- Системы управления и контроля

Содержание
- 2. Литература Э.И. Медякова Физические основы измерений. СЗПУ 2008г. Гришин Рачков М.Ю. Физические основы измерений МГИУ 2008г.
- 3. Технические измерения в машиностроении Системы автоматического контроля Основные термины пределения Пассивные системы автоматического контроля
- 4. Измерение – нахождение значения физической величины опытным путем с помощью средств измерений. Погрешность измерения – отклонение
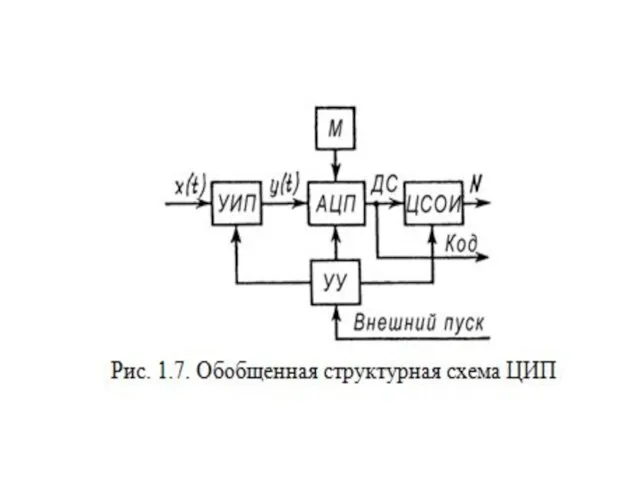
- 5. Измерительная система – совокупность СИ, соединенных между собой каналами вязи, предназначенная для выработки сигналов измерительной информации
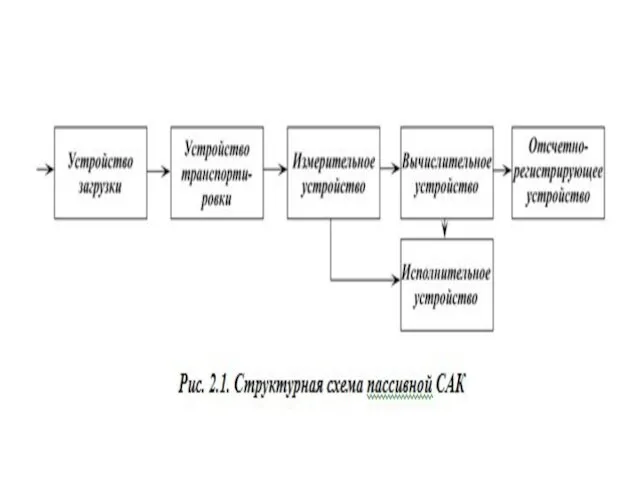
- 6. Пассивные системы автоматического контроля Структурная схема пассивной САК
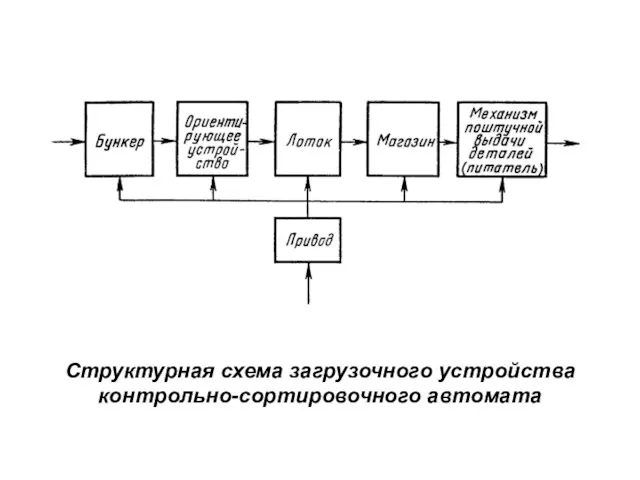
- 7. Структурная схема загрузочного устройства контрольно-сортировочного автомата
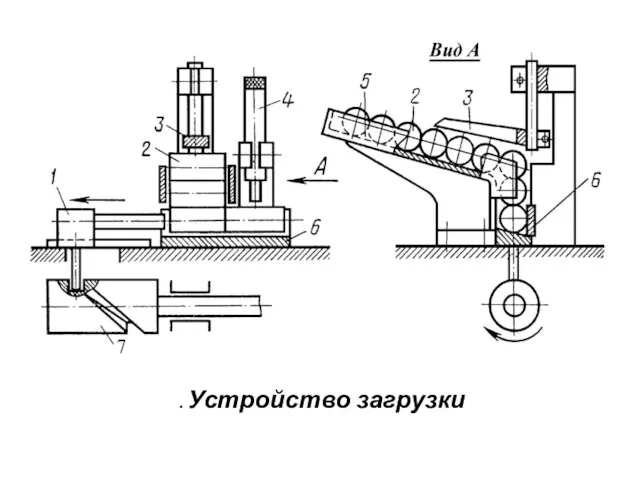
- 8. . Устройство загрузки
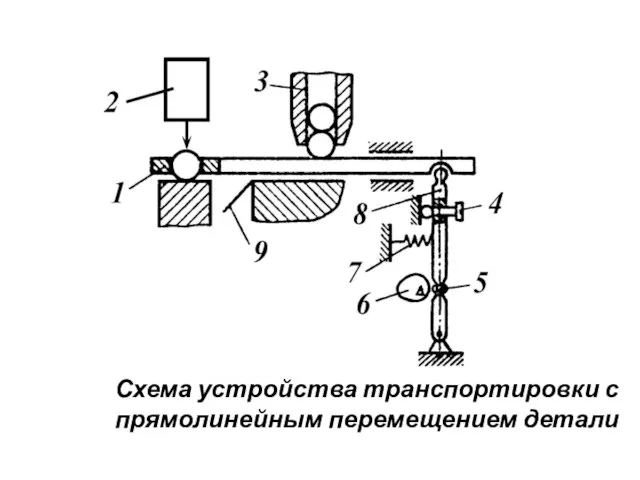
- 9. Схема устройства транспортировки с прямолинейным перемещением детали
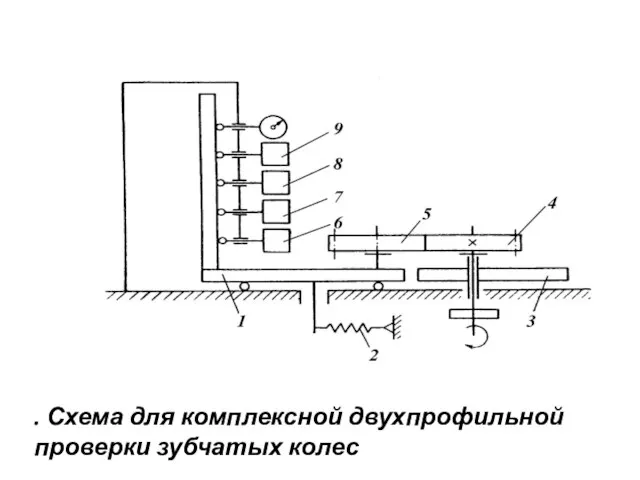
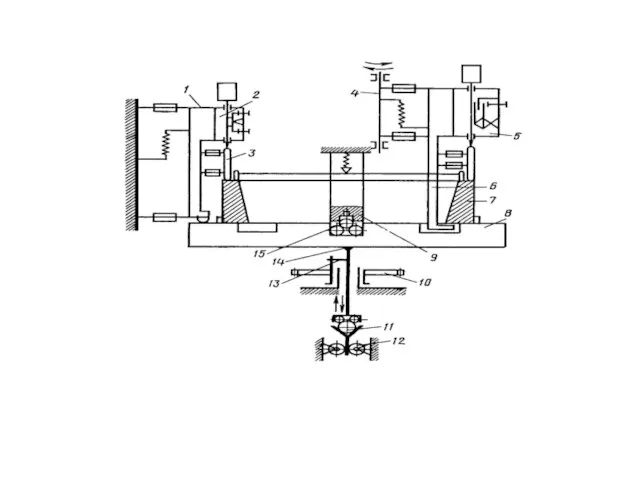
