- Выделение контуров. Контур vs. Граница

Содержание
- 2. Контур vs. Граница Контур — в общем случае, замкнутая линия, очертание некоторой геометрической фигуры, предмета; силуэт.
- 3. Назначение Предварительный этап для: Обнаружения объектов, Подсчета расстояний, поиска оптимального пути, Подсчета площади/объема Сегментации
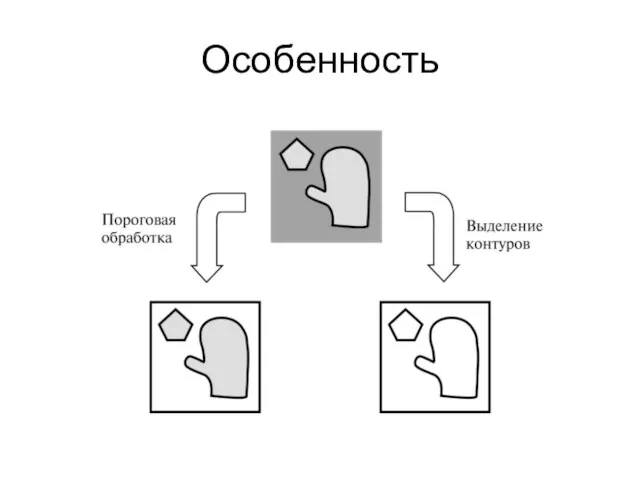
- 4. Особенность
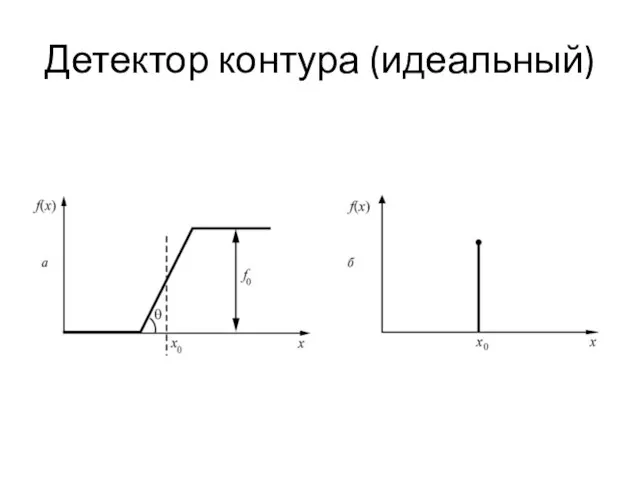
- 5. Детектор контура (идеальный)
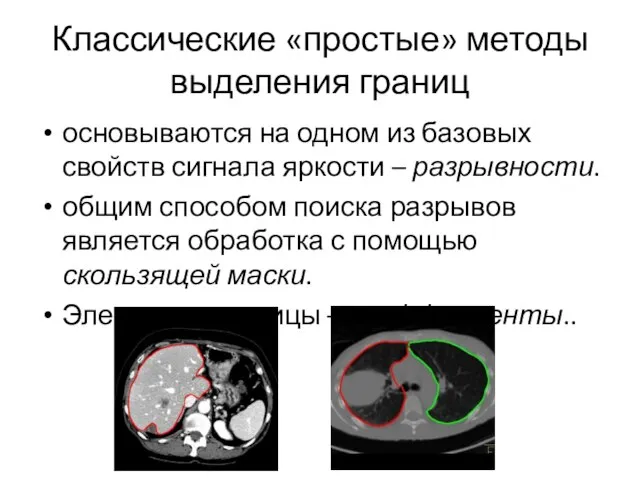
- 6. Классические «простые» методы выделения границ основываются на одном из базовых свойств сигнала яркости – разрывности. общим
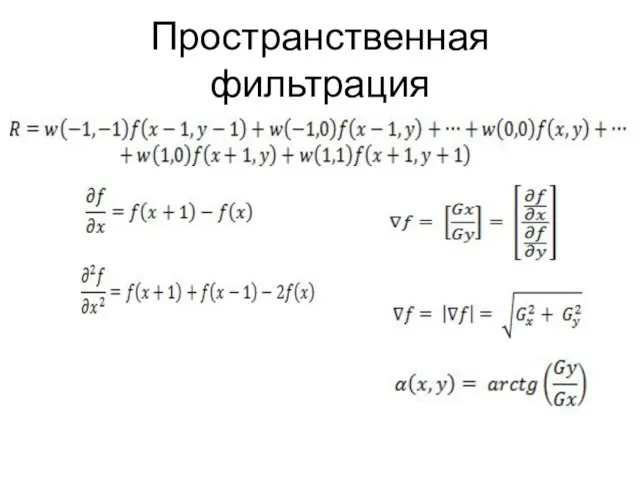
- 8. Пространственная фильтрация
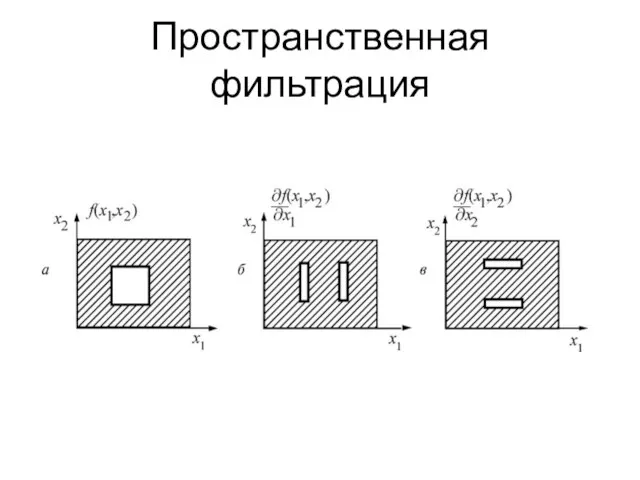
- 9. Пространственная фильтрация
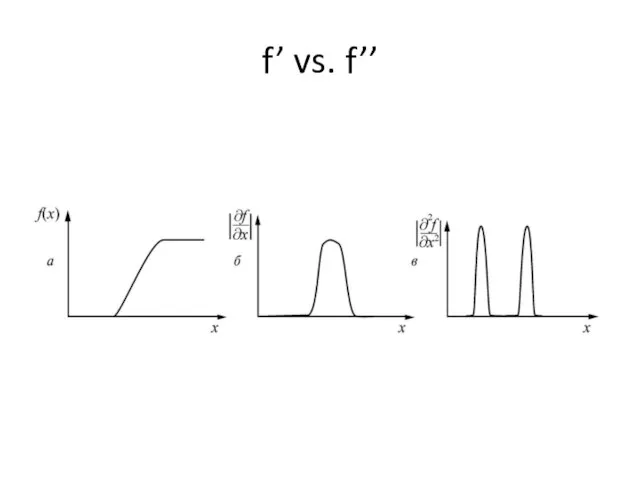
- 10. f’ vs. f’’
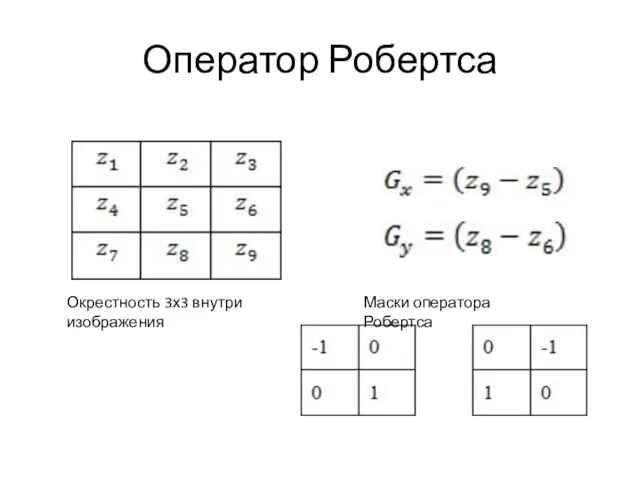
- 11. Оператор Робертса Окрестность 3х3 внутри изображения Маски оператора Робертса
- 12. Оператор Превитта
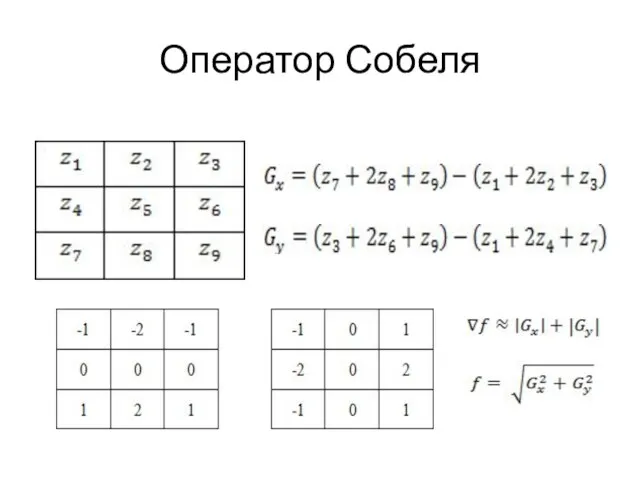
- 13. Оператор Собеля
- 14. Примеры http://matlabtricks.com/post-5/3x3-convolution-kernels-with-online-demo
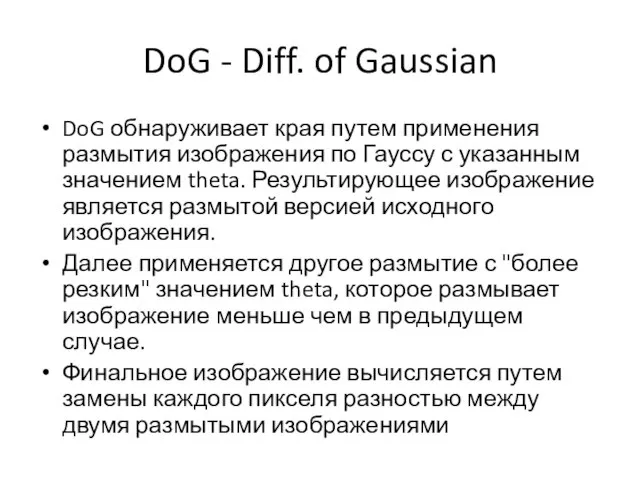
