- Асинхронный двигатель. (Лекция 4)

Содержание
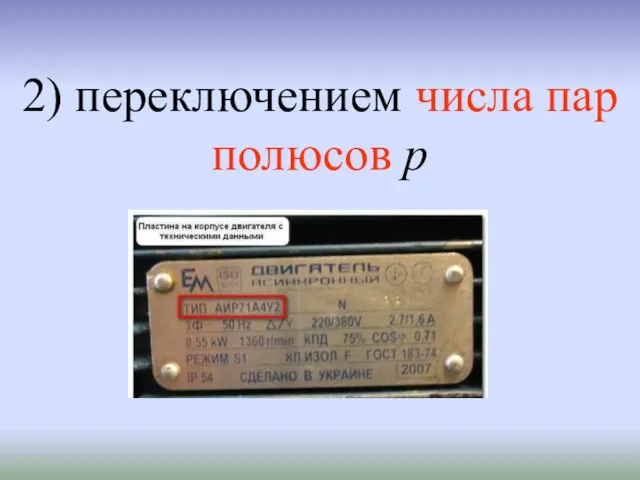
- 2. Номинальные данные АД на табличке корпуса: 1. Номинальная мощность – это номинальная механическая мощность на валу.
- 3. 4. Частота вращения ротора. 5. Коэффициент мощности. 6. Коэффициент полезного действия
- 4. Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора асинхронного двигателя можно рассматривать
- 5. АД при заторможенном роторе Вращающееся магнитное поле статора, пересекая неподвижные обмотки статора и ротора, будет индуктировать
- 6. Ток холостого хода IO АД из-за наличия воздушного зазора между ротором и статором значительно больше, чем
- 7. Реактивная составляющая тока Iо является намагничивающей, так как она создает поток Ф. Активная составляющая Iоа вызывается
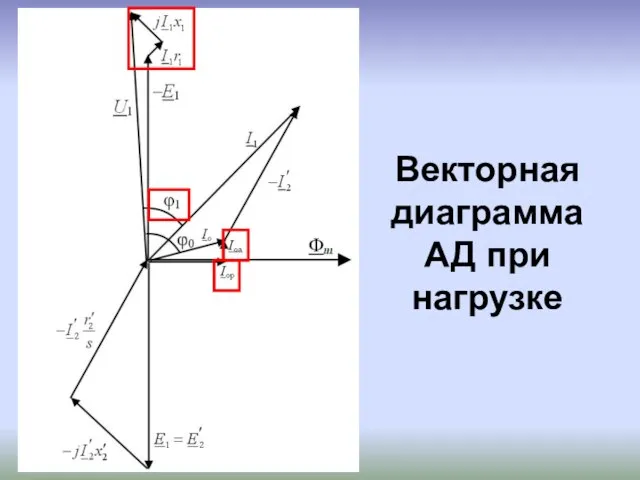
- 8. Векторная диаграмма АД при нагрузке
- 9. Для уменьшения тока холостого хода заводы-изготовители стремятся выполнить в асинхронных двигателях минимально возможные воздушные зазоры. В
- 10. Асинхронный двигатель при вращающемся роторе: Вращающийся магнитный поток статора, обгоняя ротор, индуктирует в нем ЭДС и
- 11. Ток вращающегося ротора
- 12. Основные уравнения приведенного АД Уравнение равновесия напряжений в обмотке статора
- 13. Уравнение равновесия напряжений в обмотке ротора Приведение роторной обмотки осуществляется к числу витков и числу фаз
- 14. Схемы замещения АД Для расчета характеристик АД и исследования различных режимов его работы удобно использовать схемы
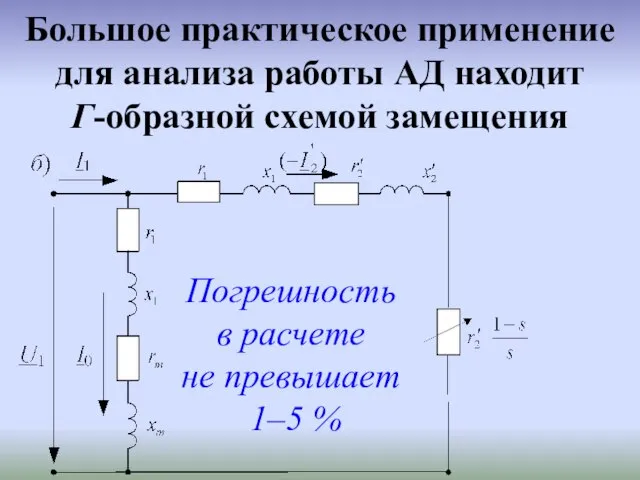
- 15. Большое практическое применение для анализа работы АД находит Г-образной схемой замещения Погрешность в расчете не превышает
- 16. Обозначения: r1 и x1– активное и индуктивное сопротивления фазной обмотки статора; – приведенные активное и индуктивное
- 17. параметры намагничивающей ветви схемы. Индуктивная составляющая является индуктивным сопротивлением взаимной индукции. Как и в трансформаторе, сопротивление
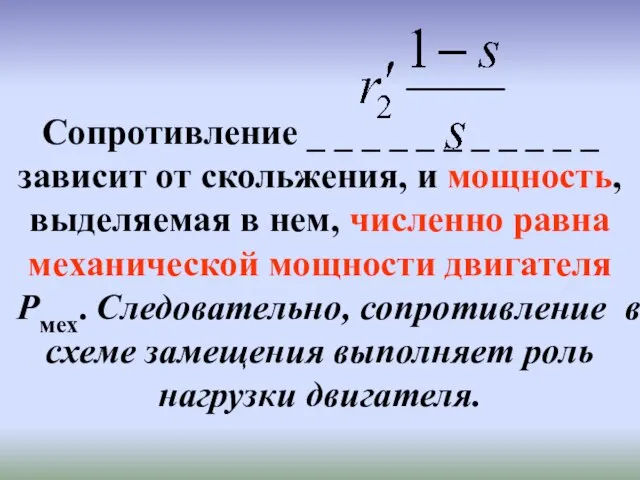
- 18. Сопротивление _ _ _ _ _ _ _ _ _ _ _ зависит от скольжения, и
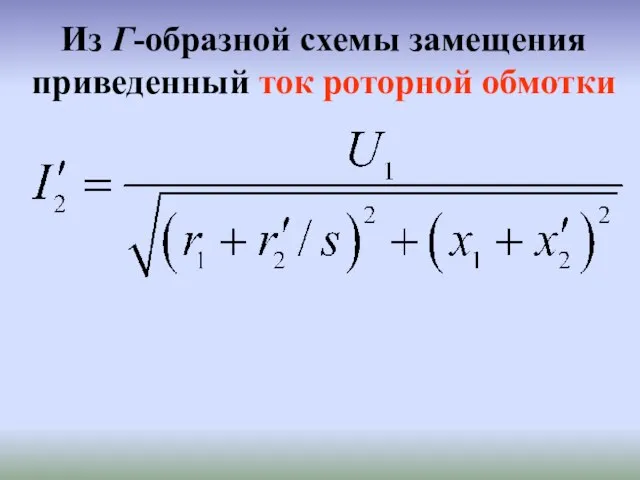
- 19. Из Г-образной схемы замещения приведенный ток роторной обмотки
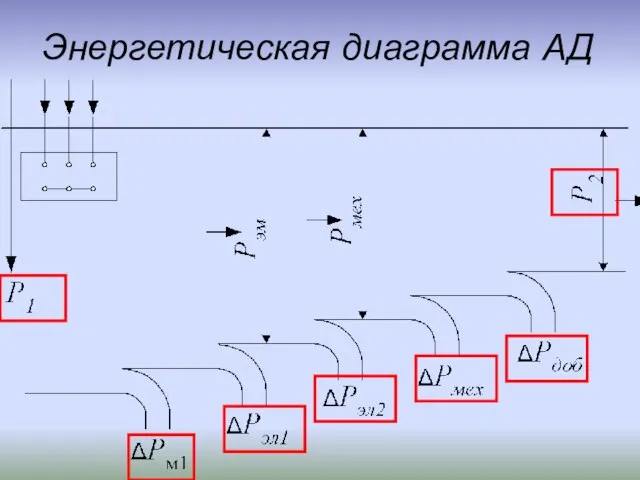
- 20. Энергетическая диаграмма АД
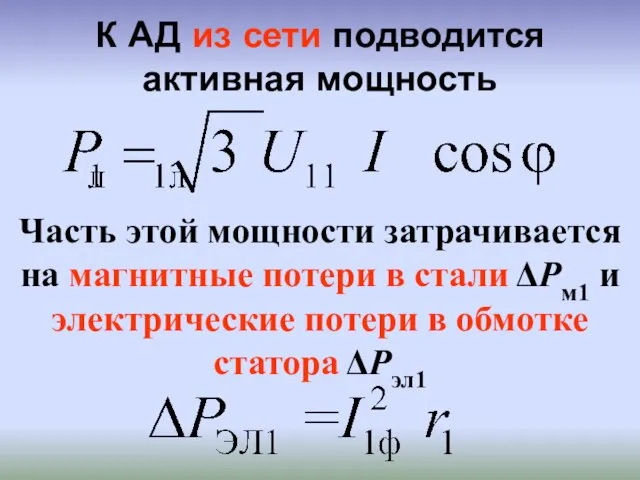
- 21. К АД из сети подводится активная мощность Часть этой мощности затрачивается на магнитные потери в стали
- 22. Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью Рэм= Р1 – ΔРм1 –
- 23. Магнитные потери в роторе из-за малой частоты перемагничивания стали (0,5...2)Гц малы, и поэтому их не учитывают.
