- Планирование загрузки центрального процессора

Содержание
- 2. Уровни планирования процессов Долгосрочное планирование – планирование заданий. Среднесрочное планирование – swapping. Краткосрочное планирование – планирование
- 3. Цели планирования Справедливость Эффективность Сокращение полного времени выполнения (turnaround time) Сокращение времени ожидания (waiting time) Сокращение
- 4. Желаемые свойства алгоритмов планирования Предсказуемость Минимизация накладных расходов. Равномерность загрузки вычислительной системы. Масштабируемость.
- 5. Параметры планирования Статические параметры вычислительной системы – например, предельные значения ее ресурсов. Статические параметры процесса –
- 6. Параметры планирования Долгосрочное планирование: Статические и динамические параметры вычислительной системы и статические параметры процесса. Среднесрочное планирование:
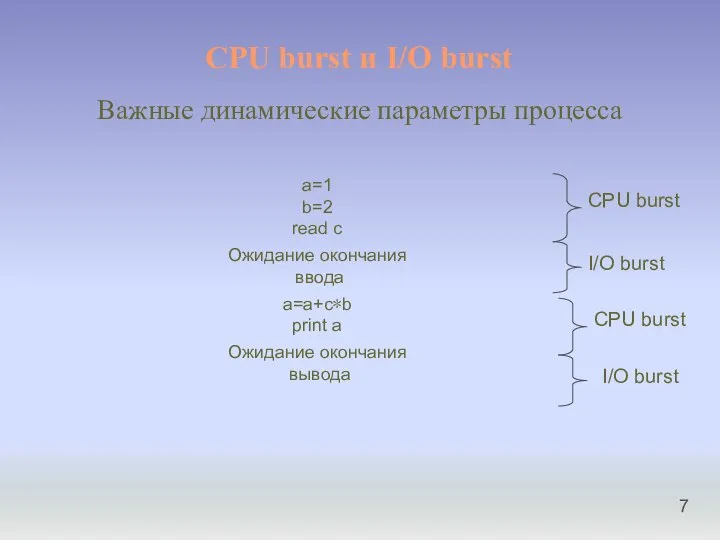
- 7. CPU burst и I/O burst Важные динамические параметры процесса a=1 b=2 read c Ожидание окончания ввода
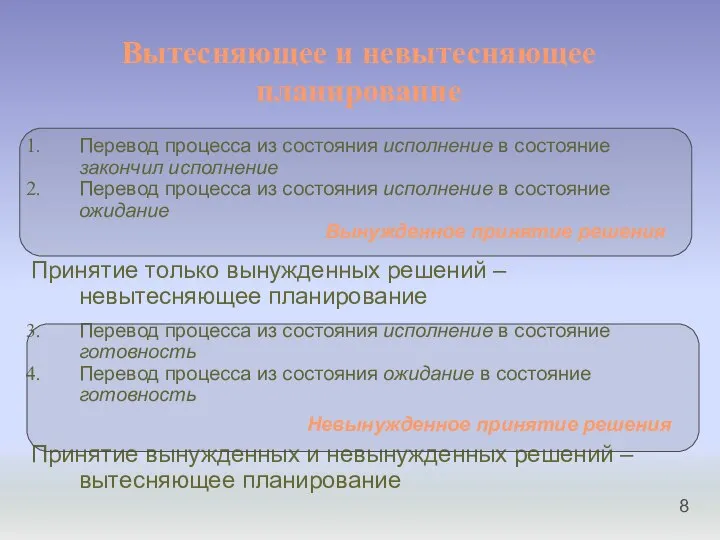
- 8. Вытесняющее и невытесняющее планирование Перевод процесса из состояния исполнение в состояние закончил исполнение Перевод процесса из
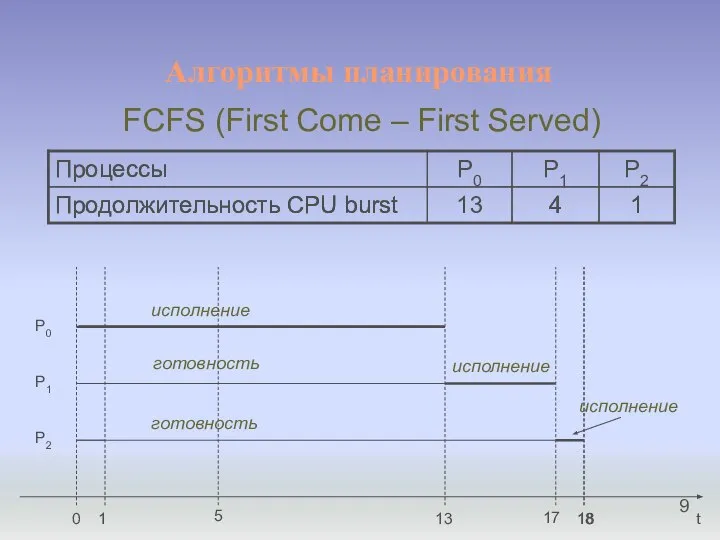
- 9. Алгоритмы планирования FCFS (First Come – First Served) t 18 17 13 0 P0 P1 P2
- 10. Алгоритмы планирования FCFS (First Come – First Served) t 18 17 13 0 P0 P1 P2
- 11. Алгоритмы планирования RR (Round Robin) Процесс 1 Процесс 2 Процесс 3 Процесс 4 готовность готовность готовность
- 12. Алгоритмы планирования Остаток времени CPU burst процесс освобождает процессор до истечения кванта; на исполнение выбираем новый
- 13. Алгоритмы планирования RR (Round Robin) Величина кванта времени – 4 И И И И Г Г
- 14. Алгоритмы планирования RR (Round Robin) Величина кванта времени – 1 И Г Г P0 P1 P2
- 15. Алгоритмы планирования SJF (Shortest Job First) невытесняющий И Г Г Г И И И Г Г
- 16. Алгоритмы планирования SJF (Shortest Job First) вытесняющий И Г P0 P1 P2 готовность P3 исполнение P3
- 17. Алгоритмы планирования τ(n) – величина n-го CPU burst T(n+1) – предсказание для n+1-го CPU burst α
- 18. Алгоритмы планирования В системе разделения времени N пользователей: Ti – время нахождения i-го пользователя в системе
- 19. Алгоритмы планирования Приоритетное планирование Каждому процессу процессор выделяется в соответствии с приписанным к нему числовым значением
- 20. Алгоритмы планирования Приоритетное планирование невытесняющий И Г P0 P1 P2 готовность P3 исполнение P3 P1 P0
- 21. Алгоритмы планирования Приоритетное планирование вытесняющий И Г P0 P1 P2 готовность P3 исполнение P3 P1 P0