- 10. . Схема для комплексной двухпрофильной проверки зубчатых колес
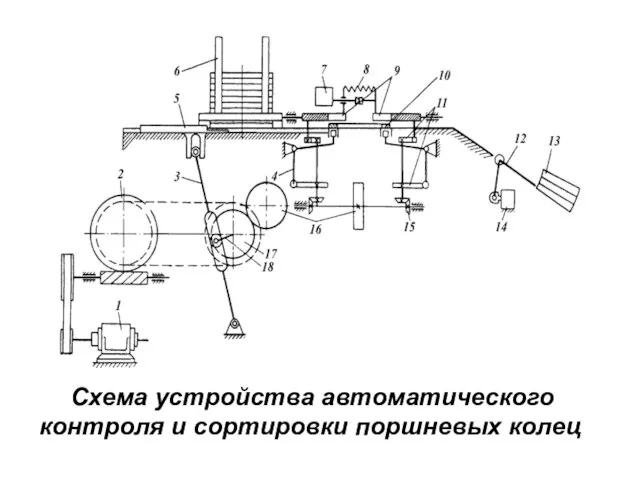
- 11. Схема устройства автоматического контроля и сортировки поршневых колец
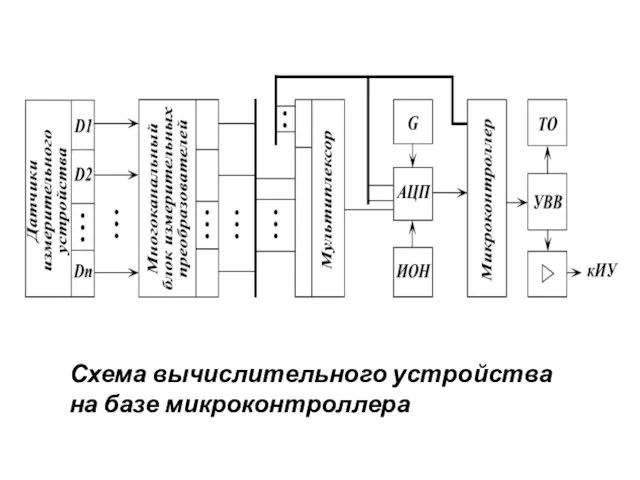
- 13. Схема вычислительного устройства на базе микроконтроллера
- 14. Циклограмма измерительной позиции устройства автоматического контроля
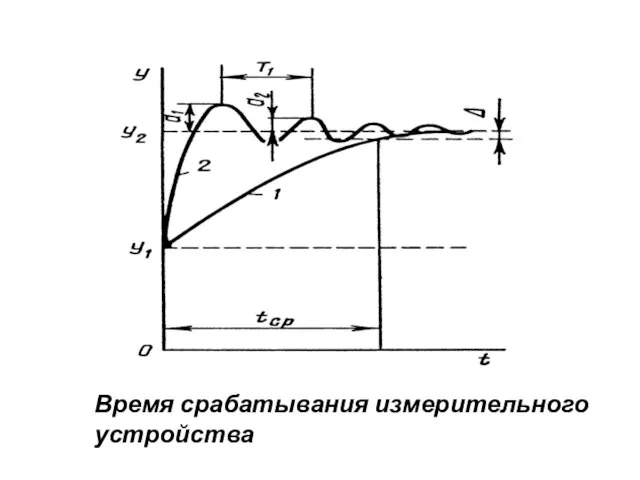
- 15. Время срабатывания измерительного устройства
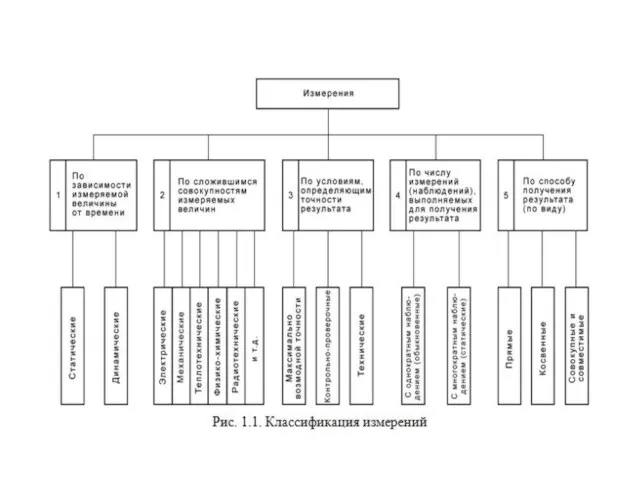
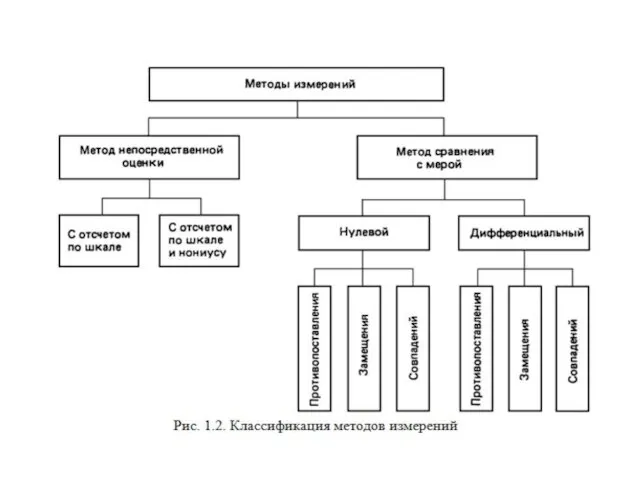
- 16. Технические измерения и приборы Классификация измерений Основные сведения об измерениях
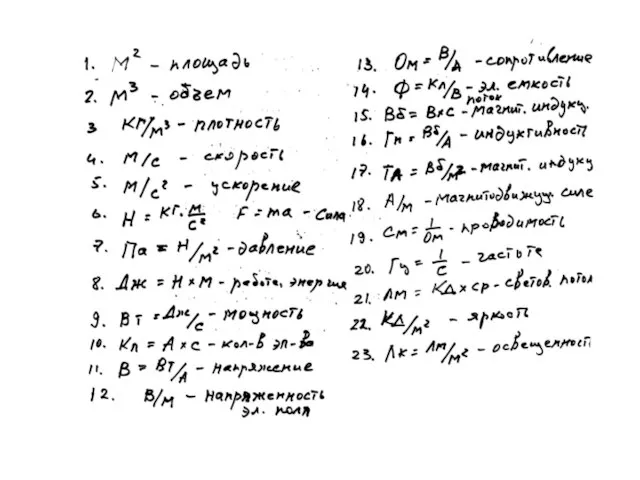
- 19. ЕДИНИЦЫ ИЗМЕРЕНИЙ
- 22. К совокупным относятся производимые одновременно измерения нескольких одноименных величин, при которых искомые значения величин находят решением
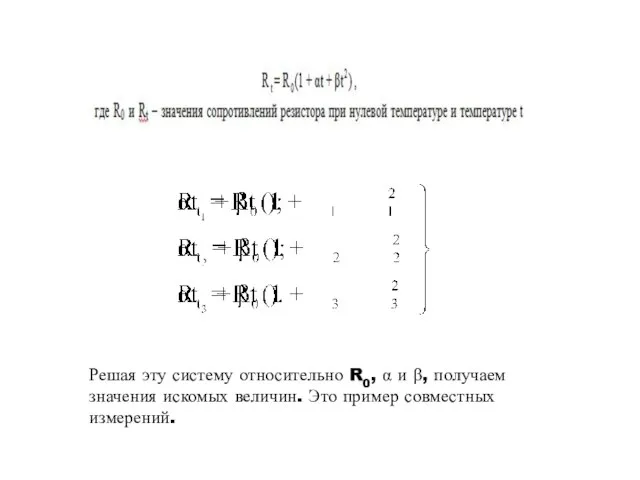
- 23. Совместные измерения – это производимые одновременно измерения двух или нескольких неодноименных величин для нахождения зависимости между
- 24. Решая эту систему относительно R0, α и β, получаем значения искомых величин. Это пример совместных измерений.