- 24. Добавочные потери ΔРдоб связаны с высшими гармониками МДС в магнитном поле из-за зубчатого строения статора и
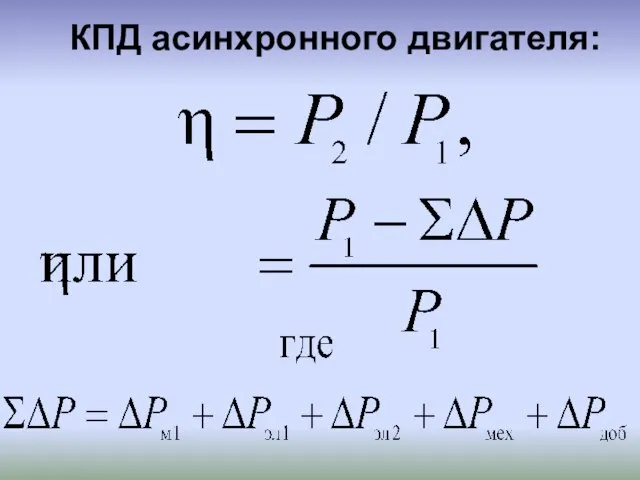
- 25. КПД асинхронного двигателя:
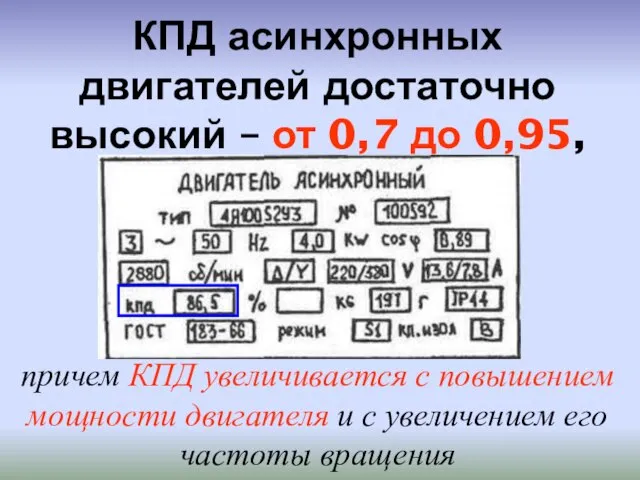
- 26. КПД асинхронных двигателей достаточно высокий – от 0,7 до 0,95, причем КПД увеличивается с повышением мощности
- 27. КПД асинхронного двигателя:
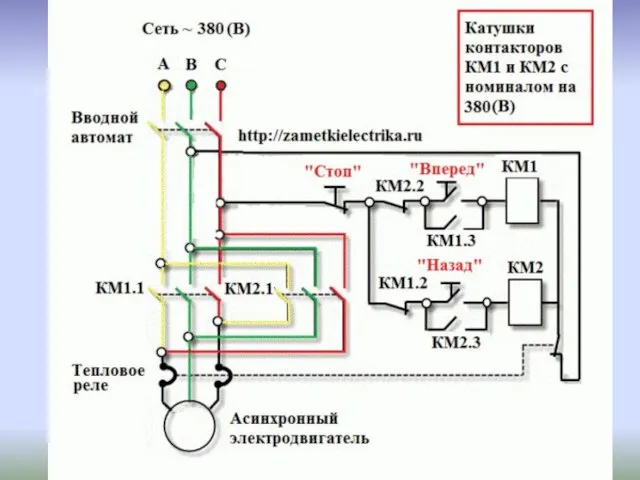
- 28. Реверс – это изменение направления вращения ротора. Необходимо изменить направление вращения магнитного поля статора, что в
- 33. Рассчитать механическую характеристику можно по паспортным данным АД с помощью формул М. Клосса:
- 34. Пусковые свойства двигателя характеризуются кратностью пускового момента Перегрузочная способность двигателя оценивается кратностью максимального момента
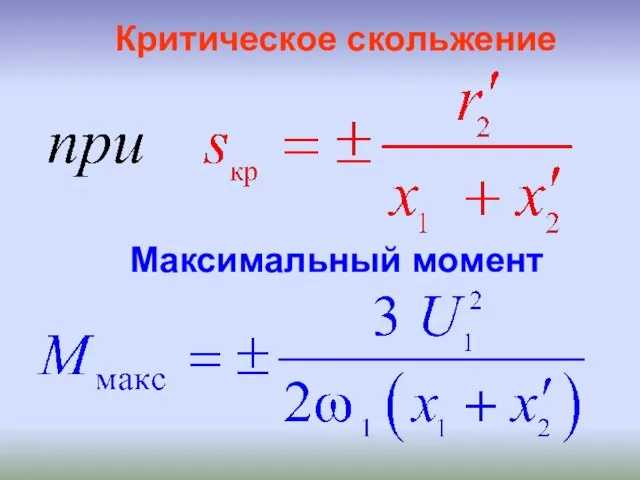
- 35. Критическое скольжение Максимальный момент
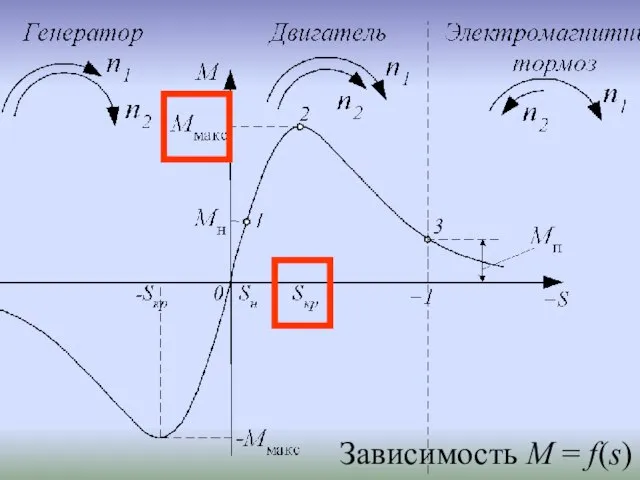
- 36. Зависимость М = f(s)
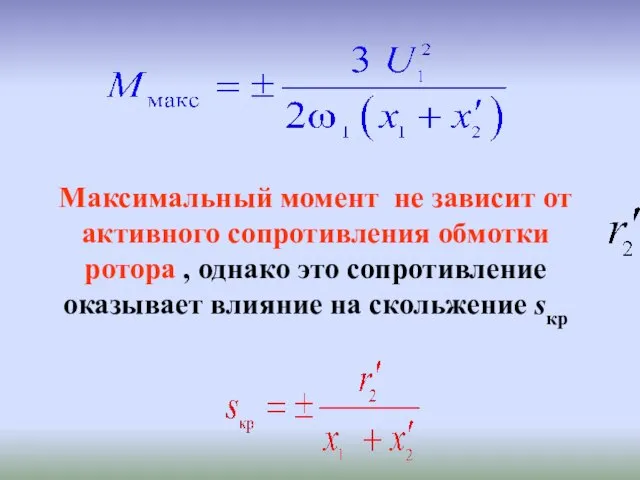
- 37. Максимальный момент не зависит от активного сопротивления обмотки ротора , однако это сопротивление оказывает влияние на
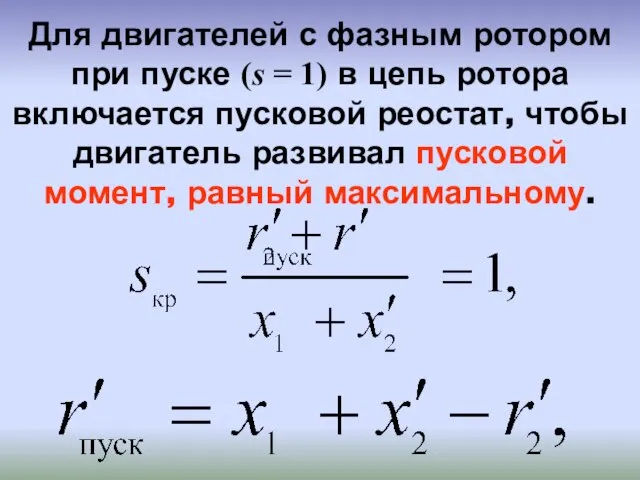
- 38. Для двигателей с фазным ротором при пуске (s = 1) в цепь ротора включается пусковой реостат,
- 39. Зависимости М = f(s) при различных значениях сопротивления пускового реостата
- 40. Зависимость М ≡ U12 является недостатком АД. Например, если U1 понизится на 25%, т. е. U1
- 41. Рабочие характеристики асинхронного двигателя При изменении нагрузки двигателя происходит изменение тока I1, мощности P1, частоты вращения
- 42. Схема для определения характеристик АД Метод непосредствен-ной нагрузки
- 43. Примерный вид рабочих характеристик АД
- 44. При холостом ходе (P2=0 и M2=0) ток I1 равен току холостого хода I0. Как и в
- 45. Мощность P10 при холостом ходе расходуется на потери внутри машины: -механические потери ∆Pмех, -магнитные потери в
- 46. Увеличение момента M2 сопровождается увеличением тока ротора I2, что связано с увеличением ЭДС E2S вследствие снижения
- 47. Пуск в ход АД n=0 В момент пуска ротор неподвижен и в роторе индуктируется большая ЭДС,
- 48. При пуске должны удовлетворяться требования: - пуск должен быть простым; - пусковой момент должен быть достаточно
- 49. Практически используют следующие способы пуска: 1. Включение обмотки статора в сеть (прямой пуск); 2. Понижение напряжения,
- 50. Применяют для пуска АД с короткозамкнутым ротором. Если МП 1. Прямой пуск
