- Виды медицинских публикаций 25.07

Содержание
- 2. Зачем публиковаться? Какие бывают статьи? Как написать статью?
- 3. ↑Научную грамотность, развивает логическое и критическое мышление 2.Участие в научных дискуссиях/ конференциях 3.Стажировка /работа 4.Материальное поощрение
- 4. План 1. Введение: виды научных публикаций 2. Тезис 3. Оригинальная статья 4.Описание клинического случая 5. Обзор:
- 5. 1. Научно-теоретическая (Обзор литературы, систематический обзор и т.д.) 2. Научно-практическая (Научный эксперимент и реальный опыт) 3.
- 6. Тезис в науке - кратко сформулированные основные положения оригинальной статьи (оригинального научного исследования) Обязательные разделы оригинальной
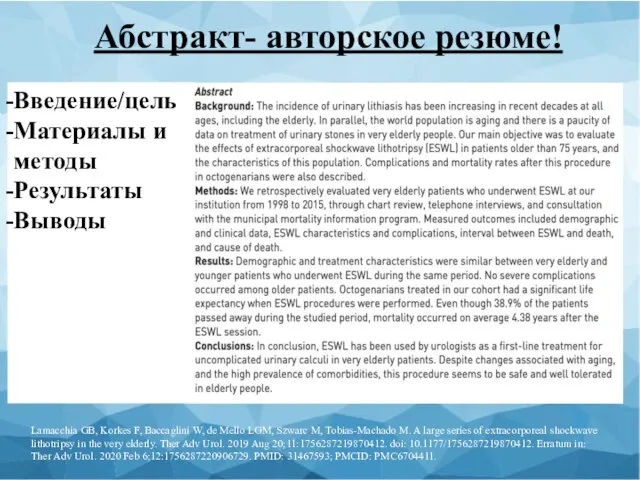
- 7. Введение/цель Материалы и методы Результаты Выводы Абстракт- авторское резюме! Lamacchia GB, Korkes F, Baccaglini W, de
- 8. Введение/цель Материалы и методы Результаты Выводы Абстракт- авторское резюме! Lamacchia GB, Korkes F, Baccaglini W, de
- 9. Введение/цель Материалы и методы Результаты Выводы Абстракт- авторское резюме! Lamacchia GB, Korkes F, Baccaglini W, de
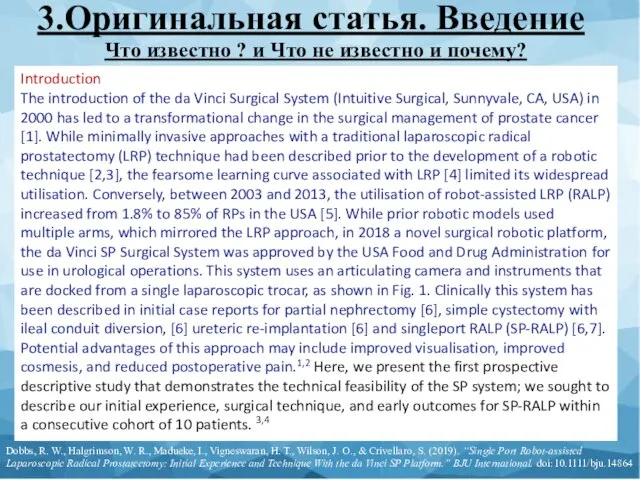
- 10. 3.Оригинальная статья. Введение Introduction The introduction of the da Vinci Surgical System (Intuitive Surgical, Sunnyvale, CA,
- 11. Материалы и методы He, H.-G., Han, C., & Zhang, W. (2015). A Mouse Model of Hypospadias
- 12. Материалы и методы. Дизайн
- 13. Результаты Results A total of 62 patients were identified for inclusion in the study with median
- 14. Обсуждение Модификации Плюсы/недостатки метода Сторонние исследования Плюсы/ недостатки дизайна Этические аспекты Прогнозируемые и фактические исходы
- 15. Выводы Дополнительные разделы: Benelli, A., Mariani, S., Varca, V., Gregori, A., Barrese, F., & Cappa, M.
- 16. Список литературы: Мартов А. Г., Ергаков Д. В., Гусейнов М. А., Андронов А. С., Дутов С.