- 22. Алгоритмы планирования Многоуровневые очереди (Multilevel Queue) Системные процессы приоритет 0 Процессы ректората приоритет 1 Процессы преподавателей
- 23. Алгоритмы планирования Многоуровневые очереди с обратной связью (Multilevel Feedback Queue) Очередь 0 – Приоритет 0 Очередь
- 24. Алгоритмы планирования Многоуровневые очереди с обратной связью (Multilevel Feedback Queue) Для полного описания необходимо задать -
- 25. Квантование времени для задач
- 26. Планирование Windows NT
- 27. Приоритеты Windows NT
- 28. Классы приоритета процессов Относительный приоритет задач
- 29. Функции Win32API для управления приоритетами задач и процессов CreateProcess – создание процесса BOOL CreateProcess( LPCTSTR lpApplicationName,
- 30. Функции Win32API для управления приоритетами задач и процессов CreateThread – создание задачи (потока, цепочки) HANDLE CreateThread(
- 31. Функции Win32API для управления приоритетами задач и процессов Управление запущенными задачами BOOL SetThreadPriority( HANDLE hThread, //
- 32. Традиционное планирование UNIX
- 34. Скачать презентацию
Слайд 2Уровни планирования процессов
Долгосрочное планирование – планирование заданий.
Среднесрочное планирование – swapping.
Краткосрочное планирование –
Уровни планирования процессов
Долгосрочное планирование – планирование заданий.
Среднесрочное планирование – swapping.
Краткосрочное планирование –
Слайд 3Цели планирования
Справедливость
Эффективность
Сокращение полного времени выполнения (turnaround time)
Сокращение времени ожидания (waiting time)
Сокращение
Цели планирования
Справедливость
Эффективность
Сокращение полного времени выполнения (turnaround time)
Сокращение времени ожидания (waiting time)
Сокращение
Слайд 4Желаемые свойства
алгоритмов планирования
Предсказуемость
Минимизация накладных расходов.
Равномерность загрузки вычислительной системы.
Масштабируемость.
Желаемые свойства
алгоритмов планирования
Предсказуемость
Минимизация накладных расходов.
Равномерность загрузки вычислительной системы.
Масштабируемость.
Слайд 5Параметры планирования
Статические параметры вычислительной системы – например, предельные значения ее ресурсов.
Статические параметры
Параметры планирования
Статические параметры вычислительной системы – например, предельные значения ее ресурсов.
Статические параметры
Слайд 6Параметры планирования
Долгосрочное планирование:
Статические и динамические параметры вычислительной системы и статические параметры процесса.
Параметры планирования
Долгосрочное планирование:
Статические и динамические параметры вычислительной системы и статические параметры процесса.
