- Plane Detection in a 3D environment using a Velodyne Lidar Jacoby Larson UCSD ECE 172

Содержание
- 2. Velodyne Lidar Sensor
- 3. Velodyne Used by CMU and Stanford in DARPA Urban Challenge races
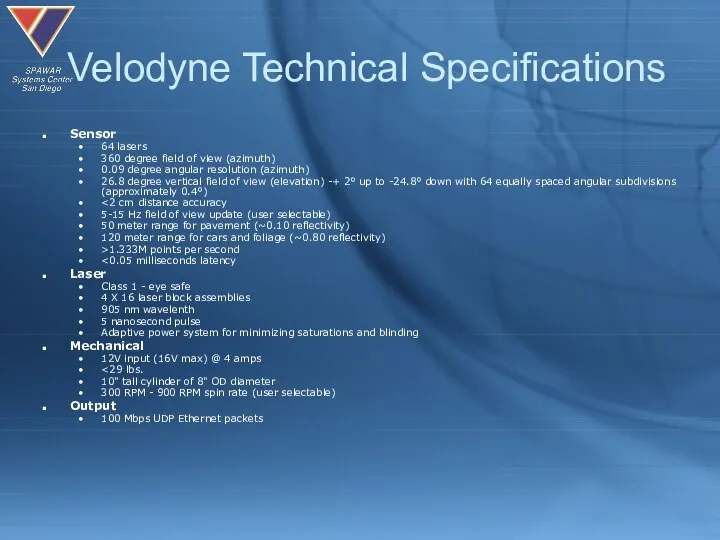
- 4. Velodyne Technical Specifications Sensor 64 lasers 360 degree field of view (azimuth) 0.09 degree angular resolution
- 5. Problem Statement & Motivation Computer vision has a tough time determining range in real time and
- 6. Related Research & Basic Approach Stamos, Allen, “Geometry and texture recovery of scenes of large scale”,
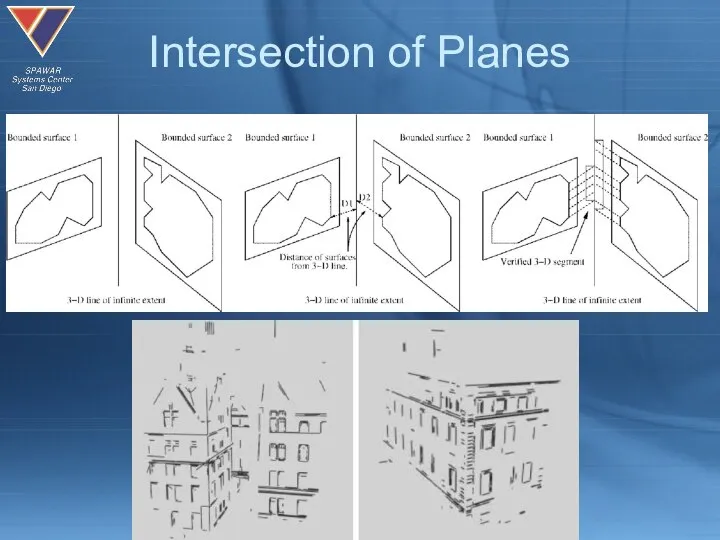
- 7. Intersection of Planes
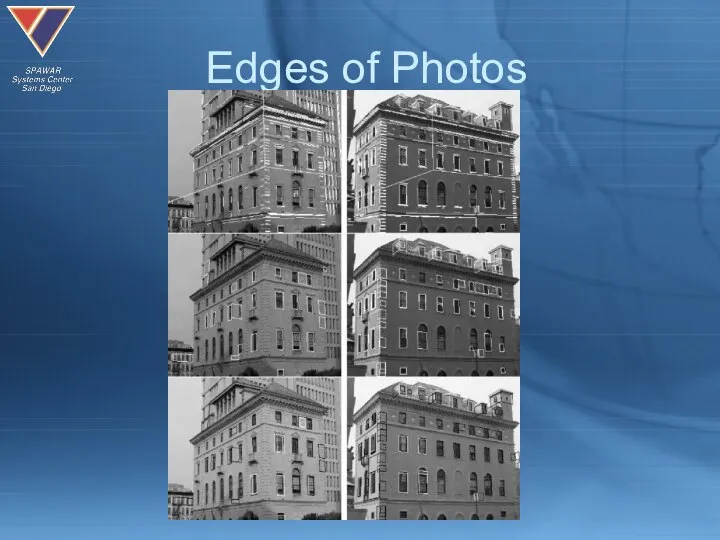
- 8. Edges of Photos
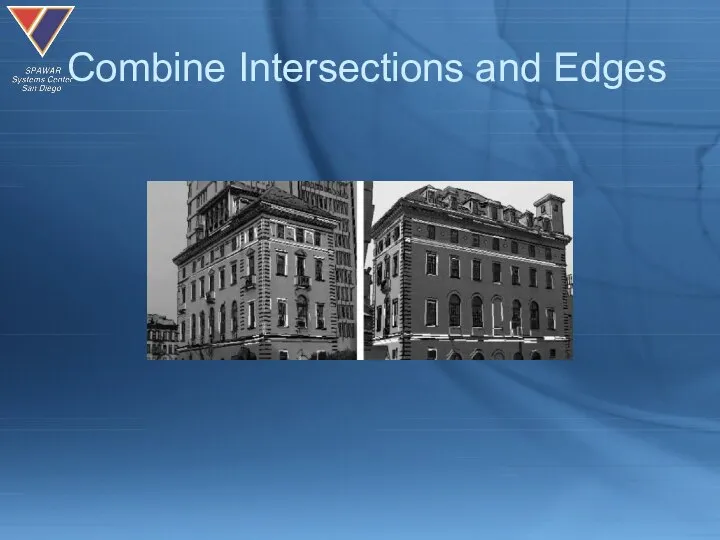
- 9. Combine Intersections and Edges
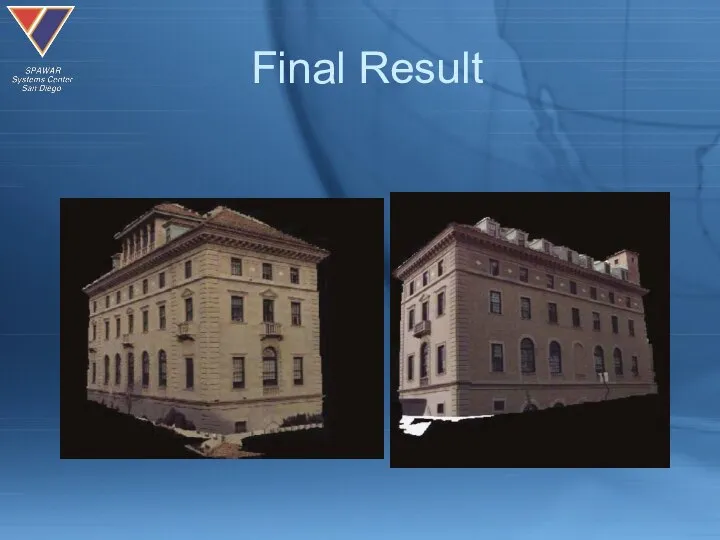
- 10. Final Result
- 11. My Approach Select points randomly from lidar (1 million/second) This should allow real-time processing whereas their
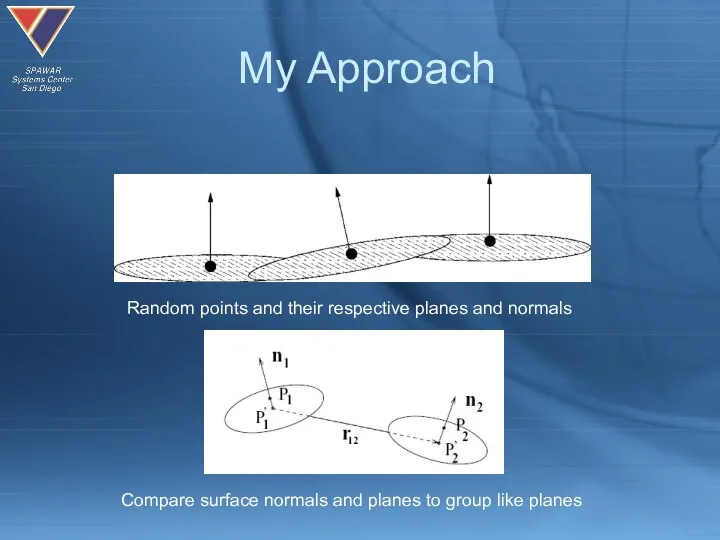
- 12. My Approach Random points and their respective planes and normals Compare surface normals and planes to
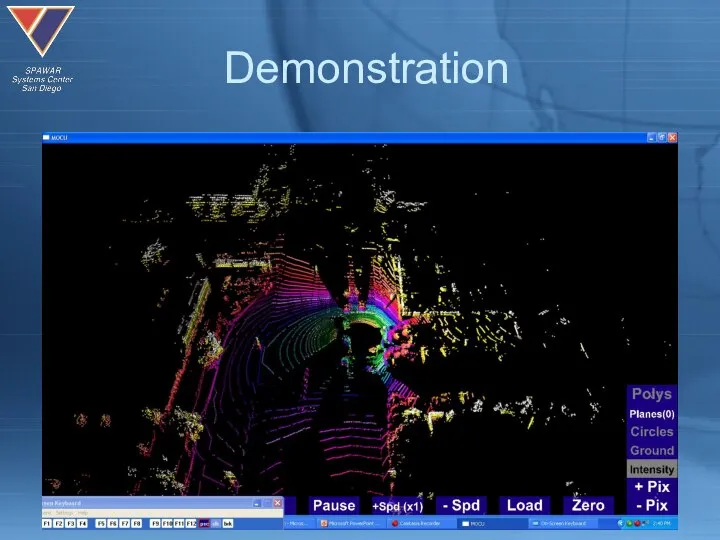
