Типы планирования. Алгоритмы планирования. Примеры реализации алгоритмов планирования в современных операционных системах
- Типы планирования. Алгоритмы планирования. Примеры реализации алгоритмов планирования в современных операционных системах

Содержание
- 2. Планирование - обеспечение поочередного доступа процессов к одному процессору. Планировщик - отвечающая за это часть операционной
- 3. Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по аппаратному таймеру, процесс останавливается только когда
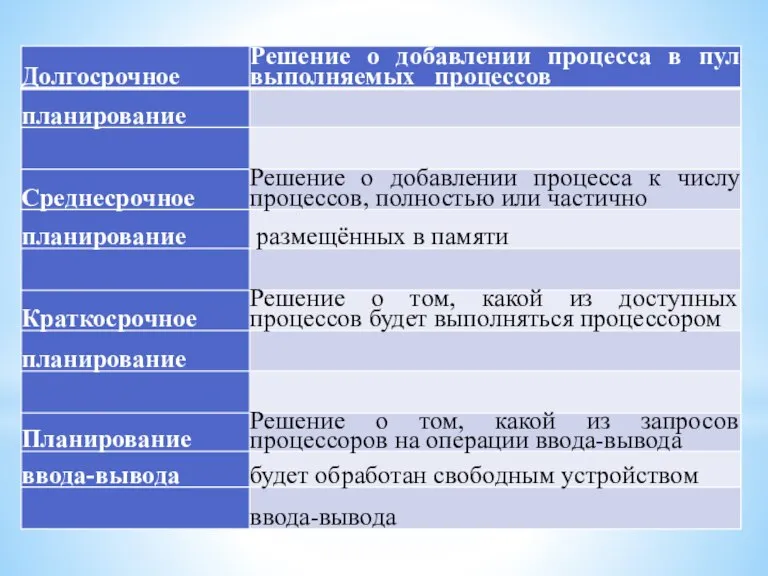
- 4. В многозадачных системах в основной памяти одновременно содержится код нескольких процессов. В работе каждого процесса периоды
- 6. Задачи алгоритмов планирования: Для всех систем Справедливость - каждому процессу справедливую долю процессорного времени Контроль над
- 7. Интерактивные системы Время отклика - быстрая реакция на запросы Соразмерность - выполнение ожиданий пользователя (например: пользователь
