- Режимы построения объектов. Использование режимов ОРТО и ПОЛЯР

Содержание
- 2. Разделы: Сетка Динамический ввод Использование режимов ОРТО и ПОЛЯР Привязка Практическая работа
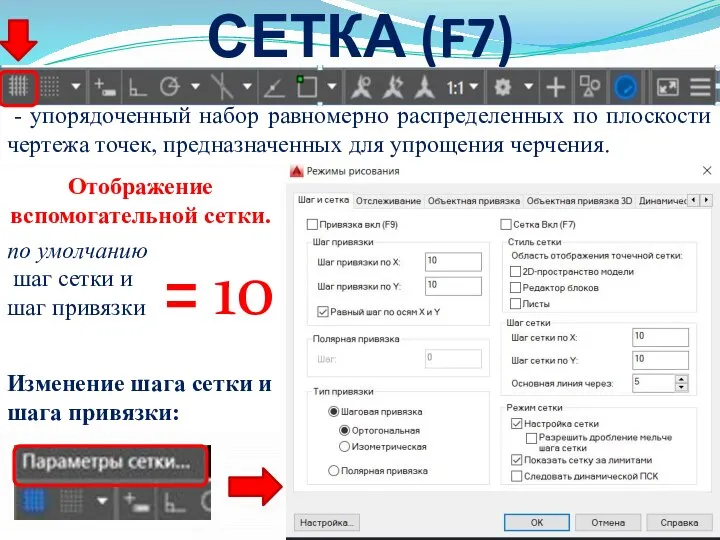
- 3. Отображение вспомогательной сетки. по умолчанию шаг сетки и шаг привязки Изменение шага сетки и шага привязки:
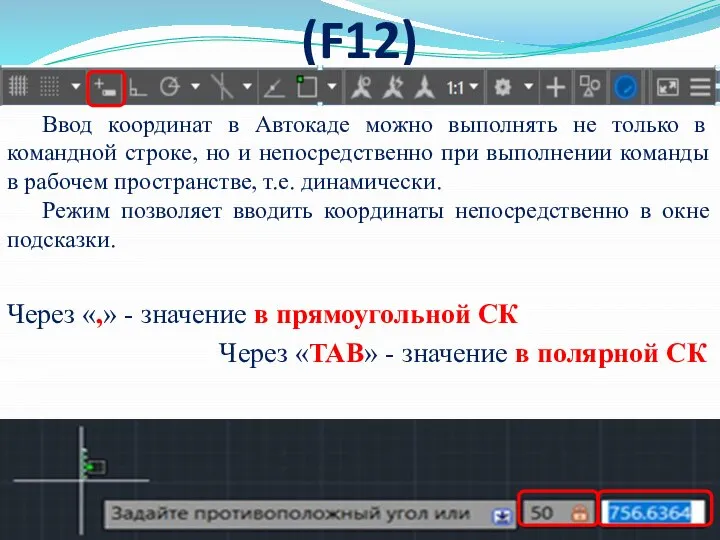
- 4. ДИНАМИЧЕСКИЙ ВВОД (F12) Ввод координат в Автокаде можно выполнять не только в командной строке, но и
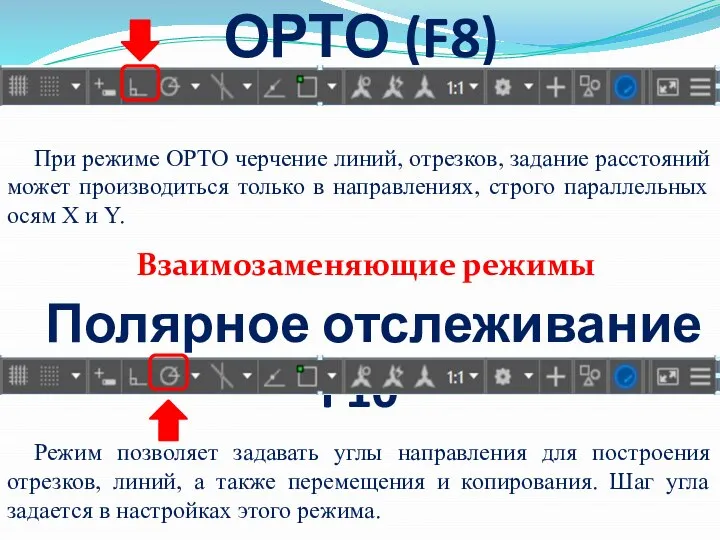
- 5. Полярное отслеживание F10 При режиме ОРТО черчение линий, отрезков, задание расстояний может производиться только в направлениях,