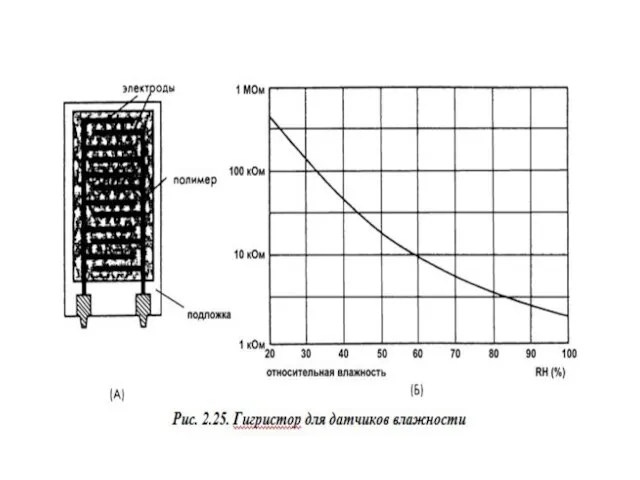
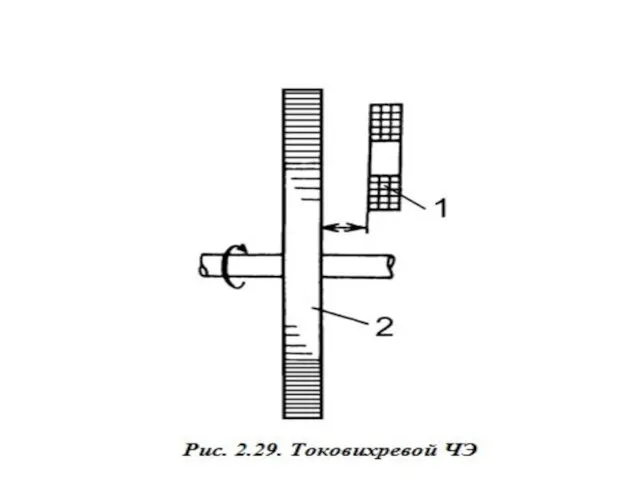
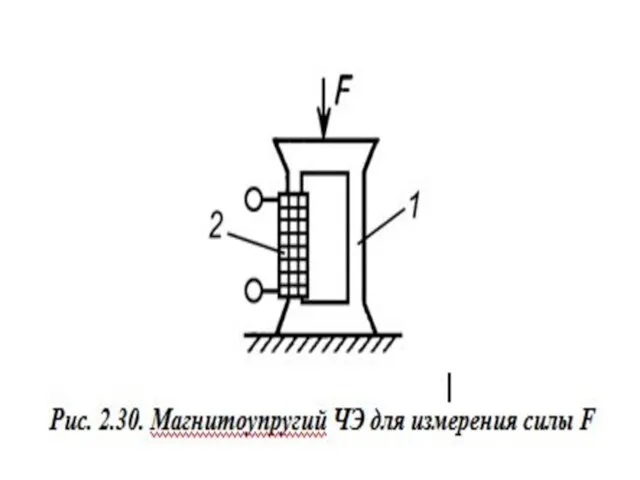
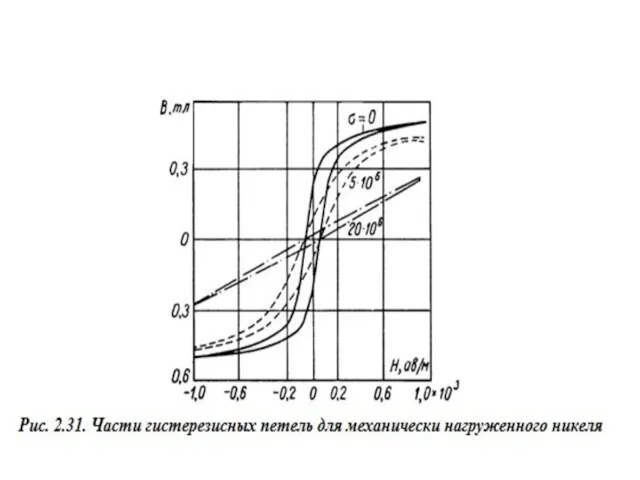
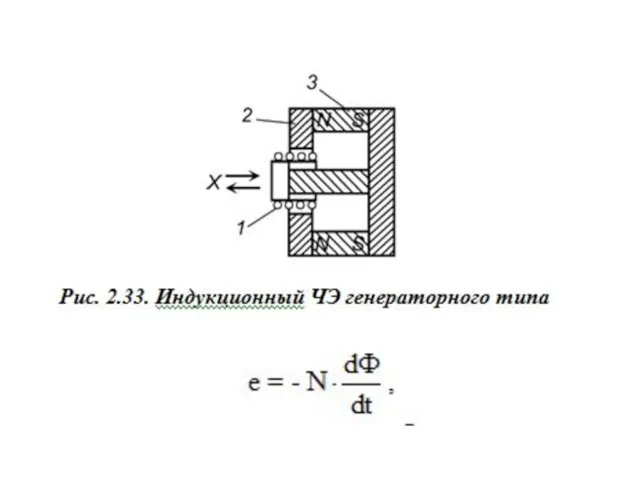
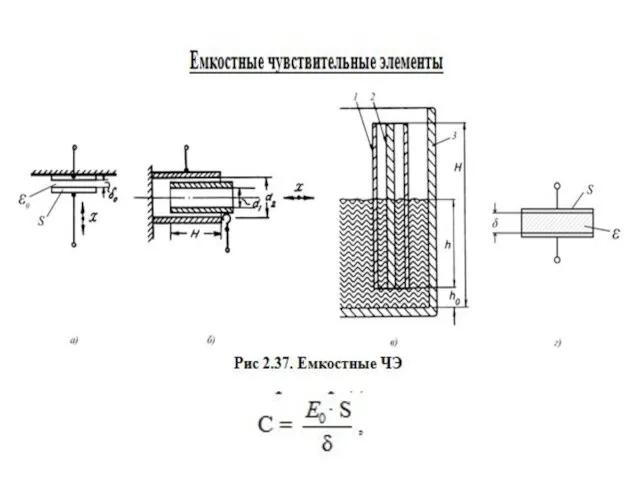
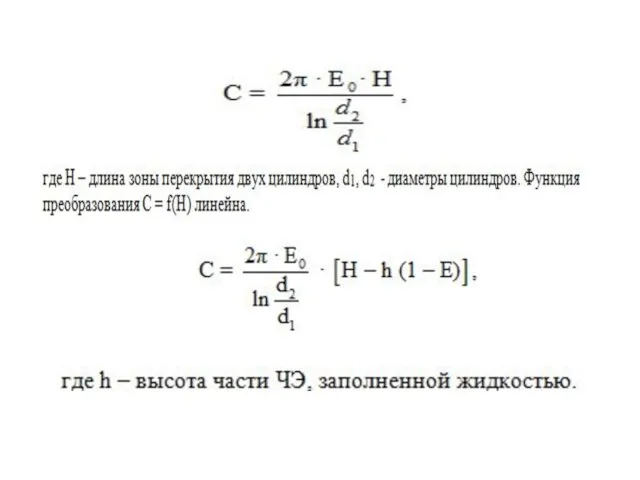
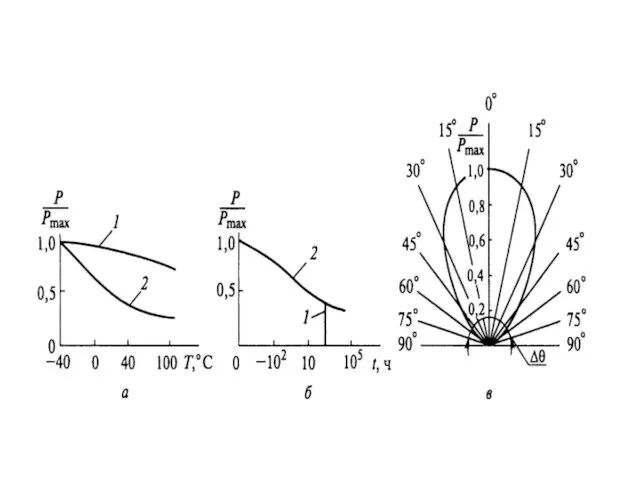
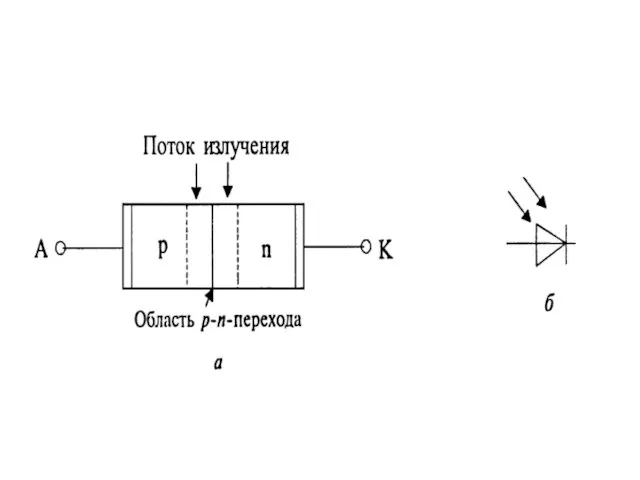
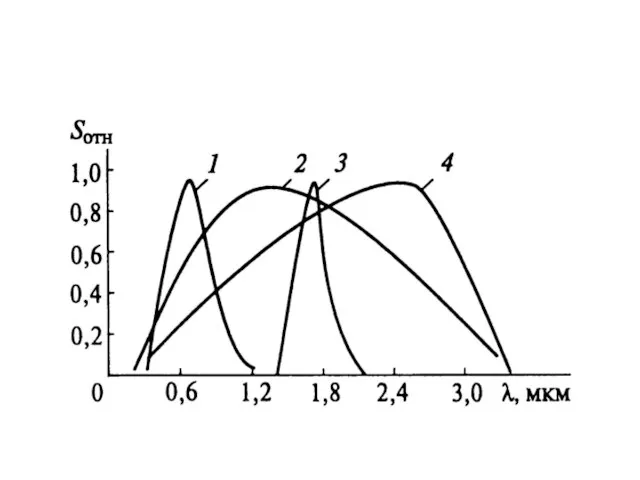
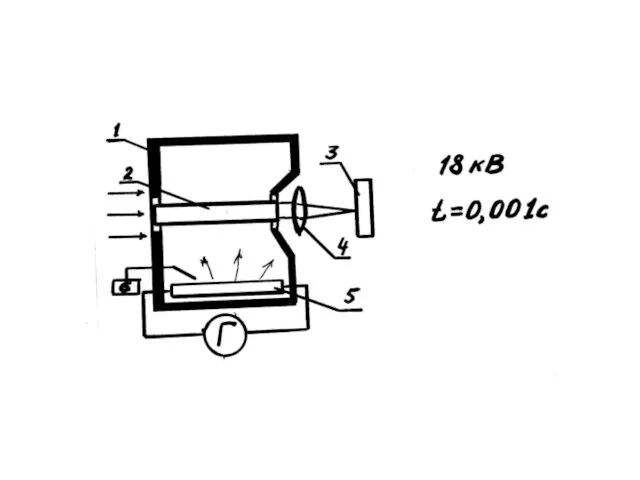
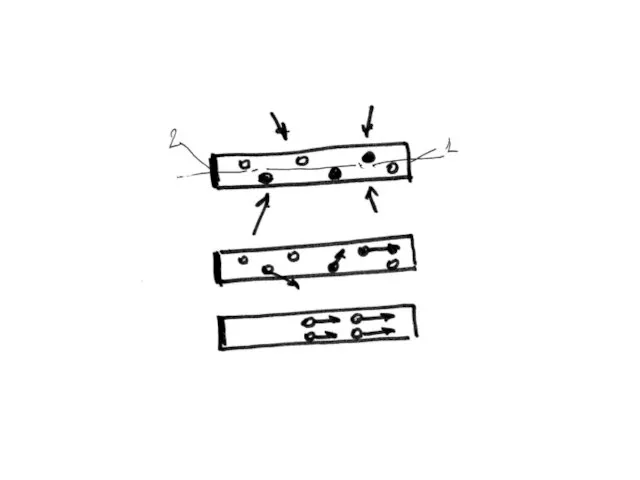