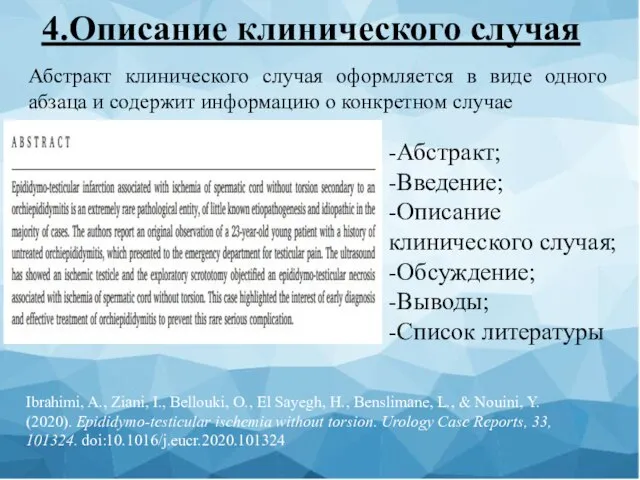
- 17. 4.Описание клинического случая Абстракт клинического случая оформляется в виде одного абзаца и содержит информацию о конкретном
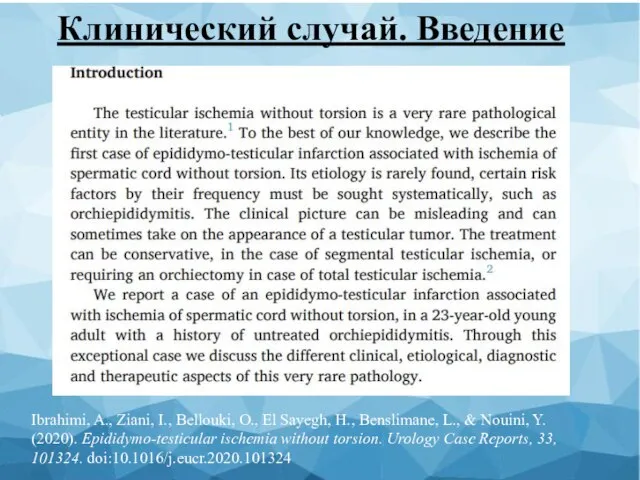
- 18. Клинический случай. Введение Ibrahimi, A., Ziani, I., Bellouki, O., El Sayegh, H., Benslimane, L., & Nouini,
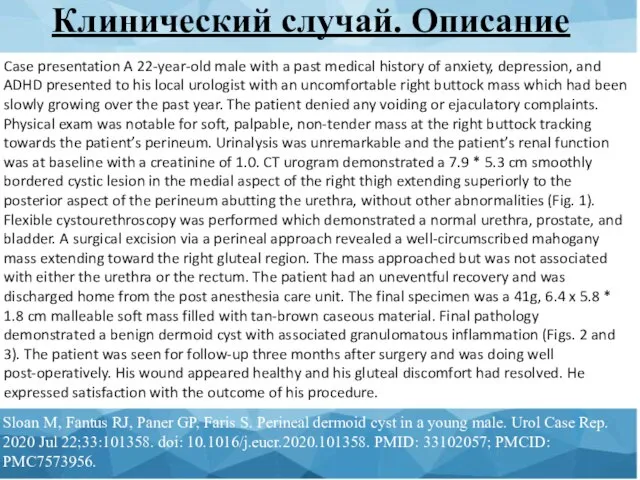
- 19. Клинический случай. Описание Case presentation A 22-year-old male with a past medical history of anxiety, depression,
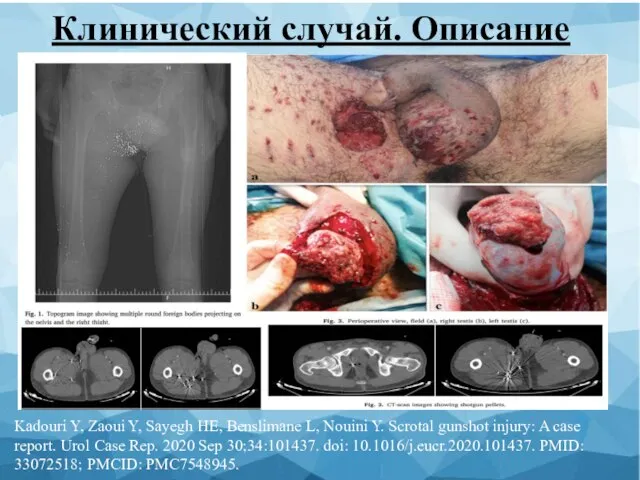
- 20. Клинический случай. Описание Kadouri Y, Zaoui Y, Sayegh HE, Benslimane L, Nouini Y. Scrotal gunshot injury:
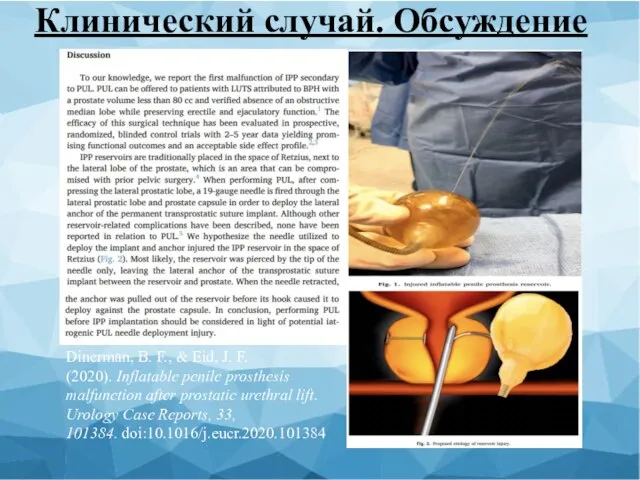
- 21. Клинический случай. Обсуждение Dinerman, B. F., & Eid, J. F. (2020). Inflatable penile prosthesis malfunction after