- 15. DoG - Diff. of Gaussian DoG обнаруживает края путем применения размытия изображения по Гауссу с указанным
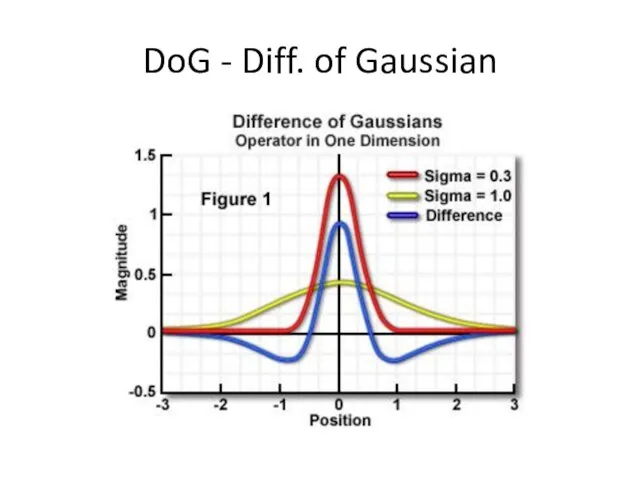
- 16. DoG - Diff. of Gaussian
- 17. DoG. An interactive tutorial http://micro.magnet.fsu.edu/primer/java/digitalimaging/processing/diffgaussians/index.html
- 18. Ожидание vs. Реальность
- 19. Алгоритм Canny Целью Кэнни было разработать оптимальный алгоритм обнаружения границ, удовлетворяющий трём критериям: хорошее обнаружение (Кэнни
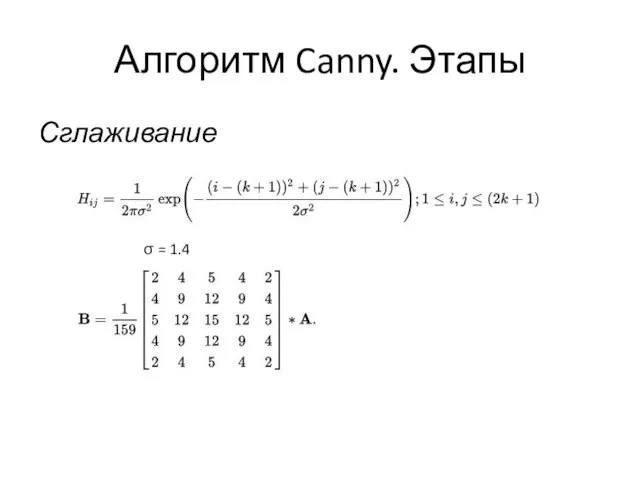
- 20. Алгоритм Canny. Этапы Сглаживание σ = 1.4
- 21. Алгоритм Canny. Этапы Поиск градиентов. Границы отмечаются там, где градиент изображения приобретает максимальное значение. Они могут
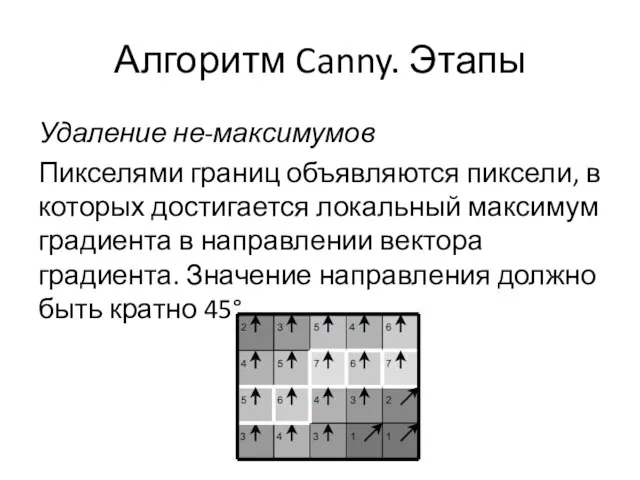
- 22. Алгоритм Canny. Этапы Удаление не-максимумов Пикселями границ объявляются пиксели, в которых достигается локальный максимум градиента в
- 23. Алгоритм Canny. Этапы Двойная пороговая фильтрация если значение пикселя выше верхней границы – он принимает максимальное
- 24. Алгоритм Canny. Этапы Трассировка области неоднозначности задача сводится к выделению групп пикселей, получивших на предыдущем этапе
- 25. Алгоритм Canny. Этапы Пример с Хабра https://habrahabr.ru/post/114589/