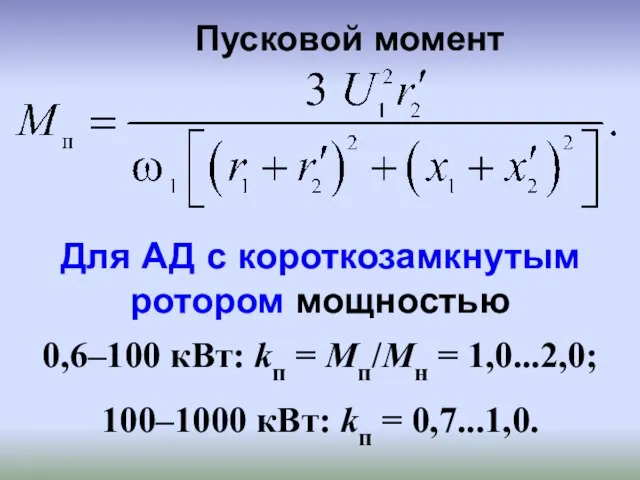
- 51. Для АД с короткозамкнутым ротором мощностью 0,6–100 кВт: kп = Mп/Mн = 1,0...2,0; 100–1000 кВт: kп
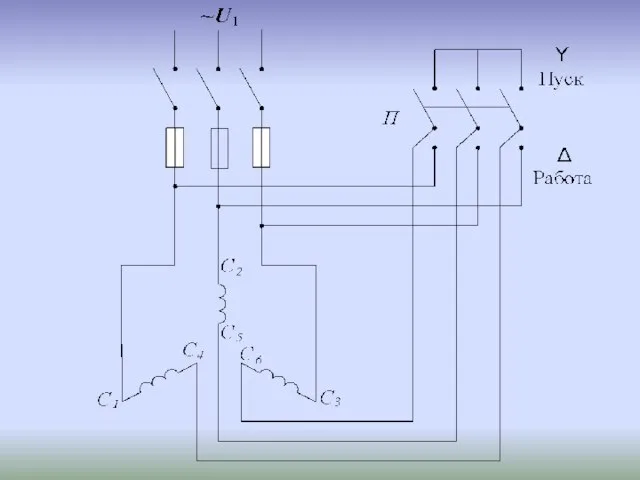
- 52. Пуск при пониженном напряжении. Для АД с КЗР большой мощности. Понижение напряжения выполняют путем переключения обмотки
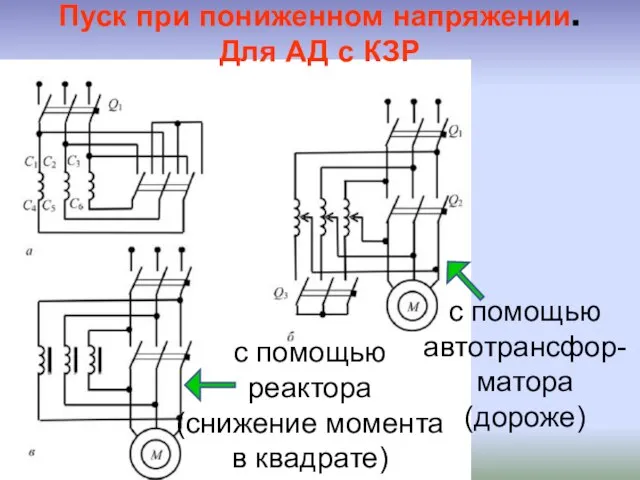
- 53. Пуск при пониженном напряжении. Для АД с КЗР с помощью автотрансфор-матора (дороже) с помощью реактора (снижение
- 55. При включении обмотки статора по схеме Y линейные токи уменьшаются в 3 раза по сравнению с
- 56. Механические характеристики при включении обмотки статора АД по схемам Y и ∆
- 57. Недостаток: пусковой и вращающий моменты двигателя, пропорциональные квадрату напряжения сети, уменьшаются в 3 раза.
- 58. Пуск с помощью реостата в цепи ротора. Применяют только для пуска АД с фазным ротором. Пусковой
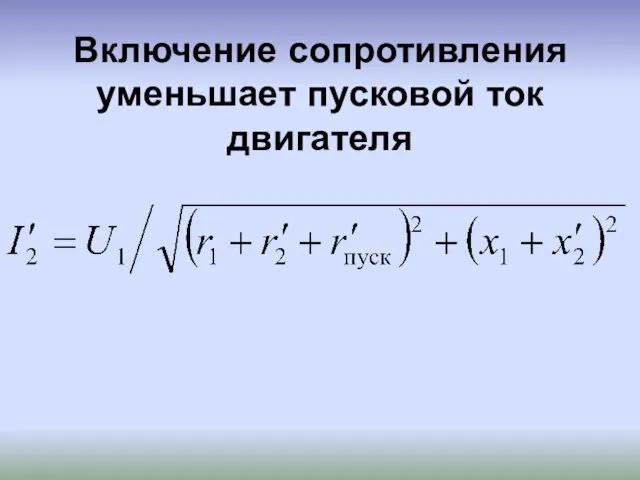
- 60. Включение сопротивления уменьшает пусковой ток двигателя
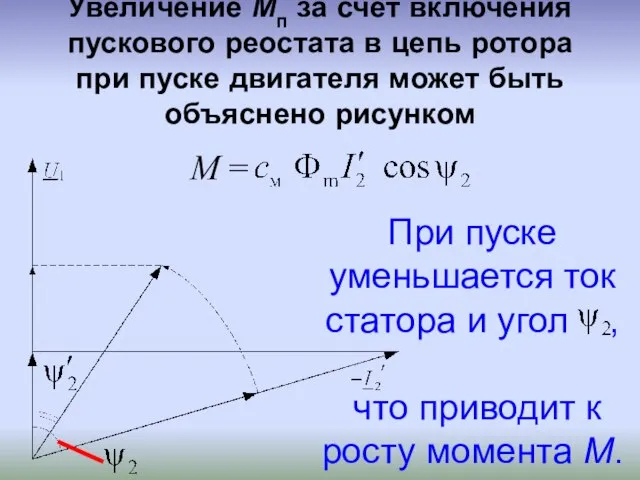
- 61. Увеличение Mп за счет включения пускового реостата в цепь ротора при пуске двигателя может быть объяснено
- 62. Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с ФР имеют худшие рабочие
- 63. Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с ФР имеют худшие рабочие
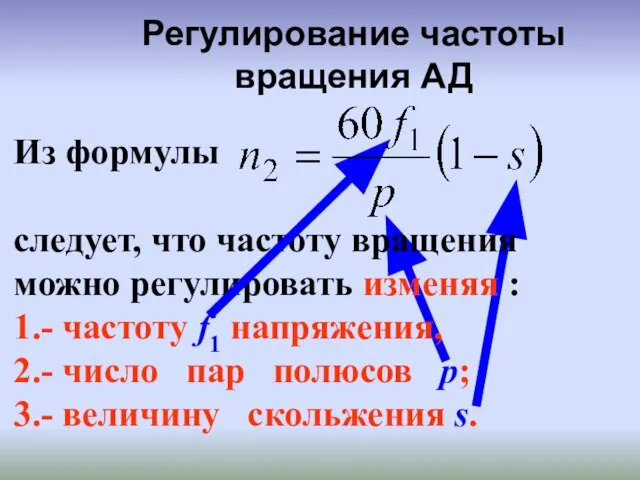
- 64. Из формулы следует, что частоту вращения можно регулировать изменяя : 1.- частоту f1 напряжения, 2.- число
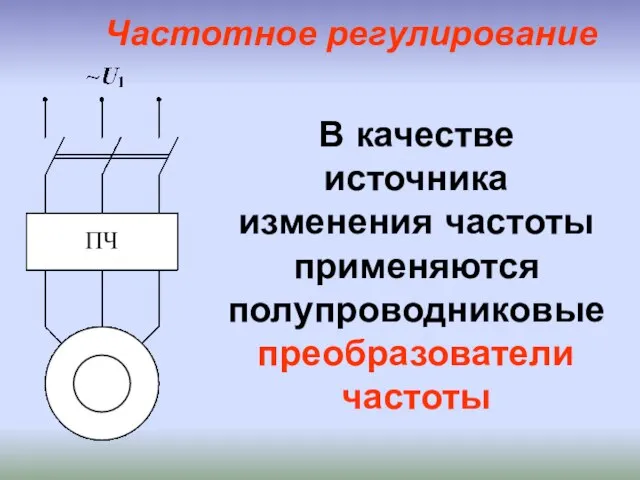
- 65. В качестве источника изменения частоты применяются полупроводниковые преобразователи частоты Частотное регулирование
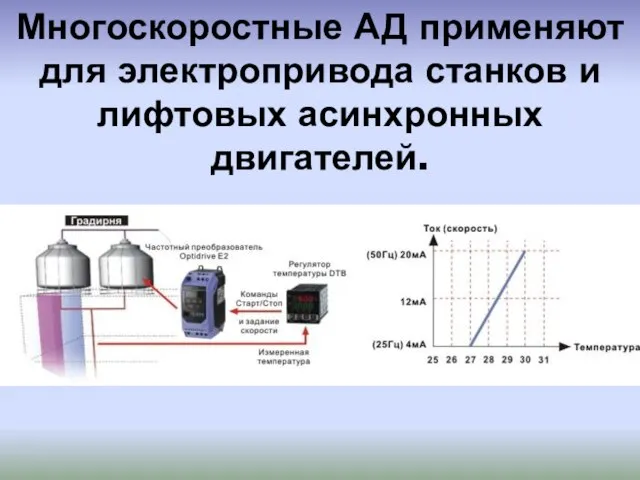
- 66. Область применения: насосы, лифты , компрессоры, экструдеры, вентиляторы, станки
- 68. 1-2,5 кВт 180-200 $
- 69. изменением частоты f1 питающего напряжения!!!
- 72. Структурная схема частотных преобразователей со звеном постоянного тока компаний Omron и Yaskawa
- 73. Широтно-импульсная модуляция
- 75. Надежность частотных преобразователей Omron
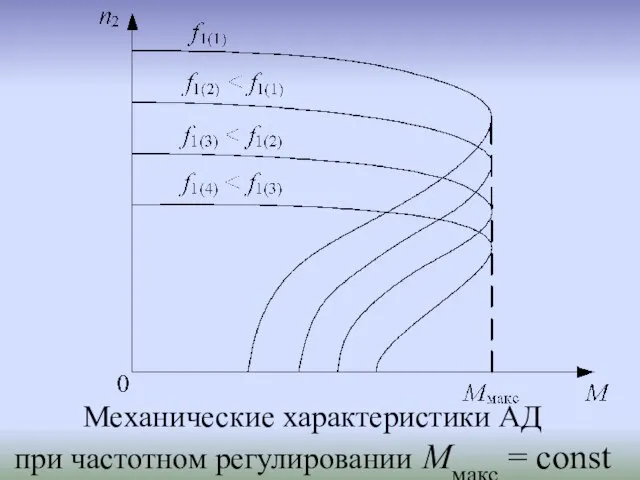
- 76. При частотном регулировании одновременно с изменением частоты f1 приходится изменять и подводимое напряжение U1 Для неизменного
- 77. При этом основной магнитный поток машины при различных значениях частоты f1 остается неизменным
- 78. Механические характеристики АД при частотном регулировании Mмакс = const
- 79. 2) переключением числа пар полюсов p
- 80. Многоскоростные АД применяют для электропривода станков и лифтовых асинхронных двигателей.
