерах
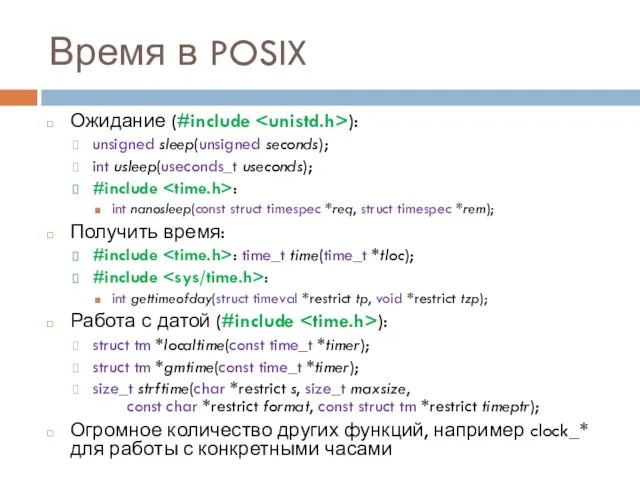
Слайд 38Время в POSIX
Ожидание (#include ):
unsigned sleep(unsigned seconds);
int usleep(useconds_t useconds);
#include :
Время в POSIX
Ожидание (#include
unsigned sleep(unsigned seconds);
int usleep(useconds_t useconds);
#include
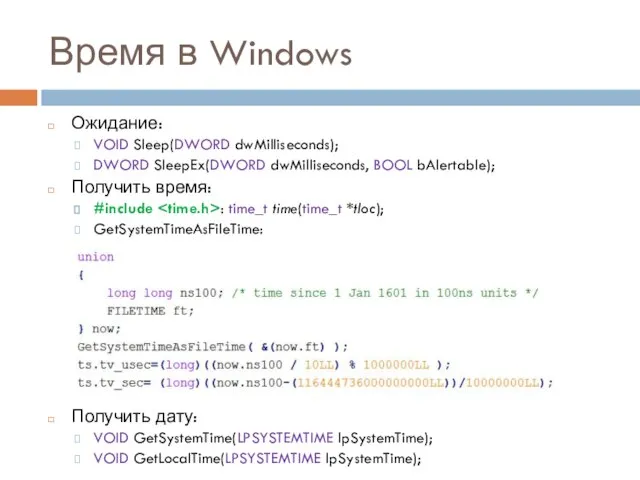
Слайд 39Время в Windows
Ожидание:
VOID Sleep(DWORD dwMilliseconds);
DWORD SleepEx(DWORD dwMilliseconds, BOOL bAlertable);
Получить время:
#include : time_t
Время в Windows
Ожидание:
VOID Sleep(DWORD dwMilliseconds);
DWORD SleepEx(DWORD dwMilliseconds, BOOL bAlertable);
Получить время:
#include
Слайд 40Предопределенные макросы компиляторов,
средства автоматизации сборки,
функции библиотек Boost и QT для реализации IPC
Предопределенные макросы компиляторов,
средства автоматизации сборки,
функции библиотек Boost и QT для реализации IPC
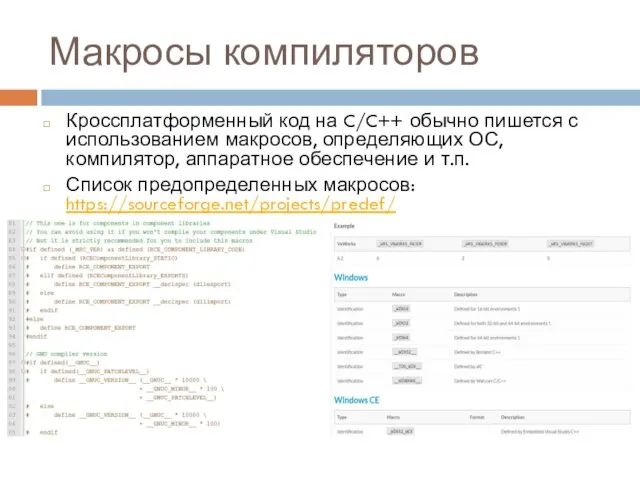
Слайд 41Макросы компиляторов
Кроссплатформенный код на C/C++ обычно пишется с использованием макросов, определяющих ОС,
Макросы компиляторов
Кроссплатформенный код на C/C++ обычно пишется с использованием макросов, определяющих ОС,
Слайд 42Автоматизация сборки
Система автоматизации сборки решает множество задач разработки ПО:
Компиляция объектных модулей
Определение ОС
Автоматизация сборки
Система автоматизации сборки решает множество задач разработки ПО:
Компиляция объектных модулей
Определение ОС
Слайд 43Boost и QT
Boost.Threads
Boost.Process
Boost.Interprocess
Boost.Filesystem
Boost.Date_Time
QThread
QProcess
QSharedMemory, QTcpSocket, QTcpServer,…
QFile
QDateTime
https://www.boost.org/doc/libs/1_78_0/?view=categorized
https://doc.qt.io/qt-5/index.html
Boost и QT
Boost.Threads
Boost.Process
Boost.Interprocess
Boost.Filesystem
Boost.Date_Time
QThread
QProcess
QSharedMemory, QTcpSocket, QTcpServer,…
QFile
QDateTime
https://www.boost.org/doc/libs/1_78_0/?view=categorized
https://doc.qt.io/qt-5/index.html
Слайд 44С++11 и С++17
С++11:
std::thread из
std::mutex, std::recursive_mutex, std::condition_variable
std::shared_ptr
std::atomic<>
С++17:
std::filesystem из boost::filesystem
Далее:
Возможно, появятся и
С++11 и С++17
С++11:
std::thread из
std::mutex, std::recursive_mutex, std::condition_variable
std::shared_ptr
std::atomic<>
С++17:
