- Резоматрица

Содержание
- 2. Актуальность Cегодня около 1 млн человек перенесли инсульт и ЧМТ. Более половины из них имеют двигательные
- 3. Проблема Существующие устройства на рынке в виде нейроинтерфейсов для реабилитации и оценки состояния скелетных мышц и
- 4. Цель Создать программно-аппаратный комплекс для восстановления мышечной активности в виде игрового процесса.
- 5. Реабилитация с помощью «Резоматрицы»
- 6. Реабилитация после неврологических заболеваний Компьютер Контроллер Оценка состояния мышц Центр обработки данных Передача биометрических данных Оценка
- 7. Задачи проекта: Изучить и проанализировать различные устройства для реабилитации после неврологических заболеваний; Изучить технологии нейрокоммуникации; Разработать
- 8. Устройства для реабилитации Тренажер «Армео» КАН «Регент»
- 9. Устройства для управления Power Glove Razer Hydra
- 10. Требования к устройству: Экологичность; Безопасность: • Помехоустойчивость • Комфортность, удобство в использовании Функциональность: • Компактность позволит
- 11. Упражнения для реабилитации
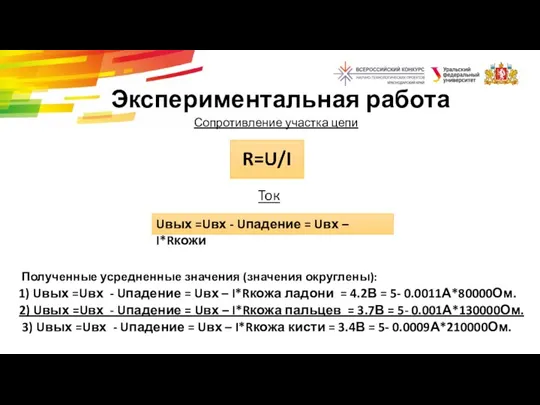
- 12. Сопротивление участка цепи Полученные усредненные значения (значения округлены): 1) Uвых =Uвх - Uпадение = Uвх –
- 13. Выбор компонентов: Элементы нестандартных номиналов Конденсаторы, резисторы, оптоволокно Гальваническая развязка Полосовой фильтр промышленной частоты
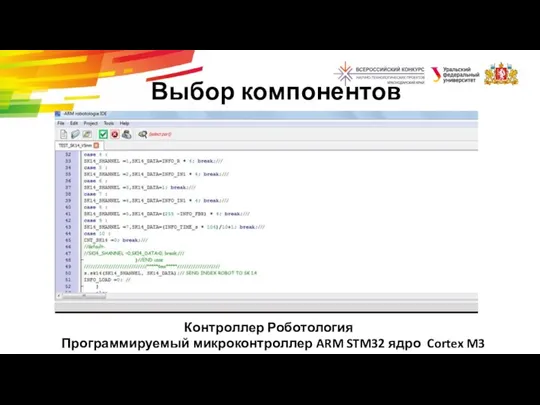