- 13. Demonstration
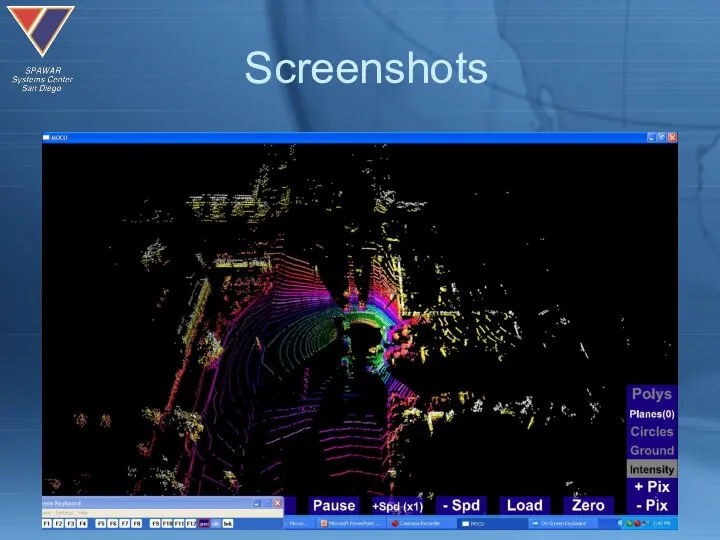
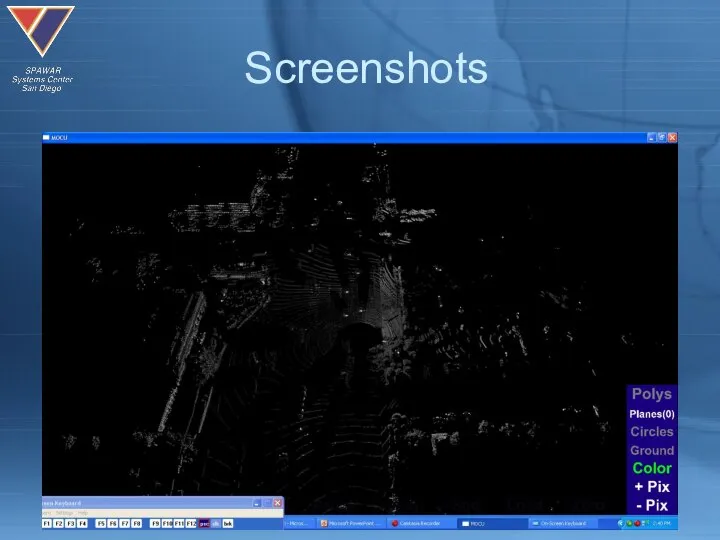
- 14. Screenshots
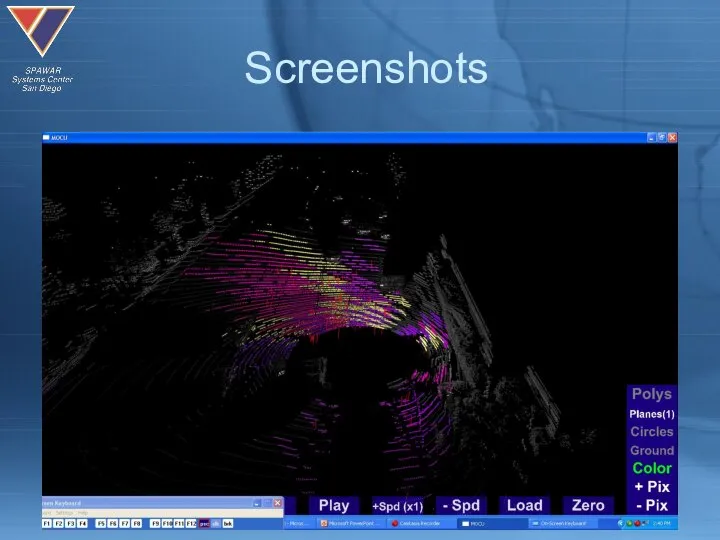
- 15. Screenshots
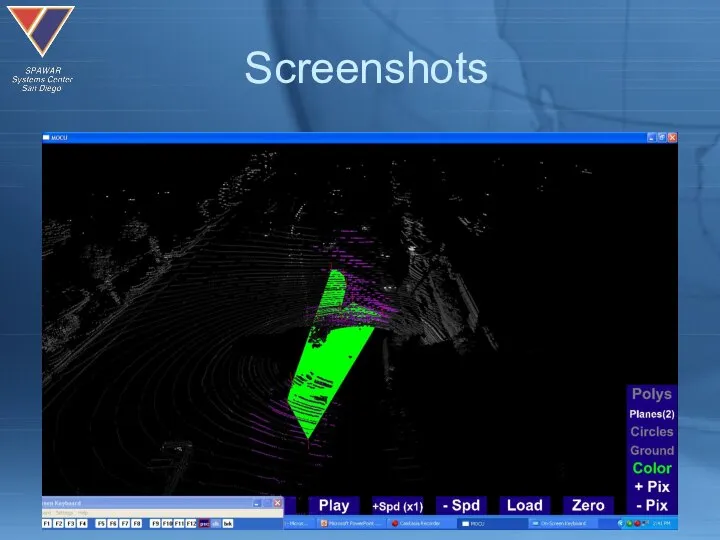
- 16. Screenshots
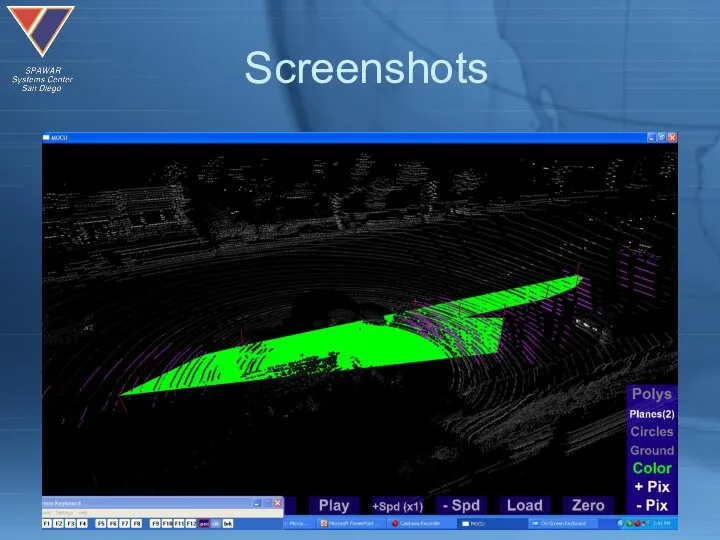
- 17. Screenshots
- 18. Screenshots
- 19. Results Good Able to produce a polygon of the road surface When classifying a set of
- 20. Future Work Once full width of the road has been detected, it should be fairly simple
- 22. Скачать презентацию

Слайд 3Velodyne
Used by CMU and Stanford in DARPA Urban Challenge races
Velodyne
Used by CMU and Stanford in DARPA Urban Challenge races
Слайд 4Velodyne Technical Specifications
Sensor
64 lasers
360 degree field of view (azimuth)
0.09
Velodyne Technical Specifications
Sensor
64 lasers
360 degree field of view (azimuth)
0.09
Слайд 5Problem Statement & Motivation
Computer vision has a tough time determining range in
Problem Statement & Motivation
Computer vision has a tough time determining range in
Слайд 6Related Research & Basic Approach
Stamos, Allen, “Geometry and texture recovery of scenes
Related Research & Basic Approach