Слайд 7CPU burst и I/O burst
Важные динамические параметры процесса
a=1
b=2
read c
Ожидание окончания
ввода
a=a+c∗b
print a
Ожидание
CPU burst и I/O burst
Важные динамические параметры процесса
a=1
b=2
read c
Ожидание окончания
ввода
a=a+c∗b
print a
Ожидание
Слайд 8Вытесняющее и невытесняющее планирование
Перевод процесса из состояния исполнение в состояние закончил исполнение
Перевод
Вытесняющее и невытесняющее планирование
Перевод процесса из состояния исполнение в состояние закончил исполнение
Перевод
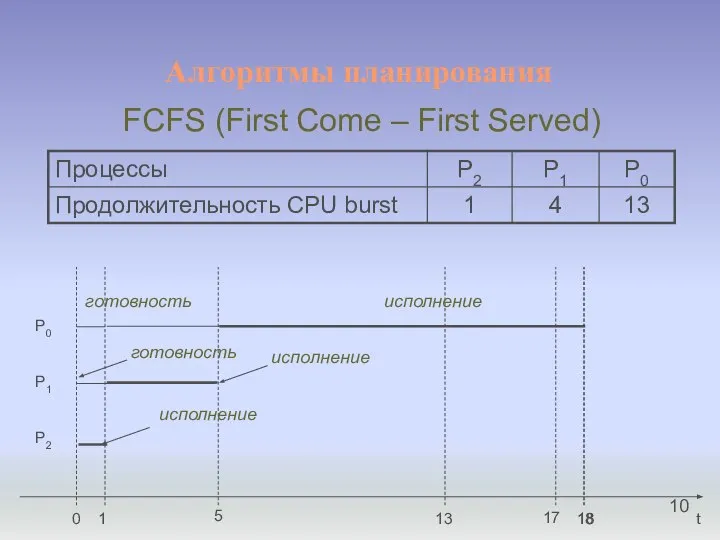
Слайд 9Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
исполнение
исполнение
готовность
1
5
18
Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
исполнение
исполнение
готовность
1
5
18
Слайд 10Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
исполнение
исполнение
готовность
1
5
18
Алгоритмы планирования
FCFS (First Come – First Served)
t
18
17
13
0
P0
P1
P2
исполнение
готовность
исполнение
исполнение
готовность
1
5
18
Слайд 11Алгоритмы планирования
RR (Round Robin)
Процесс 1
Процесс 2
Процесс 3
Процесс 4
готовность
готовность
готовность
исполнение
Процессор
Процесс 3
Процесс 3
Процесс 4
исполнение
готовность
готовность
готовность
готовность
Процесс 4
Процесс
Алгоритмы планирования
RR (Round Robin)
Процесс 1
Процесс 2
Процесс 3
Процесс 4
готовность
готовность
готовность
исполнение
Процессор
Процесс 3
Процесс 3
Процесс 4
исполнение
готовность
готовность
готовность
готовность
Процесс 4
Процесс

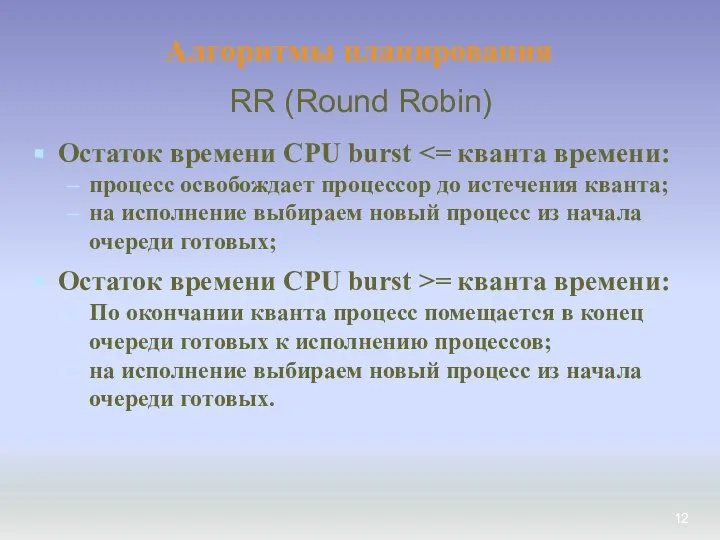
Слайд 12Алгоритмы планирования
Остаток времени CPU burst <= кванта времени:
процесс освобождает процессор до истечения
Алгоритмы планирования