- 48. В соответствии с физическим принципом, положенным в основу преобразования информации, различают следующие основные типы чувствительных элементов:
- 51. , где ρ, l, S – удельное электросопротивление, длина и сечение проводника соответственно. Удельное сопротивление ρ
- 62. Выходным сигналом датчика является сила тока I в обмотке: I y = Uı / z, (12)
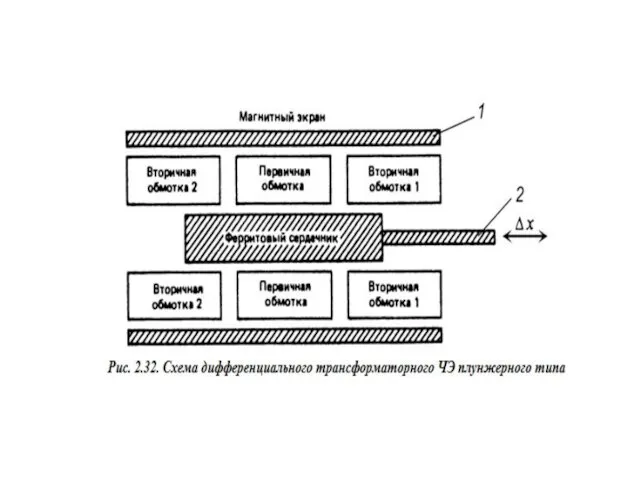
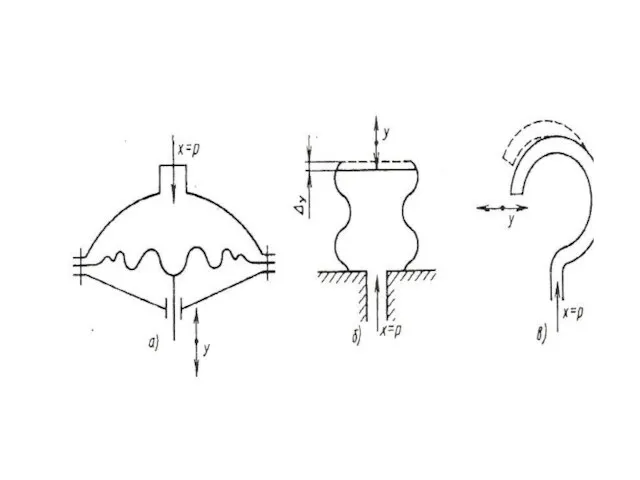
- 63. U1 * 105 I y=_______________x. (14) 4π²ƒw²S Статическая характеристика индуктивного датчика перемещения показана на рис. 4,6.