Stamos, Allen, “Geometry and texture recovery of scenes
Слайд 7Intersection of Planes
Intersection of Planes
Слайд 8Edges of Photos
Edges of Photos
Слайд 9Combine Intersections and Edges
Combine Intersections and Edges
Слайд 10Final Result
Final Result
Слайд 11My Approach
Select points randomly from lidar (1 million/second)
This should allow real-time processing
My Approach
Select points randomly from lidar (1 million/second)
This should allow real-time processing
Слайд 12My Approach
Random points and their respective planes and normals
Compare surface normals and
My Approach
Random points and their respective planes and normals
Compare surface normals and
Слайд 13Demonstration
Demonstration
Слайд 14Screenshots
Screenshots
Слайд 15Screenshots
Screenshots
Слайд 16Screenshots
Screenshots
Слайд 17Screenshots
Screenshots
Слайд 18Screenshots
Screenshots
Слайд 19Results
Good
Able to produce a polygon of the road surface
When classifying a set
Results
Good
Able to produce a polygon of the road surface
When classifying a set
Слайд 20Future Work
Once full width of the road has been detected, it should
Future Work
Once full width of the road has been detected, it should
 Защиты авторских прав в сети Internet
Защиты авторских прав в сети Internet Можлывості компютера
Можлывості компютера Организация службы документационного обеспечения управления на примере ООО СОЮЗ
Организация службы документационного обеспечения управления на примере ООО СОЮЗ Программирование. Базовая архитектура IBM PC Х86
Программирование. Базовая архитектура IBM PC Х86 powerpointbase.com-1018
powerpointbase.com-1018 Методика построения А3. Дивизион Сталь Дирекция по операционным улучшения
Методика построения А3. Дивизион Сталь Дирекция по операционным улучшения Как определить пользу и вред компьютерных игр
Как определить пользу и вред компьютерных игр Data Quality DWBI Test Plan and Test Strategy
Data Quality DWBI Test Plan and Test Strategy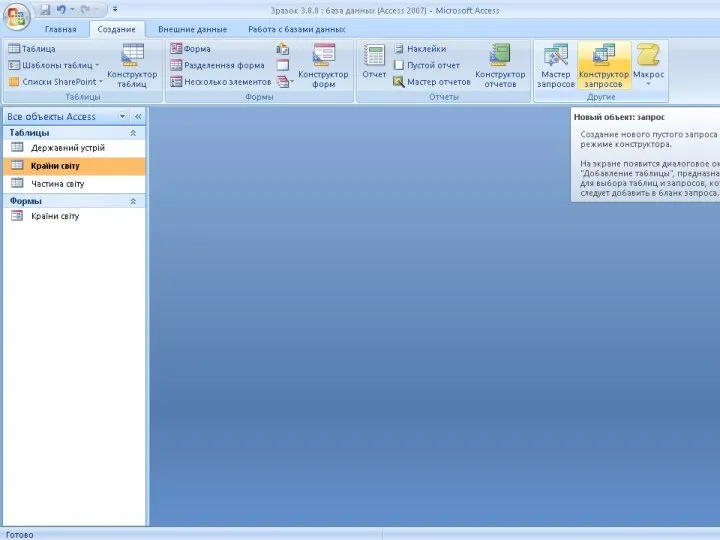 Базы данных. Запрос параметров
Базы данных. Запрос параметров Информационные носители
Информационные носители Правила безопасности в интернете
Правила безопасности в интернете Компьютерные объекты. Файлы и папки
Компьютерные объекты. Файлы и папки Биография И.А. Крылова
Биография И.А. Крылова Презентация на тему Что такое биоинформатика