Остаток времени CPU burst <= кванта времени:
процесс освобождает процессор до истечения
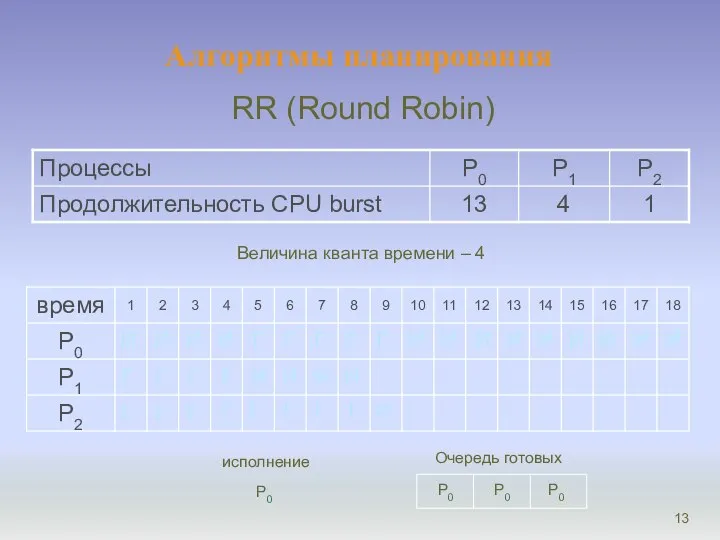
Слайд 13Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 4
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P1
P2
P0
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P2
P0
И
Г
P0
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 4
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P1
P2
P0
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
P2
P0
И
Г
P0
И
И
И
И
И
И
И
И
И
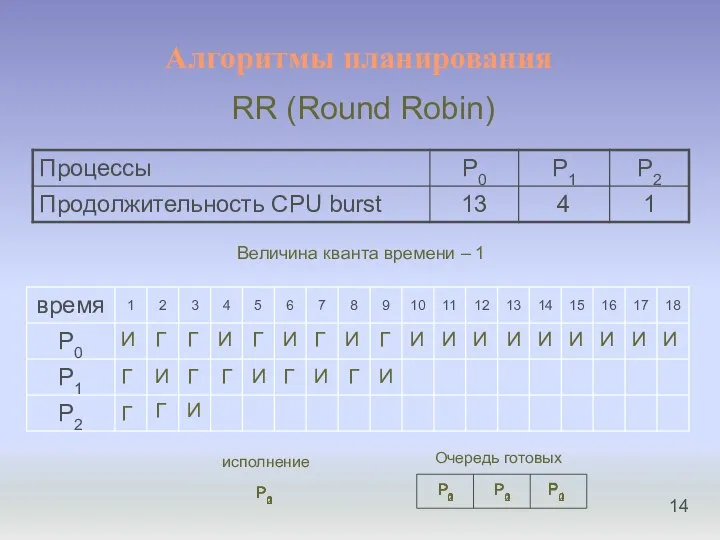
Слайд 14Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 1
И
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P2
P0
P0
P1
И
Г
Г
P1
P2
P1
И
Г
Г
P0
P1
И
Г
P1
И
Г
И
Г
И
Г
И
Г
И
Г
И
И
И
И
И
И
И
И
И
Алгоритмы планирования
RR (Round Robin)
Величина кванта времени – 1
И
Г
Г
P0
P1
P2
Очередь готовых
P0
исполнение
P1
P2
P0
P2
P0
P0
P1
И
Г
Г
P1
P2
P1
И
Г
Г
P0
P1
И
Г
P1
И
Г
И
Г
И
Г
И
Г
И
Г
И
И
И
И
И
И
И
И
И
Слайд 15Алгоритмы планирования
SJF (Shortest Job First)
невытесняющий
И
Г
Г
Г
И
И
И
Г
Г
Г
Г
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
И
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Алгоритмы планирования
SJF (Shortest Job First)
невытесняющий
И
Г
Г
Г
И
И
И
Г
Г
Г
Г
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
И
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2

Слайд 16Алгоритмы планирования
SJF (Shortest Job First)
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
Г
Г
И
И
Г
Г
И
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Алгоритмы планирования
SJF (Shortest Job First)
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