- 8. Планирование в системах пакетной обработки "Первый пришел - первым обслужен" (FIFO - First In Fist Out)
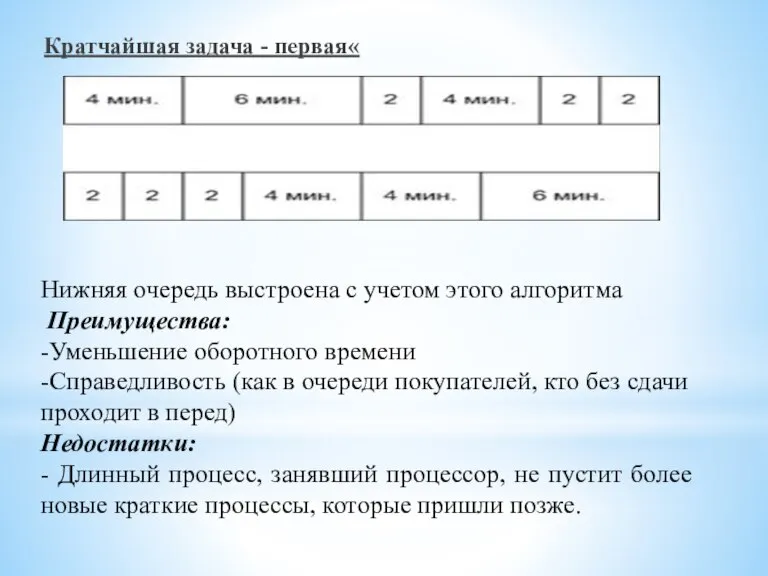
- 9. Кратчайшая задача - первая« Нижняя очередь выстроена с учетом этого алгоритма Преимущества: -Уменьшение оборотного времени -Справедливость
- 10. Наименьшее оставшееся время выполнения Аналог предыдущего, но если приходит новый процесс, его полное время выполнения сравнивается
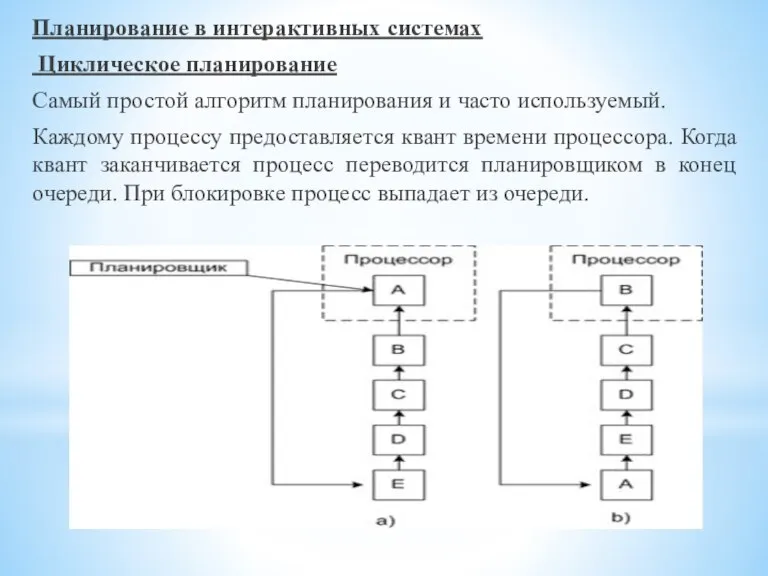
- 11. Планирование в интерактивных системах Циклическое планирование Самый простой алгоритм планирования и часто используемый. Каждому процессу предоставляется
- 12. Преимущества: Простата Справедливость (как в очереди покупателей, каждому только по килограмму) Недостатки: Если частые переключения (квант
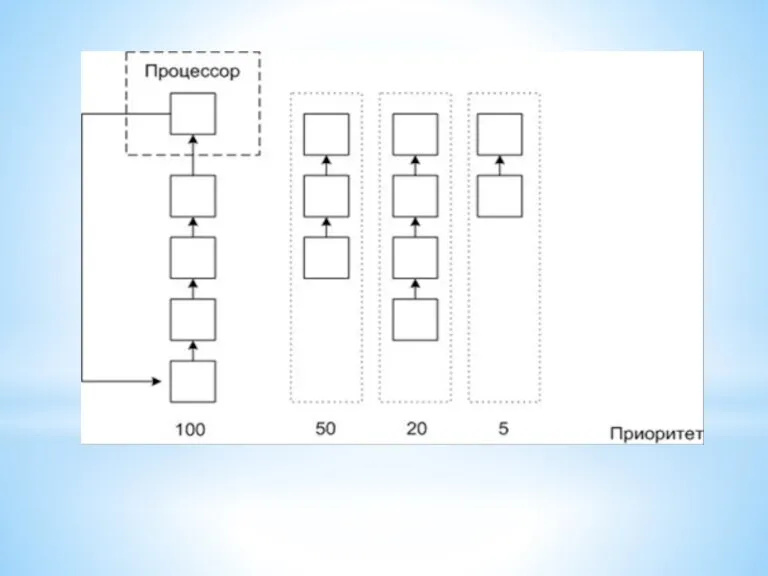
- 13. Приоритетное планирование Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким приоритетом. Приоритет может
