« Адаптивная система автоматического управления движением космического манипулятора» Автор: Косарев Игорь Викторович, класс 11 Б.
- « Адаптивная система автоматического управления движением космического манипулятора» Автор: Косарев Игорь Викторович, класс 11 Б.

Содержание
- 2. В 2011 году разработан «липучий» манипулятор для захвата объектов в космосе. Устройство работает за счёт электростатического
- 3. Задачей робота поставим принятие положения при котором устройство должно обойти препятствие и "взять" объект, т.е разместить
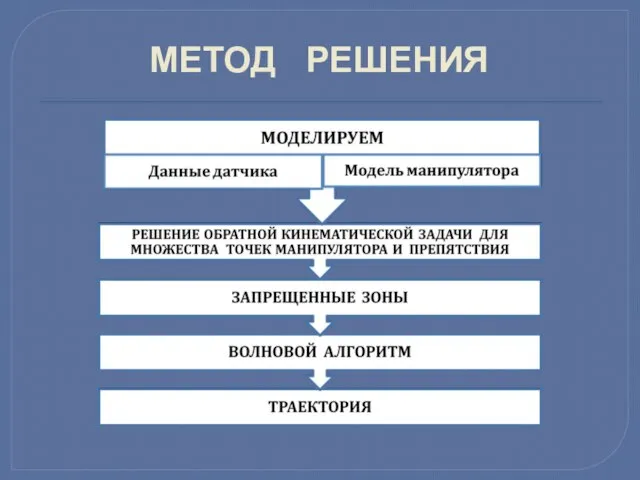
- 4. МЕТОД РЕШЕНИЯ
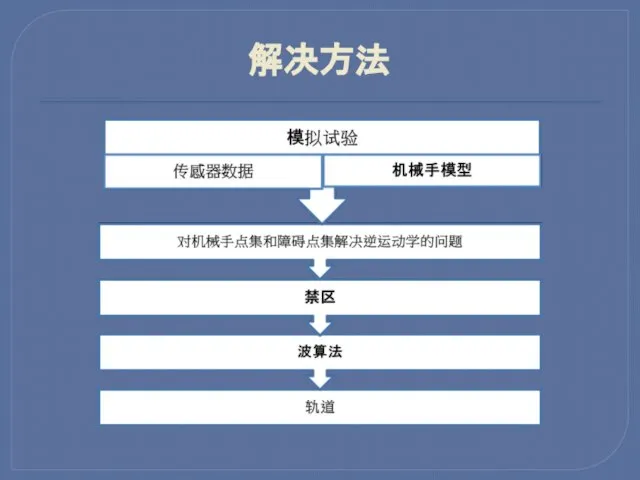
- 5. 解决方法
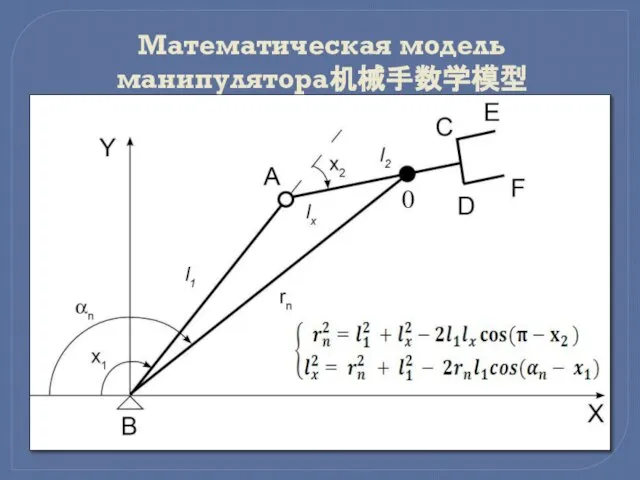
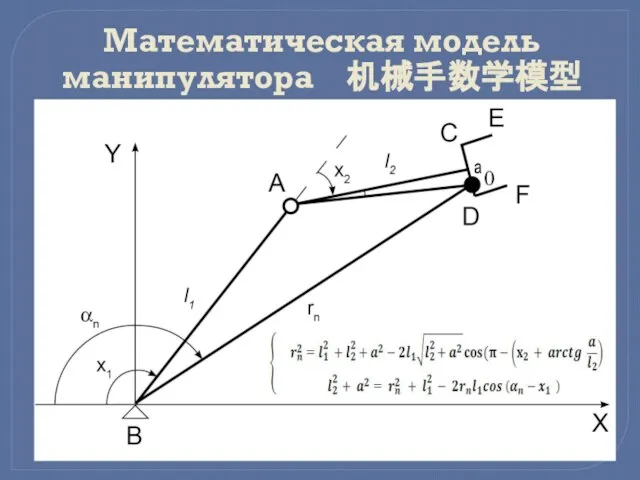
- 6. Математическая модель манипулятора机械手数学模型
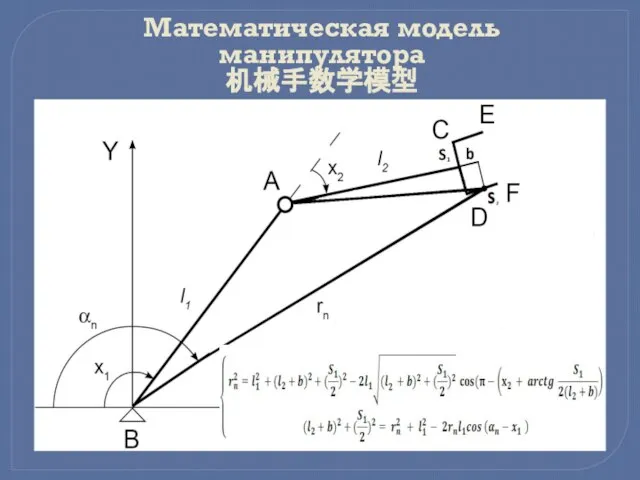
- 7. Математическая модель манипулятора 机械手数学模型
- 8. Математическая модель манипулятора 机械手数学模型
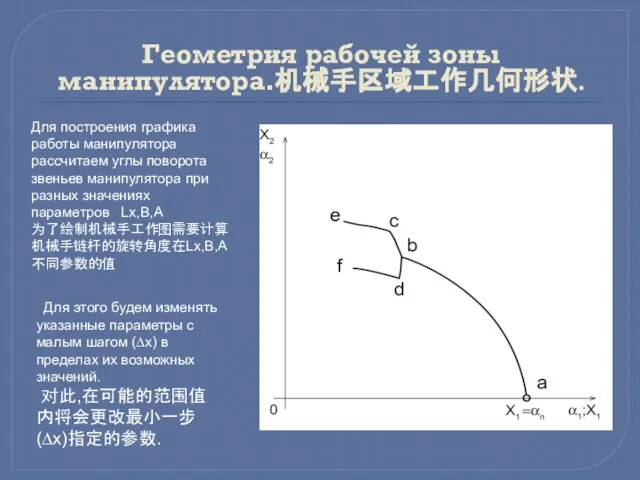