std::filesystem из boost::filesystem
Далее:
Возможно, появятся и
 Small Cells integration Интерфейсы
Small Cells integration Интерфейсы Программирование в MathCAD
Программирование в MathCAD Сети датацентров и виртуализация. Вычислительные сети и телекоммуникации
Сети датацентров и виртуализация. Вычислительные сети и телекоммуникации Вирусы и антивирусные программы
Вирусы и антивирусные программы Mega friends
Mega friends Работа с электронными таблицами
Работа с электронными таблицами Цифровая трансформация
Цифровая трансформация Рисование вазы в графическом редакторе Paint
Рисование вазы в графическом редакторе Paint Схема формирования предложения клиенту от 13 августа 2018
Схема формирования предложения клиенту от 13 августа 2018 Компас
Компас Модели представления данных
Модели представления данных История компьютерной техники
История компьютерной техники Настройка Vlan
Настройка Vlan Азбука журналистики
Азбука журналистики Ithub-1. Поиск утечек персональных данных
Ithub-1. Поиск утечек персональных данных Отчет за сентябрь @aramake.ru
Отчет за сентябрь @aramake.ru Автоматизация систем регулирования трафика на перекрестках
Автоматизация систем регулирования трафика на перекрестках Триггеры в презентации. Моя педагогическая инициатива
Триггеры в презентации. Моя педагогическая инициатива История электронной таблицы. VisiCalc и первые персональные компьютеры
История электронной таблицы. VisiCalc и первые персональные компьютеры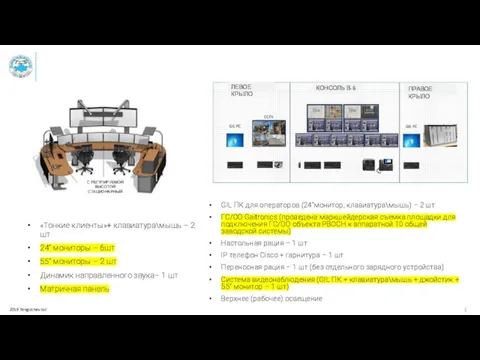 Стационарный GIL ПК для операторов (24’’монитор, клавиатура\мышь)
Стационарный GIL ПК для операторов (24’’монитор, клавиатура\мышь) Основные виды
Основные виды Компьютерные сети. Тест
Компьютерные сети. Тест Организация библиотек. Стандартные библиотечные модули и модули пользователя. Лекция 11
Организация библиотек. Стандартные библиотечные модули и модули пользователя. Лекция 11 Wikipsydia. Материалы психологического факультета
Wikipsydia. Материалы психологического факультета Российские телеканалы
Российские телеканалы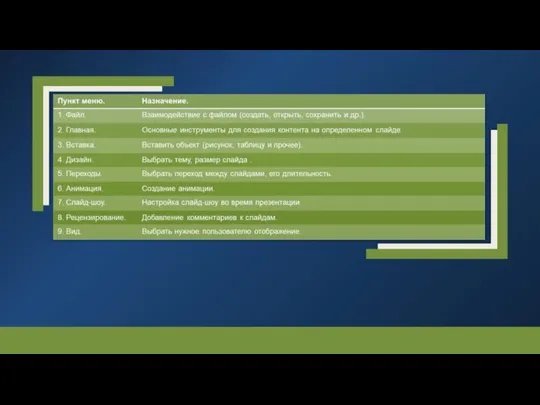 Пункт меню. Назначение
Пункт меню. Назначение Работа с диаграммами в Microsoft Word
Работа с диаграммами в Microsoft Word Путешествие в страну информации. Урок-игра
Путешествие в страну информации. Урок-игра