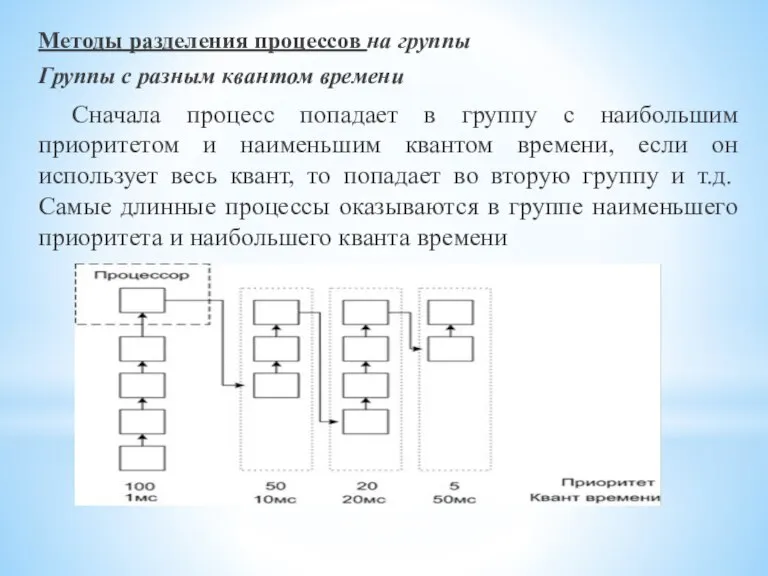
- 15. Методы разделения процессов на группы Группы с разным квантом времени Сначала процесс попадает в группу с
- 16. Планирование в системах реального времени Системы реального времени делятся на: - жесткие (жесткие сроки для каждой
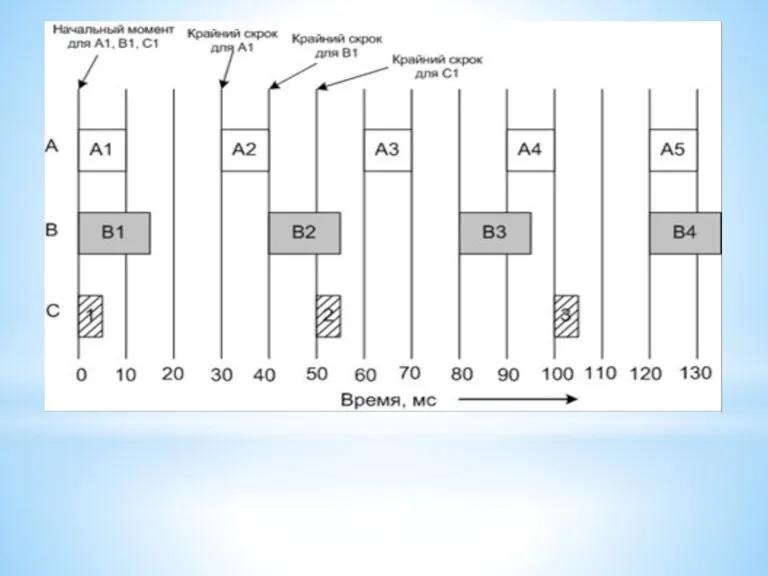
- 17. Общее планирование реального времени Используется модель, когда каждый процесс борется за процессор со своим заданием и
- 19. Статический алгоритм планирования RMS (Rate Monotonic Scheduling) Процессы должны удовлетворять условиям: - Процесс должен быть завершен
- 21. Динамический алгоритм планирования EDF (Earliest Deadline First) Наибольший приоритет выставляется процессу, у которого осталось наименьшее время
- 23. Скачать презентацию
Слайд 2Планирование - обеспечение поочередного доступа процессов к одному процессору.
Планировщик - отвечающая за
Планирование - обеспечение поочередного доступа процессов к одному процессору.