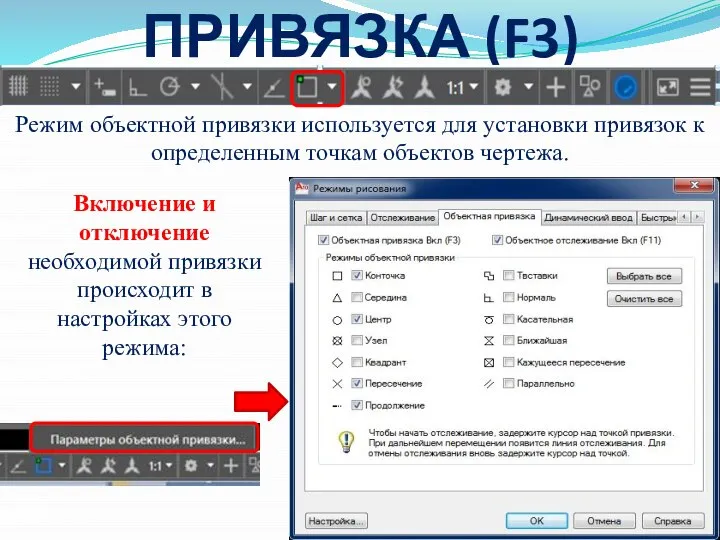
- 6. Режим объектной привязки используется для установки привязок к определенным точкам объектов чертежа. ПРИВЯЗКА (F3) Включение и
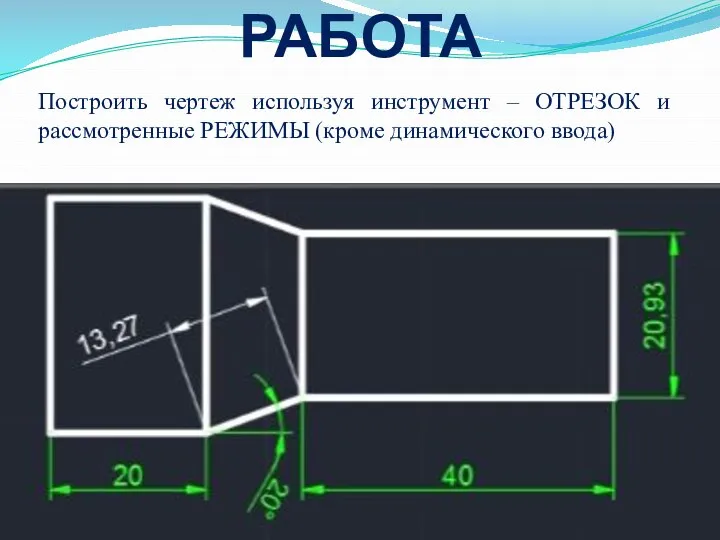
- 7. ПРАКТИЧЕСКАЯ РАБОТА Построить чертеж используя инструмент – ОТРЕЗОК и рассмотренные РЕЖИМЫ (кроме динамического ввода)
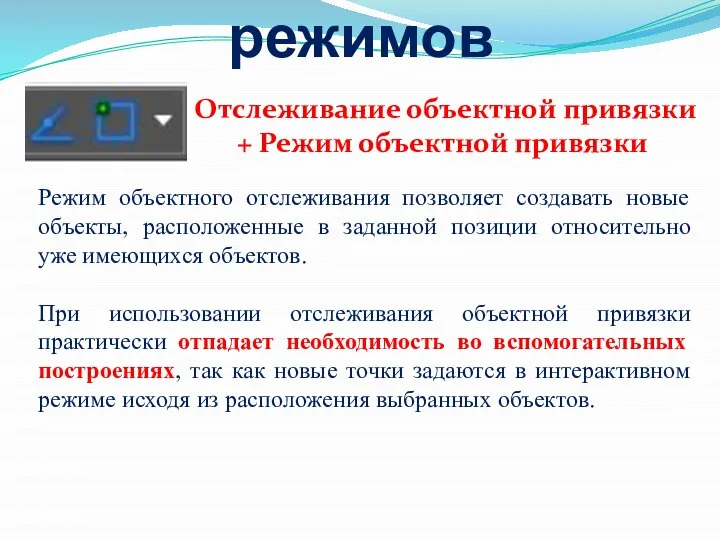
- 8. Комбинация режимов Отслеживание объектной привязки + Режим объектной привязки Режим объектного отслеживания позволяет создавать новые объекты,
- 10. Скачать презентацию
Слайд 3Отображение вспомогательной сетки.
по умолчанию
шаг сетки и
шаг привязки
Изменение шага сетки
Отображение вспомогательной сетки.