- 14. Выбор компонентов Контроллер Роботология Программируемый микроконтроллер ARM STM32 ядро Cortex M3
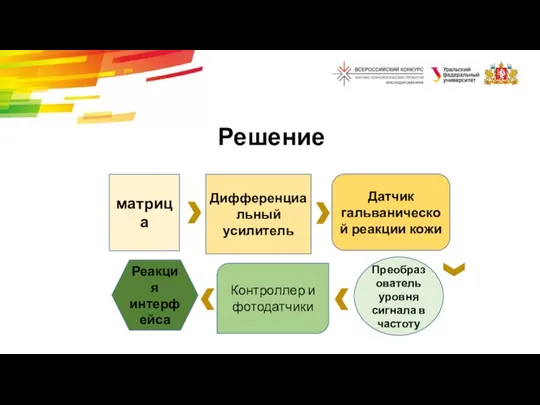
- 15. Решение матрица Дифференциальный усилитель Преобразователь уровня сигнала в частоту Контроллер и фотодатчики Датчик гальванической реакции кожи
- 16. Функциональная схема системы Фиксирование ЭМГ Оценка состояния скелетных мышц и нервов. Измерение ГРК Преобразование в световые
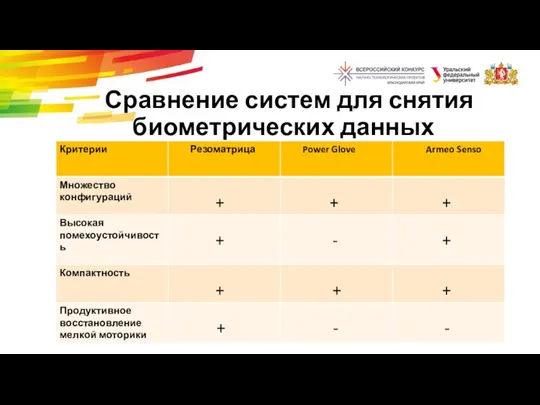
- 17. Сравнение систем для снятия биометрических данных
- 18. Практическое применение Нейротехнологические системы обучения Управление виртуальными объектами Управление техническими объектами Игровая индустрия
- 19. Партнеры проекта УОЦ «Золотое сечение» ПАО «МЗиК»
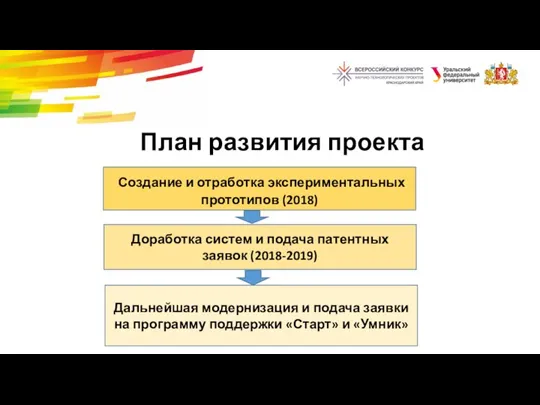
- 20. План развития проекта Создание и отработка экспериментальных прототипов (2018) Доработка систем и подача патентных заявок (2018-2019)
- 21. Команда проекта Новик Даниил Ильинский Александр Андреевских-Якоцук Ульяна Схемотехник Нейротехнолог Робототехник
- 22. Спасибо за внимание!
- 23. Дополнительная информация
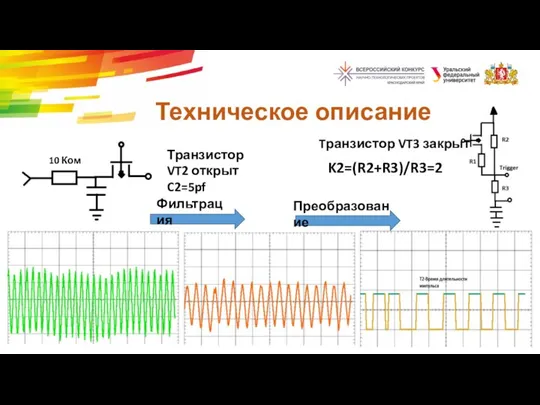
- 24. Техническое описание Фильтрация Преобразование 10 Ком Транзистор VT2 открыт C2=5pf K2=(R2+R3)/R3=2 Tранзистор VT3 закрыт
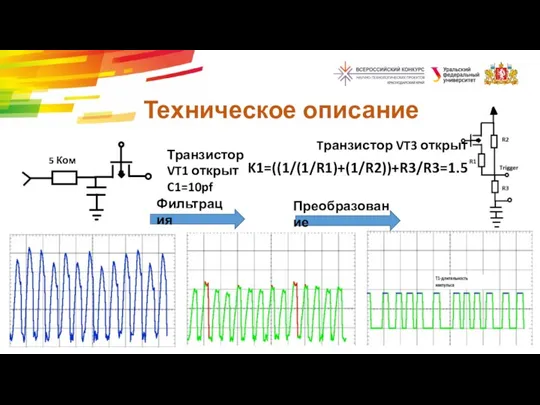
- 25. Техническое описание Фильтрация Преобразование 5 Ком Транзистор VT1 открыт C1=10pf K1=((1/(1/R1)+(1/R2))+R3/R3=1.5 Tранзистор VT3 открыт
- 27. Скачать презентацию