- 9. Геометрия рабочей зоны манипулятора.机械手区域工作几何形状. Для построения графика работы манипулятора рассчитаем углы поворота звеньев манипулятора при разных
- 10. Волновой алгоритм — это алгоритм, который позволяет найти минимальный путь в графе. 波算法 — 这是能够使我们在图中找到最小路径的算法。 ВОЛНОВОЙ
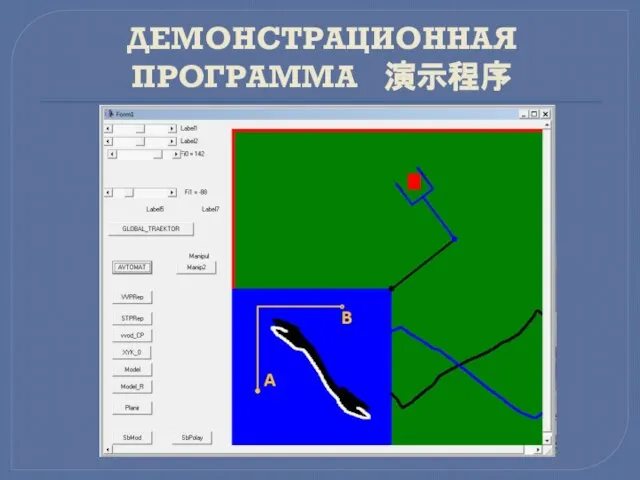
- 11. ДЕМОНСТРАЦИОННАЯ ПРОГРАММА 演示程序
- 13. Скачать презентацию

Слайд 3
Задачей робота поставим принятие положения при котором устройство должно обойти препятствие
Задачей робота поставим принятие положения при котором устройство должно обойти препятствие
Слайд 4
МЕТОД РЕШЕНИЯ
МЕТОД РЕШЕНИЯ
Слайд 5
解决方法
解决方法
Слайд 6
Математическая модель манипулятора机械手数学模型
Математическая модель манипулятора机械手数学模型
Слайд 7
Математическая модель манипулятора 机械手数学模型
Математическая модель манипулятора 机械手数学模型
Слайд 8
Математическая модель манипулятора
机械手数学模型
Математическая модель манипулятора
机械手数学模型
Слайд 9
Геометрия рабочей зоны манипулятора.机械手区域工作几何形状.
Для построения графика работы манипулятора рассчитаем углы поворота
Геометрия рабочей зоны манипулятора.机械手区域工作几何形状.