Г
Г
И
И
Г
Г
И
Г
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И

Слайд 17Алгоритмы планирования
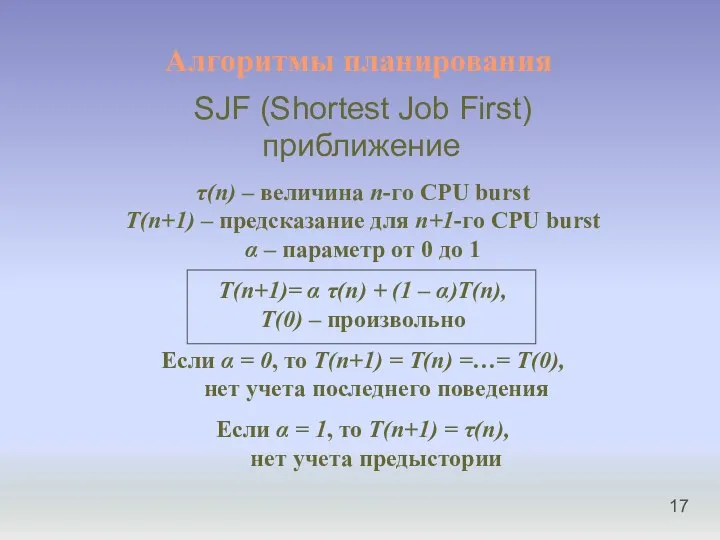
τ(n) – величина n-го CPU burst
T(n+1) – предсказание для n+1-го CPU
Алгоритмы планирования
τ(n) – величина n-го CPU burst
T(n+1) – предсказание для n+1-го CPU
Слайд 18Алгоритмы планирования
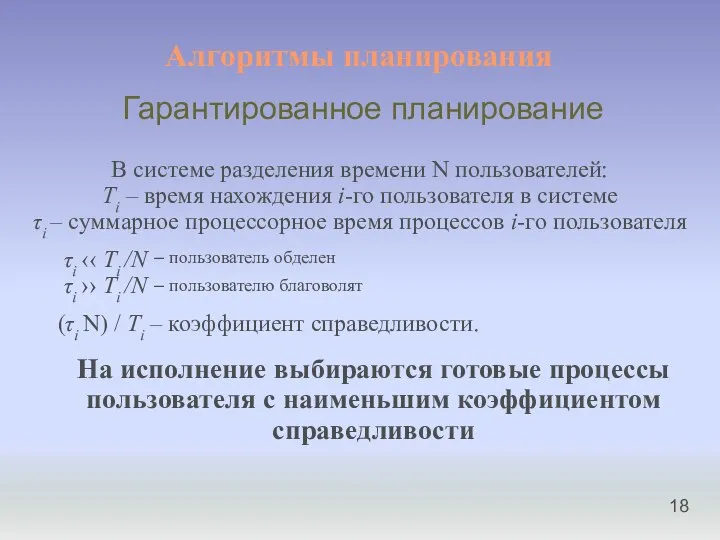
В системе разделения времени N пользователей:
Ti – время нахождения i-го
Алгоритмы планирования
В системе разделения времени N пользователей:
Ti – время нахождения i-го
Слайд 19Алгоритмы планирования
Приоритетное планирование
Каждому процессу процессор выделяется в соответствии с приписанным к нему
Алгоритмы планирования
Приоритетное планирование
Каждому процессу процессор выделяется в соответствии с приписанным к нему
Слайд 20Алгоритмы планирования
Приоритетное планирование
невытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
И
И
Г
Г
И
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Г
Г
Г
Г
Алгоритмы планирования
Приоритетное планирование
невытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
И
И
Г
Г
И
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Г
Г
Г
Г

Слайд 21Алгоритмы планирования
Приоритетное планирование
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
И
И
Г
Г
И
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г
Алгоритмы планирования
Приоритетное планирование
вытесняющий
И
Г
P0
P1
P2
готовность
P3
исполнение
P3
P1
P0
P2
Г
И
И
И
Г
Г
И
И
Г
Г
И
Г
И
И
И
И
И
Г
Г
Г
Г
Г
И
И
И
И
И
И
Г
Г
Г
Г
Г
Г
Г
Г

Слайд 22Алгоритмы планирования
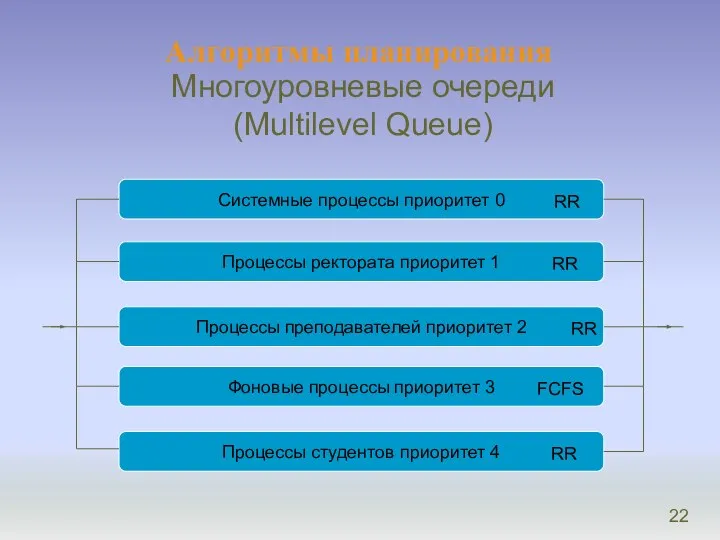
Многоуровневые очереди
(Multilevel Queue)