Слайд 3 Проблема
Существующие устройства на рынке в виде нейроинтерфейсов для реабилитации и оценки
Проблема
Существующие устройства на рынке в виде нейроинтерфейсов для реабилитации и оценки
Слайд 4 Цель
Создать программно-аппаратный комплекс для восстановления мышечной активности в виде игрового процесса.
Цель
Создать программно-аппаратный комплекс для восстановления мышечной активности в виде игрового процесса.
Слайд 5Реабилитация с помощью «Резоматрицы»
Реабилитация с помощью «Резоматрицы»

Слайд 6 Реабилитация после неврологических заболеваний
Компьютер
Контроллер
Оценка состояния мышц
Центр обработки данных
Передача
Реабилитация после неврологических заболеваний
Компьютер
Контроллер
Оценка состояния мышц
Центр обработки данных
Передача

Слайд 7 Задачи проекта:
Изучить и проанализировать различные устройства для реабилитации после неврологических заболеваний;
Изучить
Задачи проекта:
Изучить и проанализировать различные устройства для реабилитации после неврологических заболеваний;
Изучить
Слайд 8 Устройства для реабилитации
Тренажер «Армео»
КАН «Регент»
Устройства для реабилитации
Тренажер «Армео»
КАН «Регент»

Слайд 9 Устройства для управления
Power Glove
Razer Hydra
Устройства для управления
Power Glove
Razer Hydra

Слайд 10 Требования к устройству:
Экологичность;
Безопасность:
• Помехоустойчивость
• Комфортность, удобство в использовании
Функциональность:
• Компактность позволит
Требования к устройству:
Экологичность;
Безопасность:
• Помехоустойчивость
• Комфортность, удобство в использовании
Функциональность:
• Компактность позволит
Слайд 11 Упражнения для реабилитации
Упражнения для реабилитации
Слайд 12Сопротивление участка цепи
Полученные усредненные значения (значения округлены):
1) Uвых =Uвх - Uпадение
Сопротивление участка цепи
Полученные усредненные значения (значения округлены):
1) Uвых =Uвх - Uпадение
Слайд 13 Выбор компонентов:
Элементы нестандартных номиналов
Конденсаторы, резисторы, оптоволокно
Гальваническая развязка
Полосовой фильтр промышленной
Выбор компонентов:
Элементы нестандартных номиналов
Конденсаторы, резисторы, оптоволокно
Гальваническая развязка
Полосовой фильтр промышленной

Слайд 14 Выбор компонентов
Контроллер Роботология
Программируемый микроконтроллер ARM STM32 ядро Cortex M3
Выбор компонентов
Контроллер Роботология
Программируемый микроконтроллер ARM STM32 ядро Cortex M3
Слайд 15 Решение
матрица
Дифференциальный
усилитель
Преобразователь уровня сигнала в частоту
Контроллер и фотодатчики
Датчик гальванической реакции
Решение
матрица
Дифференциальный
усилитель
Преобразователь уровня сигнала в частоту
Контроллер и фотодатчики
Датчик гальванической реакции
Слайд 16 Функциональная схема системы
Фиксирование ЭМГ
Оценка состояния скелетных мышц и нервов.
Измерение ГРК
Преобразование в
Функциональная схема системы
Фиксирование ЭМГ
Оценка состояния скелетных мышц и нервов.
Измерение ГРК
Преобразование в

Слайд 17 Сравнение систем для снятия биометрических данных
Сравнение систем для снятия биометрических данных
Слайд 18 Практическое применение
Нейротехнологические системы обучения
Управление виртуальными объектами
Управление техническими объектами
Практическое применение
Нейротехнологические системы обучения
Управление виртуальными объектами
Управление техническими объектами