Планировщик - отвечающая за
Слайд 3 Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по аппаратному таймеру,
Алгоритм планирования без переключений (неприоритетный) - не требует прерывание по аппаратному таймеру,
Слайд 4 В многозадачных системах в основной памяти одновременно содержится код нескольких процессов. В
В многозадачных системах в основной памяти одновременно содержится код нескольких процессов. В
Слайд 6Задачи алгоритмов планирования:
Для всех систем
Справедливость - каждому процессу справедливую долю процессорного времени
Контроль
Задачи алгоритмов планирования:
Для всех систем
Справедливость - каждому процессу справедливую долю процессорного времени
Контроль
Слайд 7Интерактивные системы
Время отклика - быстрая реакция на запросы
Соразмерность - выполнение ожиданий пользователя
Интерактивные системы
Время отклика - быстрая реакция на запросы
Соразмерность - выполнение ожиданий пользователя
Слайд 8Планирование в системах пакетной обработки
"Первый пришел - первым обслужен" (FIFO -
Планирование в системах пакетной обработки
"Первый пришел - первым обслужен" (FIFO -
Слайд 9Кратчайшая задача - первая«
Нижняя очередь выстроена с учетом этого алгоритма
Преимущества:
-Уменьшение оборотного времени
-Справедливость
Кратчайшая задача - первая«
Нижняя очередь выстроена с учетом этого алгоритма
Преимущества:
-Уменьшение оборотного времени
-Справедливость
Слайд 10Наименьшее оставшееся время выполнения
Аналог предыдущего, но если приходит новый процесс, его полное
Наименьшее оставшееся время выполнения
Аналог предыдущего, но если приходит новый процесс, его полное

Слайд 11Планирование в интерактивных системах
Циклическое планирование
Самый простой алгоритм планирования и часто используемый.
Каждому
Планирование в интерактивных системах
Циклическое планирование
Самый простой алгоритм планирования и часто используемый.
Каждому
Слайд 12Преимущества:
Простата
Справедливость (как в очереди покупателей, каждому только по килограмму)
Недостатки:
Если частые переключения (квант
Преимущества:
Простата
Справедливость (как в очереди покупателей, каждому только по килограмму)
Недостатки:
Если частые переключения (квант
Слайд 13Приоритетное планирование
Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким
Приоритетное планирование
Каждому процессу присваивается приоритет, и управление передается процессу с самым высоким
Слайд 15Методы разделения процессов на группы
Группы с разным квантом времени
Сначала процесс попадает в
Методы разделения процессов на группы
Группы с разным квантом времени
Сначала процесс попадает в
Слайд 16Планирование в системах реального времени
Системы реального времени делятся на:
- жесткие (жесткие сроки
Планирование в системах реального времени
Системы реального времени делятся на:
- жесткие (жесткие сроки
Слайд 17Общее планирование реального времени
Используется модель, когда каждый процесс борется за процессор со
Общее планирование реального времени
Используется модель, когда каждый процесс борется за процессор со
