- Параметрическая оптимизация пид – регулятора

Содержание
- 2. Структурная оптимизация - определение оптимальной структуры автоматической системы. Параметрическая оптимизация - определение оптимальных значений параметров элементов
- 3. Основные понятия и определения Если критериев оптимальности несколько – задача называется многокритериальной. Целевая функция – функция,
- 4. Постановка задачи оптимизации Постановки задачи оптимизации включает следующие этапы: Выбор критерия (критериев) оптимальности Выбор регулируемых параметров
- 5. Построение целевой функции Построение целевой функции осуществляется с использованием методов математического моделирования. Основная проблема постановки задачи
- 6. Построение целевой функции Целевая функция должна быть одна. Сведение многокритериальной задачи к однокритериальной называют сверткой векторного
- 7. Условная и безусловная оптимизация Различают методы условной и безусловной оптимизации по наличию или отсутствию ограничений. Если
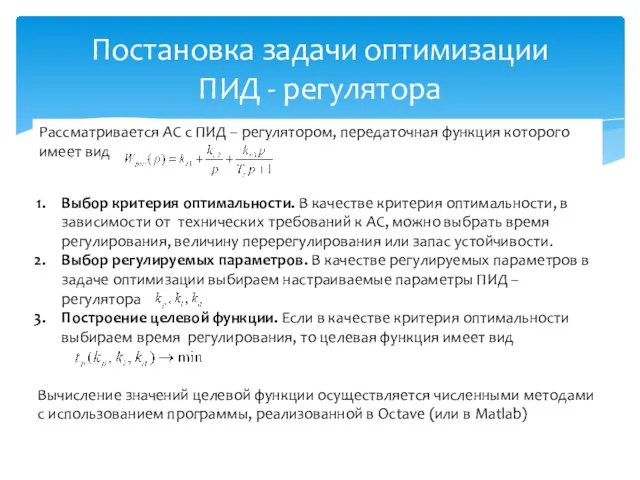
- 8. Постановка задачи оптимизации ПИД - регулятора Рассматривается АС с ПИД – регулятором, передаточная функция которого имеет
- 9. Решение задачи оптимизации ПИД – регулятора в Octave и Matlab Формально решение задачи оптимизации в данной
- 11. Скачать презентацию
Слайд 2Структурная оптимизация - определение оптимальной структуры автоматической системы.
Параметрическая оптимизация - определение оптимальных
Структурная оптимизация - определение оптимальной структуры автоматической системы.
Параметрическая оптимизация - определение оптимальных
Слайд 3Основные понятия и определения
Если критериев оптимальности несколько – задача называется многокритериальной.
Целевая функция
Основные понятия и определения
Если критериев оптимальности несколько – задача называется многокритериальной.
Целевая функция
Слайд 4Постановка задачи оптимизации
Постановки задачи оптимизации включает следующие этапы:
Выбор критерия (критериев) оптимальности
Выбор
Постановка задачи оптимизации
Постановки задачи оптимизации включает следующие этапы:
Выбор критерия (критериев) оптимальности
Выбор
Слайд 5Построение целевой функции
Построение целевой функции осуществляется с использованием методов математического моделирования.
Основная проблема
Построение целевой функции
Построение целевой функции осуществляется с использованием методов математического моделирования.