- 27. Скачать презентацию
Слайд 2Контур vs. Граница
Контур — в общем случае, замкнутая линия, очертание некоторой геометрической фигуры,
Контур vs. Граница
Контур — в общем случае, замкнутая линия, очертание некоторой геометрической фигуры,
Слайд 3Назначение
Предварительный этап для:
Обнаружения объектов,
Подсчета расстояний, поиска оптимального пути,
Подсчета площади/объема
Сегментации
Назначение
Предварительный этап для:
Обнаружения объектов,
Подсчета расстояний, поиска оптимального пути,
Подсчета площади/объема
Сегментации
Слайд 4Особенность
Особенность
Слайд 5Детектор контура (идеальный)
Детектор контура (идеальный)
Слайд 6Классические «простые» методы выделения границ
основываются на одном из базовых свойств сигнала яркости
Классические «простые» методы выделения границ
основываются на одном из базовых свойств сигнала яркости
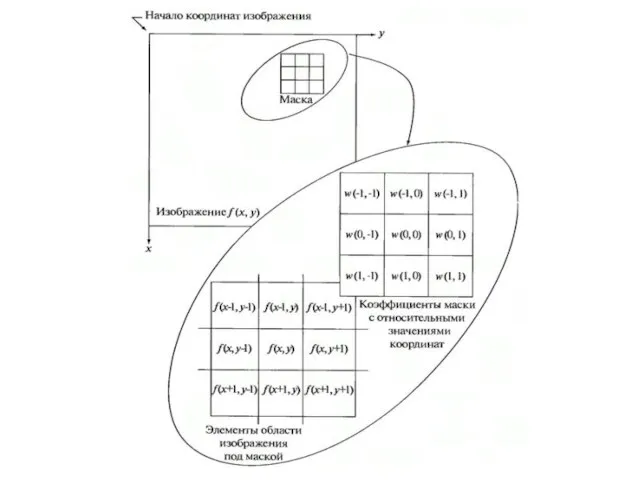
Слайд 8Пространственная фильтрация
Пространственная фильтрация
Слайд 9Пространственная фильтрация
Пространственная фильтрация
Слайд 10f’ vs. f’’
f’ vs. f’’
Слайд 11Оператор Робертса
Окрестность 3х3 внутри изображения
Маски оператора Робертса
Оператор Робертса
Окрестность 3х3 внутри изображения
Маски оператора Робертса