Слайд 19Статический алгоритм планирования RMS (Rate Monotonic Scheduling)
Процессы должны удовлетворять условиям:
- Процесс должен
Статический алгоритм планирования RMS (Rate Monotonic Scheduling)
Процессы должны удовлетворять условиям:
- Процесс должен
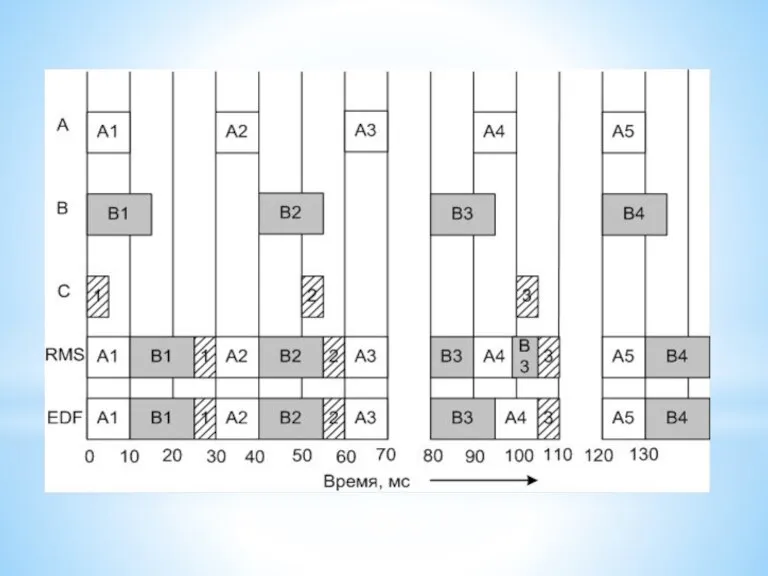
Слайд 21Динамический алгоритм планирования EDF (Earliest Deadline First)
Наибольший приоритет выставляется процессу, у которого
Динамический алгоритм планирования EDF (Earliest Deadline First)
Наибольший приоритет выставляется процессу, у которого
 Цветовая модель Lab
Цветовая модель Lab Роль информатики и информационных технологий в современном мире
Роль информатики и информационных технологий в современном мире Мобильное Электронное Образование в ДОУ – доступность качественного образования
Мобильное Электронное Образование в ДОУ – доступность качественного образования Программирование JavaScript на базе библиотеки JQuery
Программирование JavaScript на базе библиотеки JQuery Технические новинки первой мировой войны
Технические новинки первой мировой войны Информация бывает
Информация бывает Информатика и информация. (Тема 1)
Информатика и информация. (Тема 1) MagicDom. Game
MagicDom. Game Дельта-кодирование. Delta Encoding
Дельта-кодирование. Delta Encoding Программирование на языке Python. Циклические алгоритмы
Программирование на языке Python. Циклические алгоритмы Геометрическое моделирование и компьютерная графика
Геометрическое моделирование и компьютерная графика Средневековая криптография
Средневековая криптография Работа с файловыми архивами
Работа с файловыми архивами ST APP by ST company Счастливые студенты сегодня
ST APP by ST company Счастливые студенты сегодня Сетевые адаптеры
Сетевые адаптеры Выпускная квалификационная работа. Технологии набора и верстки журнального разворота с содержанием колонтитула
Выпускная квалификационная работа. Технологии набора и верстки журнального разворота с содержанием колонтитула Программное обеспечение компьютера
Программное обеспечение компьютера Структуры данных во вторичной памяти
Структуры данных во вторичной памяти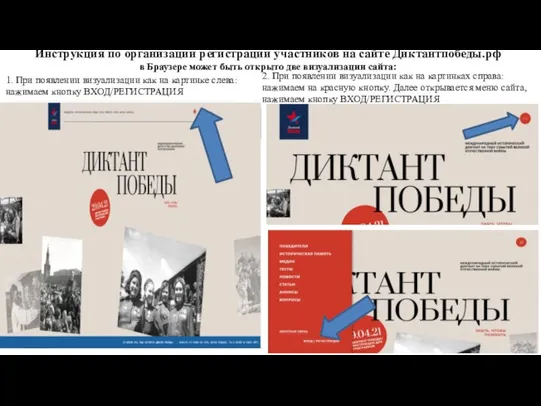 Инструкция по организации регистрации участников на сайте Диктантпобеды.рф
Инструкция по организации регистрации участников на сайте Диктантпобеды.рф Информационные системы
Информационные системы Работа с базой данных
Работа с базой данных История развития вычислительной техники (лекция 2)
История развития вычислительной техники (лекция 2) Системы искусственного интеллекта, классификация, особенности
Системы искусственного интеллекта, классификация, особенности Практичні рішення питань паркування в місті та організація роботи відділу паркування
Практичні рішення питань паркування в місті та організація роботи відділу паркування Электронный бюджет
Электронный бюджет Первый Бит международный интегратор эффективных ИТ-решений
Первый Бит международный интегратор эффективных ИТ-решений تقرير الفيسبوك
تقرير الفيسبوك Искусственный интеллект в управлении капиталом
Искусственный интеллект в управлении капиталом