- 81. Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на две, три и четыре
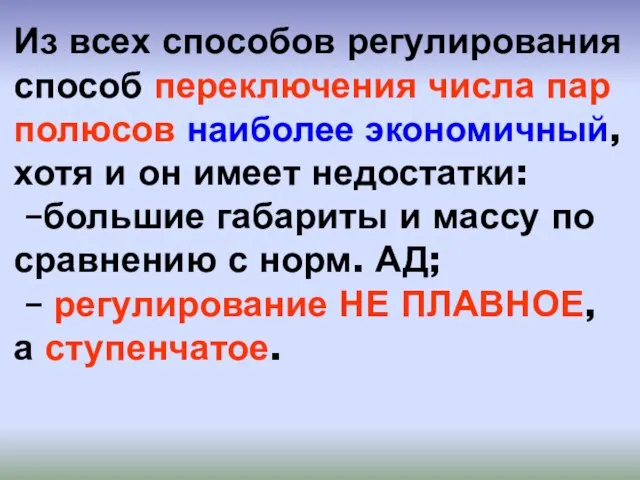
- 82. Из всех способов регулирования способ переключения числа пар полюсов наиболее экономичный, хотя и он имеет недостатки:
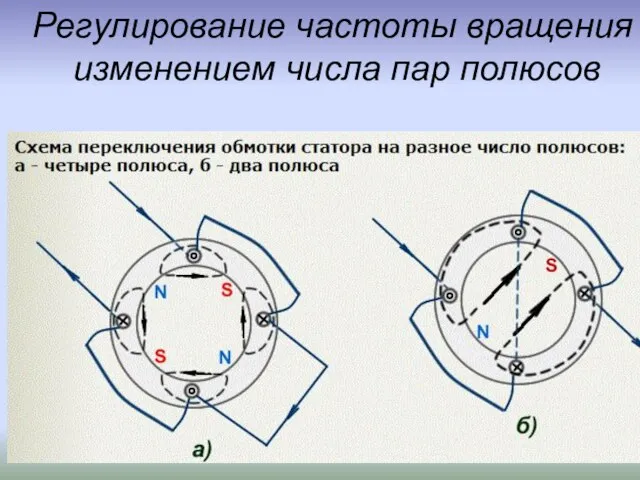
- 83. Регулирование частоты вращения изменением числа пар полюсов
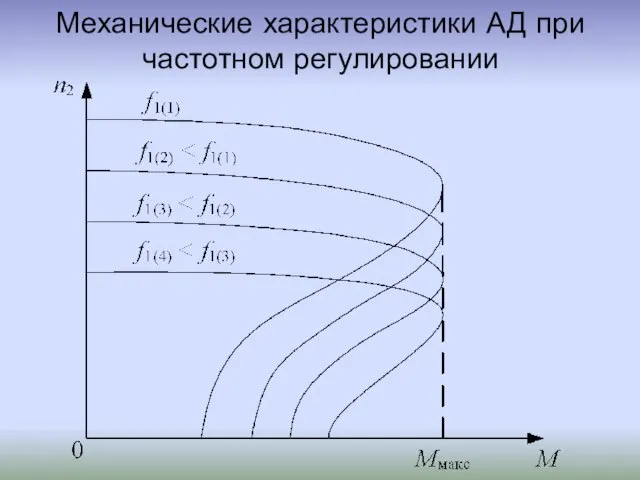
- 84. Механические характеристики АД при частотном регулировании
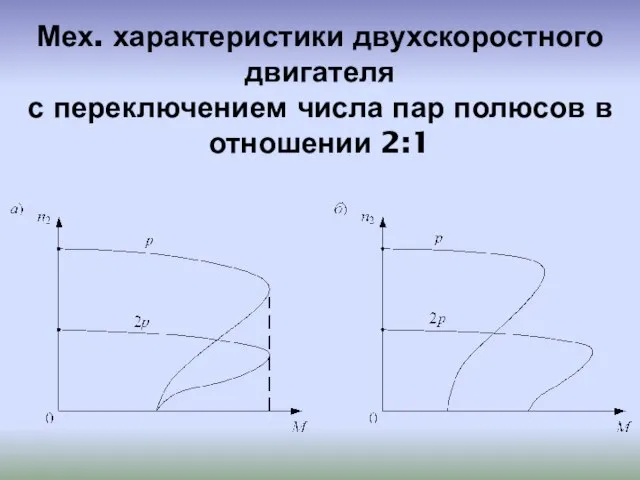
- 85. Мех. характеристики двухскоростного двигателя с переключением числа пар полюсов в отношении 2:1
- 86. Данный способ регулирования частоты вращения применяется только для АД с короткозамкнутым ротором.
- 87. Регулирование частоты вращения АД путем включения в цепь ротора добавочного активного сопротивления. Применяется только в АД
- 88. Регулировочный реостат должен быть рассчитан на длительный режим работы.
- 89. Недостатком этого способа являются большие потери энергии в добавочных сопротивлениях. На практике данный способ применяется для
- 90. Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой техники , насосов. Их
- 91. Однофазные АД
- 92. Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой техники , насосов. Их
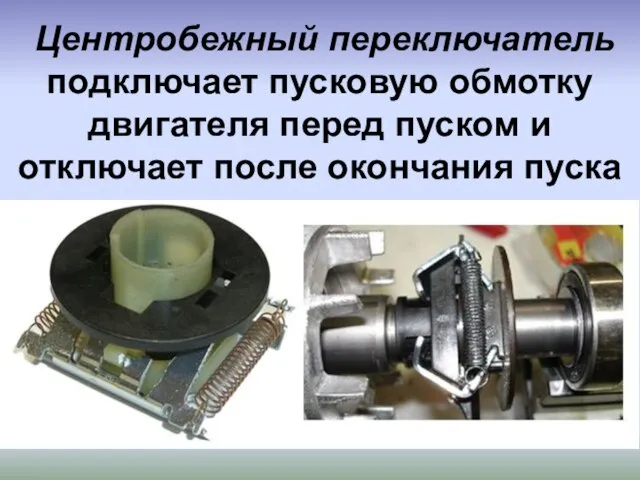
- 94. Центробежный переключатель подключает пусковую обмотку двигателя перед пуском и отключает после окончания пуска
- 95. В однофазном АД обмотка статора создает неподвижный поток, изменяющийся во времени, а не круговой вращающийся, как
- 96. Неподвижный пульсирующий магнитный поток представляется суммой двух круговых вращающихся полей, имеющих одинаковые частоты вращения n1пр =
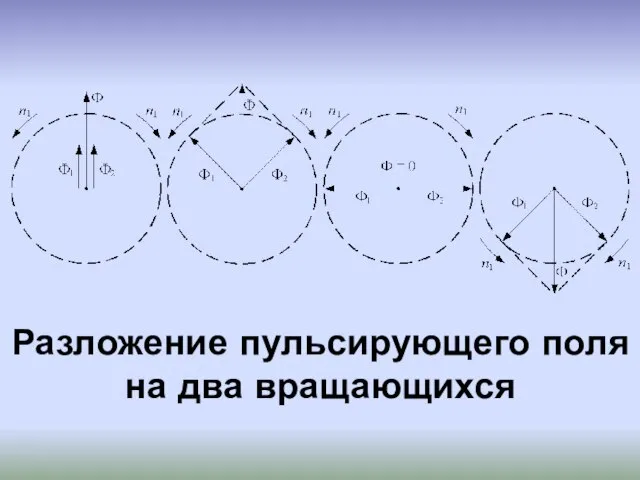
- 97. Разложение пульсирующего поля на два вращающихся
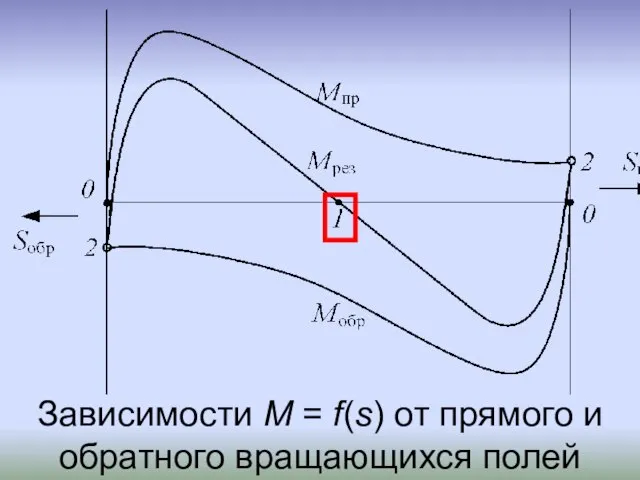
- 98. Зависимости М = f(s) от прямого и обратного вращающихся полей
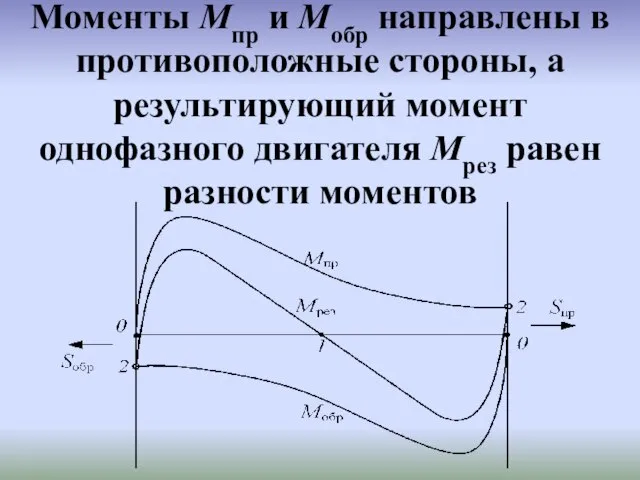
- 99. Моменты Mпр и Mобр направлены в противоположные стороны, а результирующий момент однофазного двигателя Mрез равен разности
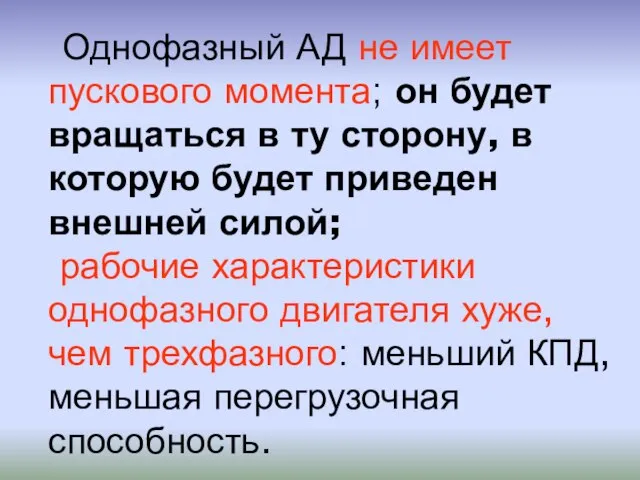
- 100. Однофазный АД не имеет пускового момента; он будет вращаться в ту сторону, в которую будет приведен
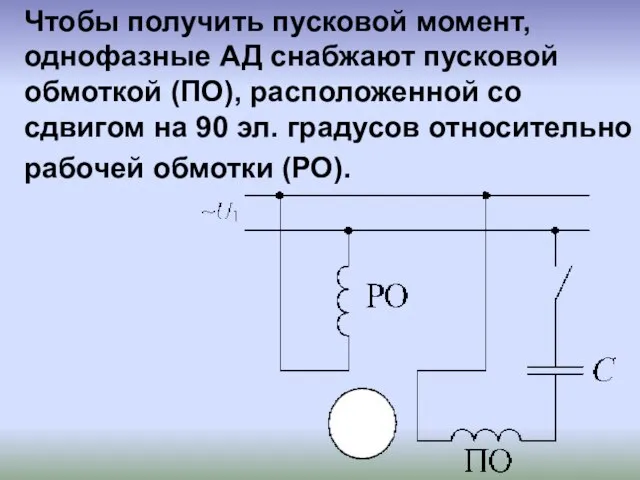
- 101. Чтобы получить пусковой момент, однофазные АД снабжают пусковой обмоткой (ПО), расположенной со сдвигом на 90 эл.