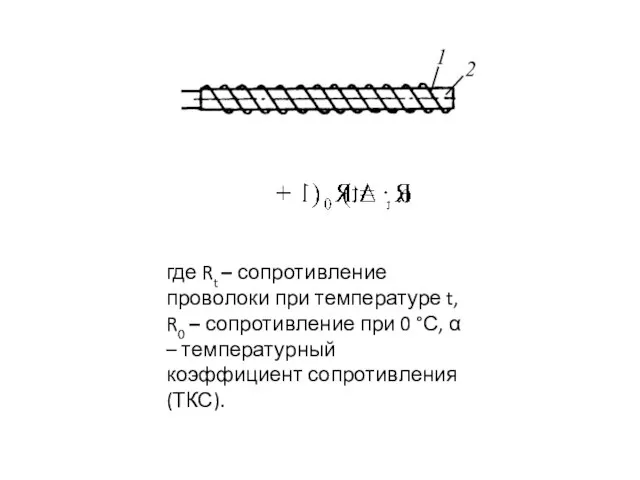
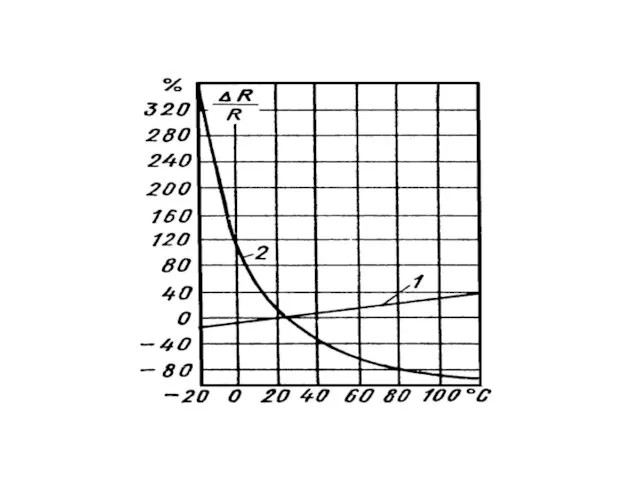
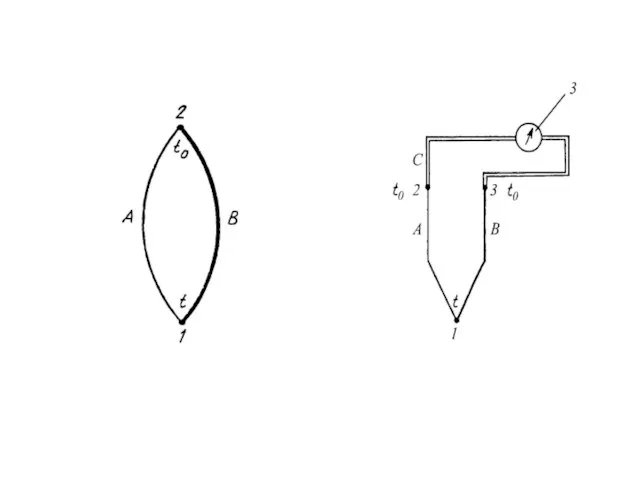
- 76. где Rt – сопротивление проволоки при температуре t, R0 – сопротивление при 0 °С, α –
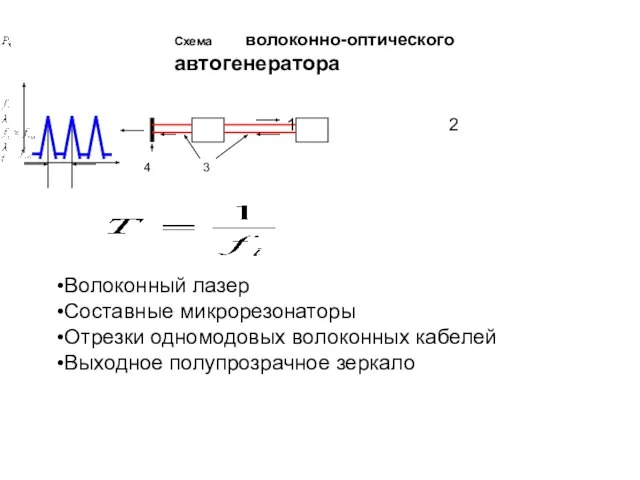
- 97. Схема волоконно-оптического автогенератора Выход 1 2 4 3 T Волоконный лазер Составные микрорезонаторы Отрезки одномодовых волоконных
- 99. Скачать презентацию
Слайд 2Литература
Э.И. Медякова Физические основы измерений. СЗПУ 2008г.