Слайд 19 Партнеры проекта
УОЦ «Золотое сечение» ПАО «МЗиК»
Партнеры проекта
УОЦ «Золотое сечение» ПАО «МЗиК»
Слайд 20 План развития проекта
Создание и отработка экспериментальных
прототипов (2018)
Доработка систем и
План развития проекта
Создание и отработка экспериментальных
прототипов (2018)
Доработка систем и
Слайд 21 Команда проекта
Новик Даниил
Ильинский Александр
Андреевских-Якоцук
Ульяна
Схемотехник
Нейротехнолог
Робототехник
Команда проекта
Новик Даниил
Ильинский Александр
Андреевских-Якоцук
Ульяна
Схемотехник
Нейротехнолог
Робототехник
Слайд 22 Спасибо за внимание!
Спасибо за внимание!
Слайд 23 Дополнительная информация
Дополнительная информация

Слайд 24 Техническое описание
Фильтрация
Преобразование
10 Ком
Транзистор VT2 открыт
C2=5pf
K2=(R2+R3)/R3=2
Tранзистор VT3 закрыт
Техническое описание
Фильтрация
Преобразование
10 Ком
Транзистор VT2 открыт
C2=5pf
K2=(R2+R3)/R3=2
Tранзистор VT3 закрыт
Слайд 25 Техническое описание
Фильтрация
Преобразование
5 Ком
Транзистор VT1 открыт
C1=10pf
K1=((1/(1/R1)+(1/R2))+R3/R3=1.5
Tранзистор VT3 открыт
Техническое описание
Фильтрация
Преобразование
5 Ком
Транзистор VT1 открыт
C1=10pf
K1=((1/(1/R1)+(1/R2))+R3/R3=1.5
Tранзистор VT3 открыт
 Наследственные формы КРР
Наследственные формы КРР Артикуляция, окклюзия, прикус
Артикуляция, окклюзия, прикус Остановка кровотечений при ранениях и повреждениях головы и лица
Остановка кровотечений при ранениях и повреждениях головы и лица Шовный материал
Шовный материал Введення знеболювальних засобів за допомогою шприца-тюбика
Введення знеболювальних засобів за допомогою шприца-тюбика Биттеу. Биттің түрлері
Биттеу. Биттің түрлері Рентгендиагностика в стоматологии
Рентгендиагностика в стоматологии Патология позвоночника
Патология позвоночника Онихомикоз. Определение
Онихомикоз. Определение Аддикции. Вводная лекция
Аддикции. Вводная лекция Перелом костей черепа
Перелом костей черепа Санаторий Сосны в Республике Беларусь
Санаторий Сосны в Республике Беларусь Моё мнение о наркотиках
Моё мнение о наркотиках Правила поведения у врача
Правила поведения у врача Балалар мен ересектердегі ісіктік процесстердің локализациясы мен кездесу жиілігінің айырмашылықтары
Балалар мен ересектердегі ісіктік процесстердің локализациясы мен кездесу жиілігінің айырмашылықтары Актуальность вопроса санации трахеобронхиального дерева пациентам, находящимся на аппарате искусственной вентиляции легких
Актуальность вопроса санации трахеобронхиального дерева пациентам, находящимся на аппарате искусственной вентиляции легких Цилиндр
Цилиндр Медицинская протозоология
Медицинская протозоология Экстрагенитальные заболевания при беременности
Экстрагенитальные заболевания при беременности Патология углеводного обмена
Патология углеводного обмена Основы микробиологии, санитарии и гигиены
Основы микробиологии, санитарии и гигиены Клиническая фармакология лекарственных средств для лечения сердечной недостаточности
Клиническая фармакология лекарственных средств для лечения сердечной недостаточности Нарушения психического развития, обусловленные генетической патологией
Нарушения психического развития, обусловленные генетической патологией Артроз суставов. Продукция EnjoyNT:
Артроз суставов. Продукция EnjoyNT: Гостевой дом Деревенька. Оздоровительная программа на 3 дня Быстрое восстановление
Гостевой дом Деревенька. Оздоровительная программа на 3 дня Быстрое восстановление Экдокринная система и органы иммунной защиты. Контрольные микропрепараты и электроннограммы
Экдокринная система и органы иммунной защиты. Контрольные микропрепараты и электроннограммы ГЛС щитовидной, паращитовидных желез, поджелудочной железы
ГЛС щитовидной, паращитовидных желез, поджелудочной железы Жедудочно-кишечные кровотечения
Жедудочно-кишечные кровотечения