- 102. Пусковой конденсатор
- 103. Поскольку включение второй обмотки существенно улучшает механическую характеристику двигателя, в некоторых случаях применяют однофазные двигатели, в
- 104. Недостатком его является сравнительно большая масса и габариты конденсатора.
- 105. Ограничения при их применении: - однофазные АД нельзя использовать в режиме холостого хода - при малых
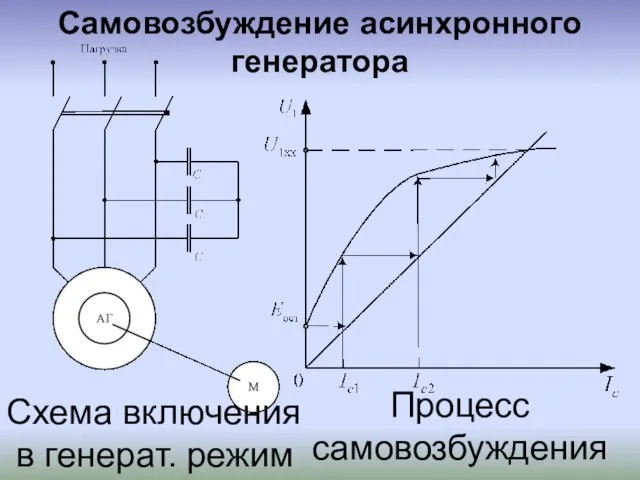
- 106. Асинхронная машина в режиме генератора Для самовозбуждения генератора должны выполняться следующие условия: 1 наличие остаточного магнитного
- 107. Самовозбуждение асинхронного генератора Процесс самовозбуждения Схема включения в генерат. режим
- 108. Недостатки асинхр. генератора: – необх. конденсаторные батареи; – проблемы при работе на индуктивную нагрузку; – сложная
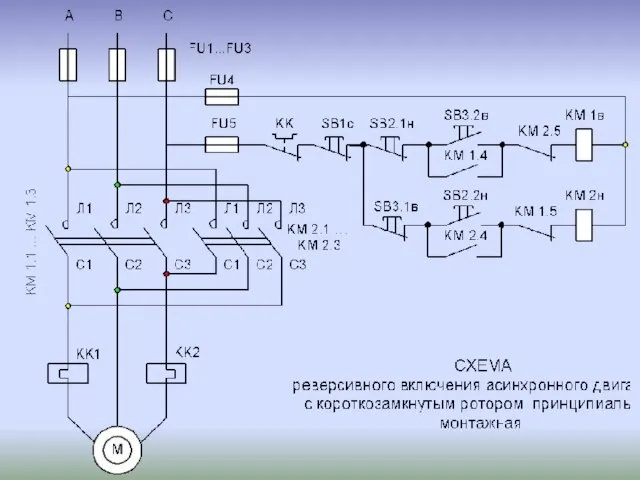
- 109. Электромагнитное торможение: 1 Торможение противовключением. Если у АД поменять местами любую пару подходящих к статору из
- 111. Динамическое торможение реализуется отключением обмотки статора от сети переменного тока и включением на постоянное напряжение
- 112. Достоинство - возможность регулировать момент торможения и точно остановить. Применяетсяв подъёмно-транспортных машинах, в циркулярных пилах, в
- 114. Скачать презентацию
Слайд 34. Частота вращения ротора.
5. Коэффициент мощности.
6. Коэффициент полезного действия
4. Частота вращения ротора.
5. Коэффициент мощности.
6. Коэффициент полезного действия
Слайд 4Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора
Электромагнитные процессы в асинхронном двигателе аналогичны процессам, происходящим в трансформаторе. Обмотку статора
Слайд 5АД при заторможенном роторе
Вращающееся магнитное поле статора, пересекая неподвижные обмотки статора и
АД при заторможенном роторе Вращающееся магнитное поле статора, пересекая неподвижные обмотки статора и
Слайд 6Ток холостого хода IO АД из-за наличия воздушного зазора между ротором и
Ток холостого хода IO АД из-за наличия воздушного зазора между ротором и
Слайд 7Реактивная составляющая тока Iо является намагничивающей, так как она создает поток Ф.
Реактивная составляющая тока Iо является намагничивающей, так как она создает поток Ф.