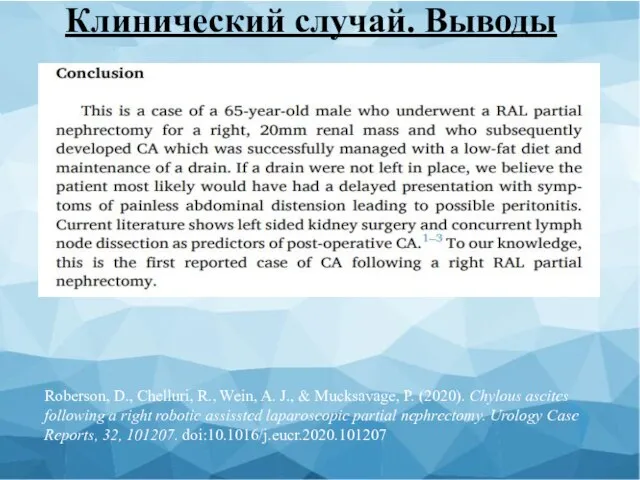
- 22. Клинический случай. Выводы Roberson, D., Chelluri, R., Wein, A. J., & Mucksavage, P. (2020). Chylous ascites
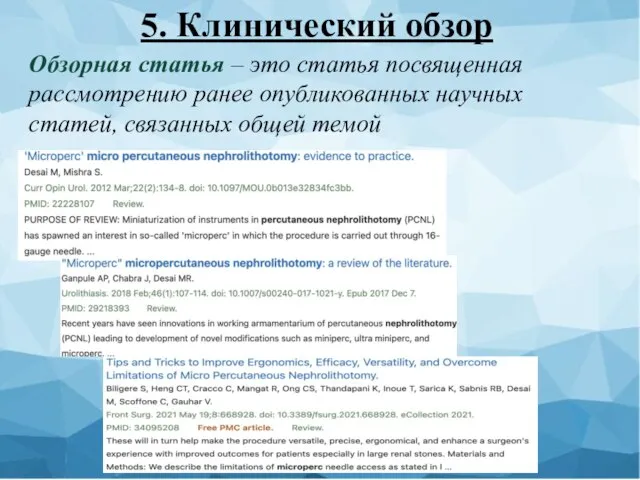
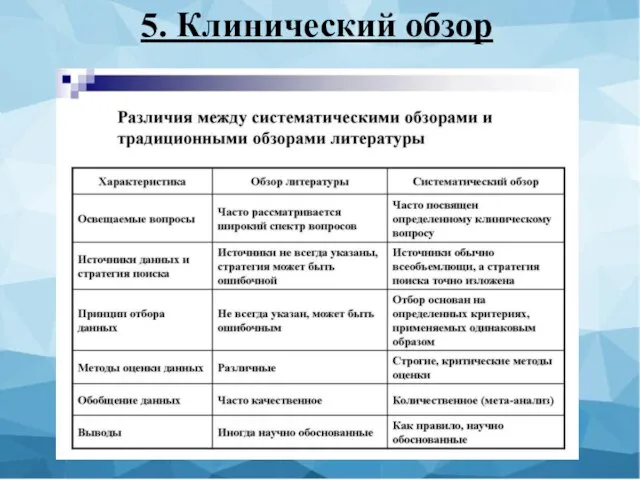
- 23. Обзорная статья – это статья посвященная рассмотрению ранее опубликованных научных статей, связанных общей темой 5. Клинический
- 24. 5. Клинический обзор
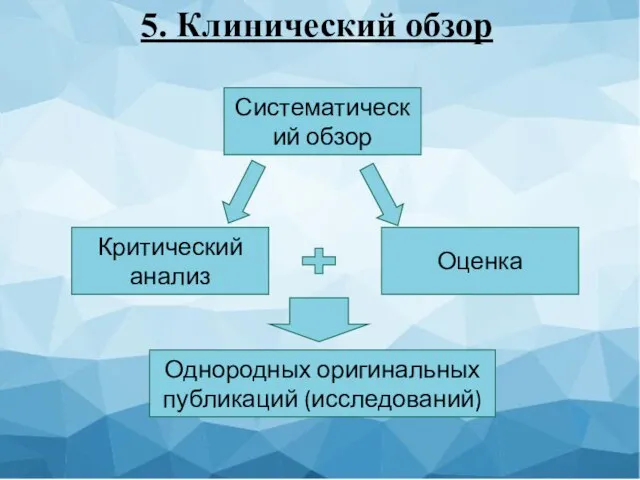
- 25. 5. Клинический обзор Систематический обзор Критический анализ Оценка Однородных оригинальных публикаций (исследований)
- 26. 5. Клинический обзор
- 27. 5. Клинический обзор
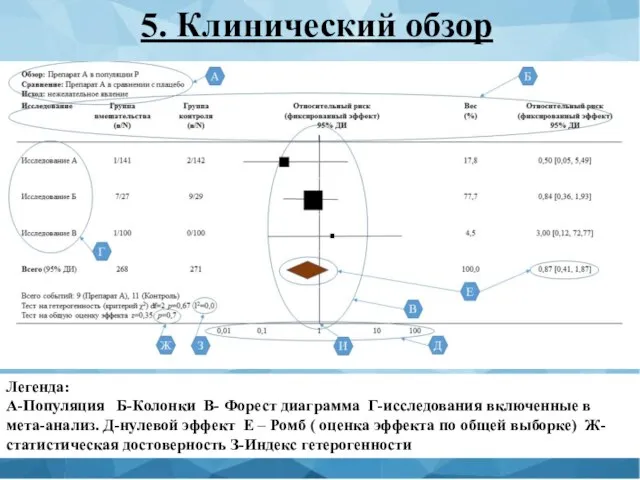
- 28. 5. Клинический обзор Легенда: А-Популяция Б-Колонки В- Форест диаграмма Г-исследования включенные в мета-анализ. Д-нулевой эффект Е
- 29. 5. Клинический обзор
- 30. ENDOUROCENTER Наука есть ясное познание истины, просвещение разума, непорочное увеселение жизни, похвала юности, старости подпора, строительница
- 32. Скачать презентацию
Слайд 3↑Научную грамотность, развивает логическое и критическое мышление
2.Участие в научных дискуссиях/ конференциях
3.Стажировка /работа
↑Научную грамотность, развивает логическое и критическое мышление
2.Участие в научных дискуссиях/ конференциях
3.Стажировка /работа
Слайд 4План
1. Введение: виды научных публикаций
2. Тезис
3. Оригинальная статья
4.Описание клинического случая
5. Обзор: повествовательный
План
1. Введение: виды научных публикаций
2. Тезис
3. Оригинальная статья
4.Описание клинического случая
5. Обзор: повествовательный
Слайд 51. Научно-теоретическая
(Обзор литературы, систематический обзор и т.д.)