Системные процессы приоритет 0
Процессы ректората приоритет 1
Процессы преподавателей приоритет
Алгоритмы планирования
Многоуровневые очереди
(Multilevel Queue)
Системные процессы приоритет 0
Процессы ректората приоритет 1
Процессы преподавателей приоритет
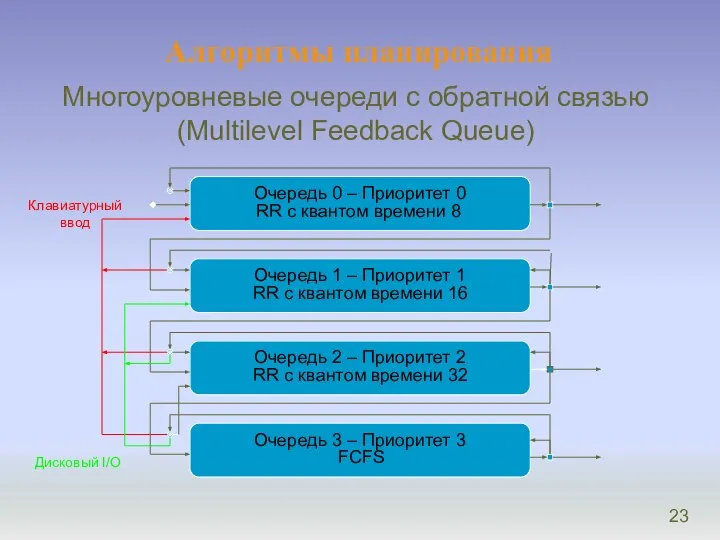
Слайд 23Алгоритмы планирования
Многоуровневые очереди с обратной связью
(Multilevel Feedback Queue)
Очередь 0 – Приоритет 0
Очередь
Алгоритмы планирования
Многоуровневые очереди с обратной связью
(Multilevel Feedback Queue)
Очередь 0 – Приоритет 0
Очередь
Слайд 24Алгоритмы планирования
Многоуровневые очереди с обратной связью
(Multilevel Feedback Queue)
Для полного описания необходимо задать
-
Алгоритмы планирования
Многоуровневые очереди с обратной связью
(Multilevel Feedback Queue)
Для полного описания необходимо задать
-
Слайд 25 Квантование времени для задач
Квантование времени для задач

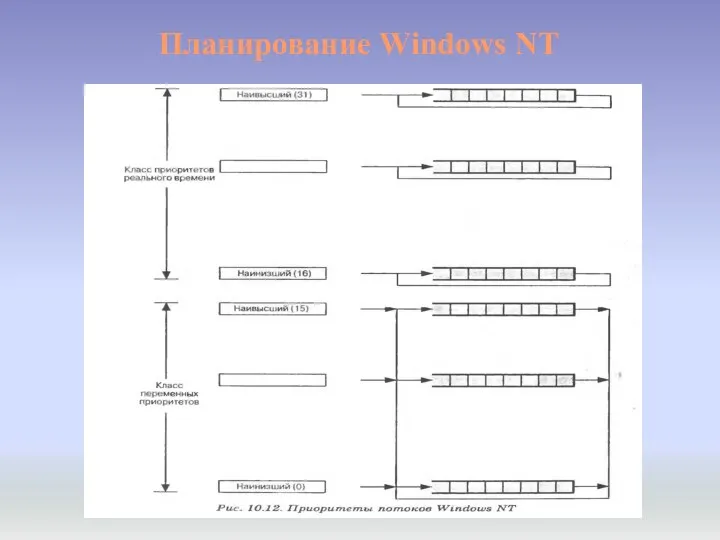
Слайд 26 Планирование Windows NT
Планирование Windows NT
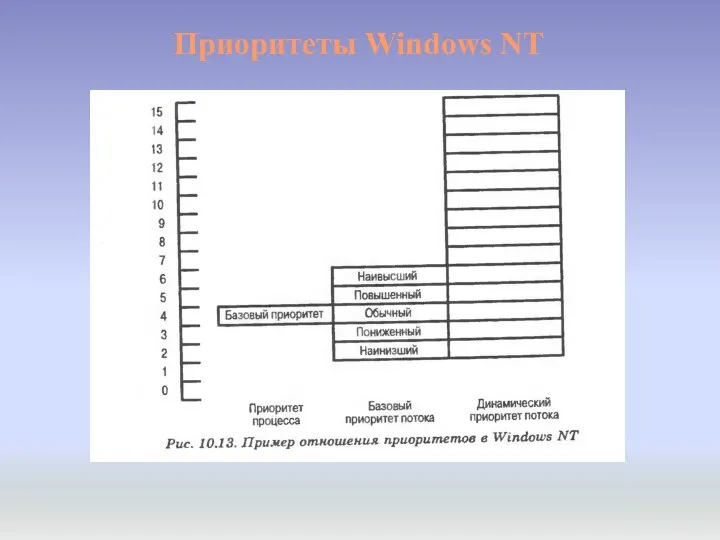
Слайд 27 Приоритеты Windows NT
Приоритеты Windows NT
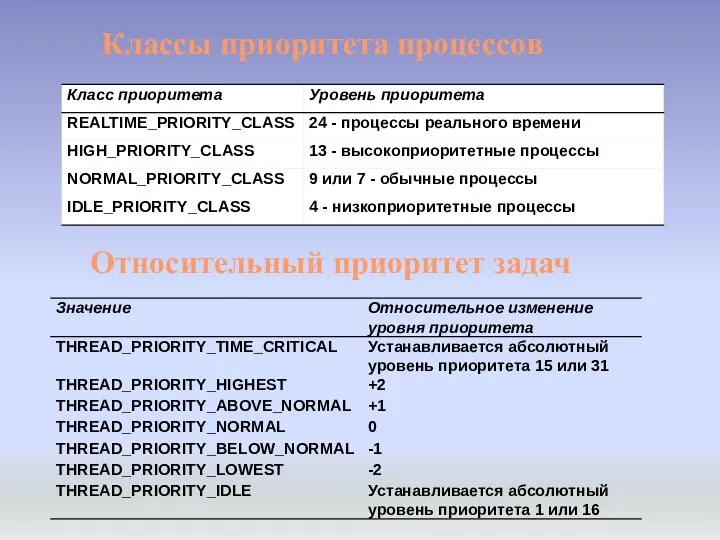
Слайд 28 Классы приоритета процессов
Относительный приоритет задач
Классы приоритета процессов
Относительный приоритет задач
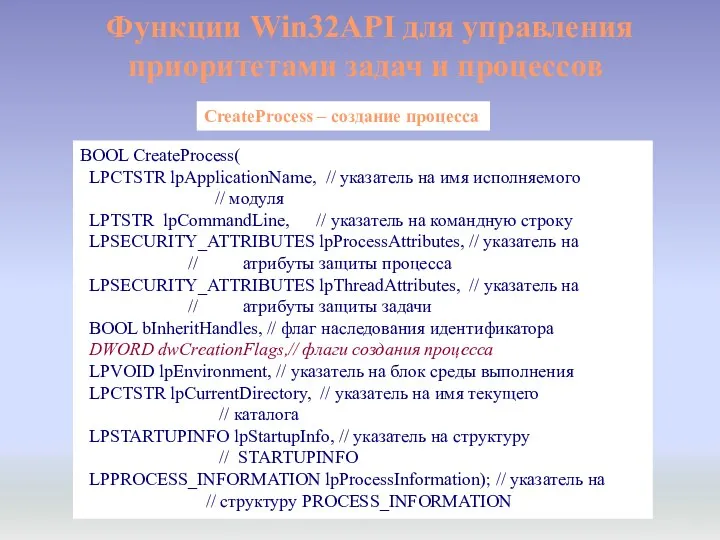
Слайд 29 Функции Win32API для управления приоритетами задач и процессов
CreateProcess – создание процесса
BOOL
Функции Win32API для управления приоритетами задач и процессов
CreateProcess – создание процесса
BOOL
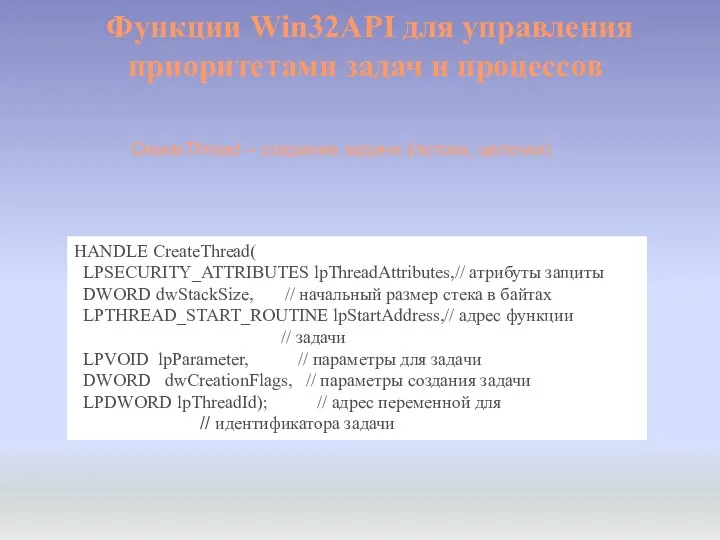
Слайд 30 Функции Win32API для управления приоритетами задач и процессов
CreateThread – создание задачи