Слайд 12Оператор Превитта
Оператор Превитта

Слайд 13Оператор Собеля
Оператор Собеля
Слайд 14Примеры
http://matlabtricks.com/post-5/3x3-convolution-kernels-with-online-demo
Примеры
http://matlabtricks.com/post-5/3x3-convolution-kernels-with-online-demo
Слайд 15DoG - Diff. of Gaussian
DoG обнаруживает края путем применения размытия изображения по
DoG - Diff. of Gaussian
DoG обнаруживает края путем применения размытия изображения по
Слайд 16DoG - Diff. of Gaussian
DoG - Diff. of Gaussian
Слайд 17DoG. An interactive tutorial
http://micro.magnet.fsu.edu/primer/java/digitalimaging/processing/diffgaussians/index.html
DoG. An interactive tutorial
http://micro.magnet.fsu.edu/primer/java/digitalimaging/processing/diffgaussians/index.html
Слайд 18Ожидание vs. Реальность
Ожидание vs. Реальность

Слайд 19Алгоритм Canny
Целью Кэнни было разработать оптимальный алгоритм обнаружения границ, удовлетворяющий трём критериям:
хорошее
Алгоритм Canny
Целью Кэнни было разработать оптимальный алгоритм обнаружения границ, удовлетворяющий трём критериям:
хорошее
Слайд 20Алгоритм Canny. Этапы
Сглаживание
σ = 1.4
Алгоритм Canny. Этапы
Сглаживание
σ = 1.4
Слайд 21Алгоритм Canny. Этапы
Поиск градиентов.