Слайд 8Векторная
диаграмма
АД при
нагрузке
Векторная
диаграмма
АД при
нагрузке
Слайд 9Для уменьшения тока холостого хода заводы-изготовители стремятся выполнить в асинхронных двигателях минимально
Для уменьшения тока холостого хода заводы-изготовители стремятся выполнить в асинхронных двигателях минимально
Слайд 10Асинхронный двигатель при вращающемся роторе:
Вращающийся магнитный поток статора, обгоняя ротор, индуктирует в
Асинхронный двигатель при вращающемся роторе: Вращающийся магнитный поток статора, обгоняя ротор, индуктирует в
Слайд 11Ток вращающегося ротора
Ток вращающегося ротора
Слайд 12Основные уравнения приведенного АД
Уравнение равновесия
напряжений в обмотке статора
Основные уравнения приведенного АД
Уравнение равновесия
напряжений в обмотке статора
Слайд 13Уравнение равновесия
напряжений в обмотке ротора
Приведение роторной обмотки
осуществляется к числу витков
Уравнение равновесия
напряжений в обмотке ротора
Приведение роторной обмотки
осуществляется к числу витков
Слайд 14Схемы замещения АД
Для расчета характеристик АД и исследования различных режимов его работы
Схемы замещения АД Для расчета характеристик АД и исследования различных режимов его работы
Слайд 15Большое практическое применение для анализа работы АД находит
Г-образной схемой замещения
Погрешность
Большое практическое применение для анализа работы АД находит
Г-образной схемой замещения
Погрешность
Слайд 16 Обозначения: r1 и x1– активное и индуктивное сопротивления фазной обмотки статора;
Обозначения: r1 и x1– активное и индуктивное сопротивления фазной обмотки статора;
Слайд 17параметры намагничивающей ветви схемы. Индуктивная составляющая является индуктивным сопротивлением взаимной индукции. Как
параметры намагничивающей ветви схемы. Индуктивная составляющая является индуктивным сопротивлением взаимной индукции. Как
Слайд 18Сопротивление _ _ _ _ _ _ _ _ _ _ _
Сопротивление _ _ _ _ _ _ _ _ _ _ _
Слайд 19Из Г-образной схемы замещения приведенный ток роторной обмотки
Из Г-образной схемы замещения приведенный ток роторной обмотки
Слайд 20Энергетическая диаграмма АД
Энергетическая диаграмма АД
Слайд 21К АД из сети подводится активная мощность
Часть этой мощности затрачивается на
К АД из сети подводится активная мощность
Часть этой мощности затрачивается на
Слайд 22Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью
Рэм=
Остальная мощность электромагнитным путем передается на ротор и называется электромагнитной мощностью
Рэм=
Слайд 23Магнитные потери в роторе из-за малой частоты перемагничивания стали (0,5...2)Гц малы, и
Магнитные потери в роторе из-за малой частоты перемагничивания стали (0,5...2)Гц малы, и
Слайд 24Добавочные потери ΔРдоб связаны с высшими гармониками МДС в магнитном поле из-за
Добавочные потери ΔРдоб связаны с высшими гармониками МДС в магнитном поле из-за
Слайд 25КПД асинхронного двигателя:
КПД асинхронного двигателя:
Слайд 26КПД асинхронных двигателей достаточно высокий – от 0,7 до 0,95,
причем КПД
КПД асинхронных двигателей достаточно высокий – от 0,7 до 0,95, причем КПД
Слайд 27КПД асинхронного двигателя:
КПД асинхронного двигателя:
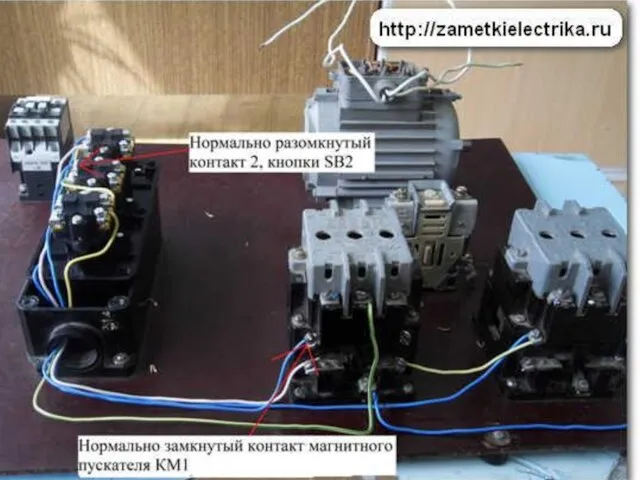
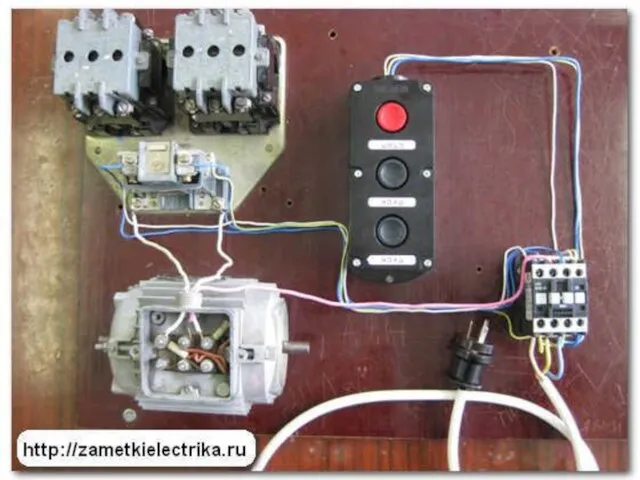
Слайд 28Реверс – это изменение направления вращения ротора. Необходимо изменить направление вращения магнитного
Реверс – это изменение направления вращения ротора. Необходимо изменить направление вращения магнитного

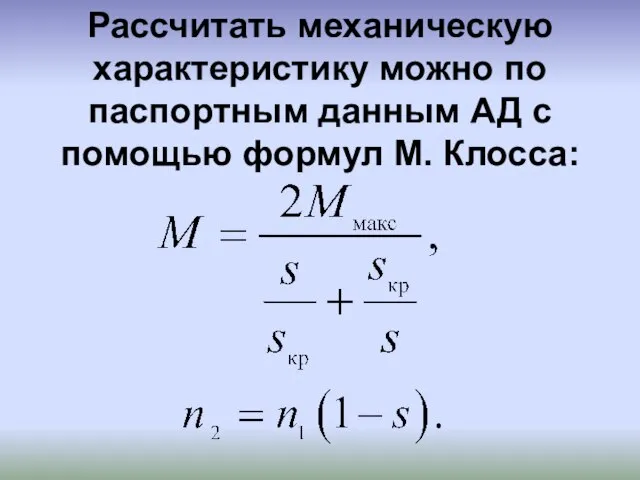
Слайд 33Рассчитать механическую характеристику можно по паспортным данным АД с помощью формул М.
Рассчитать механическую характеристику можно по паспортным данным АД с помощью формул М.
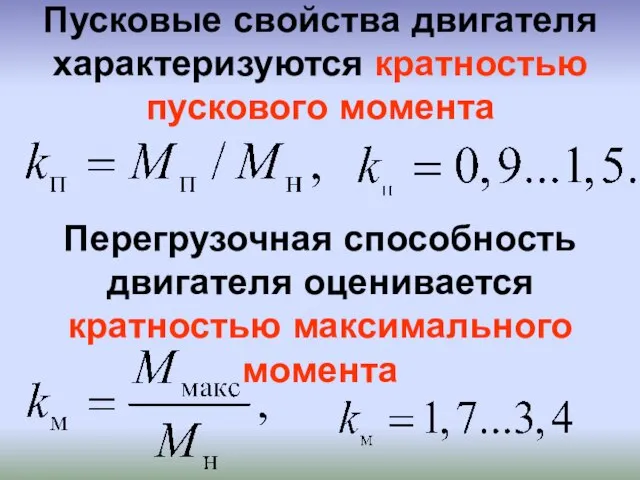
Слайд 34Пусковые свойства двигателя характеризуются кратностью пускового момента
Перегрузочная способность двигателя оценивается кратностью
Пусковые свойства двигателя характеризуются кратностью пускового момента Перегрузочная способность двигателя оценивается кратностью
Слайд 35Критическое скольжение
Максимальный момент
Критическое скольжение
Максимальный момент
Слайд 36Зависимость М = f(s)
Зависимость М = f(s)
Слайд 37Максимальный момент не зависит от активного сопротивления обмотки ротора , однако это
Максимальный момент не зависит от активного сопротивления обмотки ротора , однако это
Слайд 38Для двигателей с фазным ротором при пуске (s = 1) в цепь
Для двигателей с фазным ротором при пуске (s = 1) в цепь
Слайд 39Зависимости М = f(s)
при различных значениях
сопротивления пускового реостата
Зависимости М = f(s)
при различных значениях
сопротивления пускового реостата

Слайд 40Зависимость М ≡ U12 является недостатком АД.
Например, если U1 понизится на
Зависимость М ≡ U12 является недостатком АД. Например, если U1 понизится на
Слайд 41Рабочие характеристики асинхронного двигателя
При изменении нагрузки двигателя происходит изменение тока I1, мощности
Рабочие характеристики асинхронного двигателя При изменении нагрузки двигателя происходит изменение тока I1, мощности
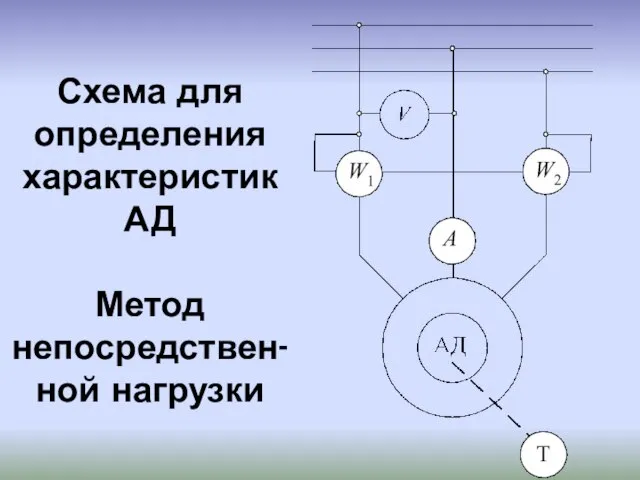
Слайд 42Схема для определения характеристик
АД
Метод непосредствен-ной нагрузки
Схема для определения характеристик
АД
Метод непосредствен-ной нагрузки
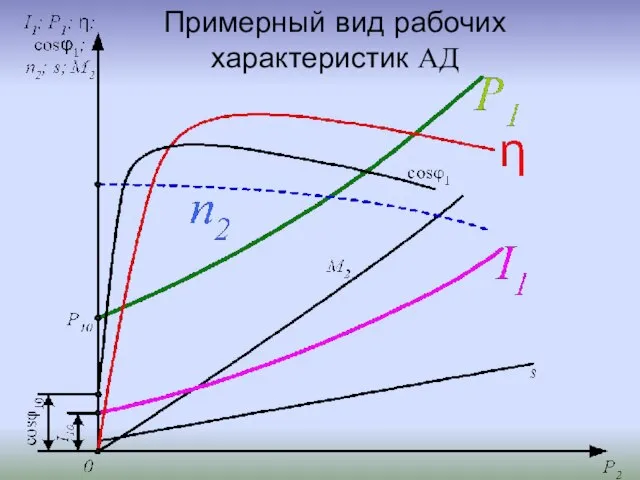
Слайд 43Примерный вид рабочих характеристик АД
Примерный вид рабочих характеристик АД
Слайд 44При холостом ходе (P2=0 и M2=0) ток I1 равен току холостого хода
При холостом ходе (P2=0 и M2=0) ток I1 равен току холостого хода
Слайд 45Мощность P10 при холостом ходе расходуется на потери внутри машины:
-механические потери
Мощность P10 при холостом ходе расходуется на потери внутри машины: -механические потери
Слайд 46Увеличение момента M2 сопровождается увеличением тока ротора I2, что связано с увеличением
Увеличение момента M2 сопровождается увеличением тока ротора I2, что связано с увеличением
Слайд 47Пуск в ход АД
n=0
В момент пуска ротор неподвижен и в роторе
Пуск в ход АД n=0 В момент пуска ротор неподвижен и в роторе
Слайд 48При пуске должны удовлетворяться требования: - пуск должен быть простым; - пусковой
При пуске должны удовлетворяться требования: - пуск должен быть простым; - пусковой
Слайд 49 Практически используют следующие способы пуска:
1. Включение обмотки статора в сеть (прямой
Практически используют следующие способы пуска: 1. Включение обмотки статора в сеть (прямой
Слайд 50Применяют для пуска АД с короткозамкнутым ротором.