Гришин Рачков М.Ю. Физические основы
Литература
Э.И. Медякова Физические основы измерений. СЗПУ 2008г.
Гришин Рачков М.Ю. Физические основы
Слайд 3Технические измерения в машиностроении
Системы автоматического контроля
Основные термины пределения
Пассивные системы автоматического контроля
Технические измерения в машиностроении
Системы автоматического контроля
Основные термины пределения
Пассивные системы автоматического контроля
Слайд 4Измерение – нахождение значения физической величины опытным путем с помощью средств измерений.
Погрешность
Измерение – нахождение значения физической величины опытным путем с помощью средств измерений.
Погрешность
Слайд 5Измерительная система – совокупность СИ, соединенных между собой каналами вязи, предназначенная для
Измерительная система – совокупность СИ, соединенных между собой каналами вязи, предназначенная для
Слайд 6Пассивные системы автоматического контроля
Структурная схема пассивной САК
Пассивные системы автоматического контроля
Структурная схема пассивной САК

Слайд 7Структурная схема загрузочного устройства контрольно-сортировочного автомата
Структурная схема загрузочного устройства контрольно-сортировочного автомата
Слайд 8. Устройство загрузки
. Устройство загрузки
Слайд 9Схема устройства транспортировки с прямолинейным перемещением детали
Схема устройства транспортировки с прямолинейным перемещением детали
Слайд 10. Схема для комплексной двухпрофильной проверки зубчатых колес
. Схема для комплексной двухпрофильной проверки зубчатых колес
Слайд 11Схема устройства автоматического контроля и сортировки поршневых колец
Схема устройства автоматического контроля и сортировки поршневых колец
Слайд 13Схема вычислительного устройства на базе микроконтроллера
Схема вычислительного устройства на базе микроконтроллера
Слайд 14Циклограмма измерительной позиции устройства автоматического контроля
Циклограмма измерительной позиции устройства автоматического контроля

Слайд 15Время срабатывания измерительного устройства
Время срабатывания измерительного устройства
Слайд 16Технические измерения и приборы
Классификация измерений
Основные сведения об измерениях
Технические измерения и приборы
Классификация измерений
Основные сведения об измерениях
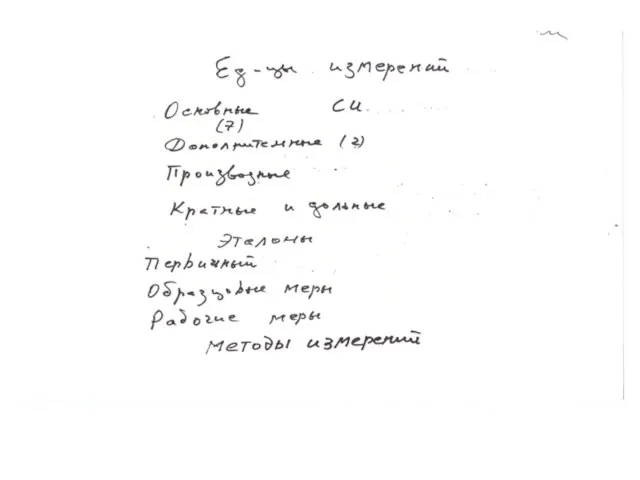
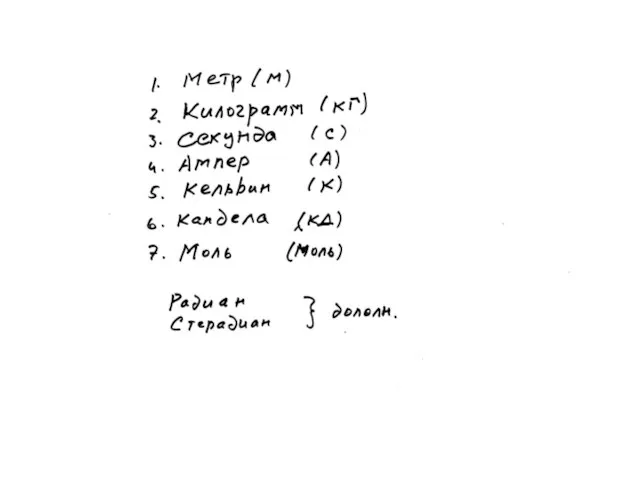
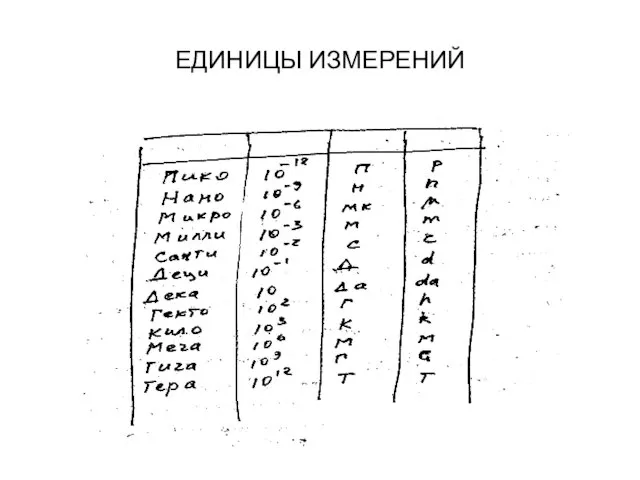
Слайд 19ЕДИНИЦЫ ИЗМЕРЕНИЙ
ЕДИНИЦЫ ИЗМЕРЕНИЙ
Слайд 22К совокупным относятся производимые одновременно измерения нескольких одноименных величин, при которых искомые
К совокупным относятся производимые одновременно измерения нескольких одноименных величин, при которых искомые
Слайд 23Совместные измерения – это производимые одновременно измерения двух или нескольких неодноименных величин
Совместные измерения – это производимые одновременно измерения двух или нескольких неодноименных величин
Слайд 24Решая эту систему относительно R0, α и β, получаем значения искомых величин.
Решая эту систему относительно R0, α и β, получаем значения искомых величин.