Основная проблема
Слайд 6Построение целевой функции
Целевая функция должна быть одна. Сведение многокритериальной задачи к однокритериальной
Построение целевой функции
Целевая функция должна быть одна. Сведение многокритериальной задачи к однокритериальной
Слайд 7Условная и безусловная оптимизация
Различают методы условной и безусловной оптимизации по наличию или
Условная и безусловная оптимизация
Различают методы условной и безусловной оптимизации по наличию или
Слайд 8Постановка задачи оптимизации
ПИД - регулятора
Рассматривается АС с ПИД – регулятором, передаточная
Постановка задачи оптимизации
ПИД - регулятора
Рассматривается АС с ПИД – регулятором, передаточная
Слайд 9Решение задачи оптимизации
ПИД – регулятора в Octave и Matlab
Формально решение задачи
Решение задачи оптимизации
ПИД – регулятора в Octave и Matlab
Формально решение задачи
 Оформление проекта
Оформление проекта одирование тестовой, графической и звуковой информации
одирование тестовой, графической и звуковой информации Интеллигентный интернет: безопасные практики виртуальной коммуникации
Интеллигентный интернет: безопасные практики виртуальной коммуникации Инструкция по регистрации через терминал IBOX
Инструкция по регистрации через терминал IBOX Информационные системы. Экономические информационные системы
Информационные системы. Экономические информационные системы Интернет – площадка Агрохолл
Интернет – площадка Агрохолл Дистанционное обучение в системе на портале Moodle
Дистанционное обучение в системе на портале Moodle Диаграмма деятельности
Диаграмма деятельности Построение таблиц истинности
Построение таблиц истинности Молодежь
Молодежь Основные понятия БД
Основные понятия БД Системы отображения информации пилотируемых космических аппаратов
Системы отображения информации пилотируемых космических аппаратов Интернет-сервисы ЦНСХБ
Интернет-сервисы ЦНСХБ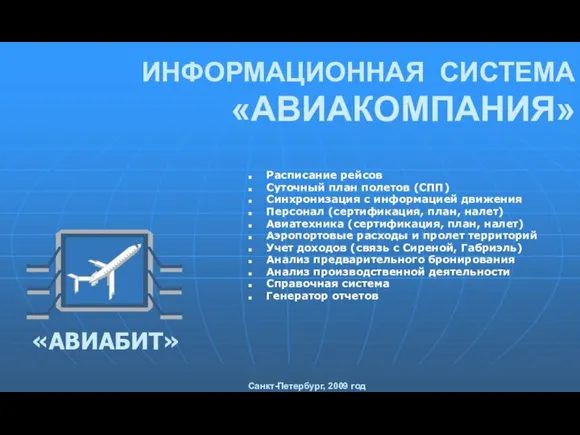 Информационная система Авиакомпания
Информационная система Авиакомпания Автоматическая система теплопотребления и погодного регулирования в ИТП многоквартирного дома
Автоматическая система теплопотребления и погодного регулирования в ИТП многоквартирного дома Правила библиографического описания документов
Правила библиографического описания документов Всемирная компьютерная сеть интернет
Всемирная компьютерная сеть интернет Язык программирования Python. Основы
Язык программирования Python. Основы Разработка Системы автоматизации газосепараторов ГС 2- 4 на КСП- 6 и определение методов монтажа средств автоматизации
Разработка Системы автоматизации газосепараторов ГС 2- 4 на КСП- 6 и определение методов монтажа средств автоматизации ВКР: Разработка агрегатора сервисных центров по ремонту электроники
ВКР: Разработка агрегатора сервисных центров по ремонту электроники Техника безопасности в компьютерном классе
Техника безопасности в компьютерном классе Иконографика. Разработка иконок для мобильных приложений
Иконографика. Разработка иконок для мобильных приложений Классификация программного обеспечения
Классификация программного обеспечения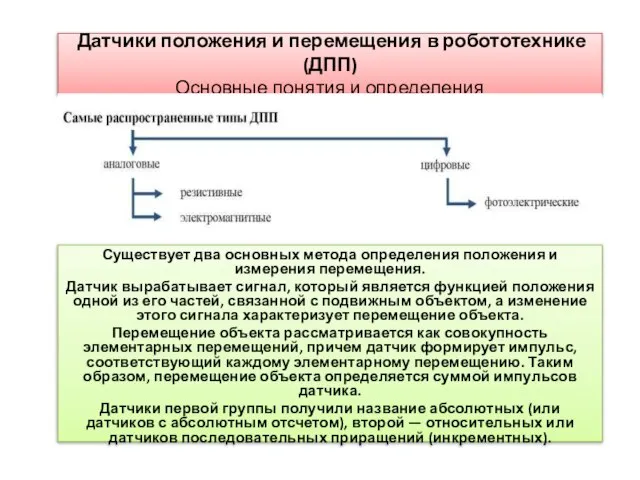 Датчики положения и перемещения в робототехнике (ДПП). Основные понятия и определения
Датчики положения и перемещения в робототехнике (ДПП). Основные понятия и определения Тест по базам данных
Тест по базам данных Adobe Photoshop
Adobe Photoshop Язык разметки гипертекста HTML
Язык разметки гипертекста HTML Обработка текстовой информации. Стили
Обработка текстовой информации. Стили