Функции Win32API для управления приоритетами задач и процессов
CreateThread – создание задачи
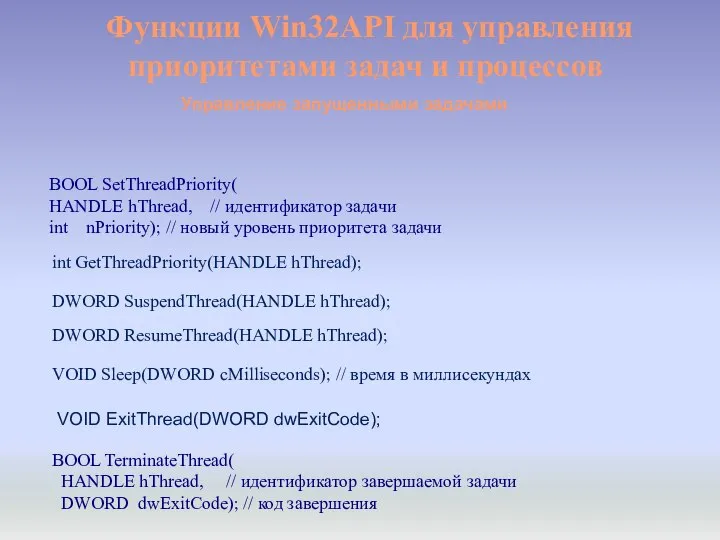
Слайд 31 Функции Win32API для управления приоритетами задач и процессов
Управление запущенными задачами
BOOL
Функции Win32API для управления приоритетами задач и процессов
Управление запущенными задачами
BOOL
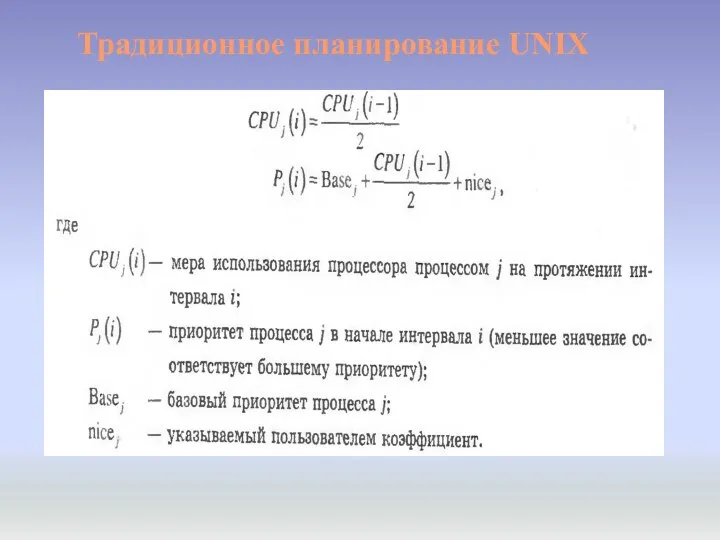
Слайд 32 Традиционное планирование UNIX
Традиционное планирование UNIX
 Конкурс Сэлфи-марафон
Конкурс Сэлфи-марафон Обработка числовой последовательности на языке Python 3.9. Задание 17
Обработка числовой последовательности на языке Python 3.9. Задание 17 Журнал Культура и политика 2016 в словах и образах
Журнал Культура и политика 2016 в словах и образах Особенности проведения ГИА-11, ГИА-9
Особенности проведения ГИА-11, ГИА-9 Концепция развития сервисного обслуживания предприятий Машиностроительного комплекса
Концепция развития сервисного обслуживания предприятий Машиностроительного комплекса Современные информационные технологии для автоматизации перевода
Современные информационные технологии для автоматизации перевода Вводное занятие по аппаратному обеспечению компьютерных технологий (лекция 1)
Вводное занятие по аппаратному обеспечению компьютерных технологий (лекция 1) Инструкция по устранению замятия в BNA, Escrow
Инструкция по устранению замятия в BNA, Escrow Создание сайта
Создание сайта Исследование эффективности применения индексов ColumnStore при выполнении SQL-запросов в Microsoft SQL Server 2016
Исследование эффективности применения индексов ColumnStore при выполнении SQL-запросов в Microsoft SQL Server 2016 Переключение контекста процесса