Если МП < МС, то двигатель
Применяют для пуска АД с короткозамкнутым ротором. Если МП < МС, то двигатель
Слайд 51Для АД с короткозамкнутым ротором мощностью
0,6–100 кВт: kп = Mп/Mн =
Для АД с короткозамкнутым ротором мощностью 0,6–100 кВт: kп = Mп/Mн =
Слайд 52Пуск при пониженном напряжении. Для АД с КЗР большой мощности. Понижение напряжения
Пуск при пониженном напряжении. Для АД с КЗР большой мощности. Понижение напряжения
Слайд 53Пуск при пониженном напряжении.
Для АД с КЗР
с помощью автотрансфор-матора (дороже)
с
Пуск при пониженном напряжении.
Для АД с КЗР
с помощью автотрансфор-матора (дороже)
с
Слайд 55При включении обмотки статора по схеме Y линейные токи уменьшаются в 3
При включении обмотки статора по схеме Y линейные токи уменьшаются в 3
Слайд 56Механические характеристики при включении обмотки статора
АД по схемам Y и ∆
Механические характеристики при включении обмотки статора АД по схемам Y и ∆
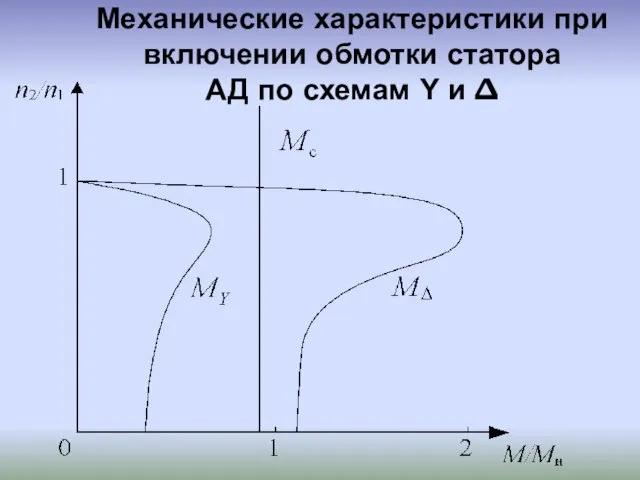
Слайд 57Недостаток: пусковой и вращающий моменты двигателя, пропорциональные квадрату напряжения сети, уменьшаются в
Недостаток: пусковой и вращающий моменты двигателя, пропорциональные квадрату напряжения сети, уменьшаются в
Слайд 58Пуск с помощью реостата в цепи ротора. Применяют только для пуска АД
Пуск с помощью реостата в цепи ротора. Применяют только для пуска АД
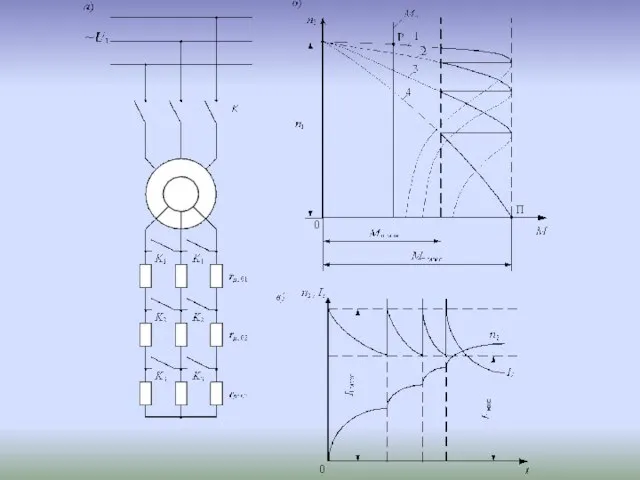
Слайд 60Включение сопротивления уменьшает пусковой ток двигателя
Включение сопротивления уменьшает пусковой ток двигателя
Слайд 61Увеличение Mп за счет включения пускового реостата в цепь ротора при пуске
Увеличение Mп за счет включения пускового реостата в цепь ротора при пуске
Слайд 62Недостаток пуска АД с фазным ротором – сложность.
Кроме того, АД с
Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с
Слайд 63Недостаток пуска АД с фазным ротором – сложность.
Кроме того, АД с
Недостаток пуска АД с фазным ротором – сложность. Кроме того, АД с
Слайд 64Из формулы
следует, что частоту вращения можно регулировать изменяя :
1.- частоту
Из формулы следует, что частоту вращения можно регулировать изменяя : 1.- частоту
Слайд 65В качестве источника изменения частоты применяются полупроводниковые преобразователи частоты
Частотное регулирование
В качестве источника изменения частоты применяются полупроводниковые преобразователи частоты
Частотное регулирование
Слайд 66Область применения: насосы,
лифты , компрессоры,
экструдеры, вентиляторы,
станки
Область применения: насосы,
лифты , компрессоры,
экструдеры, вентиляторы,
станки


Слайд 681-2,5 кВт
180-200 $
1-2,5 кВт
180-200 $

Слайд 69изменением частоты f1 питающего напряжения!!!
изменением частоты f1 питающего напряжения!!!

Слайд 72Структурная схема частотных преобразователей со звеном постоянного тока компаний Omron и Yaskawa
Структурная схема частотных преобразователей со звеном постоянного тока компаний Omron и Yaskawa

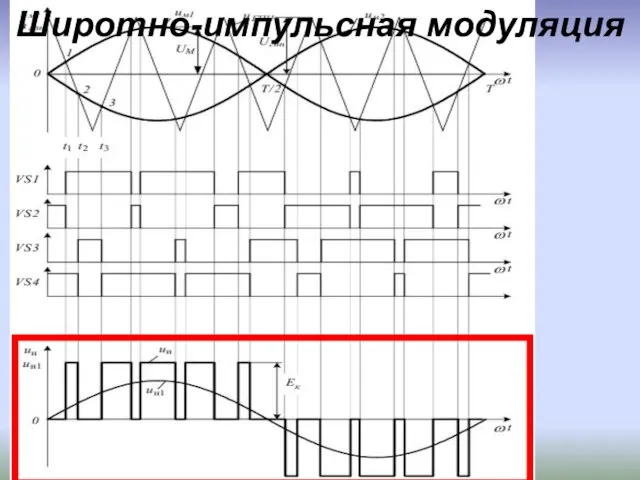
Слайд 73Широтно-импульсная модуляция
Широтно-импульсная модуляция
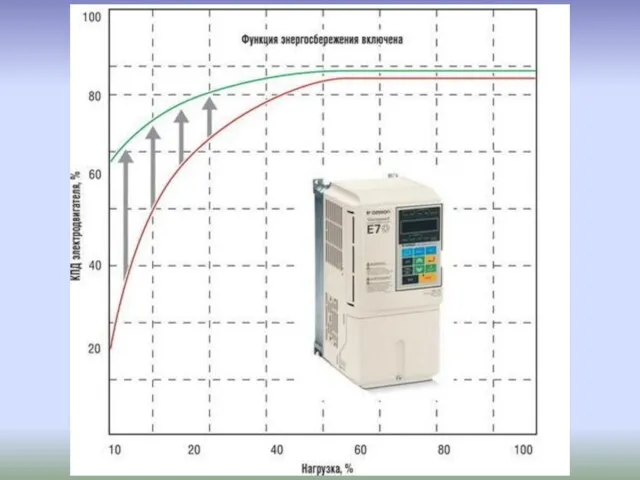
Слайд 75Надежность частотных преобразователей Omron
Надежность частотных преобразователей Omron

Слайд 76При частотном регулировании одновременно с изменением частоты f1 приходится изменять и подводимое
При частотном регулировании одновременно с изменением частоты f1 приходится изменять и подводимое
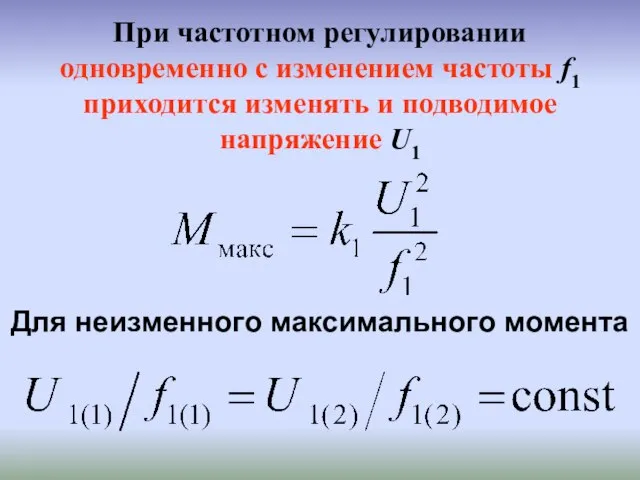
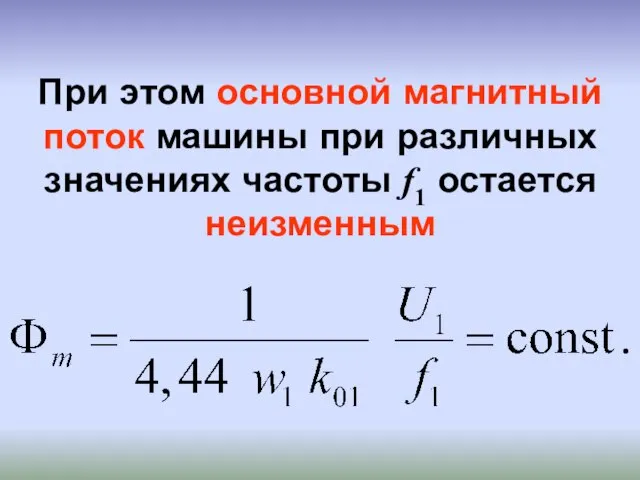
Слайд 77При этом основной магнитный поток машины при различных значениях частоты f1 остается
При этом основной магнитный поток машины при различных значениях частоты f1 остается
Слайд 78Механические характеристики АД
при частотном регулировании Mмакс = const
Механические характеристики АД
при частотном регулировании Mмакс = const
Слайд 792) переключением числа пар полюсов p
2) переключением числа пар полюсов p
Слайд 80Многоскоростные АД применяют для электропривода станков и лифтовых асинхронных двигателей.
