- Разработка автоматизированной системы мониторинга доступа на охраняемую территорию

Содержание
- 2. ЦЕЛЬ ДИПЛОМНОЙ РАБОТЫ 2 Разработка и создание автоматизированной системы контроля за доступом на территорию отдельного радиолокационного
- 3. ФУНКЦИОНАЛЬНАЯ СХЕМА 3
- 4. ЭЛЕМЕНТНАЯ БАЗА 4 RobotDyn R3 UNO Датчик движения HC-SR 501 Датчик препятствий YL-63
- 5. ЭЛЕМЕНТНАЯ БАЗА 5 Дальномер HC-SR 04 Лазерный датчик KY-008
- 6. ВЫБОР МИКРОКОНТРОЛЛЕРА 6 Плата Arduino Uno Плата Arduino Leonardo Плата Arduino Mega Плата Arduino Nano
- 7. ЭЛЕМЕНТНАЯ БАЗА 7 Внешний вид микроконтроллера RobotDyn R3 UNO
- 8. СХЕМА ОХРАНЫ И ОБОРОНЫ ОРЛУ 8 Датчик движения Датчик движения Датчик движения Датчик движения КПП Датчик
- 9. СТРУКТУРНАЯ СХЕМА 9
- 11. Скачать презентацию
Слайд 2ЦЕЛЬ ДИПЛОМНОЙ РАБОТЫ
2
Разработка и создание автоматизированной системы контроля за доступом на территорию
ЦЕЛЬ ДИПЛОМНОЙ РАБОТЫ
2
Разработка и создание автоматизированной системы контроля за доступом на территорию
Слайд 3ФУНКЦИОНАЛЬНАЯ СХЕМА
3
ФУНКЦИОНАЛЬНАЯ СХЕМА
3

Слайд 4ЭЛЕМЕНТНАЯ БАЗА
4
RobotDyn R3 UNO
Датчик движения HC-SR 501
Датчик препятствий
YL-63
ЭЛЕМЕНТНАЯ БАЗА
4
RobotDyn R3 UNO
Датчик движения HC-SR 501
Датчик препятствий
YL-63

Слайд 5ЭЛЕМЕНТНАЯ БАЗА
5
Дальномер HC-SR 04
Лазерный датчик KY-008
ЭЛЕМЕНТНАЯ БАЗА
5
Дальномер HC-SR 04
Лазерный датчик KY-008

Слайд 6ВЫБОР МИКРОКОНТРОЛЛЕРА
6
Плата Arduino Uno
Плата Arduino Leonardo
Плата Arduino Mega
Плата Arduino Nano
ВЫБОР МИКРОКОНТРОЛЛЕРА
6
Плата Arduino Uno
Плата Arduino Leonardo
Плата Arduino Mega
Плата Arduino Nano

Слайд 7ЭЛЕМЕНТНАЯ БАЗА
7
Внешний вид микроконтроллера RobotDyn R3 UNO
ЭЛЕМЕНТНАЯ БАЗА
7
Внешний вид микроконтроллера RobotDyn R3 UNO

Слайд 8СХЕМА ОХРАНЫ И ОБОРОНЫ ОРЛУ
8
Датчик движения
Датчик движения
Датчик движения
Датчик движения
КПП
Датчик движения
Датчик движения
Датчик открытия
СХЕМА ОХРАНЫ И ОБОРОНЫ ОРЛУ
8
Датчик движения
Датчик движения
Датчик движения
Датчик движения
КПП
Датчик движения
Датчик движения
Датчик открытия

Слайд 9СТРУКТУРНАЯ СХЕМА
9
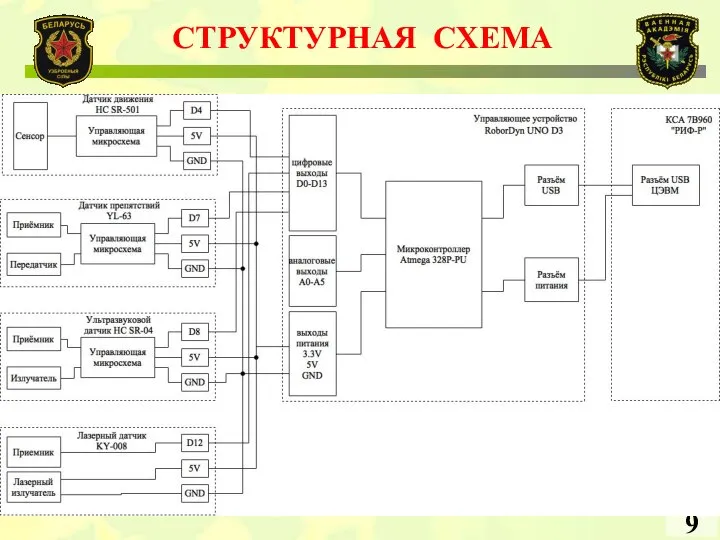
СТРУКТУРНАЯ СХЕМА
9
 Персональный компьютер
Персональный компьютер Раздел 3. Базовые информационные технологии
Раздел 3. Базовые информационные технологии Программирование в .net
Программирование в .net Clean code
Clean code Оценка Интернет сайта Департамента экономического развития Брянской области
Оценка Интернет сайта Департамента экономического развития Брянской области Компания Никос-Софт
Компания Никос-Софт Настольные игры c макросом
Настольные игры c макросом Технологии сегодня. 7 класс
Технологии сегодня. 7 класс Быть в 10 раз эффективнее благодаря Groovy
Быть в 10 раз эффективнее благодаря Groovy Системное ПО. Работа с файлами
Системное ПО. Работа с файлами б(компьютерные презентации
б(компьютерные презентации Класифікация інформаційних систем
Класифікация інформаційних систем Презентация на тему Работа с текстовой информацией в EXCEL
Презентация на тему Работа с текстовой информацией в EXCEL  Дизайн и Верстка Системы Организации Видео Архива (СОВА)
Дизайн и Верстка Системы Организации Видео Архива (СОВА) Шестой межрегиональный форум Вера и дело. Противодействие фальшивым новостям и формирование верифицированного контента
Шестой межрегиональный форум Вера и дело. Противодействие фальшивым новостям и формирование верифицированного контента Пентагон. Онлайн-игра
Пентагон. Онлайн-игра 1000PP
1000PP Морфологический анализ
Морфологический анализ Условные операторы
Условные операторы Логические модели данных. Организация баз данных в производственных системах
Логические модели данных. Организация баз данных в производственных системах СЭД для малого предприятия
СЭД для малого предприятия Создание документов в Microsoft Word. Курсы
Создание документов в Microsoft Word. Курсы Рейтинг наиболее часто посещаемых сообществ нами в ВКОНТАКТЕ
Рейтинг наиболее часто посещаемых сообществ нами в ВКОНТАКТЕ Тезаурус Безопасный интернет
Тезаурус Безопасный интернет programmirovanie_l2-2016
programmirovanie_l2-2016 Задача о перекладывании камней
Задача о перекладывании камней Мир здоровья и страхования в одной программе на ладони смартфона
Мир здоровья и страхования в одной программе на ладони смартфона Интернет технологии в образовании
Интернет технологии в образовании