2. Научно-практическая
(Научный эксперимент и реальный опыт)
3. Научно-методическая
(Описание
1. Научно-теоретическая
(Обзор литературы, систематический обзор и т.д.)
2. Научно-практическая
(Научный эксперимент и реальный опыт)
3. Научно-методическая
(Описание
Слайд 6Тезис в науке - кратко сформулированные основные положения оригинальной статьи (оригинального научного
Тезис в науке - кратко сформулированные основные положения оригинальной статьи (оригинального научного
Слайд 7Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello
Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello

Слайд 8Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello
Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello
Слайд 9Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello
Введение/цель
Материалы и методы
Результаты
Выводы
Абстракт- авторское резюме!
Lamacchia GB, Korkes F, Baccaglini W, de Mello
Слайд 103.Оригинальная статья. Введение
Introduction
The introduction of the da Vinci Surgical System (Intuitive
3.Оригинальная статья. Введение
Introduction
The introduction of the da Vinci Surgical System (Intuitive
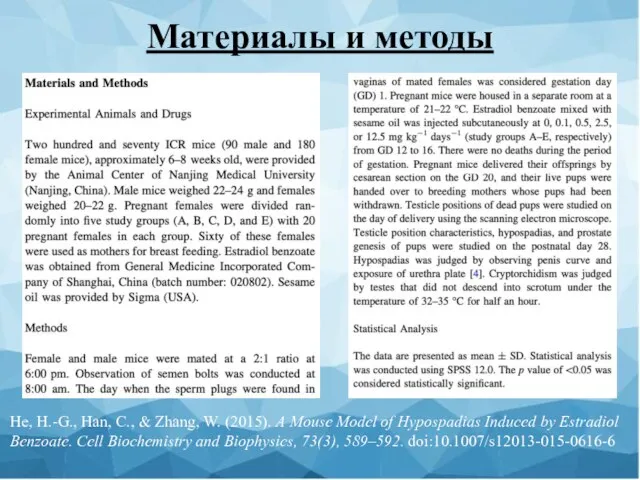
Слайд 11Материалы и методы
He, H.-G., Han, C., & Zhang, W. (2015). A Mouse Model
Материалы и методы
He, H.-G., Han, C., & Zhang, W. (2015). A Mouse Model
Слайд 12Материалы и методы. Дизайн
Материалы и методы. Дизайн

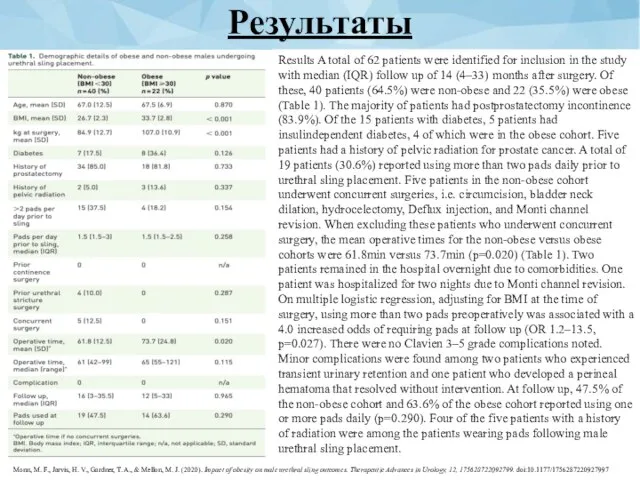
Слайд 13Результаты
Results A total of 62 patients were identified for inclusion in the
Результаты
Results A total of 62 patients were identified for inclusion in the
Слайд 14Обсуждение
Модификации
Плюсы/недостатки метода
Сторонние исследования
Плюсы/ недостатки дизайна
Этические аспекты
Прогнозируемые и фактические исходы
Обсуждение
Модификации
Плюсы/недостатки метода
Сторонние исследования
Плюсы/ недостатки дизайна
Этические аспекты
Прогнозируемые и фактические исходы
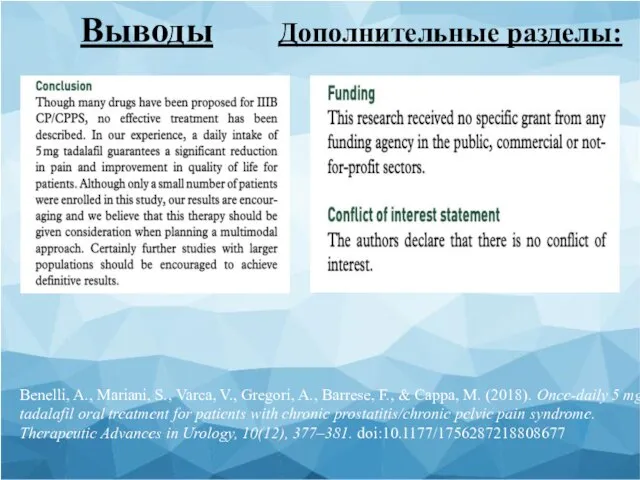
Слайд 15Выводы
Дополнительные разделы:
Benelli, A., Mariani, S., Varca, V., Gregori, A., Barrese, F., &
Выводы
Дополнительные разделы:
Benelli, A., Mariani, S., Varca, V., Gregori, A., Barrese, F., &