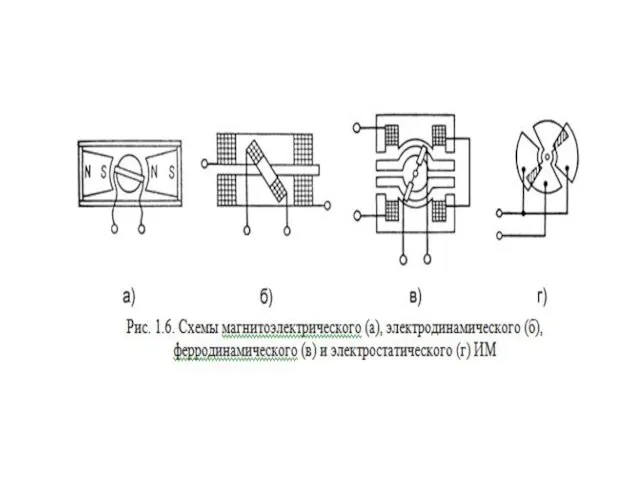
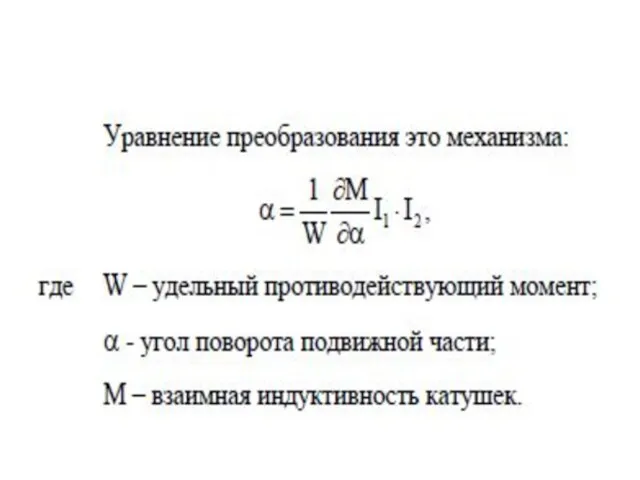
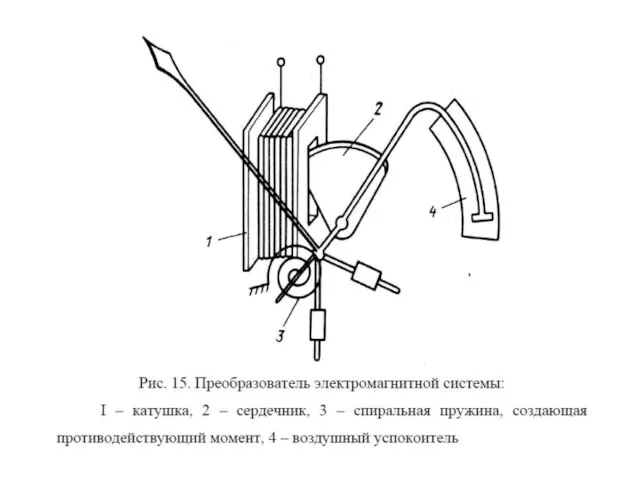
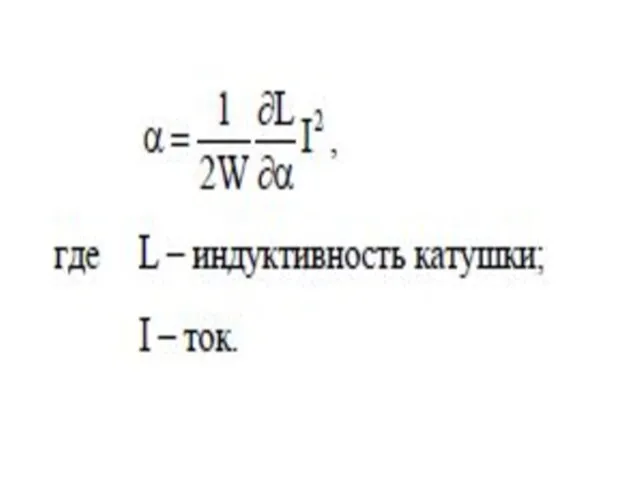
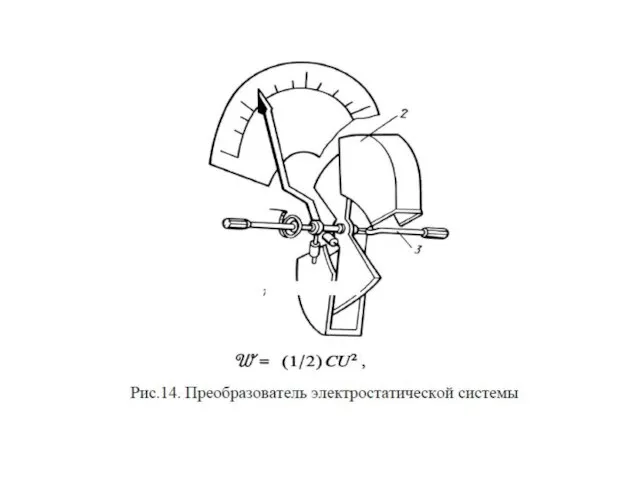


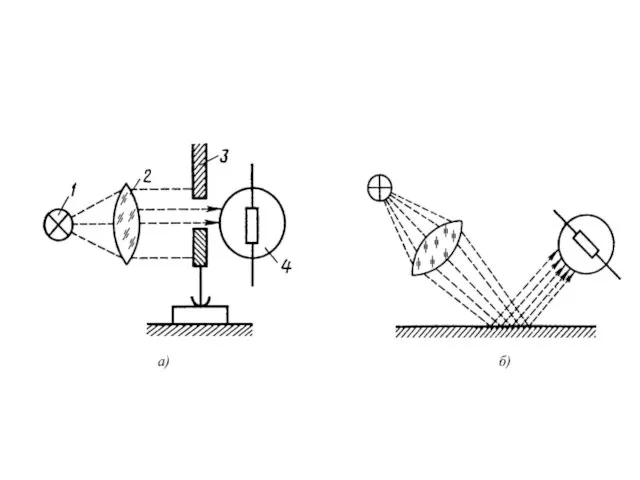
Слайд 48В соответствии с физическим принципом, положенным в основу преобразования информации, различают следующие
В соответствии с физическим принципом, положенным в основу преобразования информации, различают следующие
Слайд 51,
где ρ, l, S – удельное электросопротивление, длина и сечение проводника соответственно.
Удельное
,
где ρ, l, S – удельное электросопротивление, длина и сечение проводника соответственно.