Презентация на тему Что такое биоинформатика  Дискретизация
Дискретизация Готовимся к ГИА (А2, В11,В12) Гамова Юлия Занефовна учитель информатики и ИКТ МБОУ «Лицей №3» Г.Саров, Нижегородской области
Готовимся к ГИА (А2, В11,В12) Гамова Юлия Занефовна учитель информатики и ИКТ МБОУ «Лицей №3» Г.Саров, Нижегородской области Разработка проектной и эксплуатационной документации на ИС
Разработка проектной и эксплуатационной документации на ИС История развития киберспортивных шутеров
История развития киберспортивных шутеров Программное обеспечение компьютера
Программное обеспечение компьютера Блогер: от жажды наживы до осознания ценностей
Блогер: от жажды наживы до осознания ценностей Основы алгоритмизации и программирования
Основы алгоритмизации и программирования Информация о товаре
Информация о товаре MirAccept 2.0
MirAccept 2.0 Компьютеризация транспортных процессов в логистике
Компьютеризация транспортных процессов в логистике Python IDLE. Ссылка для выбора
Python IDLE. Ссылка для выбора Процедура нормализации
Процедура нормализации От Fork/Join к Stream API
От Fork/Join к Stream API Цифровые Двойники и Дата Майнинг
Цифровые Двойники и Дата Майнинг