Переключение контекста процесса Логические основы компьютеров
Логические основы компьютеров Мячик детский. Иллюстрация векторная
Мячик детский. Иллюстрация векторная Презентация Бесконтактная оплата
Презентация Бесконтактная оплата Projektowanie Aplikacji Internetowych
Projektowanie Aplikacji Internetowych Дайджест самых важных новостей
Дайджест самых важных новостей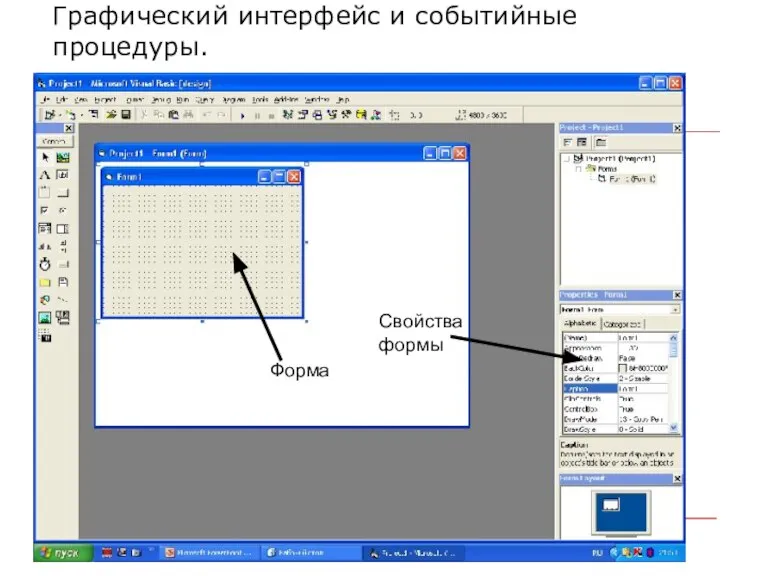 Графический интерфейс и событийные процедуры
Графический интерфейс и событийные процедуры Языки программирования. Лекция 1
Языки программирования. Лекция 1 Презентация на тему Действие с информацией. Хранение информации
Презентация на тему Действие с информацией. Хранение информации  Организация сетевого администрирования
Организация сетевого администрирования Методы и средства сбора, передачи, хранения и поиска информации
Методы и средства сбора, передачи, хранения и поиска информации Оформление фона слайда с помощью заливок
Оформление фона слайда с помощью заливок Классификация сетевого оборудования инфокоммуникационных систем и сетей
Классификация сетевого оборудования инфокоммуникационных систем и сетей Ошибки в операционных системах
Ошибки в операционных системах Монитор. Тип монитора
Монитор. Тип монитора Сервисы Упрощённый прием РПО и Упрощенное вручение РПО в ЕАС ОПС. Описание обновление функционала и возможностей
Сервисы Упрощённый прием РПО и Упрощенное вручение РПО в ЕАС ОПС. Описание обновление функционала и возможностей Электронный образовательный ресурс
Электронный образовательный ресурс Мобильное приложение. Поиск или нахождение потерянной вещи
Мобильное приложение. Поиск или нахождение потерянной вещи