Границы отмечаются там, где градиент изображения приобретает максимальное
Алгоритм Canny. Этапы
Поиск градиентов.
Границы отмечаются там, где градиент изображения приобретает максимальное
Слайд 22Алгоритм Canny. Этапы
Удаление не-максимумов
Пикселями границ объявляются пиксели, в которых достигается локальный максимум
Алгоритм Canny. Этапы
Удаление не-максимумов
Пикселями границ объявляются пиксели, в которых достигается локальный максимум
Слайд 23Алгоритм Canny. Этапы
Двойная пороговая фильтрация
если значение пикселя выше верхней границы – он
Алгоритм Canny. Этапы
Двойная пороговая фильтрация
если значение пикселя выше верхней границы – он
Слайд 24Алгоритм Canny. Этапы
Трассировка области неоднозначности
задача сводится к выделению групп пикселей, получивших на
Алгоритм Canny. Этапы
Трассировка области неоднозначности
задача сводится к выделению групп пикселей, получивших на
Слайд 25Алгоритм Canny. Этапы
Пример с Хабра
https://habrahabr.ru/post/114589/
Алгоритм Canny. Этапы
Пример с Хабра
https://habrahabr.ru/post/114589/
 Презентация на тему Интернет: да или нет
Презентация на тему Интернет: да или нет  Современные тенденции развития интернет-технологий
Современные тенденции развития интернет-технологий Безопасность транспортного уровня
Безопасность транспортного уровня Блочные алгоритмы симметричного шифрования
Блочные алгоритмы симметричного шифрования Шаблон для презентации
Шаблон для презентации Табличные информационные модели
Табличные информационные модели Компьютерные сети. Интернет
Компьютерные сети. Интернет Дистанционная подготовка
Дистанционная подготовка Методы моделирования развития социально-экономических систем в условиях неопределенности. Раздел 4
Методы моделирования развития социально-экономических систем в условиях неопределенности. Раздел 4 Защита информации
Защита информации Передача телемеханической информации
Передача телемеханической информации За и против социальных сетей
За и против социальных сетей Системные объекты. Системотехника
Системные объекты. Системотехника Шаблон презентации
Шаблон презентации Средства обеспечения безопасности информации
Средства обеспечения безопасности информации Информатика. Компьютер
Информатика. Компьютер Объекты(продолжение). Массивы. Деструктуризация
Объекты(продолжение). Массивы. Деструктуризация Создание 3D модели на основе операций твердотельного моделирования.(1 занятие)
Создание 3D модели на основе операций твердотельного моделирования.(1 занятие) Принципы работы в Access
Принципы работы в Access Sintez. Education center
Sintez. Education center Базы данных и система управления базами данных (СУБД)
Базы данных и система управления базами данных (СУБД) Презентация на тему Решение логических задач с помощью таблиц (6 класс)
Презентация на тему Решение логических задач с помощью таблиц (6 класс)  Вопрос как способ получения информации. Виды вопросов с примерами
Вопрос как способ получения информации. Виды вопросов с примерами Программирование на языке Python
Программирование на языке Python Решение задач на компьютере алгоритмизация и программирование
Решение задач на компьютере алгоритмизация и программирование Голосовой помощник
Голосовой помощник Виртуальная лаборатория. Метрики
Виртуальная лаборатория. Метрики Лекция 2. История развития вычислительной техники
Лекция 2. История развития вычислительной техники