по умолчанию
шаг сетки и
шаг привязки
Изменение шага сетки
Слайд 4ДИНАМИЧЕСКИЙ ВВОД (F12)
Ввод координат в Автокаде можно выполнять не только в
ДИНАМИЧЕСКИЙ ВВОД (F12)
Ввод координат в Автокаде можно выполнять не только в
Слайд 5Полярное отслеживание F10
При режиме ОРТО черчение линий, отрезков, задание расстояний может производиться
Полярное отслеживание F10
При режиме ОРТО черчение линий, отрезков, задание расстояний может производиться
Слайд 6Режим объектной привязки используется для установки привязок к определенным точкам объектов чертежа.
Режим объектной привязки используется для установки привязок к определенным точкам объектов чертежа.
Слайд 7ПРАКТИЧЕСКАЯ РАБОТА
Построить чертеж используя инструмент – ОТРЕЗОК и рассмотренные РЕЖИМЫ (кроме динамического
ПРАКТИЧЕСКАЯ РАБОТА
Построить чертеж используя инструмент – ОТРЕЗОК и рассмотренные РЕЖИМЫ (кроме динамического
Слайд 8Комбинация режимов
Отслеживание объектной привязки
+ Режим объектной привязки
Режим объектного отслеживания позволяет создавать
Комбинация режимов
Отслеживание объектной привязки
+ Режим объектной привязки
Режим объектного отслеживания позволяет создавать
 7-1-2
7-1-2 Презентация на тему Блок схемы
Презентация на тему Блок схемы  #VKLIVE: прямые трансляции с мобильного устройства
#VKLIVE: прямые трансляции с мобильного устройства Математические технологии моделирования вирусной динамики
Математические технологии моделирования вирусной динамики Web-страницы. Язык HTML и др. Тема 1
Web-страницы. Язык HTML и др. Тема 1 Файлы и файловая система
Файлы и файловая система Общее и частное наследование. Права доступа. Язык С++. (Лекция 8)
Общее и частное наследование. Права доступа. Язык С++. (Лекция 8) Что такое интернет
Что такое интернет Сравнительный анализ сайтов
Сравнительный анализ сайтов Логические операции
Логические операции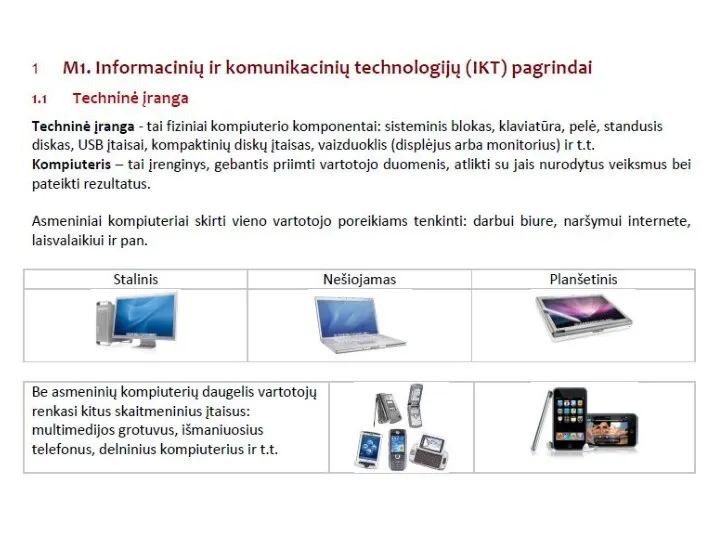 IKT pagrindai
IKT pagrindai Вася на Сене
Вася на Сене Основные технические элементы компьютерного симулятора
Основные технические элементы компьютерного симулятора Системный блок
Системный блок Исполнитель Робот
Исполнитель Робот Устройства ввода информации
Устройства ввода информации Совершенствование внеурочной учебной деятельности учащихся средствами информационных технологий
Совершенствование внеурочной учебной деятельности учащихся средствами информационных технологий Информационные процессы
Информационные процессы Помощь сетевекам при работе в интернете. Боли разных целевых аудиторий
Помощь сетевекам при работе в интернете. Боли разных целевых аудиторий Исполнитель Водолей
Исполнитель Водолей Информатика и я
Информатика и я Анализ телеграм-канала Шум и я
Анализ телеграм-канала Шум и я Каблуки - красота или здоровье?
Каблуки - красота или здоровье? Использование пакета Microsoft Office
Использование пакета Microsoft Office Время думать. Информатика
Время думать. Информатика Виды серверного ПО
Виды серверного ПО Planning the Post Sprawl Era
Planning the Post Sprawl Era Казка Фантастичний біном
Казка Фантастичний біном