Слайд 16Список литературы:
Мартов А. Г., Ергаков Д. В., Гусейнов М. А., Андронов А.
Список литературы:
Мартов А. Г., Ергаков Д. В., Гусейнов М. А., Андронов А.
Слайд 174.Описание клинического случая
Абстракт клинического случая оформляется в виде одного абзаца и содержит
4.Описание клинического случая
Абстракт клинического случая оформляется в виде одного абзаца и содержит
Слайд 18Клинический случай. Введение
Ibrahimi, A., Ziani, I., Bellouki, O., El Sayegh, H., Benslimane,
Клинический случай. Введение
Ibrahimi, A., Ziani, I., Bellouki, O., El Sayegh, H., Benslimane,
Слайд 19Клинический случай. Описание
Case presentation A 22-year-old male with a past medical history
Клинический случай. Описание
Case presentation A 22-year-old male with a past medical history
Слайд 20Клинический случай. Описание
Kadouri Y, Zaoui Y, Sayegh HE, Benslimane L, Nouini Y.
Клинический случай. Описание
Kadouri Y, Zaoui Y, Sayegh HE, Benslimane L, Nouini Y.
Слайд 21Клинический случай. Обсуждение
Dinerman, B. F., & Eid, J. F. (2020). Inflatable penile prosthesis
Клинический случай. Обсуждение
Dinerman, B. F., & Eid, J. F. (2020). Inflatable penile prosthesis
Слайд 22Клинический случай. Выводы
Roberson, D., Chelluri, R., Wein, A. J., & Mucksavage, P.
Клинический случай. Выводы
Roberson, D., Chelluri, R., Wein, A. J., & Mucksavage, P.
Слайд 23Обзорная статья – это статья посвященная рассмотрению ранее опубликованных научных статей, связанных
Обзорная статья – это статья посвященная рассмотрению ранее опубликованных научных статей, связанных
Слайд 245. Клинический обзор
5. Клинический обзор
Слайд 255. Клинический обзор
Систематический обзор
Критический анализ
Оценка
Однородных оригинальных публикаций (исследований)
5. Клинический обзор
Систематический обзор
Критический анализ
Оценка
Однородных оригинальных публикаций (исследований)
Слайд 265. Клинический обзор
5. Клинический обзор
Слайд 275. Клинический обзор
5. Клинический обзор
Слайд 285. Клинический обзор
Легенда:
А-Популяция Б-Колонки В- Форест диаграмма Г-исследования включенные в мета-анализ.
5. Клинический обзор
Легенда:
А-Популяция Б-Колонки В- Форест диаграмма Г-исследования включенные в мета-анализ.