Для построения графика работы манипулятора рассчитаем углы поворота
Слайд 10
Волновой алгоритм — это алгоритм, который позволяет найти минимальный путь в
Волновой алгоритм — это алгоритм, который позволяет найти минимальный путь в

Слайд 11
ДЕМОНСТРАЦИОННАЯ ПРОГРАММА 演示程序
ДЕМОНСТРАЦИОННАЯ ПРОГРАММА 演示程序
 Продажа права аренды
Продажа права аренды “Человек без всякого воображения может собирать факты, но никогда не сделает великого открытия, а русский физик-теоретик академик
“Человек без всякого воображения может собирать факты, но никогда не сделает великого открытия, а русский физик-теоретик академик Беларусь 2020
Беларусь 2020 Система развивающего обучения Л.В. Занкова
Система развивающего обучения Л.В. Занкова КАК НАЧИНАЛСЯ ПЕТЕРБУРГ?
КАК НАЧИНАЛСЯ ПЕТЕРБУРГ? Интересные музеи. Музей-детям
Интересные музеи. Музей-детям ГИА -2012( схема организации и проведения)
ГИА -2012( схема организации и проведения) Презентация на тему Чехов "Ванька"
Презентация на тему Чехов "Ванька" Определи падеж.
Определи падеж. Нарушения прав ребенка. Что с этим делать???
Нарушения прав ребенка. Что с этим делать??? Питание. Организация питания
Питание. Организация питания Автоматизированное тестирование веб-приложений
Автоматизированное тестирование веб-приложений ЕТ 301 Модельный ряд AUDI AG
ЕТ 301 Модельный ряд AUDI AG Назначение рубки
Назначение рубки Путь в жизни и в литературе Б.Л. Пастернак (1890 – 1960)
Путь в жизни и в литературе Б.Л. Пастернак (1890 – 1960) Правильные многогранники
Правильные многогранники 6_zanyatie_Prostye_tryuki_dlya_sozdania_neobychnykh_fotografiy (1)
6_zanyatie_Prostye_tryuki_dlya_sozdania_neobychnykh_fotografiy (1) Умеешь, саночки возить, умей и кататься!
Умеешь, саночки возить, умей и кататься! ДЕТИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ(1941-1945 г.г.)
ДЕТИ ВЕЛИКОЙ ОТЕЧЕСТВЕННОЙ ВОЙНЫ(1941-1945 г.г.) Как выбрать питомца в соответствии со своим типом темперамента
Как выбрать питомца в соответствии со своим типом темперамента Инструкция по использованию единой информационной системы: Сетевой город. Образование (СГО)
Инструкция по использованию единой информационной системы: Сетевой город. Образование (СГО) Рисунки. Иштуганова Альбина. 12 лет
Рисунки. Иштуганова Альбина. 12 лет Дефекты рельсов и стрелочных переводов. Классификация дефектов рельсов и повреждений
Дефекты рельсов и стрелочных переводов. Классификация дефектов рельсов и повреждений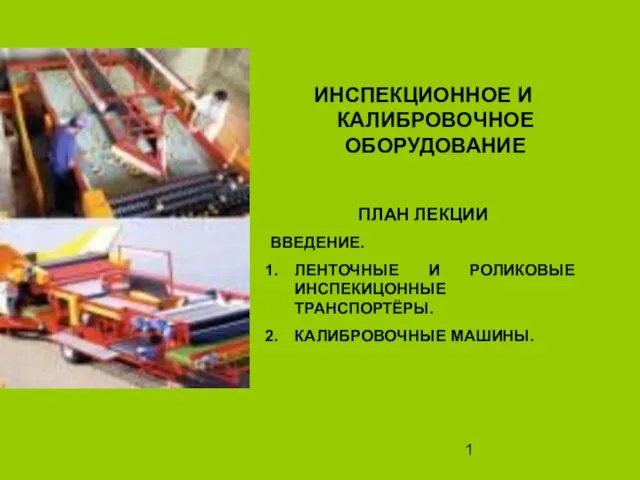 ИНСПЕКЦИОННОЕ И КАЛИБРОВОЧНОЕ ОБОРУДОВАНИЕ ПЛАН ЛЕКЦИИ ВВЕДЕНИЕ. ЛЕНТОЧНЫЕ И РОЛИКОВЫЕ ИНСПЕКИЦОННЫЕ ТРАНСПОРТЁРЫ. КАЛИБРОВОЧН
ИНСПЕКЦИОННОЕ И КАЛИБРОВОЧНОЕ ОБОРУДОВАНИЕ ПЛАН ЛЕКЦИИ ВВЕДЕНИЕ. ЛЕНТОЧНЫЕ И РОЛИКОВЫЕ ИНСПЕКИЦОННЫЕ ТРАНСПОРТЁРЫ. КАЛИБРОВОЧН Презентация1 (2)
Презентация1 (2) Ошибки родителей при обучении детей чтению
Ошибки родителей при обучении детей чтению Приняв услугу один раз, расстаешься с вольностью навсегда. Публилий Сир
Приняв услугу один раз, расстаешься с вольностью навсегда. Публилий Сир Хокусай
Хокусай