Многоскоростные АД применяют для электропривода станков и лифтовых асинхронных двигателей.
Слайд 81Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными.
Они выпускаются на
Асинхронные двигатели с переключением числа пар полюсов называют многоскоростными. Они выпускаются на
Слайд 82Из всех способов регулирования способ переключения числа пар полюсов наиболее экономичный, хотя
Из всех способов регулирования способ переключения числа пар полюсов наиболее экономичный, хотя
Слайд 83Регулирование частоты вращения
изменением числа пар полюсов
Регулирование частоты вращения
изменением числа пар полюсов
Слайд 84Механические характеристики АД при частотном регулировании
Механические характеристики АД при частотном регулировании
Слайд 85Мех. характеристики двухскоростного двигателя
с переключением числа пар полюсов в отношении 2:1
Мех. характеристики двухскоростного двигателя
с переключением числа пар полюсов в отношении 2:1
Слайд 86Данный способ регулирования частоты вращения применяется только для АД с короткозамкнутым ротором.
Данный способ регулирования частоты вращения применяется только для АД с короткозамкнутым ротором.

Слайд 87Регулирование частоты вращения АД путем включения в цепь ротора добавочного активного сопротивления.
Регулирование частоты вращения АД путем включения в цепь ротора добавочного активного сопротивления.

Слайд 88Регулировочный реостат должен быть рассчитан на длительный режим работы.
Регулировочный реостат должен быть рассчитан на длительный режим работы.
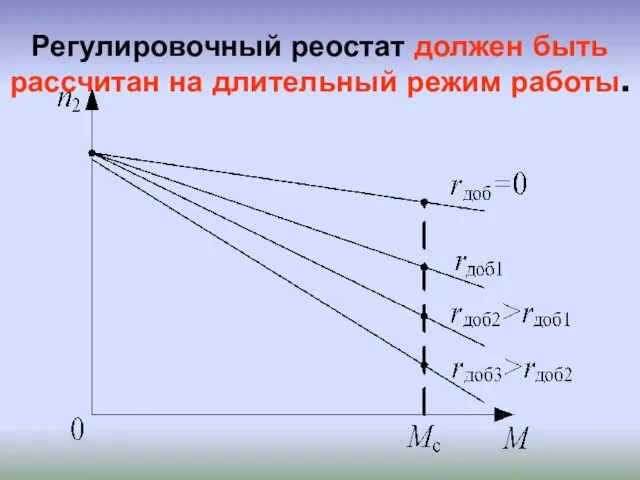
Слайд 89Недостатком этого способа являются большие потери энергии в добавочных сопротивлениях.
На практике
Недостатком этого способа являются большие потери энергии в добавочных сопротивлениях. На практике
Слайд 90Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой
Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой
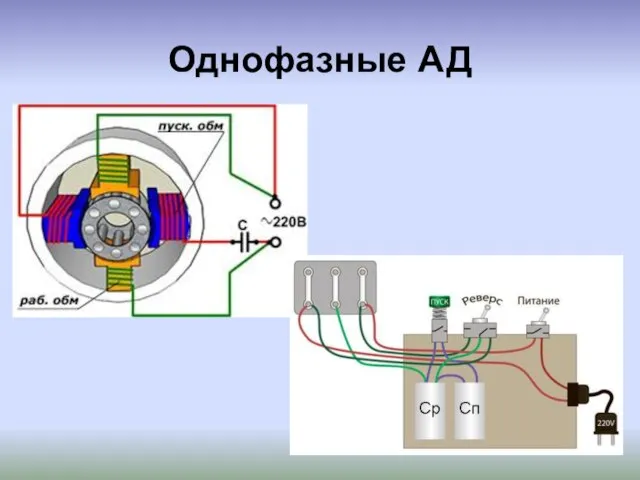
Слайд 91Однофазные АД
Однофазные АД
Слайд 92Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой
Используются в вентиляторах, компрессоров холодильников, приводов барабанов стиральных машин, и другой бытовой

Слайд 94Центробежный переключатель подключает пусковую обмотку двигателя перед пуском и отключает после окончания
Центробежный переключатель подключает пусковую обмотку двигателя перед пуском и отключает после окончания
Слайд 95В однофазном АД обмотка статора создает
неподвижный поток, изменяющийся во времени, а
В однофазном АД обмотка статора создает неподвижный поток, изменяющийся во времени, а
Слайд 96Неподвижный пульсирующий магнитный поток представляется суммой двух круговых вращающихся полей, имеющих одинаковые
Неподвижный пульсирующий магнитный поток представляется суммой двух круговых вращающихся полей, имеющих одинаковые
Слайд 97Разложение пульсирующего поля на два вращающихся
Разложение пульсирующего поля на два вращающихся
Слайд 98Зависимости М = f(s) от прямого и обратного вращающихся полей
Зависимости М = f(s) от прямого и обратного вращающихся полей
Слайд 99Моменты Mпр и Mобр направлены в противоположные стороны, а результирующий момент однофазного
Моменты Mпр и Mобр направлены в противоположные стороны, а результирующий момент однофазного
Слайд 100 Однофазный АД не имеет пускового момента; он будет вращаться в ту
Однофазный АД не имеет пускового момента; он будет вращаться в ту
Слайд 101Чтобы получить пусковой момент, однофазные АД снабжают пусковой обмоткой (ПО), расположенной со
Чтобы получить пусковой момент, однофазные АД снабжают пусковой обмоткой (ПО), расположенной со
Слайд 102Пусковой конденсатор
Пусковой конденсатор

Слайд 103Поскольку включение второй обмотки существенно улучшает механическую характеристику двигателя, в некоторых случаях
Поскольку включение второй обмотки существенно улучшает механическую характеристику двигателя, в некоторых случаях
Слайд 104Недостатком его является сравнительно большая масса и габариты конденсатора.
Недостатком его является сравнительно большая масса и габариты конденсатора.

Слайд 105Ограничения при их применении:
- однофазные АД нельзя использовать в режиме холостого хода
Ограничения при их применении: - однофазные АД нельзя использовать в режиме холостого хода
Слайд 106 Асинхронная машина в режиме
генератора Для самовозбуждения генератора должны выполняться следующие
Асинхронная машина в режиме генератора Для самовозбуждения генератора должны выполняться следующие
Слайд 107Самовозбуждение асинхронного генератора
Процесс самовозбуждения
Схема включения
в генерат. режим
Самовозбуждение асинхронного генератора
Процесс самовозбуждения
Схема включения
в генерат. режим
Слайд 108 Недостатки асинхр. генератора:
– необх. конденсаторные батареи;
– проблемы при работе
Недостатки асинхр. генератора: – необх. конденсаторные батареи; – проблемы при работе
Слайд 109Электромагнитное торможение:
1 Торможение противовключением. Если у АД поменять местами любую пару подходящих
Электромагнитное торможение: 1 Торможение противовключением. Если у АД поменять местами любую пару подходящих
Слайд 111 Динамическое торможение реализуется отключением обмотки статора от сети переменного тока и
Динамическое торможение реализуется отключением обмотки статора от сети переменного тока и

Слайд 112 Достоинство
- возможность регулировать момент торможения и точно остановить. Применяетсяв подъёмно-транспортных
Достоинство - возможность регулировать момент торможения и точно остановить. Применяетсяв подъёмно-транспортных
 Морфлот и ВДВ
Морфлот и ВДВ Задачи про кошек и кроликов
Задачи про кошек и кроликов Переборные алгоритмы
Переборные алгоритмы Главная тайна растений
Главная тайна растений ОХЛАЖДЕННАЯ ГОВЯДИНА С ОСТРОВА ТАСМАНИЯ
ОХЛАЖДЕННАЯ ГОВЯДИНА С ОСТРОВА ТАСМАНИЯ Являются ли современные итальянцы прямыми потомками древних римлян?
Являются ли современные итальянцы прямыми потомками древних римлян? Первый раз – в первый класс!
Первый раз – в первый класс! Изготовление снежинки 1-2 класс
Изготовление снежинки 1-2 класс Древние мыслители о мире и человеке
Древние мыслители о мире и человеке Адресация в сети Интернет. Решение задач
Адресация в сети Интернет. Решение задач Деепричастие как часть речи
Деепричастие как часть речи Kursovaya_po_Strat_Men
Kursovaya_po_Strat_Men SEO оптимизация за сайтове на малкия и среден бизнес
SEO оптимизация за сайтове на малкия и среден бизнес КП Гаудеамус — гимн молодости
КП Гаудеамус — гимн молодости ООО «Главземпроект» (Москва) представляет программу «СМЕТА-2011»
ООО «Главземпроект» (Москва) представляет программу «СМЕТА-2011» Welcome to English club of MSUMD
Welcome to English club of MSUMD Требования ФГОС и их реализация в преподавании предмета «Музыка» в начальной школе
Требования ФГОС и их реализация в преподавании предмета «Музыка» в начальной школе Санкт-Петербург: поэзия рек и каналов
Санкт-Петербург: поэзия рек и каналов В гости к буренке
В гости к буренке Повторение пройденного материала Ответить на вопросы: 1. Как выбрать место для костра? 2. Расскажите о порядке разжигание костра. 3. К
Повторение пройденного материала Ответить на вопросы: 1. Как выбрать место для костра? 2. Расскажите о порядке разжигание костра. 3. К Сергей Александрович Есенин
Сергей Александрович Есенин  Смеси на основе морской соли Соль морей
Смеси на основе морской соли Соль морей МОЁ ХОББИ-
МОЁ ХОББИ- Сергей Халяпин Citrix Systems Николай Романовский ОЛЛИ SP203.
Сергей Халяпин Citrix Systems Николай Романовский ОЛЛИ SP203. Верхняя и нижняя подачи
Верхняя и нижняя подачи Английский
Английский Структура общества и её элементы
Структура общества и её элементы Презентация Муниципального образовательного учреждения Большеполянская средняя общеобразовательная школа Алексеевского муни
Презентация Муниципального образовательного учреждения Большеполянская средняя общеобразовательная школа Алексеевского муни