Удельное


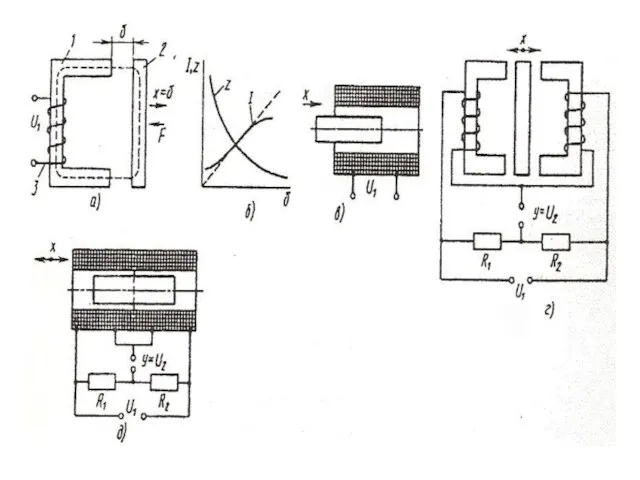
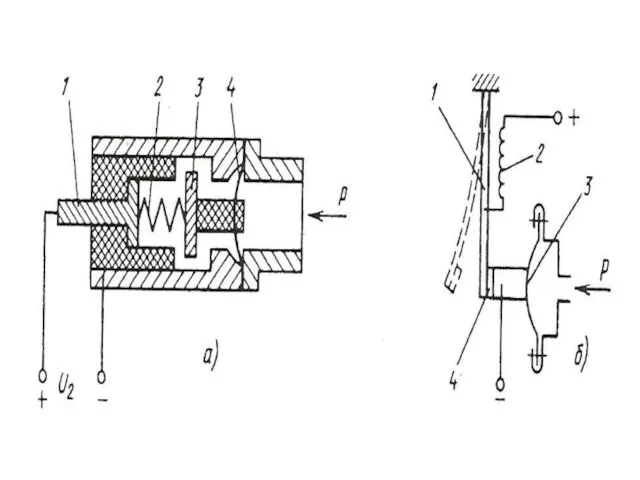
Слайд 62Выходным сигналом датчика является сила тока I в обмотке:
I y =
Выходным сигналом датчика является сила тока I в обмотке:
I y =
Слайд 63U1 * 105
I y=_______________x. (14)
4π²ƒw²S
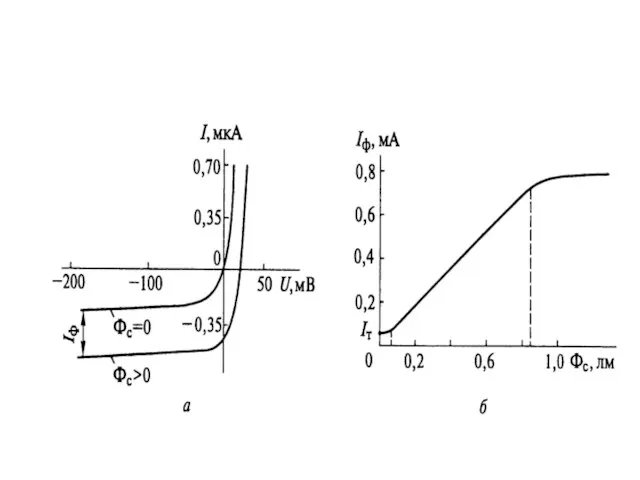
Статическая характеристика индуктивного датчика перемещения показана
U1 * 105
I y=_______________x. (14)
4π²ƒw²S
Статическая характеристика индуктивного датчика перемещения показана

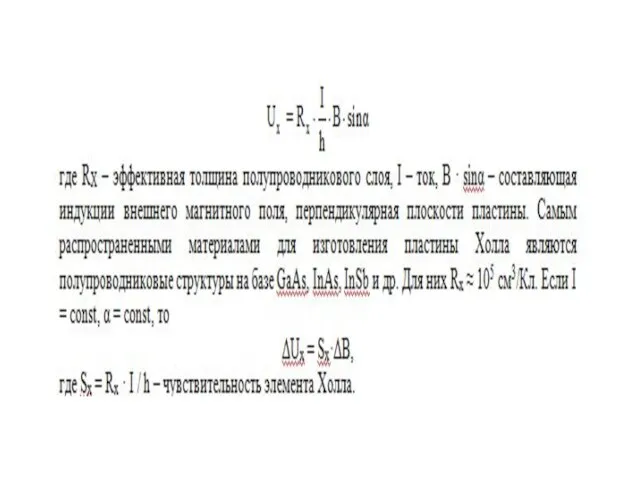
Слайд 76где Rt – сопротивление проволоки при температуре t, R0 – сопротивление при
где Rt – сопротивление проволоки при температуре t, R0 – сопротивление при
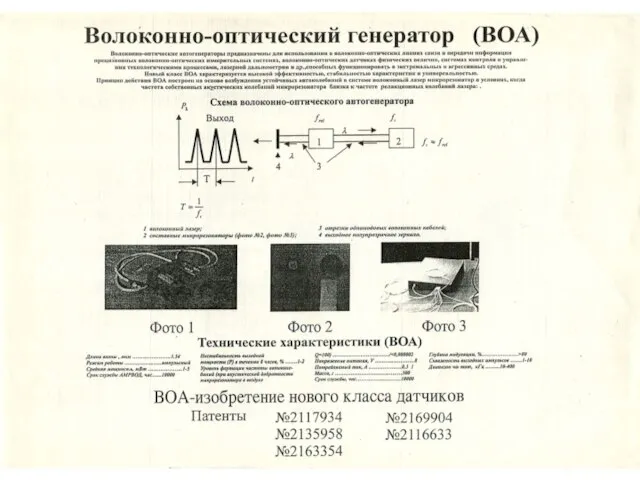

Слайд 97Схема волоконно-оптического автогенератора
Выход
1 2
Схема волоконно-оптического автогенератора
Выход
1 2
 М1У9 презентация
М1У9 презентация Переменные
Переменные Кодирование информации
Кодирование информации Автоматизация создания листа на акцию к моменту заказов под промо. X5 Retail Group
Автоматизация создания листа на акцию к моменту заказов под промо. X5 Retail Group Герои игр
Герои игр Как проверить, что оплата получена?
Как проверить, что оплата получена? Презентация на тему Защита от компьютерных вирусов
Презентация на тему Защита от компьютерных вирусов  Классификация баз данных
Классификация баз данных Умный дом
Умный дом Классический фотоальбом
Классический фотоальбом Homework assignment
Homework assignment Знаковые модели. Моделирование и формализация. 9 класс
Знаковые модели. Моделирование и формализация. 9 класс Бойцовский клуб. Цветовая композиция
Бойцовский клуб. Цветовая композиция Практика SPARK
Практика SPARK Функционал председателя регионального отделения РДШ
Функционал председателя регионального отделения РДШ Игры, основанные на реальных исторических событиях
Игры, основанные на реальных исторических событиях Деревья решений
Деревья решений Мобильное программирование (часть 2)
Мобильное программирование (часть 2) Презентация Бесконтактная оплата (1)
Презентация Бесконтактная оплата (1) Мовиус — это система автоматической продажи билетов в соответствии с ФЗ-54
Мовиус — это система автоматической продажи билетов в соответствии с ФЗ-54 Криптография
Криптография Структура базы данных
Структура базы данных Windows Boot Manager
Windows Boot Manager Моделирование и визуализация cлучайных данных
Моделирование и визуализация cлучайных данных Базы данных. § 12. Информационные системы
Базы данных. § 12. Информационные системы Программное и аппаратное обеспечение компьютера
Программное и аппаратное обеспечение компьютера Нить Ариадны для студента
Нить Ариадны для студента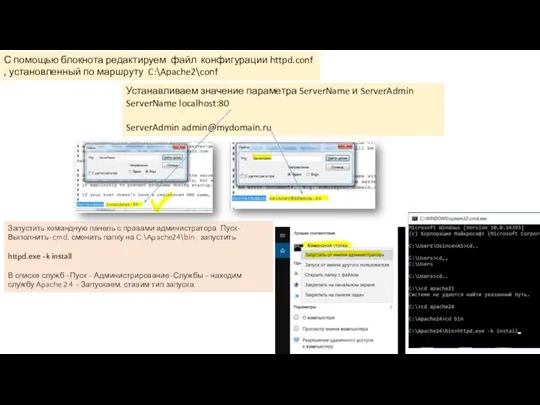 Редактируем файл
Редактируем файл