Слайд 295. Клинический обзор
5. Клинический обзор

Слайд 30ENDOUROCENTER
Наука есть ясное познание истины, просвещение разума, непорочное увеселение жизни, похвала юности,
ENDOUROCENTER
Наука есть ясное познание истины, просвещение разума, непорочное увеселение жизни, похвала юности,
 Железодефицитная анемия
Железодефицитная анемия Ағзаға инсулин еңгізгенде қандай процесс байқалады: гипергликемия, гликогенолиз, гликогеннің глюкозаға ауысуы
Ағзаға инсулин еңгізгенде қандай процесс байқалады: гипергликемия, гликогенолиз, гликогеннің глюкозаға ауысуы Вирус папилломы человека
Вирус папилломы человека Отряд первой медицинской помощи, его предназначение, оснащение, организация работы
Отряд первой медицинской помощи, его предназначение, оснащение, организация работы Гомеостаз. Состав, свойства и функции крови. Группы крови, резус-фактор
Гомеостаз. Состав, свойства и функции крови. Группы крови, резус-фактор Анатомо-физиологические особенности кожи. Клинико-морфологическая характеристика. Патогистология
Анатомо-физиологические особенности кожи. Клинико-морфологическая характеристика. Патогистология Атопиялық дерматит
Атопиялық дерматит Колоректальный рак. Геморрой
Колоректальный рак. Геморрой Пищевые отравления
Пищевые отравления Сестринское обследование - первый этап сестринского процесса
Сестринское обследование - первый этап сестринского процесса Гепатит
Гепатит Лабораторная медицина. Анализ кала на наличие яиц или частей тела гельминтов
Лабораторная медицина. Анализ кала на наличие яиц или частей тела гельминтов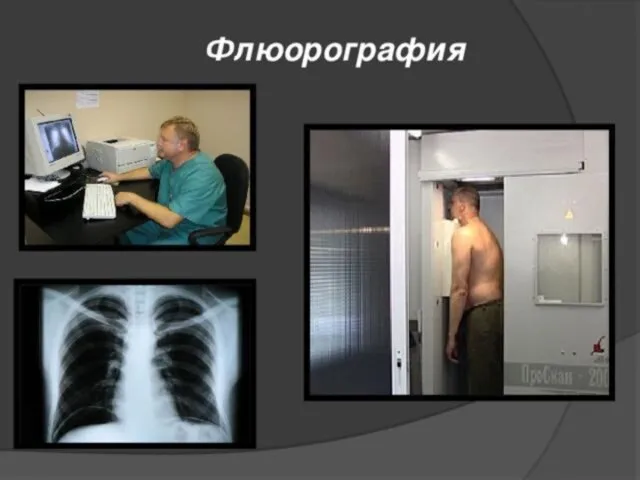 Флюорогра́фия
Флюорогра́фия Медицинское освидетельствование при первоначальной постановке на воинский учет
Медицинское освидетельствование при первоначальной постановке на воинский учет Сердечно-сосудистые исходы в исследованиях ISGLT2
Сердечно-сосудистые исходы в исследованиях ISGLT2 Боли в спине органной этиологии
Боли в спине органной этиологии Universal def of myocardial infarction
Universal def of myocardial infarction Формирование таза и факторы вызывающие его деформацию
Формирование таза и факторы вызывающие его деформацию Эпидемии. Составляющие эпидемического процесса и факторы, определяющие его
Эпидемии. Составляющие эпидемического процесса и факторы, определяющие его Неотложная эндокринология
Неотложная эндокринология Конъюнктивит. Меры профилактики
Конъюнктивит. Меры профилактики Смерть клеток в живом организме – некроз и апоптоз
Смерть клеток в живом организме – некроз и апоптоз Регуляция деятельности сердца
Регуляция деятельности сердца Ге́рпес
Ге́рпес Психические и поведенческие расстройства, связанные с употреблением психоактивных веществ. Алкоголизм
Психические и поведенческие расстройства, связанные с употреблением психоактивных веществ. Алкоголизм Правило посадки
Правило посадки Osteopatia apuntes dorsal
Osteopatia apuntes dorsal Влияние йододефицитных состояний на здоровье часто болеющих детей в практике инфекциониста и педиатра
Влияние йододефицитных состояний на здоровье часто болеющих детей в практике инфекциониста и педиатра